

Enhancing Tower Crane Safety: A UAV-Based Intelligent Inspection Approach
1
Intelligent Construction Equipment Research Institute, Construction Third Engineering Bureau Group (Shenzhen) Co., Ltd., Shenzhen 510000, China
2
College of Civil Engineering, Nanjing Tech University, Nanjing 211816, China
*
Author to whom correspondence should be addressed.
Buildings 2024, 14(5), 1420; https://doi.org/10.3390/buildings14051420
Submission received: 18 April 2024
/
Revised: 10 May 2024
/
Accepted: 11 May 2024
/
Published: 15 May 2024
(This article belongs to the Topic Smart Material and Smart Construction Technologies for Urban Development)
Abstract
:Tower cranes play a crucial role in the construction industry, facilitating the vertical and horizontal movement of materials and aiding in building construction, especially for high-rise structures. However, tower crane accidents can lead to severe consequences, highlighting the importance of effective safety management and inspection. This paper presents a novel approach to tower crane safety inspections using Unmanned Aerial Vehicles (UAVs) equipped with high-definition cameras and an intelligent inspection APP system. The system utilizes real-time kinematic (RTK) positioning and digital image processing to perform efficient and comprehensive inspections, reducing the reliance on manual labor and associated risks. A case study demonstrated the method’s practicality and effectiveness, with the UAV inspections capable of identifying 76.3% of major hazards, 64.8% of significant hazards, and 76.2% of general hazards within a 30-minute timeframe. Preliminary identification rates were also promising. Despite the initial requirement for manual drone piloting and the current manual review of images, the approach shows significant potential for enhancing safety in the construction industry. Future work will focus on integrating AI for hazard recognition and automating the inspection process further. The proposed method marks a step forward in tower crane safety management, offering a more efficient and accurate alternative to traditional inspection methods.
1. Introduction
The construction industry is considered one of the most dangerous industries that threaten the lives of site personnel [1]. On construction sites, tower cranes are mainly used for the vertical and horizontal conveying of materials and installation. Once a tower crane accident occurs, it often causes serious consequences [2,3,4,5]. On 26 July 2023, a crane collapsed in New York City, injuring 12 people, including nine civilians and three firefighters (CNN). On the morning of 16 November 2023, in a shipyard in Sumoto City, Hyogo Prefecture, there was an accident where a part of a dismantled crane fell, and two male workers involved in the incident were left in a critical condition, unconscious. Therefore, the safety management of tower cranes is particularly important.
In the past two decades, there has been a significant increase in the adoption of cranes in the construction industry around the world [6], and researchers have also shown increasing interest in researching crane safety issues. Some previous studies in this area found that the safety performance of tower cranes was affected by multiple dimensions, including management, equipment, environmental factors, and human actions [7,8,9,10]. According to world statistics, 23% of crane accidents are caused by wind interference and 38% are operational errors [2]. Using the method of system thinking and case analysis, Zhang [11] confirmed that the key causes of tower crane accidents include insufficient safety inspection and other factors, and put forward a series of suggestions on the improvement of tower crane safety management and accident prevention. Sadeghi [12] produced a comprehensive analysis of the main crane risk factors studied in the existing literature, pointed out eight risk factors that scholars paid limited or no attention to, and found that the risk factors related to crane equipment are a hotspot, since they are involved in half of the research studies. Zhang [13] proposed that safety is the key goal of construction management, and construction management can identify key factors and take key measures to improve safety performance more effectively. The tower crane is an integral component of construction management. In order to ensure the safety of the tower crane, it is imperative to meticulously examine its critical components and identify potential hazards, thereby enhancing safety performance more effectively. Equipment defects (loose bolts, device damage, etc.) and some potential hazards (e.g., poor ground conditions) can be found in advance by carrying out safety inspections [14]. The purpose of safety inspections is to eliminate the danger of a tower crane, ensure the safety of personnel, and at the same time, repair the damage to the crane itself timely and extend its service life. Therefore, inspections of tower cranes are an essential working process.
The use of UAVs for monitoring and inspection in the construction industry has garnered considerable attention in recent years due to their potential to enhance safety, efficiency, and accuracy [15,16,17,18,19]. The development and application of various types of UAVs and sensors in tower crane inspection have opened up new data collection and analysis possibilities. Stein and Michae [20] conducted container gantry crane inspections with UAVs, high-definition images were obtained, and it was validated that UAVs can be used for crane inspection. According to a quantitative analysis by Raviv et al. [21], crane equipment failures are the most dangerous factors causing tower crane accidents. Therefore, checking tower crane damage sites is a valuable procedure. When flying a UAV, the trajectory can be unsmooth and with large deviation, which might lead to collision [22]. Building information modeling (BIM), as an effective and efficient management tool, is used by many scholars for safety checks [23]. Combined with BIM, the effectiveness of UAVs in data capture and automatic target identification can be improved [24]. Amir Ibrahim et al. [25] developed a method based on BIM to simulate the flight route of UAVs which can review their flight safety and avoid collisions. Liu et al. [26] used the image measurement method to check and study the quality of the crane boom material, and in this way, reduce the safety risks of it. Kornilova and Safina [27] discussed the risk of steel crane beams, introduced the characteristics for periodic crane inspection, and suggested that most attention should be paid to the areas of welds, where the stress concentrates and corrosion might occur.
