Ultra-Wideband Angle of Arrival Estimation Based on Angle-Dependent Antenna Transfer Function


Abstract
:1. Introduction
- that the AOA estimation method is not bound to a specific environment,
- that the method also works without reflective surfaces in the receiver antenna’s vicinity if the antenna is chosen accordingly, and
- how the proposed method can be integrated with existing time of flight (TOF)-based localization methods, with which training data can be acquired on the go.
1.1. Outline
1.2. Related Work
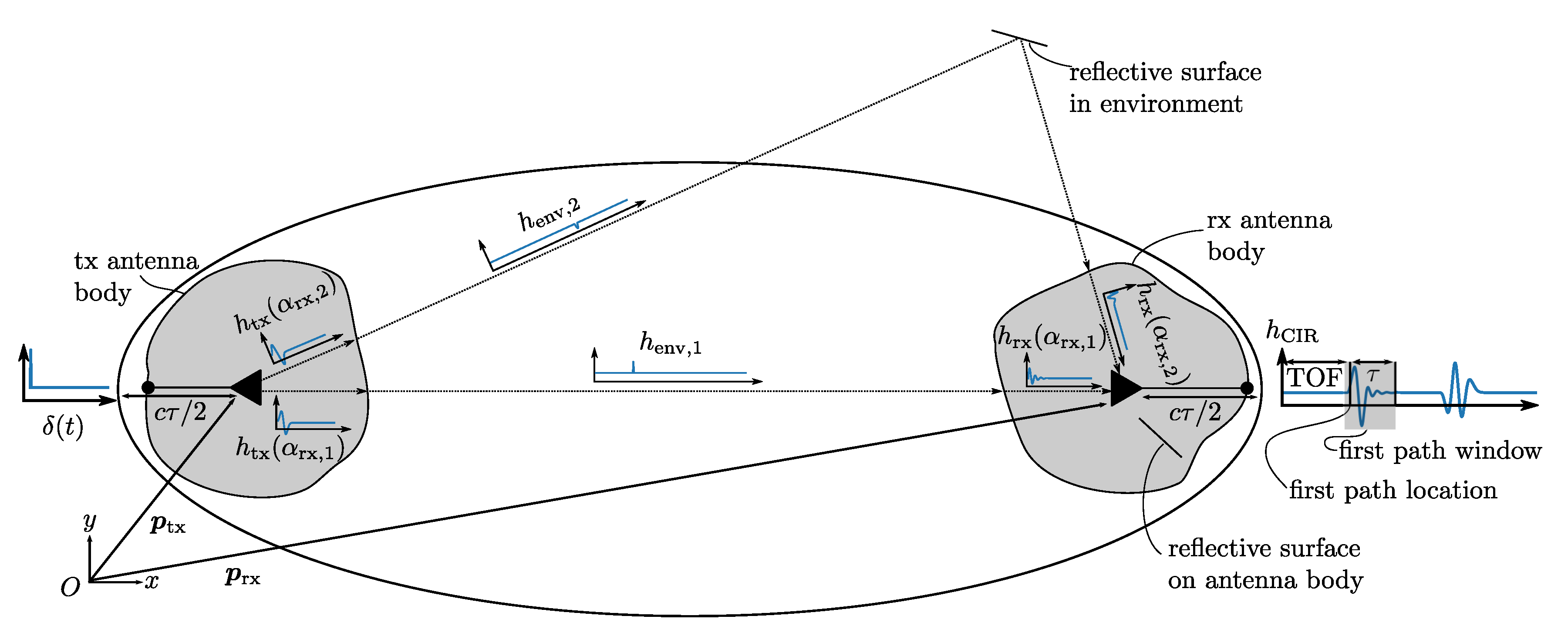
2. Channel Impulse Response
2.1. Components of the CIR
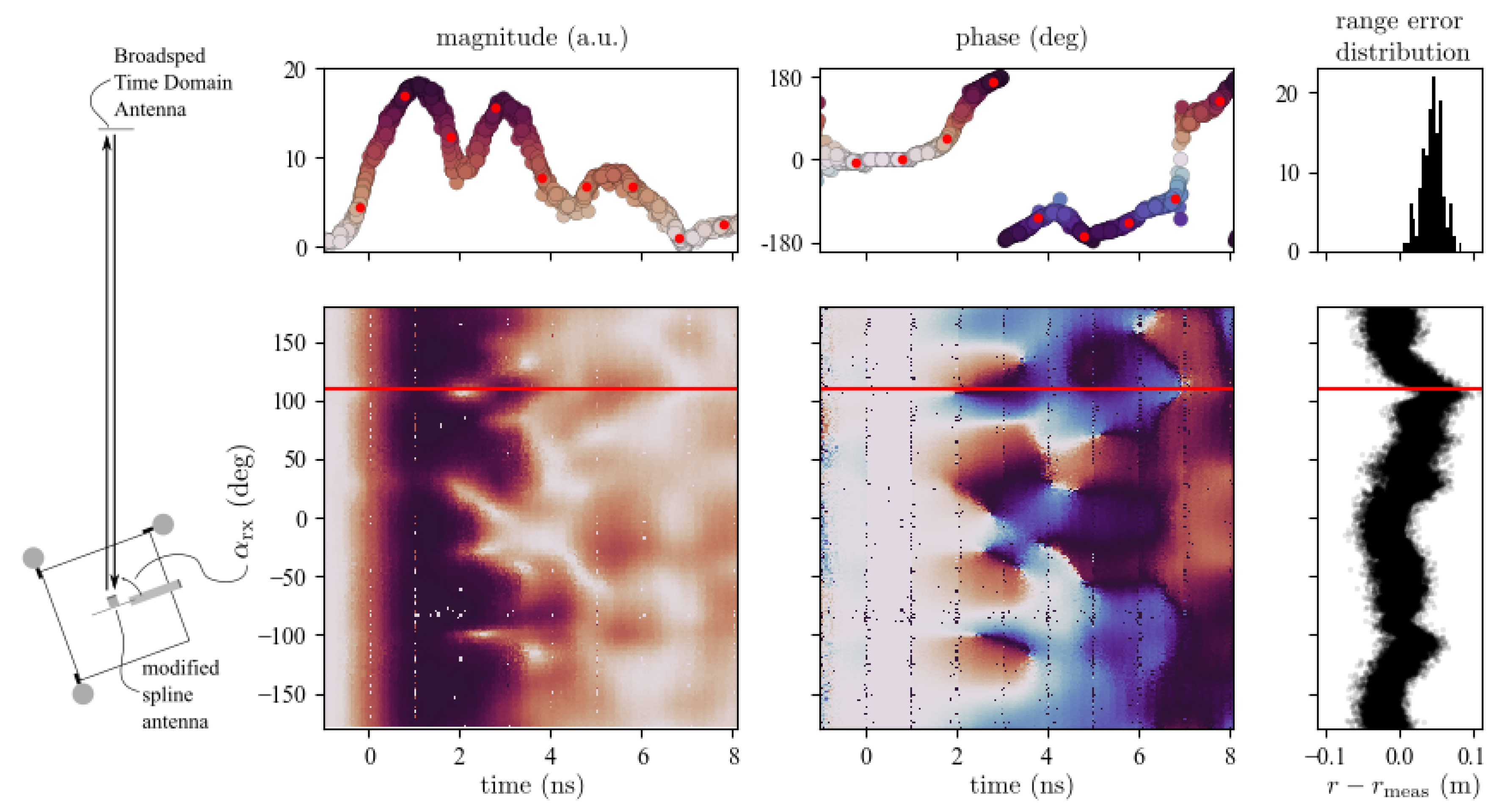
2.2. Measuring the CIR for Different AOA
3. Learning the CIR to AOA Mapping
3.1. Windowing
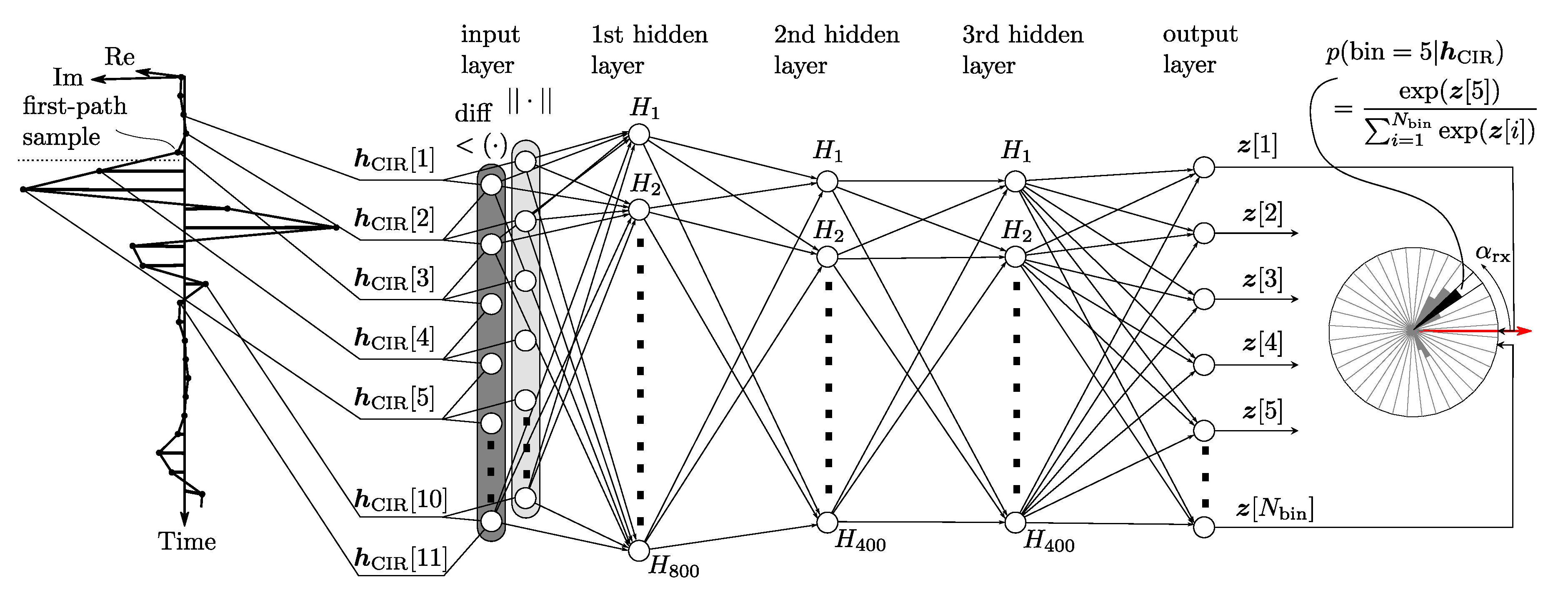
3.2. CIR to AOA Mapping
3.3. Network Structure
3.4. Network Training
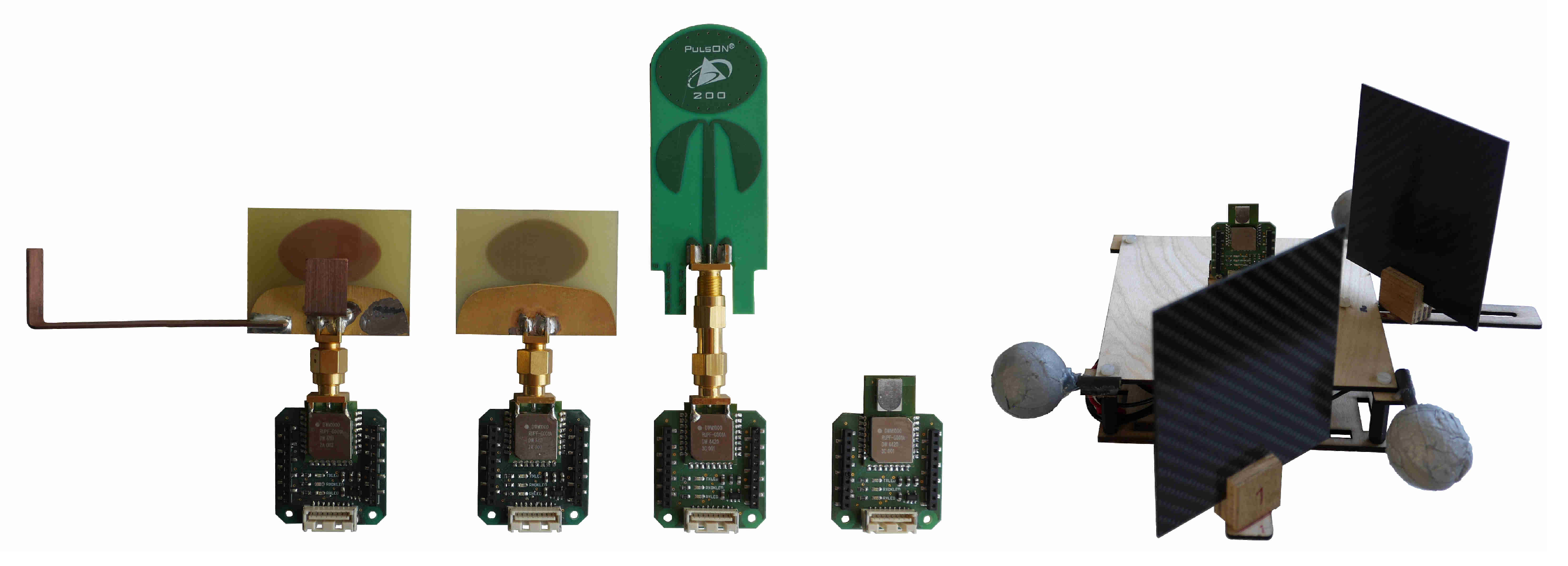
4. Acquiring the Datasets
5. Results
6. Application to a Self-Localization Problem
6.1. Self-Localization Problem
6.2. Particle Filter
6.2.1. Random Walk Process Model
6.2.2. Roomba Process Model
6.2.3. Measurement Model
6.2.4. Particle Filter Algorithm
- Initialization: The particle filter is initialized with particles whose initial x, y coordinates and headings are drawn from the uniform distributions , and .
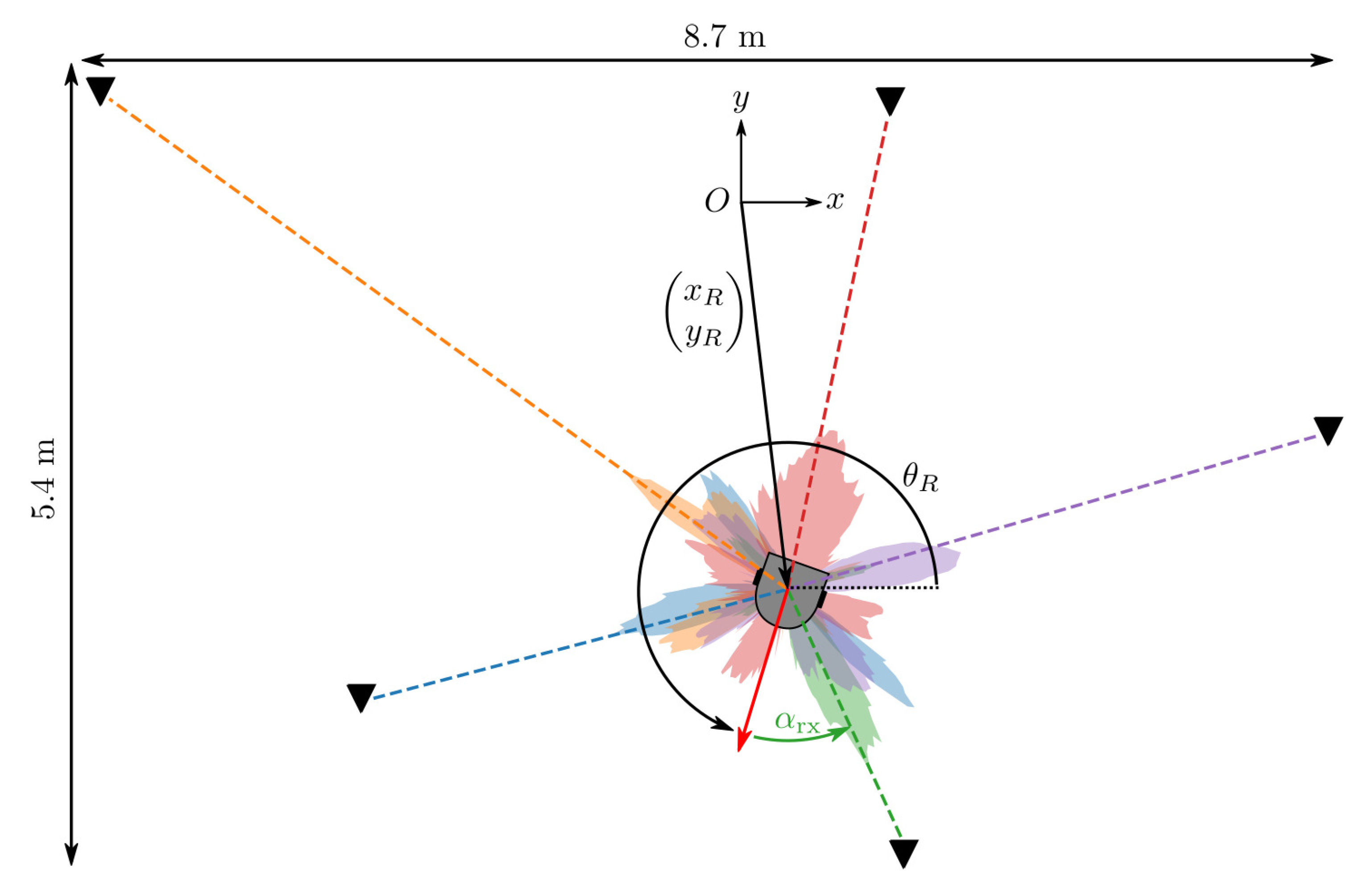
