It is known that the positioning accuracy of GNSS is directly related to the satellite pseudo range accuracy. Since pseudo range is calculated from the code phase measurement, the code phase measuring accuracy of open loop tracking is concerned in this section. Firstly, we study the code phase measurement errors of open loop tracking with different code search grid sizes and the equivalent weight pseudo range error (EWPRE) is proposed to obtain the optimal grid size. Then, the code phase measuring error of different measurement calculation methods are assessed and compared with each other. Finally, based on the analysis, the adaptive correlation space adjusted open loop tracking Algorithm (ACSA-OLTA) is proposed to improve the pseudo range measuring accuracy. Since carrier frequency is much larger than code rate, the effect of carrier Doppler frequency error on the code phase measurement accuracy is little. Moreover, considering the carrier Doppler frequency estimation error is really small, it is ignored and assumed to be zero in the following.
3.1. The Optimal Correlation Space Based on EWPRE
Based on the generalized open-loop signal tracking method described earlier, the accuracy of the code phase measurement heavily relies on the code search grid size. If the grid size is too large, the uncertainty in the grid will distort the accuracy. On the contrary, if the grid size is too small, the accuracy may be greatly destroyed by the false peak detection. Since the length of the PRN code chip in distance is really large such as GPS L1CA signal whose code chip is as long as 300 m, the grid size should be much smaller than the code chip duration to guarantee the accuracy. If the peak with the most accurate measurement is called most accurate peak, the correlation outputs beside the most accurate peak contain partial signal power. Thus, the powers of these correlation outputs are easier to be larger than the most accurate peak and false peak detection will probably occur. It is obvious that the smaller the grid is, the more signal power the adjacent grids contains and the more likely the false detection occurs.
Therefore, the balance between the accuracy degradation induced by the uncertainty in the grid and false peak detection should be gained in the choice of the code search grid size. In order to obtain the optimal search grid size for the code phase measurement accuracy improvement, we propose the equivalent weight pseudo range error (EWPRE) to evaluate the measurement error and gain the balance. Both the errors brought by the uncertainty in the grid and false peak detection are involved so as to synthesize the effects of the two factors on the measurement accuracy.
In the design of EWPRE, we firstly evaluate the code phase measurement errors when the most accurate peak or false peak is detected. For the measurements that are directly extracted from the parameters of the search grid, as it is a biased estimation with the jitter limited within the grid, the mean error is utilized for the error assessment. When the most accurate peak in the signal image is detected, the code phase measurement error is derived from the uncertainty of the real code phase in the search grid. In this case, the real signal code phase obeys the uniform distribution in the search grid expressed as below [
25]
Thus, the mean measurement error is
According to the equation, it is clear that, when the most accurate peak is detected, the measurement error is proportional to the grid size and wide search grid will induce large code phase measuring error.
When the false peak is detected, besides the error induced by the uncertainty in the search grid, the deviation of the search grid against that with the most accurate measurement is involved in the measuring error. If the
grid relative to the grid with the most accurate measurement is falsely detected, the mean measurement error is
It is obvious that the measurement error brought by false peak detection is much larger than that in the grid. Hereafter, we will develop the weight coefficients of the measurement errors when the most accurate peak or false peak is detected in the EWPRE. In order to synthetically evaluate the effects of the two kinds of errors on the measurement, the weight coefficients should be the probability that the errors occur. Usually, in open loop tracking, the peak with the largest power is regarded as the most accurate peak and the measurement will be extracted from the grid of that peak. Although prior information has been used to judge whether the peak is the most accurate one, it cannot distinguish the false peak whose corresponding code search grid is close to the most accurate peak since measurements extracted from these grids are all probable. Only power can be utilized and false detection will occur when the correlated power of the adjacent grids is larger than the most accurate peak. Therefore, the probability that the error occurs is that the false peak has power larger than the most accurate peak.
Based on the detection variable expressed in Equation (9), the correlation outputs of two grids in code dimension with the same Doppler frequency are considered. One of them is the most accurate peak, the other one is the false peak. There are two situations for the probability calculation. When the space between the girds of the two peaks in code dimension is larger than one code chip, the correlated powers of the most accurate peak and the false peak are independent from each other and only the most accurate peak contains signal power. If
and
are the correlated power of the most accurate peak and the false peak, according to Equation (9),
obeys non-central
(chi-square) distribution with two degrees of freedom and
obeys central
distribution with two degrees of freedom. The probability density functions (PDF) of them are
where α is the non-central parameter and it is equal to
which is the energy of the most accurate peak.
is the zero-order modified Bessel function of the first kind [
26]. The joint PDF is
The probability false detection occurs is that when
and it is expressed as
When the space between the girds of the most accurate peak and the false peak in code dimension is smaller than one code chip,
and
are not independent from each other and both of them contain signal power. Let
and
be the in-phase and quadrature branch correlation outputs of the most accurate peak and
and
be the in-phase and quadrature branch correlation outputs of the false peak, supposing the Doppler frequency error is zero, their expressions are as below according to Equations (6) and (7)
where
is the code phase space between the two peaks and
.
and
are the carrier phase residuals.