In tower crane inspection, UAVs are mainly used for taking photos, and then information can be extracted from the photos through some data collection methods for key analysis [28]. Diogo Ribeiro et al. [29] introduced an innovative method for remote detection of reinforced concrete (RC) structures using UAVs based on advanced digital image processing technology. Using specific heuristic feature extraction methods, this method can be applied to a 117 m high telecommunications tower to identify quality issues such as cracks. The application of UAVs in tower cranes mostly focuses on analyzing certain quality issues or key parts of the tower crane, such as detecting and evaluating corrosion of metal structures [30]. Simultaneously, the integration of UAV technology and computer vision algorithms enables the assessment and identification of bridge crack widths, as well as the determination of safe load capacity for passage. UAVs primarily serve two functions in structural bridge analysis: damage detection through visual sensors and 3D model reconstruction [31,32,33]. Many researchers also pay more attention to the study of trajectory planning of UAVs in tower crane inspections [34], mainly to prevent UAV collisions or improve efficiency.
In this work, based on real-time kinematic (RTK) positioning and digital image processing technology, a tower crane intelligent inspection system is designed. Using the DJI UAV MSDK (Mobile SDK) toolkit, the tower crane intelligent inspection APP is compiled in Android Studio and installed on the UAV remote control, which is developed through Java/Kotlin programming. Considering the requirements of national codes for tower crane inspection [35,36,37,38,39,40,41], the APP can conduct efficient and convenient intelligent inspection of various components of tower cranes, such as standard sections, attachments, lifting and turning devices, lifting arms, balance arms, driver’s cab, tower caps, etc. This significantly reduces the intensity and risk of manual inspection of tower cranes, shortens the time of tower crane inspections about 2 h, improves the coverage of tower crane inspections, and realizes automatic and intelligent tower crane inspections. A field test case was used to compare the performance of intelligent inspection and manual inspection in terms of time efficiency and detection coverage. It demonstrates that intelligent detection exhibits significant advantages over manual detection in both aspects.
2. Inspection Requirements for Tower Cranes
Before operating tower cranes, inspections should be conducted to ensure that the tower crane meets certain standards, which is a high-priority requirement for the tower crane drivers and the safety condition of the tower crane itself. Regular inspection of tower cranes includes appearance inspection and functional testing. Before an inspection, inspectors need to review the previous inspection report and recorded operating data to learn the service time of each part of the tower crane based on these data. During regular inspections, the following contents should be inspected: the signs and labels of the tower crane, user manuals, maintenance records, component equipment, steel structures, foundations and attachments, estimating age conditions based on equipment appearance, and functional testing under rated load conditions.
UAVs can be helpful with most of the appearance inspection process. Based on the requirements of national codes [35,36,37,38,39,40,41], the inspection items for tower cranes can be summarized as shown in Table 1. The inspection content includes component spacing, missing components, misalignment, defects, etc. With UAVs, the tower crane inspection can be comprehensive and from multiple angles, and a lot of manual operations can be saved.
3. UAV Intelligent Inspection System
3.1. Framework of the UAV Intelligent Inspection System
During tower crane inspection, problems such as high wind speed, high climbing height, and incomplete coverage are often encountered. To address these issues, RTK positioning technology is used with UAVs. RTK is a real-time differential method for processing carrier phase observations from two measurement stations, which can provide centimeter- or even millimeter-level positioning. Based on RTK positioning technology, UAV can accurately fly along preset trajectories, avoiding deviations and shaking [42,43], and capture clear and stable tower crane images. By capturing images of various components of the tower crane, the hidden dangers of the tower crane can be identified.
When designing an intelligent inspection system for unmanned aerial vehicles, planning the route, flight direction, and hovering position is necessary, since these directly determine the scope and quality of tower crane inspections. A tower crane is mainly composed of a vertical structure (standard section of the tower body, lifting and turning device, tower cap) and a horizontal structure (lifting arm, balance arm, attachment, etc.). Taking the standard section of the tower body as an example, Figure 1 shows the route design of the vertical structure inspection of the tower crane. There are two flight routes. The first is a circling flight route, as shown in Figure 1a. The UAV first circles a standard section horizontally, then climbs vertically to the standard section above, and then the next round. The above actions cycle until all standard sections are covered. The other is a Z-type lift flight route, as shown in Figure 1b. The UAV climbs vertically along the main limb of the standard sections to the top. Then, it flies horizontally to the adjacent main limb, and vertically descends. Compared to the Z-type lift flight route, the circling flight route provides a more detailed inspection of the support beams of the standard sections, but it involves longer flight paths and lower efficiency. Additionally, there is a possibility that during the inspection process, the drone may come too close to the wall-climbing device, triggering obstacle avoidance sensors or colliding with it, which could lead to an early termination of the flight. Both flight routes can be flexibly chosen based on the actual layout of the tower crane and the surrounding environment. Figure 2 shows the route design of a similar horizontal structure taking a lifting arm as an example. It can be seen from Figure 2 that the UAV can shoot along the direction of the boom arm, and the shooting interval or shooting distance can be set according to actual inspection requirements. Overall, the basic principle of flight route design is to optimize the flight path to meet inspection requirements and cover the tower crane structure as much as possible, ensure UAV flight safety, and improve detection efficiency.
After completing the flight mission of the route, inspectors can choose whether to save the route with the unmanned aerial vehicle intelligent inspection application, and the route can be saved by filling in the relevant parameter instructions (tower crane number, inspected organization, and route marking). When re-inspecting the same tower crane, inspectors can easily and efficiently complete tower crane inspection tasks by reusing saved routes, achieving one-click takeoff and automatic inspection. Tower crane inspections might be aborted due to various reasons such as low power of the UAV, low power of the remote controller, weather changes (short-term strong winds, rain), and other emergencies. The flight mission can be suspended by exiting the current operating interface. The intelligent inspection application will automatically remember the location of the break point for this task, and when entering the application again, it will execute from the break point and recover the flight.