- Measurement update: When a UWB signal is received, the particle weights can be updated according to their likelihood given the current AOA a-posteriori probability distribution or the current range measurement. Using the AOA a-posteriori probability distribution, the particles weights are calculated aswhere the expected AOA of each particle p iswherein and are the x and y coordinates of the anchor modules from which a signal is received. If the range measurement is used, the particle weights are calculated aswith the measured range with a variance of , and where the expected range of each particle p is calculated asAfter the particle weights have been calculated, the particles are resampled to get posterior particles, all with equal weights.
6.3. Training with Particle Filter AOA Data
6.4. Results
7. Conclusions
Outlook
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AOA | Angle of Arrival |
| AOD | Angle of Departure |
| CIR | Channel Impulse Response |
| RMSE | Root-Mean-Square Error |
| TOF | Time of Flight |
| TOFD | Time of Flight Differences |
| UWB | Ultra-wide Band |
Appendix A. DW1000 Configuration

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel Number | 4 (Carrier Frequency 3993.6 MHz, Bandwith 900 MHz) |
| Pulse Repetition Frequency | 16 MHz |
| Data Rate | 6.8 Mbps |
| Preamble Length | 128 Symbols |
| Preamble Accumulation Size | 8 |
| Preamble Code | 7 |
| Transmit Power Control | 19 dB Gain |