,
,
and
are the noise components. They are AWGN and the variances of them are all
according to Equation (8). Because of the orthogonal carrier phase relationship,
and
are independent of
and
. The covariance between
and
is
The covariance between
and
is
Thus,
,
,
and
are all Gaussian random variables. According to the definition of the variables
, the covariance matrix
is given by
Supposing
, the joint PDF is
where
and it is the mean value vector of
. By computing the inverse matrix of
, the expression of the joint PDF is
Submitting
,
,
and
into Equation (26), after some algebra manipulations, the expression of the joint PDF of
and
is
When
varies from 0 to 1 chip, the probability that false detection occurs is
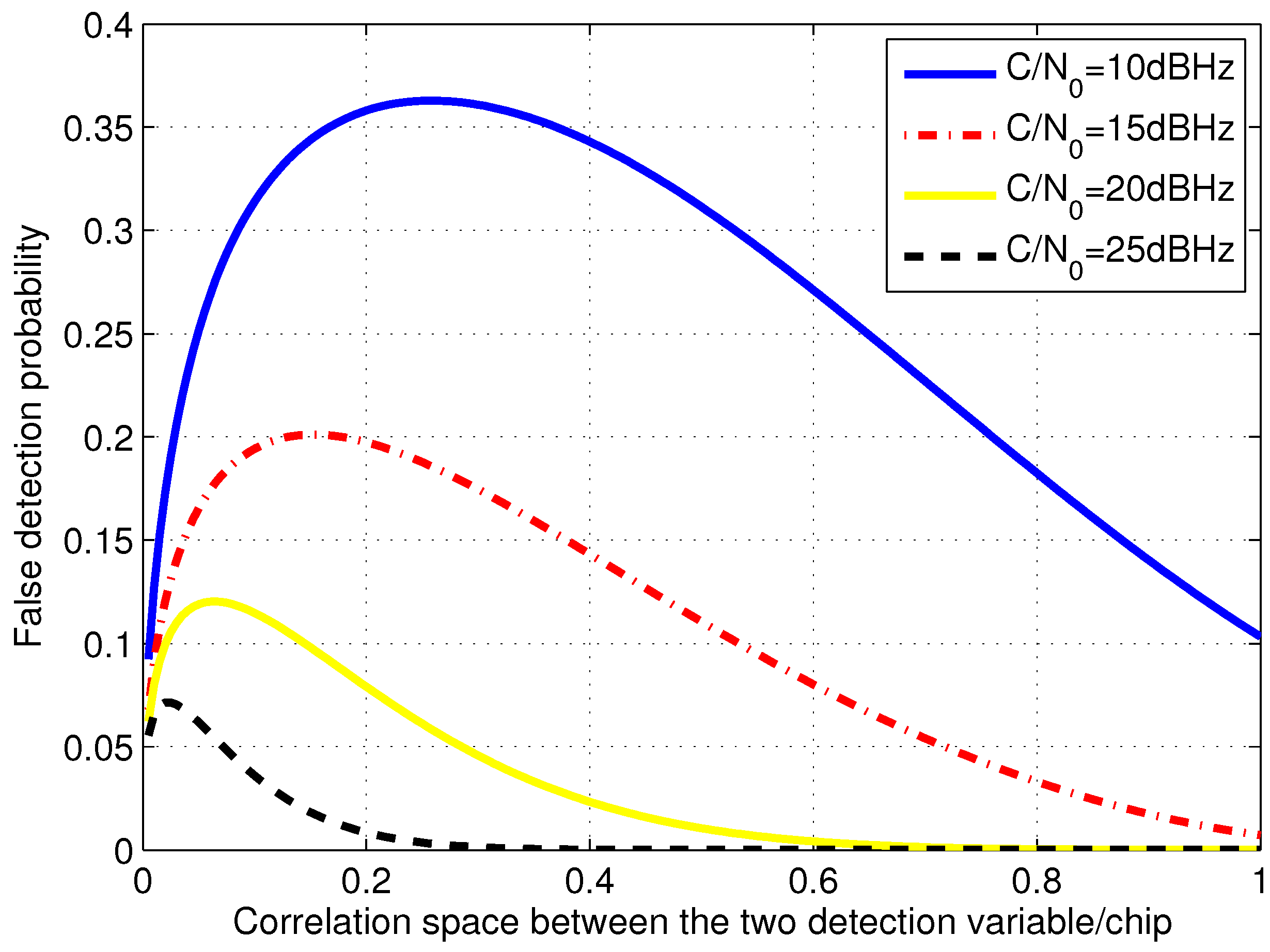
Taking the coherent integration length of 300 ms as an example, the false detection probability for different
and different carrier-to-noise density ratio (
) is shown in
Figure 2. It is obvious the false peak detection probability is related to the space between the most accurate peak and the false peak. Since more signal power is contained in the false peak when the space is small, the probability increases as the space between the two peaks decreases. While, when the space is too small, the probability become lower because of the significant positive correlation between the powers of the two peaks according to Equations (22) and (23). Hence, when the grid size is small, the false peak detection will probably occur especially at the point with the largest false detection probability. However, large grid size contains large inherent measurement error. In addition, when the correlation space exceeds 1 code chip, the false peak detection probability is extremely small with respect to those within the code chip duration so that it is not considered in the following analysis. In consideration that open-loop tracking extracts code phase measurement from that of the grid where the detected peak is, the results further validate that the search grids with the size too large or two small will both degrades the measurement accuracy.
Figure 2.
False detection probability of different correlation space and .
Figure 2.
False detection probability of different correlation space and .
Furthermore, it also shows that the false detection probability becomes high as () decreases. When is high, the most accurate peak with the maximum signal power is easily detected from the false peak. While, when is low, both the two peaks are greatly disturbed by noise so that they are difficult to be distinguished and false detection will probably occur. In addition, the code phase spaces with the largest false detection probability are various among different due to the positive correlation between the two peaks besides the signal power. The lower the is, the larger the corresponding space with the highest false detection probability is. Therefore, the signal power should be considered in the choice of code search grid size.