To make sure the images cover the whole tower crane, the rate of overlap between images in both vertical and horizontal directions should be above a certain value. For a surveying job, the recommended overlap rate is 70% or more. For an inspection job, a 20–30% overlap is enough as the end goal is not to process the images into a map. Take the DJI Mavic 3E as an example. The field of view (FOV) in degrees (°) of the Hasselblad camera is 84°, and the relationship between the image height (or width) is shown in Equation (1). Although the orientation of the camera can be adjusted with a Pan/Tilt/Zoom (PTZ) system, it will be still during inspection since images are taken in flying conditions.
According to the information given above, the maximum step length to take images in the vertical direction can be calculated with Equation (2) for an inspection job (taking the overlap rate to be 30%), and Equation (3) for a surveying job or a 3D reconstruction job, respectively. The step length in the horizontal direction can be calculated in the same way.
In which is the distance between the tower crane and the UAV, h and w represents the height and width of image, respectively, as shown in Figure 3. The hover accuracy of the DJI Mavic 3 is ±0.5 m, and should be much larger than this value to keep safe for both the crane tower and UAV. On the contrary, to obtain enough detailed information from images for inspection, should be no larger than 20 m.
3.2. Technical Parameters of the UAV Intelligent Inspection System
The intelligent inspection system is designed for universal models of DJI UAVs, while here in this work, the DJI Mavic 3E, as shown in Figure 4, is used as a typical example to validate it. The Mavic 3E has the characteristics of being compact and flexible, making it easy to carry during work.
Table 2 presents the basic information of it. The Mavic 3E is equipped with omnidirectional obstacle avoidance technology and has a 4/3CMOS wide-angle camera. The lens supports 56× hybrid zoom, allowing for high-resolution shooting of distant targets. High-resolution shooting is crucial for tower crane inspections, as it can detect minor safety hazards and detail issues. At the same time, with RTK centimeter level high-precision positioning function, the Mavic 3E can fly accurately according to the preset trajectory, ensuring that every detail can be clearly captured, providing strong support for intelligent inspection of tower cranes.
To drive the DJI Mavic 3E UAV fly and shoot around the tower crane, based on the DJI MSDK development toolkit, a customized application is developed through Java/Kotlin programming. The UAV flight route planning for three-dimensional spatial tower crane inspection mentioned in the previous section is integrated in this application. The tower crane intelligent inspection APP is compiled in Android Studio and installed on the UAV remote control. The basic operation procedure of the tower crane intelligent inspection application is shown in Figure 5. The tower crane intelligent inspection application includes two functional modules: tower crane inspection and tower crane display.
The tower crane inspection module is used to drive UAVs to fly around the tower crane and take high-definition photos. This module includes the inspection plan of each component of the tower crane. Users can choose different components to inspect according to their needs, such as the tower body, tower arms, balance arms, etc. In addition, it also provides pre-flight settings, including advanced settings such as RTK, to ensure that the UAV can accurately locate and shoot tower cranes. It can mark the captured waypoints, upload route tasks, save a route, go around some areas, and resume flight at breakpoints. These functions enable users to flexibly control the flight trajectory and shooting method of the UAV, achieving comprehensive and high-precision inspection of tower cranes.
The tower crane display module displays, downloads, and edits tower crane image data captured by the UAV for users. The tower crane image data captured by the UAV will be transmitted in real time to the application, and will be arranged automatically by the inspection parts. Subsequently, users can load these image data to a personal computer for viewing and analysis. By comparing with historical data or standard templates, users can quickly locate and identify safety hazards of tower cranes, such as structural deformation, rust, and loose bolts.
4. Case Study
A field test was conducted to validate the unmanned aerial vehicle intelligent inspection software in the Changsha Greenland New Metropolitan Project. The project is located at the southwest corner of the cross of Wanjiali South Road and Environmental Protection Middle Road in Changsha City, with favorable location and convenient transportation. An overview of the project is shown in Figure 6. It can be seen from Figure 6 that the construction site environment is relatively compact and there are multiple tower cranes and other equipment, leaving high-priority requirements for the safety inspection of tower cranes. The tower crane studied in this work is a TC5613 tower crane produced by Southern Heavy Industry, as shown in Figure 7. This type of tower crane is widely used in construction sites, with the characteristics of high lifting height and strong bearing capacity. However, due to its high height and weight, manual inspection is not only difficult and inefficient, but also poses certain safety risks.
The tower crane has a height of approximately 120 m, with the total height of the standard sections being about 100 m. The width of the standard section is 1.7 m. The crane jib is about 50 m long, 1.4 m wide, and 1.2 m high, while the counterweight jib is approximately 12 m long, 3.1 m wide, and 1.3 m high. Figure 8 shows how the UAV flies around the tower crane and Figure 9 shows the interface of the intelligent inspection application, and the main window shows photos taken by the UAV on the standard section and boom of the tower crane, respectively. The structure and details of each part can be clearly seen from the automatically taken images. This helps the safety officer to have a comprehensive understanding of the status of the tower crane and accurately determine whether there are any safety hazards. Figure 10 shows typical flaw images captured by automatic inspection at different locations. These hidden danger images include loose connection bolts of the wall attachment device of the tower crane, and rust on the surface of the tower body. These flaws pose a threat to the safe operation of tower cranes. Through UAV photography, we can clearly observe the existence and location of these hazards. There may be blind spots when conducting manual inspection of the loose position of the bolt on the outer edge of the attached wall connector, while with UAVs, this hidden danger can be clearly presented if shooting from a higher altitude, providing accurate information for verifying whether it is in a safe condition.