Appendix B. CIR Measurements for Different Antenna Configurations

Appendix C. Results Obtained with Partron Dielectric Chip Antenna with Carbon Plates

Appendix D. Results Obtained with Particle Filter Employing Neural Networks Trained with Motion Capture Data

References
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Ledergerber, A.; D’Andrea, R. Angle of Arrival Estimation based on Channel Impulse Response Measurements. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Macau, China, 4–8 November 2019. [Google Scholar]
- Dataset to “Ultra-Wideband Angle of Arrival Estimation Based on Angle-Dependent Antenna Transfer Function”. Available online: http://hdl.handle.net/20.500.11850/366884 (accessed on 14 October 2019).
- Chandran, S. Advances in Direction-of-Arrival Estimation; Artech House: Norwood, UK, 2006. [Google Scholar]
- Dotlic, I.; Connell, A.; Ma, H.; Clancy, J.; McLaughlin, M. Angle of Arrival Estimation Using Decawave DW1000 Integrated Circuits; IEEE: Piscataway Township, NJ, USA, 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Duran, M.A.C.; D’Amico, A.A.; Dardari, D.; Rydström, M.; Sottile, F.; Ström, E.G.; Taponecco, L. Terrestrial Network-Based Positioning and Navigation. Satell. Terr. Radio Position. Tech. 2012, 75–153. [Google Scholar] [CrossRef]
- Chung, P.J.; Viberg, M.; Yu, J. Chapter 14—DOA Estimation Methods and Algorithms. In Academic Press Library in Signal Processing; Elsevier: Amsterdam, Netherlands, 2014; pp. 599–650. [Google Scholar] [CrossRef]