Considering that the false peak detection probabilities can indicate the possibility of the occurrence of the measurement errors induced by the false detection at different points, the weight coefficients are designed based on the probability. The weight coefficient for the
grid relative to grid with the most accurate measurement is expressed as below
where
corresponds to the grid with the most accurate measurement.
is the code chip duration. The weighed coefficients are the integration of the probability that the detection result is in the false grid or in the right grid. Accordingly, it evaluates the likelihood of the measurement errors corresponding to the detection of the correct or false peak. Based on the weight coefficients, the EWPRE is
It is the weighed sum of the code phase measurement errors when the detection results vary from the grid of the most accurate peak to that one code chip away. The measurement error induced by the false detection in other grids and that when the most accurate peak is detected are both involved and weighed to accumulate together. With the help of the weight coefficients, when the false detection probability is large, the measurement error induced by the false peak detection will be dominant in the weighted error. On the contrary, the measurement error within the grid will be more significant. As a result, it synthesizes the effects of the uncertainty in the search grid and false peak detection on the code phase measurement accuracy. The value of EWPRE represents the mean equivalent relative measurement error among different grid sizes so that it can evaluate the measurement accuracy difference of these grid sizes even though it is not the estimation of the real mean measurement error. It is further verified by simulation in
Section 4.1.
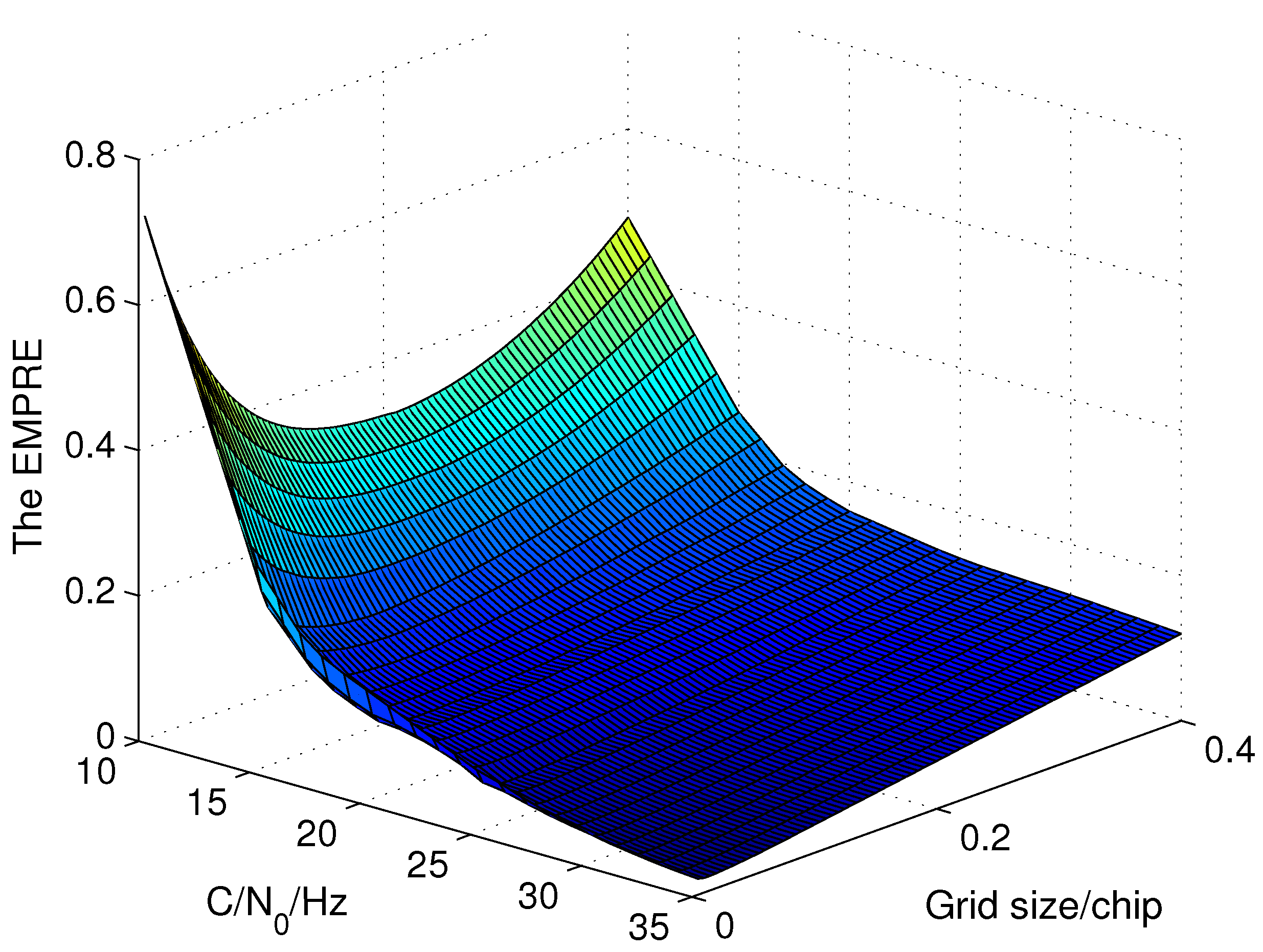
Consequently, the optimal code search grid size of open loop tracking method for a given
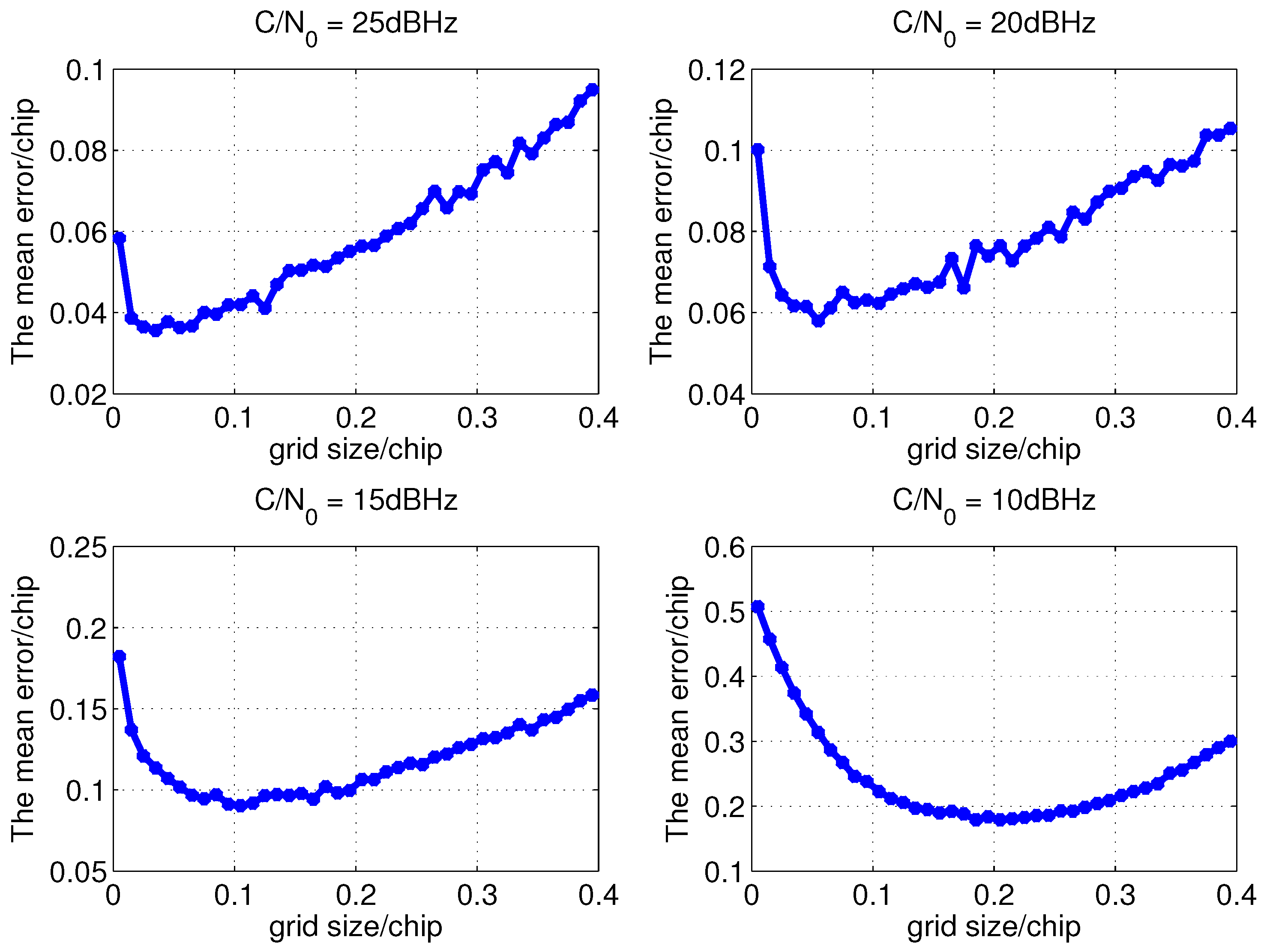
is the one with the minimum EWPRE. After some algebraic transformation, the EWPRE is simplified as below. When the coherent integration length is 300 ms, the EWPRE of different grid sizes for different
is shown in
Figure 3.
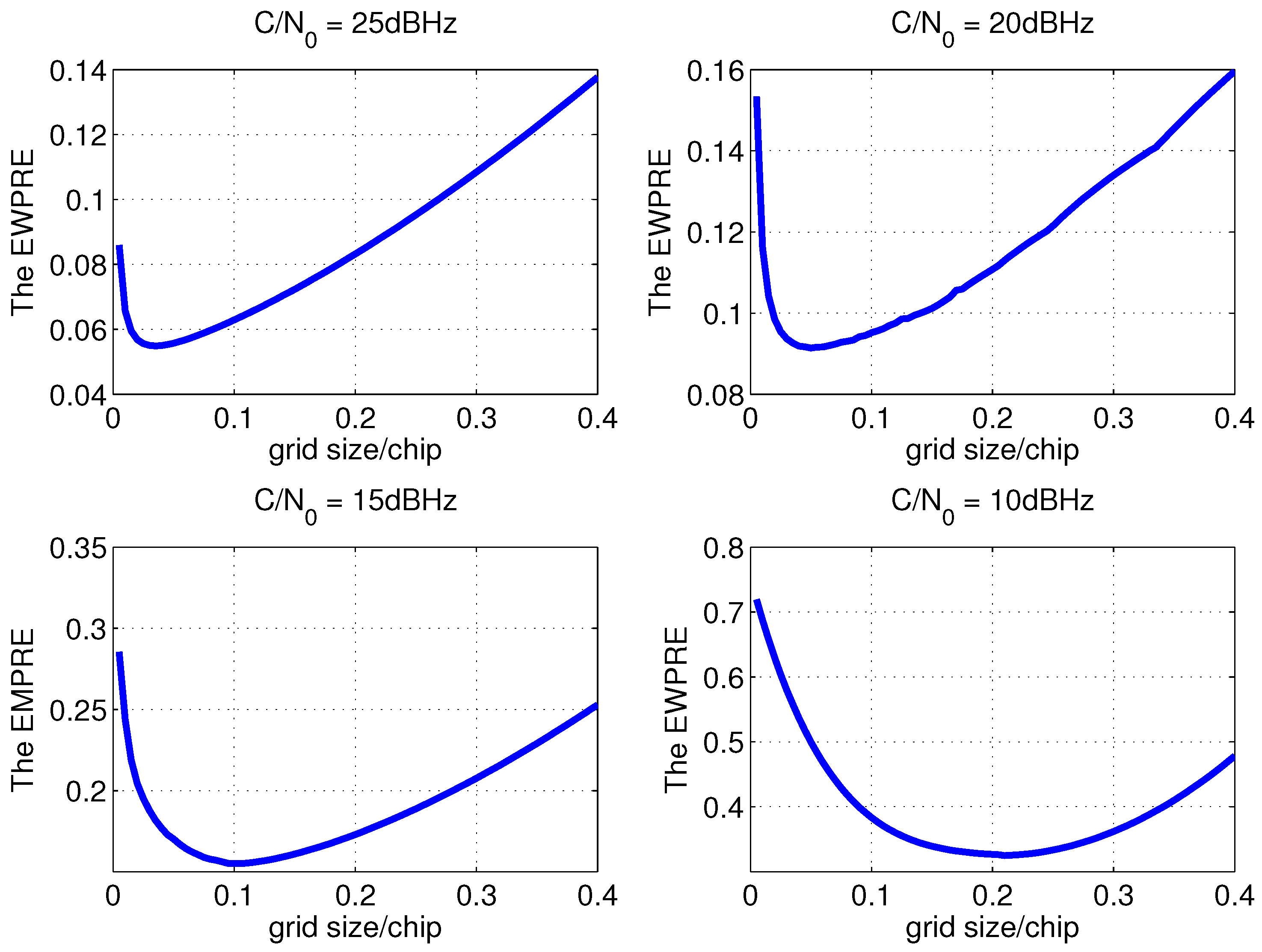
Taking the
of 10 dBHz, 15 dBHz, 20 dBHz and 25 dBHz as examples, the EWPRE of different grid sizes is detailedly drawn in
Figure 4.