Figure 11 shows the number of hidden dangers that can be found in different parts of the tower crane during UAV intelligent inspection, and they are categorized according to the danger level and whether they can be directly observed through UAV photos. From Figure 11, it can be seen that the most major hazard inspection items are about the attachment to the wall, reaching 37. Among them, 23 major hazards can be fully inspected by UAV, 13 major hazards require manual assistance in inspection and judgment, and 1 major hazard cannot be determined. Overall, the proportion of undetermined hazards is very low. Figure 12 shows the proportion of the total number of hidden dangers that can be fully inspected by UAV and that require manual assistance in inspection and judgment, as well as those that cannot be determined, as well as the total number of hidden danger levels. From Figure 12, it can be seen that in the major hazard levels of the standard section inspection items, UAVs can fully inspect 56% of them, 33% of them require manual assistance to inspect, and 11% cannot be determined. Some hidden dangers can be preliminarily determined through images collected by UAV, but further verification is required when personnel arrive at the relevant hidden danger areas of the tower crane, such as whether the balance arm pull rod is original, whether the foundation conversion base is original, and whether the clamp structure of the wall attachment device meets the requirements.
Table 3 summarizes the coverage rates of hidden dangers that can be fully inspected, require manual assistance for inspection, and cannot be determined in major hazards, important hazards, and general hazards. As shown in Table 3, the hidden danger coverage rates of major hazards, important hazards, and general hazards are 76.3%, 64.8%, and 76.2%, respectively. The coverage rates of hidden dangers that can be preliminarily determined of major hazards, important hazards, and general hazards are 18.5%, 27.2%, and 19%, respectively. UAV intelligent inspection can preliminarily identify nearly all types of tower crane hazards. There are two types of hidden dangers that cannot be detected and identified by UAV. The first one is those invisible hazards, since they cannot be identified through images, such as whether the verticality of the tower crane meets the requirements, whether the amplitude limiter works properly, whether the weight limiter works properly, and whether the braking device works properly. The second is those that need to be determined with sound, such as whether the pulley group of the variable amplitude trolley is normal, whether the lifting motor is operating normally, and whether there is any abnormal noise in the slewing bearing reducer.
Figure 13 shows the time required for UAV inspection of hidden dangers in different parts of the tower crane. The inspection time for a single part does not exceed 8 min, and the inspection time for the entire tower crane takes approximately 30 min. Based on the survey conducted on serval construction projects undertaken by China Construction Third Engineering Bureau Group (Shenzhen) Co., Ltd. in Shenzhen, China, it typically takes about 2.5 h to inspect the entire tower of a 100-m flat-headed tower crane with the traditional manual inspection method. Thus, the method proposed in this study significantly reduces the intensity and risk of manual inspection of tower cranes, shortens the time of tower crane inspections by about 2 h to a typical 100-m flat-headed tower crane.
5. Conclusions
This work focuses on the difficulties and problems in tower crane inspection. UAV fight strategy including path planning and shooting intervals is suggested and a UAV intelligent inspection system consisting of UAV hardware and operating software is introduced. The intelligent inspection software was custom-developed based on DJI MSDK, and with this application, images of different parts of a tower crane can be captured automatically. To check if the system functions well in practice, a field test was conducted. Based on the field test, the UAV intelligent inspection is compared with conventional manual inspection, and here are the conclusions.
- (1)
- Significant Efficiency Gains: The UAV-based intelligent inspection approach demonstrated a substantial increase in efficiency over traditional manual inspection methods. The case study conducted at the construction site revealed that a comprehensive hazard inspection of a tower crane can be effectively completed within 30 min, a significant reduction in time compared to manual procedures.
- (2)
- Improved Inspection Coverage: The proposed method showed high coverage rates in identifying major (76.3%), significant (64.8%), and general (76.2%) hazards associated with tower cranes. Preliminary identification capability also exhibited promising results with coverage rates of 18.5%, 27.2%, and 19% for the respective hazard categories. This indicates that UAV inspections can play a pivotal role in uncovering a vast array of potential safety issues.
- (3)
- Limitations and Future Research Directions: Despite the notable advancements, the study acknowledges certain limitations. Firstly, the initial inspection requires manual drone piloting for marking tower crane points, which can be time consuming. Secondly, the images captured by the drone necessitate manual review, presenting challenges when dealing with large volumes of data. Future research will focus on addressing these limitations through AI training and recognition of safety hazard images, aiming to automate the generation of inspection reports and corrective actions based on the recognition results.
- (4)
- Potential for Industry Impact: The integration of UAV technology with intelligent inspection systems holds the potential to revolutionize tower crane safety management. By reducing the reliance on manual labor and enhancing the precision and speed of inspections, this approach can lead to significant improvements in safety performance and risk mitigation within the construction industry.
Author Contributions
Conceptualization, X.J.; methodology, Y.W.; software, Z.C. and J.F.; validation, Z.C. and J.F.; formal analysis, Y.W.; investigation, X.J.; resources, X.J.; data curation, N.W.; writing—original draft preparation, N.W.; writing—review and editing, Z.Z. and Y.W.; visualization, X.J. and N.W.; supervision, X.J., X.Z. and Z.Z.; project administration, X.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The data presented in this study are available in article.