- Barua, S.; Lam, S.C.; Ghosa, P.; Xing, S.; Sandrasegaran, K. A survey of Direction of Arrival estimation techniques and implementation of channel estimation based on SCME. In Proceedings of the 2015 12th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Hua Hin, Thailand, 24–27 June 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Bialer, O.; Garnett, N.; Tirer, T. Performance Advantages of Deep Neural Networks for Angle of Arrival Estimation. In Proceedings of the 2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 3907–3911. [Google Scholar] [CrossRef]
- Elbir, A.M.; Mishra, K.V. Joint Antenna Selection and Hybrid Beamformer Design using Unquantized and Quantized Deep Learning Networks. arXiv 2019, arXiv:1905.03107. [Google Scholar]
- Soltanaghaei, E.; Kalyanaraman, A.; Whitehouse, K. Multipath Triangulation: Decimeter-level WiFi Localization and Orientation with a Single Unaided Receiver. In Proceedings of the 16th Annual International Conference on Mobile Systems, Applications, and Services-MobiSys ’18, Munich, Germany, 10–15 June 2018; ACM Press: Munich, Germany, 2018; pp. 376–388. [Google Scholar] [CrossRef]
- Sun, C.; Karmakar, N.C. Direction of Arrival Estimation with a Novel Single-Port Smart Antenna. EURASIP J. Adv. Signal Process. 2004, 2004, 484138. [Google Scholar] [CrossRef]