Figure 3.
The EWPRE of different grid sizes and with 300 ms coherent integration.
Figure 3.
The EWPRE of different grid sizes and with 300 ms coherent integration.
Figure 4.
The detailed EWPRE of different grid size with 300 ms coherent integration.
Figure 4.
The detailed EWPRE of different grid size with 300 ms coherent integration.
One can see that there is a grid size that minimizes the EWPRE for each
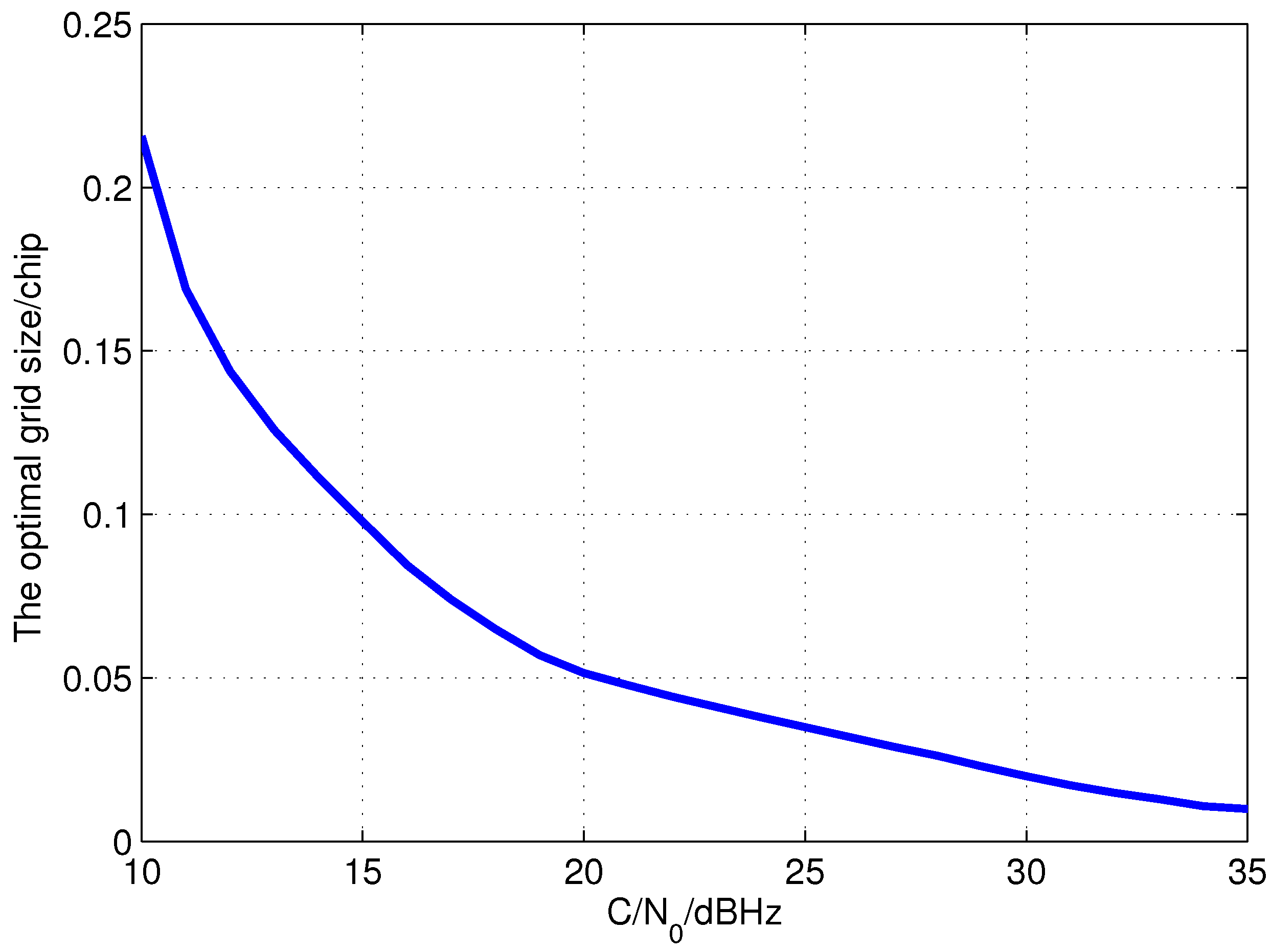
and that shall be the grid size with best accuracy. Taking the coherent integration length of 300 ms as an example, the optimal code search grid sizes of different
are shown in
Figure 5. It indicates that when
is low, the grid size is enlarged to increase the power difference between adjacent grids so as to avoid the error brought by the false peak detection which is much more serious than the error within the grid. When the
is high, as the detection performance is perfect, the optimal grid size is really small to reduce the measurement error in the grid. Therefore, the correlation space between the batch correlators of open loop tracking which is the code search grid size should be adjusted to the optimal size shown in
Figure 5 as
varies to improve the measurement accuracy. Considering small grid size demands large numbers of correlators which means huge computational costs, the method to calculate the measurement with less correlators but high accuracy is studied in the next subsection. The verification of the optimal grid size is conducted in
Section 4 with the help of Monte Carlo simulation and test.