Conflicts of Interest
Authors Xin Jiao, Xin Zhang, Jian Fan and Zhenwei Cai are employed by the Construction Third Engineering Bureau Group (Shenzhen) Co., Ltd. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
- Soltanmohammadlou, N.; Sadeghi, S.; Hon, C.K.; Mokhtarpour-Khanghah, F. Realtime locating systems and safety in construction sites: A literature review. Saf. Sci. 2019, 117, 229–242. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, W.; Jiang, L.; Zhao, T. Identification of critical causes of tower-crane accidents through system thinking and case analysis. J. Constr. Eng. Manag. 2020, 146, 04020071. [Google Scholar] [CrossRef]
- Zhang, W.; Xue, N.; Zhang, J.; Zhang, X. Identification of critical causal factors and paths of tower-crane accidents in China through system thinking and complex networks. J. Constr. Eng. Manag. 2021, 147, 04021174. [Google Scholar] [CrossRef]
- Hu, S.; Fang, Y.; Moehler, R. Estimating and visualizing the exposure to tower crane operation hazards on construction sites. Saf. Sci. 2023, 160, 106044. [Google Scholar] [CrossRef]
- Jiang, L.; Zhao, T.; Feng, C.; Zhang, W. Improvement of random forest by multiple imputation applied to tower crane accident prediction with missing data. Eng. Constr. Archit. Manag. 2023, 30, 1222–1242. [Google Scholar] [CrossRef]
- Ji, Y.; Leite, F. Automated tower crane planning: Leveraging 4-dimensional BIM and rule-based checking. Autom. Constr. 2018, 93, 78–90. [Google Scholar] [CrossRef]
- Shapira, A.; Simcha, M.; Goldenberg, M. Integrative model for quantitative evaluation of safety on construction sites with tower cranes. Constr. Eng. Manag. 2012, 138, 1281–1293. [Google Scholar] [CrossRef]
- Raviv, G.; Fishbain, B.; Shapira, A. Analyzing risk factors in crane-related nearmiss and accident reports. Saf. Sci. 2017, 91, 192–205. [Google Scholar] [CrossRef]
- Raviv, G.; Shapira, A.; Fishbain, B. AHP-based analysis of the risk potential of safety incidents: Case study of cranes in the construction industry. Saf. Sci. 2017, 91, 298–309. [Google Scholar] [CrossRef]
- Chen, Y.; Zeng, Q.; Zheng, X.; Shao, B.; Jin, L. Safety supervision of tower crane operation on construction sites: An evolutionary game analysis. Saf. Sci. 2022, 152, 105578. [Google Scholar] [CrossRef]
- Win, T.M. Robotic Tower Crane Modelling Control (Rtcmc). Ph.D. Thesis, The University of New South Wales, Sydney, Australia, 2017. [Google Scholar]
- Sadeghi, S.; Soltanmohammadlou, N.; Rahnamayiezekavat, P. A Systematic Review of Scholarly Works Addressing Crane Safety Requirements. Saf. Sci. 2021, 133, 105002. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, X.; Luo, X.; Zhao, T. Reliability Model and Critical Factors Identification of Construction Safety Management Based on System Thinking. J. Civ. Eng. Manag. 2019, 25, 362–379. [Google Scholar] [CrossRef]
- Wu, H.; Zhong, B.; Li, H.; Chi, H.-L.; Wang, Y. On-Site Safety Inspection of Tower Cranes: A Blockchain-Enabled Conceptual Framework. Saf. Sci. 2022, 153, 105815. [Google Scholar] [CrossRef]
- Martinez, J.G.; Gheisari, M.; Alarcón, L.F. UAV integration in current construction safety planning and monitoring processes: Case study of a high-rise building construction project in Chile. J. Manag. Eng. 2020, 36, 05020005. [Google Scholar] [CrossRef]
- Rey, R.O.; de Melo, R.R.S.; Costa, D.B. Design and implementation of a computerized safety inspection system for construction sites using UAS and digital checklists–Smart Inspecs. Saf. Sci. 2021, 143, 105430. [Google Scholar] [CrossRef]
- Zhu, Z.; Jeelani, I.; Gheisari, M. Physical risk assessment of drone integration in construction using 4D simulation. Autom. Constr. 2023, 156, 105099. [Google Scholar] [CrossRef]
- Liang, H.; Lee, S.C.; Bae, W.; Kim, J.; Seo, S. Towards UAVs in construction: Advancements, challenges, and future directions for monitoring and inspection. Drones 2023, 7, 202. [Google Scholar] [CrossRef]
- Musarat, M.A.; Khan, A.M.; Alaloul, W.S.; Blas, N.; Ayub, S. Automated monitoring innovations for efficient and safe construction practices. Results Eng. 2024, 22, 102057. [Google Scholar] [CrossRef]
- Stein, M. Conducting Safety Inspections of Container Gantry Cranes Using Unmanned Aerial Vehicles. In Dynamics in Logistics. Lecture Notes in Logistics; Springer: Cham, Switzerland, 2018; Chapter 20; pp. 154–161. [Google Scholar] [CrossRef]
- Kim, J.-Y.; Kim, G.-H. Importance Ranking of Accident Factors of Construction Tower Crane by AHP Technique. Dep. Archit. Eng. 2020, 4, 237–244. [Google Scholar] [CrossRef]