- Bole, A.; Wall, A.; Norris, A. Chapter 1—Basic Radar Principles. In Radar and ARPA Manual, 3rd ed.; Butterworth-Heinemann: Oxford, UK, 2014; pp. 1–28. [Google Scholar] [CrossRef]
- Lowrance, C.J.; Lauf, A.P. Direction of arrival estimation for robots using radio signal strength and mobility. In Proceedings of the 2016 13th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 19–20 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Quitin, F.; Govindaraj, V.; Zhong, X.; Tay, W.P. Virtual Multi-Antenna Array for Estimating the Angle-of-Arrival of a RF Transmitter. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Molisch, A.F. Ultra-Wide-Band Propagation Channels. Proc. IEEE 2009, 97, 353–371. [Google Scholar] [CrossRef]
- Munier, F.; Wessman, M.-O.; Eriksson, T.; Svensson, A. On the effect of antennas on UWB systems. In Proceedings of the 28th URSI General Assembly, New Delhi, India, 23–29 October 2005; pp. 128–137. [Google Scholar]
- Sipal, V.; John, M.; Neirynck, D.; McLaughlin, M.; Ammann, M. Advent of practical UWB localization: (R)Evolution in UWB antenna research. In Proceedings of the 8th European Conference on Antennas and Propagation (EuCAP 2014), The Hague, The Netherlands, 6–11 April 2014; pp. 1561–1565. [Google Scholar] [CrossRef]