Figure 5.
Optimal code search grid size of different with 300 ms coherent integration.
Figure 5.
Optimal code search grid size of different with 300 ms coherent integration.
3.2. The Measurement Calculation Strategy
In order to reduce the correlators needed and keep the accuracy at the same time, early-minus-late discriminator (EMLD) is introduced [
8]. However, no previous study has analyzed the accuracy of the method. In this section, the accuracy of the measurement derived from the discriminator is evaluated. Based on the accuracy comparison between the code phase calculated with the EMLD method and that directly extracted from the local reference signal of the detected grid, together with the computational cost assessment results, the measurement calculation strategy is developed.
The EMLD based code phase estimation begins after the peak detection. The correlation outputs of the two code search grids adjoining the peak are used to construct the discriminator. If the two grids are represented by
E and
L corresponding to that with the code phase earlier or later than the peak respectively, the in-phase and quadrature correlation outputs of the two grids are expressed as below
where
,
,
and
are the noise components in the correlation results.
k is the grid index of the detected peak. The final code phase estimation result
is
In this way, regardless of the noise, the discriminator can completely compensate the uncertainty of the code phase in the detected grid [
8]. If the most accurate peak is detected, the code phase estimation is totally unbiased. However, noise will distort the code phase measurement so that the error standard deviation is utilized for the evaluation. Assuming that it is perfectly normalized discriminator and the front-end bandwidth is infinite, the variance of the measurement calculated from the discriminator is as below (details of derivation are shown in the
appendix)
At the same time, for the code phase that directly extracted from the grid parameters, when the most accurate peak is detected, the variance of the measurement is
In the following, we use the abbreviations below to represent the open loop tracking with the two different code phase measurement calculation methods.
- -
DIS: The open-loop tracking with EMLD dependent code phase estimation method
- -
DET: The open-loop tracking that directly calculate the code phase from the grid parameters.
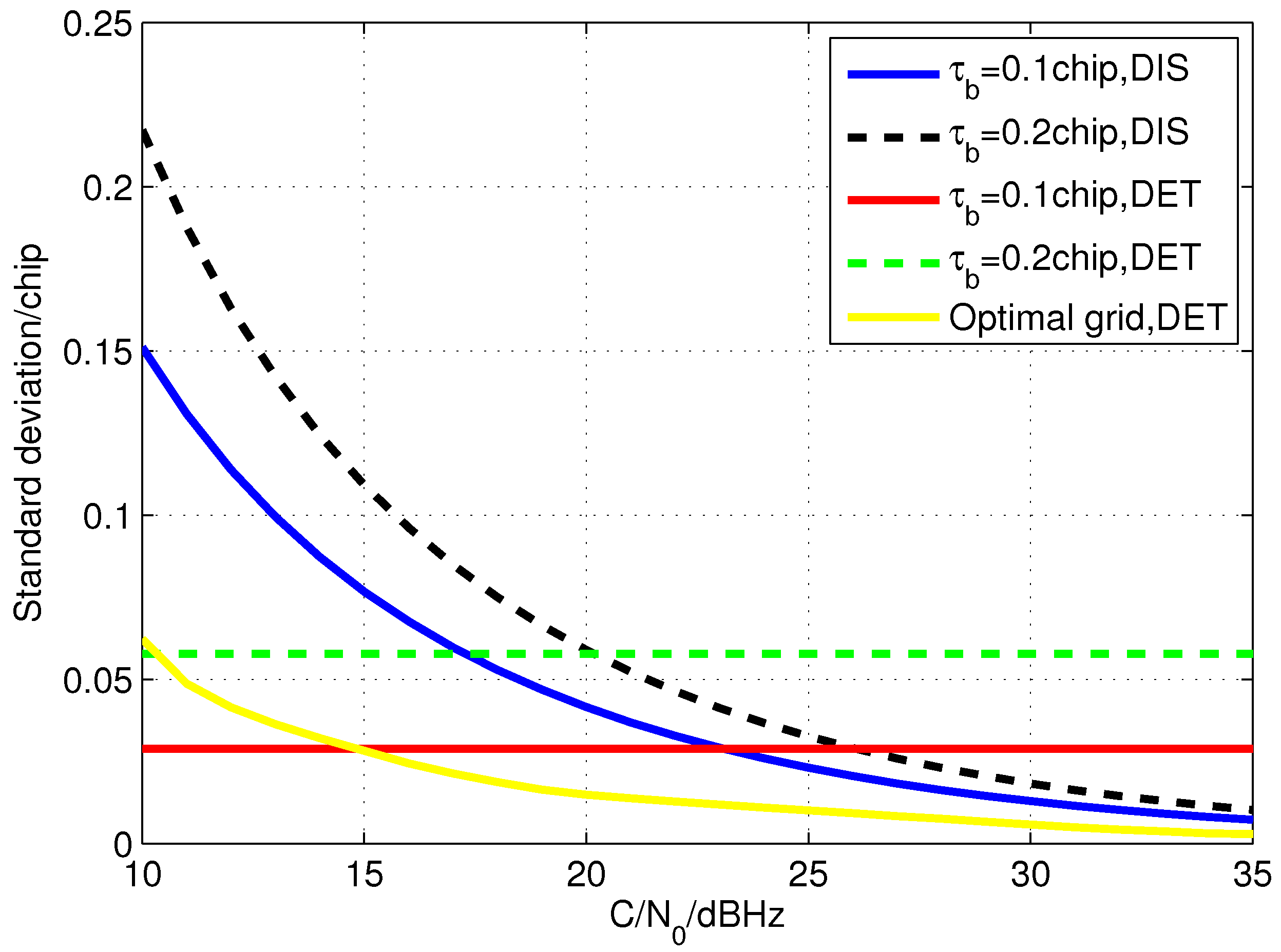
Assuming that the peak detection is correct, the error standard deviations of measurements calculated by DIS and DET with different grid sizes are drawn in
Figure 6 in which the coherent integration length is 300 ms. It shows that, when
is high, the accuracy of DIS is much better than that of DET with the same grid size. Furthermore, although the accuracy of DET with optimal grid size is better than the discriminator based method with the grid size of 0.1 chip when
is high, the improvement is a little and it needs a huge number of correlators. However, as the
decreases, the accuracy of DIS is destroyed and it becomes worse than DET. Moreover, if false peak detection occurs, the accuracy of DIS will be further distorted. Thus, the EMLD method cannot be utilized all the time as that in [
19] and a
threshold is needed to switch the code phase calculation methods.