- Tang, G.; Gu, J.; Zhu, W.; Claramunt, C.; Zhou, P. HD Camera-Equipped UAV Trajectory Planning for Gantry Crane Inspection. Remote Sens. 2022, 14, 1658. [Google Scholar] [CrossRef]
- Tak, A.N.; Taghaddos, H.; Mousaei, A.; Bolourani, A.; Hermann, U. Bim-Based 4d Mobile Crane Simulation and Onsite Operation Management. Autom. Constr. 2021, 128, 103766. [Google Scholar] [CrossRef]
- Hamledari, H.; Sajedi, S.; McCabe, B.; Fischer, M. Automation of Inspection Mission Planning Using 4d Bims and in Support of Unmanned Aerial Vehicle–Based Data Collection. J. Constr. Eng. Manag. 2021, 147, 04020179. [Google Scholar] [CrossRef]
- Ibrahim, A.; Golparvar-Fard, M. 4d Bim Based Optimal Flight Planning for Construction Monitoring Applications Using Camera-Equipped Uavs. In Computing in Civil Engineering; American Society of Civil Engineers: Reston, VA, USA, 2019; pp. 217–224. [Google Scholar] [CrossRef]
- Liu, H.; Tan, W.; Cao, S.; Li, H.; Raja, K. Image-Based Precision Measurement Technology for the Quality Inspection of Crane Boom Materials. Adv. Mater. Sci. Eng. 2022, 2022, 8379621. [Google Scholar] [CrossRef]
- Kornilova, A.V.; Safina, L.H. Some Features of the Technical Inspection of Crane Girders after a Period of Long-Term Exploitation. In Proceedings of the International Conference on Engineering Research and Application, Cairo, Egypt, 6–8 March 2022; p. 2936. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Bai, B.; Dai, H. Age-optimal trajectory planning for UAV-assisted data collection. In Proceedings of the IEEE INFOCOM 2018—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Honolulu, HI, USA, 15–19 April 2018. [Google Scholar]
- Ribeiro, D.; Santos, R.; Shibasaki, A.; Montenegro, P.; Carvalho, H.; Calçada, R. Remote inspection of RC structures using unmanned aerial vehicles and heuristic image processing. Eng. Fail. Anal. 2020, 117, 104813. [Google Scholar] [CrossRef]
- Zhou, Q.; Ding, S.; Feng, Y.; Qing, G.; Hu, J. Corrosion inspection and evaluation of crane metal structure based on UAV vision. Signal Image Video Process. 2022, 16, 1701–1709. [Google Scholar] [CrossRef]
- Peng, X.; Zhong, X.; Zhao, C.; Chen, Y.F.; Zhang, T. The Feasibility Assessment Study of Bridge Crack Width Recognition in Images Based on Special Inspection UAV. Adv. Civ. Eng. 2020, 2020, 8811649. [Google Scholar] [CrossRef]
- Aliyari, M.; Ashrafi, B.; Ayele, Y.Z. Hazards identification and risk assessment for UAV–assisted bridge inspections. Structure 2022, 18, 412–428. [Google Scholar] [CrossRef]
- Lavezzi, G.; Ciarcià, M.; Won, K.; Tazarv, M. A DIC-UAV based displacement measurement technique for bridge field testing. Eng. Struct. 2024, 308, 117951. [Google Scholar] [CrossRef]
- Chen, Q. Design of trajectory planning and 3D modeling for crane inspection based on UAV. In Proceedings of the 2022 4th International Conference on Frontiers Technology of Information and Computer (ICFTIC), Qingdao, China, 2–4 December 2022. [Google Scholar]
- GB/T 5031-2019; Tower Crane. Standards Press of China: Beijing, China, 2019.
- GB/T 31052.3-2016; Cranes—Code of Inspection and Maintenance—Part 3: Tower Cranes. Standards Press of China: Beijing, China, 2016.
- GB/T 5972-2016; Cranes-Wire Ropes-Care and Maintenance, Inspection and Discard. Standards Press of China: Beijing, China, 2016.
- TSG Q7015-2016; Lifting Appliances Periodical Inspection Regulation. Standards Press of China: Beijing, China, 2016.
- GB 50683-2011; Code for Acceptance of Field Equipment, Industrial Pipe Welding Construction Quality. Standards Press of China: Beijing, China, 2011.
- GB 5144-2006; Safety Code for Tower Cranes. Standards Press of China: Beijing, China, 2006.
- JGJ 196-2010; Technical Specification for Safety Installation Operation and Dismantlement of Tower Crane in Construction. PeStandards Press of China: Beijing, China, 2010.
- GB/T 38931-2020; General Requirements for Safety of Civil Small and Light Unmanned Aircraft System. Standards Press of China: Beijing, China, 2020.
- GB/T 42018-2022; Information Technology- Artificial Intelligence-Platform Computing Resource Specification. Standards Press of China: Beijing, China, 2022.
Figure 1.
Standard section flight path planning for tower cranes. (a) Surrounding flight route. (b) Elevated flight route.
Figure 1.
Standard section flight path planning for tower cranes. (a) Surrounding flight route. (b) Elevated flight route.

Figure 2.
Flight path planning for tower crane boom.