- Muqaibel, A.; Safaai-Jazi, A.; Woerner, B.; Riad, S. UWB channel impulse response characterization using deconvolution techniques. In Proceedings of the 2002 45th Midwest Symposium on Circuits and Systems, 2002—MWSCAS-2002, Tulsa, OK, USA, 4–7 August 2002; Volume 3, p. III-605. [Google Scholar] [CrossRef]
- Dumoulin, A. A study of integrated UWB antennas optimised for time domain performance. Doctoral Thesis, Dublin Institute of Technology, Dublin, Irland, 2012. [Google Scholar] [CrossRef]
- Cicchetti, R.; Miozzi, E.; Testa, O. Wideband and UWB Antennas for Wireless Applications: A Comprehensive Review. Int. J. Antennas Propag. 2017. [Google Scholar] [CrossRef]
- Tiemann, J.; Pillmann, J.; Wietfeld, C. Ultra-Wideband Antenna-Induced Error Prediction Using Deep Learning on Channel Response Data. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Ledergerber, A.; D’Andrea, R. Calibrating Away Inaccuracies in Ultra Wideband Range Measurements: A Maximum Likelihood Approach. IEEE Access 2018, 6, 78719–78730. [Google Scholar] [CrossRef]
- Mohammadian, A.H.; Rajkotia, A.; Soliman, S.S. Characterization of UWB transmit-receive antenna system. In Proceedings of the IEEE Conference on Ultra Wideband Systems and Technologies, Reston, VA, USA, 16–19 November 2003; pp. 157–161. [Google Scholar] [CrossRef]
- Sachs, J. Handbook of Ultra-Wideband Short-Range Sensing: Theory, Sensors, Applications; Wiley-VCH: Weinheim, Germany, 2012. [Google Scholar]
- DW1000 Datasheet. Available online: https://www.decawave.com (accessed on 14 October 2019).