Taking the coherent integration length of 300 ms as an example, if the
of DIS is 0.1 chip and DET has the optimal grid size shown in
Figure 5, when
is larger than 23 dBHz which is the standard deviation cross point of the measurements derived from the two methods, the correlators needed to search the area of 1 chip and the corresponding measurement error standard deviation are listed in
Table 1.
Figure 6.
The code phase error standard deviation of the two measurement calculation methods without consideration of false peak detection.
Figure 6.
The code phase error standard deviation of the two measurement calculation methods without consideration of false peak detection.
Table 1.
The statistic of the correlator needed and the mean accuracy.
Table 1.
The statistic of the correlator needed and the mean accuracy.
| (dBHz) | 23 | 24 | 25 | 26 | 27 | 28 | 29 | 30 |
|---|
| DET | correlator number | 24.3 | 26.2 | 28.5 | 30.9 | 34.7 | 38.6 | 44.0 | 50.3 |
| standard deviation (chip) | 0.0119 | 0.0110 | 0.0101 | 0.0094 | 0.0083 | 0.0075 | 0.0066 | 0.0057 |
| DIS | correlator number | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 |
| standard deviation (chip) | 0.0292 | 0.0260 | 0.0231 | 0.0206 | 0.0183 | 0.0163 | 0.0145 | 0.0129 |
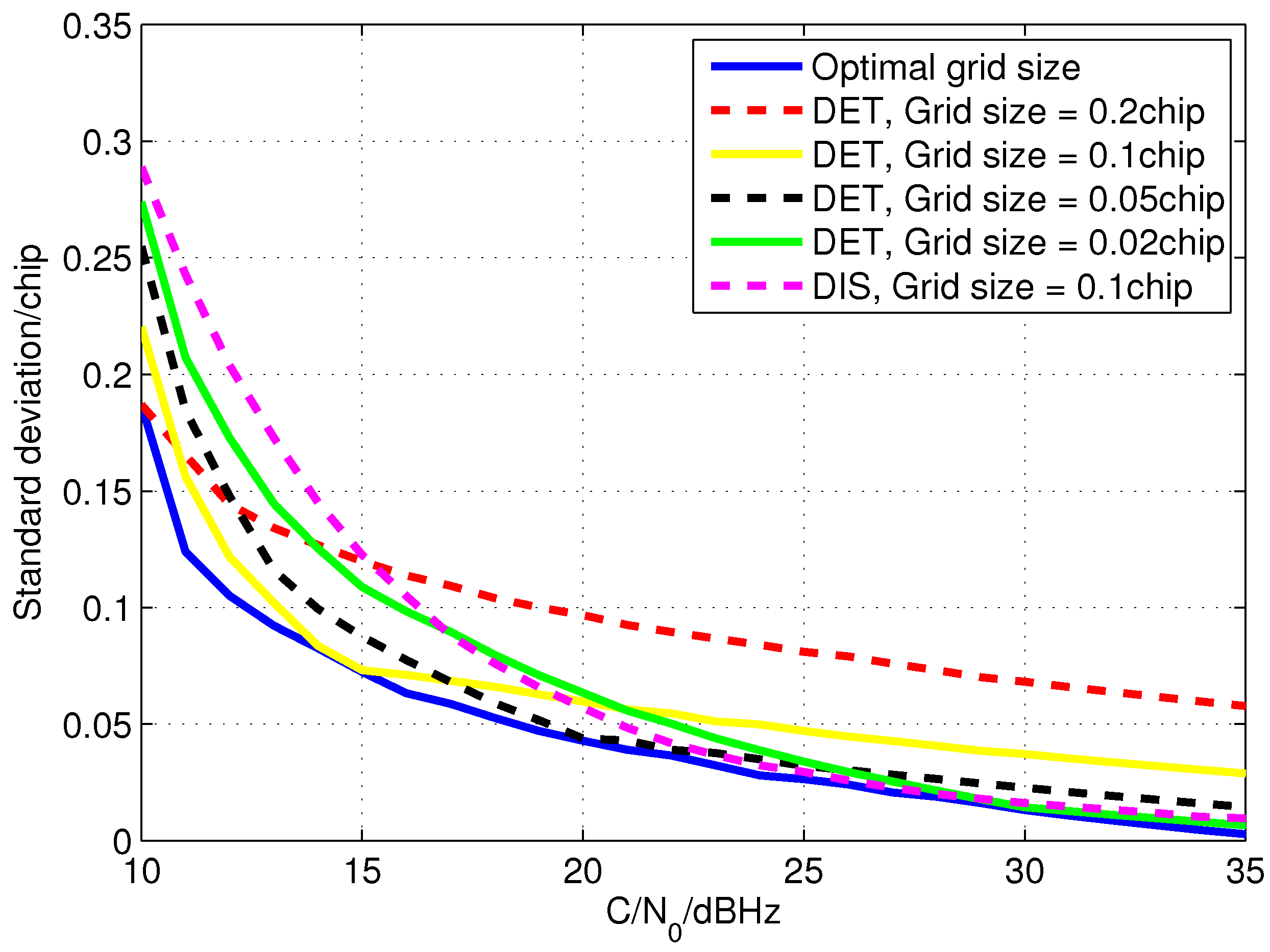
In the table, the measurement accuracy is calculated under the assumption that the peak detection is correct. Since the optimal grid size is smaller than 0.1 chip when
is larger than 23 dBHz, the false peak detection probability of the open loop with the optimal grid size is a little larger than that with the grid size of 0.1 chip so that the code phase measuring error is more coincident. As a result, the measurement accuracy of DET and DIS in these cases are more or less the same which is further verified in
Section 4.1. In consideration that DIS can hugely decrease the correlators needed, it is preferred when
is high. When
reduces, the measurement accuracy of DIS is quickly decreased due to the noise and it is much poorer than the DET with the optimal grid size. For the more, as
decreases, with the grid size of 0.1 chip, the false detection probability become large and the accuracy will be further distorted. In fact, when
is lower than 23 dBHz, the measurement accuracy of DIS will quickly degrade which is validated by the simulation results in
Section 4.1. Therefore, we propose the measurement calculation strategy that switches the two code phase calculation methods at the
of 23 dBHz, namely the standard deviation cross point of the measurements computed with the two methods. In the strategy, when
is higher than 23 dBHz, the discriminator is used and the grid size is 0.1 chip. When
is lower than 23 dBHz, measurement is calculated directly based on the parameters of grid with the optimal size.
3.3. Adaptive Correlation Space Adjusted Method
In view of the analysis above, the optimal code search grid size is different when the received signal power varies. For the purposes to improve the code phase measurement accuracy of open loop tracking in urban area, the adaptive correlation space adjusted open loop tracking approach (ACSA-OLTA) is proposed. In ACSA-OLTA, the correlation space between the batch correlators is adjusted to the optimal code search grid size calculated from the EWPRE according to
which displays the signal power [
20]. The EMLD based measurement calculation method is utilized at the proper
to further improve the accuracy and reduce the number of correlator needed at the same time. In addition, the search grid size in frequency dimension is set to a fixed value. When the grid size in code dimension varies according to the