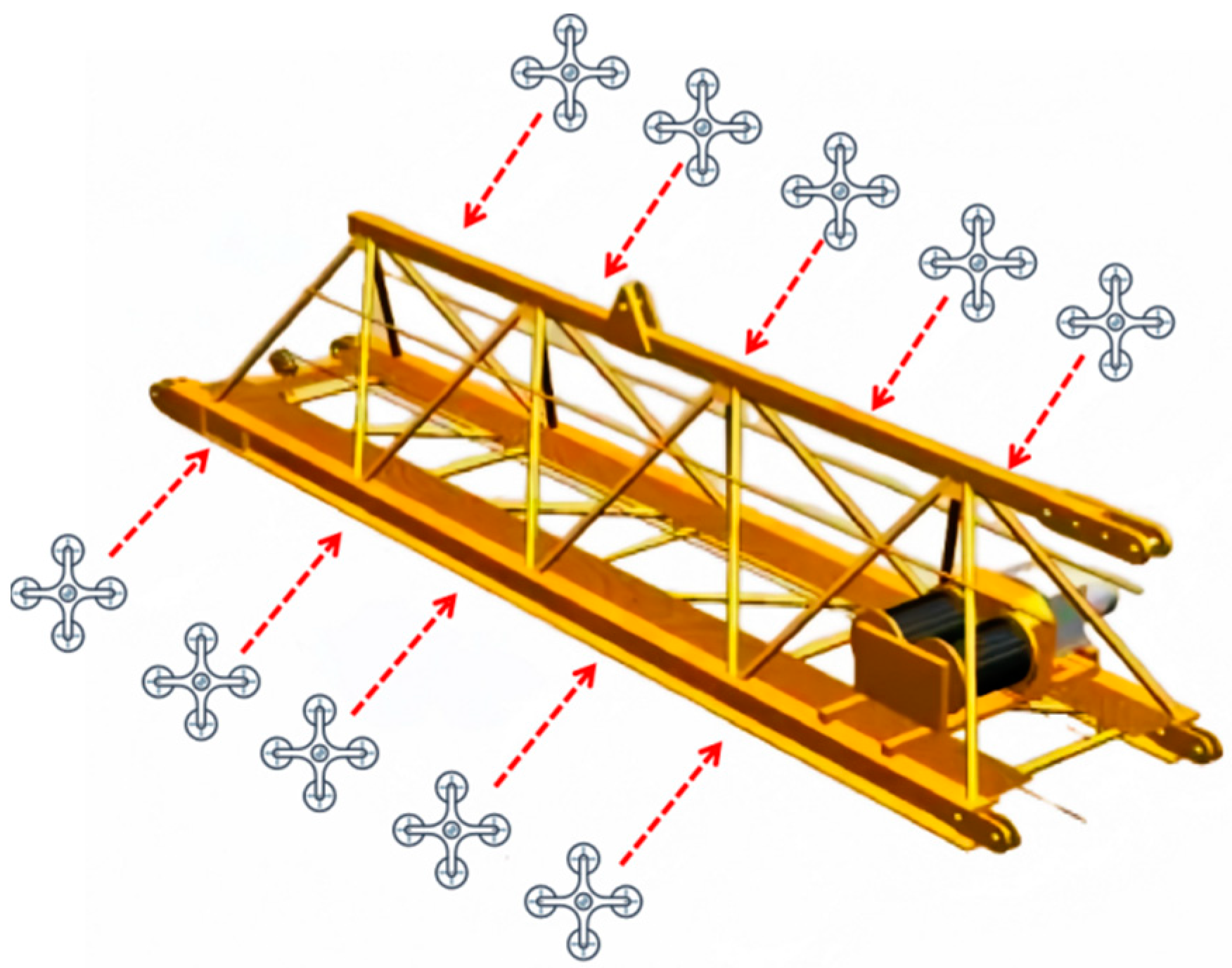
Figure 3.
Illustration of scales used to determine the step length to take images.

Figure 4.
DJI Mavic 3E and remote control.

Figure 5.
The operation procedure of the UAV intelligent inspection system.

Figure 6.
Changsha Greenland New Metropolitan Project.

Figure 7.
TC5613 tower crane.

Figure 8.
UAV shoot around a tower crane.

Figure 9.
Operating interface of the UAV intelligent inspection application. (a) Automated shooting of the standard sections by UAV. (b) Automated shooting of the tower crane boom by UAV.
Figure 9.
Operating interface of the UAV intelligent inspection application. (a) Automated shooting of the standard sections by UAV. (b) Automated shooting of the tower crane boom by UAV.
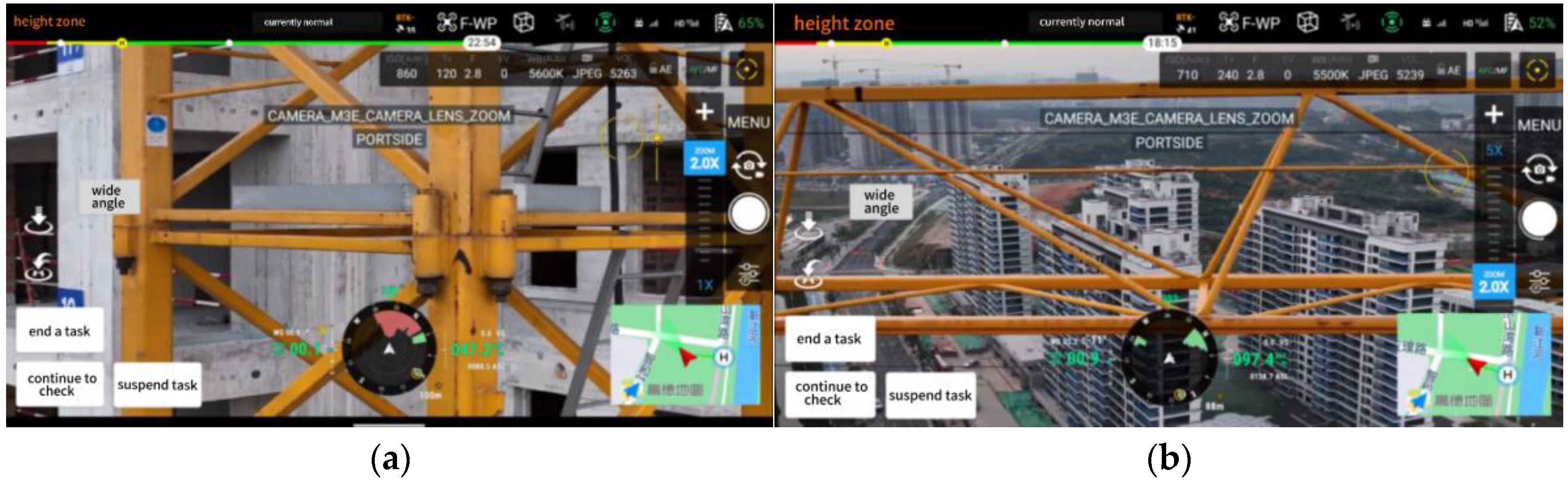
Figure 10.