- Mueller, M.W.; Hamer, M.; D’Andrea, R. Fusing ultra-wideband range measurements with accelerometers and rate gyroscopes for quadrocopter state estimation. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 1730–1736. [Google Scholar] [CrossRef]
- Schantz, H.G. Bottom fed planar elliptical UWB antennas. In Proceedings of the IEEE Conference on Ultra Wideband Systems and Technologies, Reston, VA, USA, 16–19 November 2003; pp. 219–223. [Google Scholar] [CrossRef]
- DWM1000 Datasheet. Available online: https://www.decawave.com (accessed on 14 October 2019).
- DW1000 User Manual. Available online: https://www.decawave.com (accessed on 14 October 2019).
- McLaughlin, M.; Verso, B.; Proudfoot, T. A Receiver for Use in an Ultra-Wideband Communication System. Patent WO2015052486A1, 16 April 2015. Available online: https://patents.google.com/patent/WO2015052486A1/en (accessed on 14 October 2019).
- Moschevikin, A.; Tsvetkov, E.; Alekseev, A.; Sikora, A. Investigations on passive channel impulse response of ultra wide band signals for monitoring and safety applications. In Proceedings of the 2016 3rd International Symposium on Wireless Systems within the Conferences on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS-SWS), Offenburg, Germany, 26–27 September 2016; pp. 97–104. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Bishop, C.M. Mixture density networks. In Neural Computing Research Group Report NCRG/94/004; Aston University: Birmingham, UK, 1994. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning; corrected at 8th printing ed.; Information Science and Statistics; Springer: New York, NY, USA, 2009. [Google Scholar]
- Nair, V.; Hinton, G.E. Rectified Linear Units Improve Restricted Boltzmann Machines. In Proceedings of the 27th International Conference on International Conference on Machine Learning, Haifa, Israel, 21–24 June 2010; Omnipress: Madison, WI, USA, 2010; pp. 807–814. [Google Scholar]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Systems. 2015. Available online: https://tensorflow.org/about/bib (accessed on 14 October 2019).
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Ruiz, A.R.J.; Granja, F.S. Comparing Ubisense, BeSpoon, and DecaWave UWB Location Systems: Indoor Performance Analysis. IEEE Trans. Instrum. Meas. 2017, 66, 2106–2117. [Google Scholar] [CrossRef]
- Tribou, M.J.; Wang, D.W.L.; Wilson, W.J. Observability of planar combined relative pose and target model estimation using monocular vision. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 4546–4551. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H∞, and Nonlinear Approaches; Wiley-Interscience: Hoboken, NJ, USA, 2006. [Google Scholar]
- Meissner, P.; Witrisal, K. Multipath-assisted single-anchor indoor localization in an office environment. In Proceedings of the 2012 19th International Conference on Systems, Signals and Image Processing (IWSSIP), Vienna, Austria, 11–13 April 2012; pp. 22–25. [Google Scholar]
- Kulmer, J.; Hinteregger, S.; Großwindhager, B.; Rath, M.; Bakr, M.S.; Leitinger, E.; Witrisal, K. Using DecaWave UWB transceivers for high-accuracy multipath-assisted indoor positioning. In Proceedings of the 2017 IEEE International Conference on Communications Workshops (ICC Workshops), Paris, France, 21–25 May 2017; pp. 1239–1245. [Google Scholar] [CrossRef]
- Sipal, V.; Allen, B.; Edwards, D. Effects of antenna impulse response on wideband wireless channel. In Proceedings of the 2010 Loughborough Antennas & Propagation Conference, Loughborough, UK, 8–9 November 2010; pp. 129–132. [Google Scholar] [CrossRef]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ledergerber, A.; D’Andrea, R. Ultra-Wideband Angle of Arrival Estimation Based on Angle-Dependent Antenna Transfer Function. Sensors 2019, 19, 4466. https://doi.org/10.3390/s19204466
Ledergerber A, D’Andrea R. Ultra-Wideband Angle of Arrival Estimation Based on Angle-Dependent Antenna Transfer Function. Sensors. 2019; 19(20):4466. https://doi.org/10.3390/s19204466
Chicago/Turabian StyleLedergerber, Anton, and Raffaello D’Andrea. 2019. "Ultra-Wideband Angle of Arrival Estimation Based on Angle-Dependent Antenna Transfer Function" Sensors 19, no. 20: 4466. https://doi.org/10.3390/s19204466