, the size in frequency dimension is unchanged. The Doppler frequency measuring result of the satellite signal is that of the local reference signal of the detected grid.
Taking the coherent integration of 300 ms as an example, the search grid size in frequency dimension is 5 Hz. The code search grid sizes for different
are set as those shown in
Figure 5. The process of the method is summarized as below
- Step
1: Initialize the code search grid size as 0.2 chip, Doppler frequency grid size as 5 Hz. Then, carry out the coherent integration in the batch correlators.
- Step
2: After the coherent integration, detect the signal in the image of the correlator outputs. Estimate the of the incoming signal with the help of the correlation result of the detected peak.
- Step
3: Adjust the correlation space between adjacent correlators according to the estimated
. When
is larger than 23 dBHz, it is set to 0.1 chip. Or else, it is set as
Figure 5. The signal code phase and Doppler frequency are directly extracted from the grid and fed back to the local signal generators.
- Step
4: Correlate the incoming signal with the new local replicas to form the signal image.
- Step
5: After removing the multipath peaks and other improper peaks according to the prior information, the peak with the maximum power in the image is selected.
- Step
6: The code phase is calculated by EMLD when is higher than 23 dBHz. Otherwise, the code phase is that of the grid. The estimated parameters are fed back to the local signal generators.
- Step
7: Estimate the
with the correlation output of the detected peak. Then, adjust the correlation space as
Figure 5 if
is lower than 23 dBHz, or else it is set to 0.1 chip. Return to Step 4.
For other proper coherent integration lengths, the process is probably the same. The only differences are the switch point of the measurement calculation methods and the optimal grid sizes. Since all of these parameters can be calculated based on the methods above, they are not detailed for simplicity.
In the method, at the beginning, the signal power is unknown and the correlation space has to be set to an empirical value. In order to keep the correctness of peak detection, the code search grid size is initialized as 0.2 chip which is relatively large. In this way, the most accurate peak can be detected easily in which most signal power is contained. The
will be perfectly estimated with the corresponding correlation outputs. As the code phase of the detected peak is always aligned with the incoming signal when the correlation space is varying, almost all signal power will be involved in the peak all the time and adjusting the space has tiny effects on
estimation. The details of
estimation have been given in [
21,
27] which can provide accurate
estimation so that it is not described here for simplicity.
With the help of the estimation, the correlation space of the batch correlators in open loop tracking is adjusted to the optimal one calculated from EWPRE. The measurement calculation methods are also changed according to the . In this way, as the satellite signal power is continuously varying in the real application area due to the sheltering, scattering, etc, the proposed ACSA-OLTA can greatly improve the code phase measurement accuracy of open loop tracking. The performance of ACSA-OLTA is evaluated by tests in the next section.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