Photos of typical tower crane flaws taken by UAV.

Figure 11.
UAV inspection field test results.

Figure 12.
Coverage rates correspond to each hazard level.

Figure 13.
Time consumption of UAV intelligent inspection.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The inspection items for tower cranes based on UAVs.
| No. | Inspection Site | Check Item |
|---|---|---|
| 1 | Standard section | Structure, connecting pin, cotter pin, connecting bolt, pin, crawling ladder, resting platform |
| 2 | Slewing bearing | Structure, swing stop, turn the big tooth ring, rotary machine, speed reducer, operating platform, rotating tower, turn the connecting bolts of the upper and lower supports |
| 3 | Tower crane lifting frame sets | Guide pulley, structure, hydraulic cylinder, jacking beam, introduction platform/introduction beam (introduction car), dysprosium lamp, operating platform and railings |
| 4 | Cargo boom | Cargo boom, wire rope, main wire rope, pulley, dowel, bolt, amplitude limiter, brake device, amplitude changing machine, retarder, front and rear pull rod |
| 5 | Balance arm | Balance arm, wire rope, lifting mechanism, winch, counterweight, front and rear pull rod |
| 6 | Hook and sling | Lifting hook, connecting pin, connecting bolt, rigging |
| 7 | Wall attachment device | Wall frame, attached wall pole, attached wall ear plate, structure, connecting pin, connecting bolt, cotter pin, pin, adjusting screw |
| 8 | Tower head/tower cap | Tower head, moment limiter, weight limiter, structure, operating platform, tower top |
| 9 | Cabin | Operating handle, linkage station, cab, seat, anemometer |
| 10 | Cable | Cable |
| 11 | Platform guard | Guardrail, platform, passage |
| 12 | Trolley main engine | Amplitude limiter, amplitude dolly, wire rope, wire rope anti-trip protection device, broken rope/broken shaft protection, bolts to hold the winch |
| 13 | Cotter pin and lubrication maintenance | Cotter pin, wire rope, each mechanism reducer, slewing bearing |
Table 2.
Equipment parameters of the DJI Mavic 3E.
| Information | Parameter |
|---|---|
| Max wind speed resistance | 12 m/s |
| Max takeoff altitude | 6000 m (Fly with no load) |
| The field of view (FOV) | Forward: Horizontal 90°, Vertical 103° Backward: Horizontal 90°, Vertical 103° Lateral: Horizontal 90°, Vertical 85° Upward: Front and Back 100°, Left and Right 90° Downward: Front and Back 130°, Left and Right 160° |
| Max hovering time (no wind) | 38 min |
| Horizontal hovering accuracy range (no wind) | ±0.3 m (with Vision Positioning), ±0.5 m (with GNSS Positioning), ±0.1 m (with RTK Positioning) |
| Vertical hovering accuracy range (no wind) | ±0.1 m (with Vision Positioning), ±0.5 m (with GNSS Positioning), ±0.1 m (with RTK Positioning) |
| Single-cell battery inspection time | 45 min |
Table 3.
UAV inspection hazard coverage.
| Hazard Level | Complete Inspection of Hidden Danger Items by UAV | Partial Inspection of Hidden Danger Items by UAV | Unable to Inspect Hidden Danger Items by UAV |
|---|---|---|---|
| A | 76.3% | 19.1% | 4.6% |
| B | 64.8% | 27.2% | 8.0% |
| C | 76.2% | 19.0% | 4.8% |
| T | 71.8% | 22.3% | 6.0% |
Note: A: major hidden dangers, B: important hidden dangers, C: general hidden dangers, T: all hidden dangers.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Jiao, X.; Wu, N.; Zhang, X.; Fan, J.; Cai, Z.; Wang, Y.; Zhou, Z. Enhancing Tower Crane Safety: A UAV-Based Intelligent Inspection Approach. Buildings 2024, 14, 1420. https://doi.org/10.3390/buildings14051420
AMA Style
Jiao X, Wu N, Zhang X, Fan J, Cai Z, Wang Y, Zhou Z. Enhancing Tower Crane Safety: A UAV-Based Intelligent Inspection Approach. Buildings. 2024; 14(5):1420. https://doi.org/10.3390/buildings14051420
Chicago/Turabian StyleJiao, Xin, Na Wu, Xin Zhang, Jian Fan, Zhenwei Cai, Ying Wang, and Zhenglong Zhou. 2024. "Enhancing Tower Crane Safety: A UAV-Based Intelligent Inspection Approach" Buildings 14, no. 5: 1420. https://doi.org/10.3390/buildings14051420
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.