1. Introduction
The networking of increasingly intelligent and interconnected devices has led to the emergence of novel applications and capabilities for sensing, collecting, processing and analysing data from countless sources and environments. Wireless Sensor Networks (WSNs) embody the ultimate challenge among the various types of so-called Internet of Things (IoT) applications, as the devices (nodes) in WSNs are usually assumed to be present in large numbers, and the nodes are assumed to be as inexpensive as possible, implying limited computational and storage resources, a lack of tamper resistance to physical attacks, and limited energy sources (usually batteries). Consequently, such devices (similarly to cheap smartcards and other constrained hardware) usually have to rely on symmetric cryptography as their preferred approach (as opposed to asymmetric cryptography).
Our work targets WSNs (or indeed ad hoc networks in general) that use symmetric cryptography and link keys (keys shared between two nodes connected through a communication link; every pair of nodes shares a unique key). This is the most common setting for security in WSNs, mainly due to resource restrictions. The link keys established among neighbouring WSN nodes are an essential building block for secure communication and for more comprehensive network security applications. There are multiple ways to establish link keys, ranging from one network-wide master key, probabilistic pre-distribution [
1] or plaintext key exchange [
2] up to pairwise key pre-distribution. In our scenario, we assume that every pair of neighbours shares a unique (with respect to all other pairs) link key and that this key is used to encrypt all messages exchanged between the two neighbours.
Regardless of the means of establishment, link keys will always be susceptible to attackers learning them in one way or another, ranging from cryptanalytic methods up to the extraction of keys from physically captured nodes. The core purpose of our research is to improve the overall security of a network of interconnected nodes in the case that a non-trivial proportion of the link keys have become compromised (compromised key denotes a link key that has been acquired by an attacker, regardless of the point of compromise). We address this issue through so-called secrecy amplification (SA) protocols. SA protocols do not rely on any knowledge of whether a particular link has been compromised, as it is difficult, and often even impossible, to detect such a compromise given the limited resources of the nodes in a network or the nature of the attack (e.g., passive eavesdropping).
Lightweight security solutions are necessary, imposing low computational and communication overheads. To preserve protocol simplicity, we use the basic principles of crowdsourcing. Every node executes the SA protocol based only on its limited knowledge of the local network environment and layout and independently of the decisions made by other nodes. Every node is responsible for orchestrating its protocol execution with its neighbours in its close proximity and, simultaneously, for participating in the protocol execution controlled by its neighbours. Although this could appear to be a hopeless attempt without the knowledge of the compromised links and without a broadly coordinated cooperation, the results show that the nodes, as a crowd, can achieve an excellent performance. A strong majority of secure links (>90%) can be achieved using secrecy amplification protocols, even when 50% of all network links are initially compromised [
3].
The core contributions of this article are as follows:
We verify earlier work on SA protocols (based only on simulations) through experiments in a real network.
We examine SA behaviour under realistic attacker models, and we determine the suitable length of amplification for the identified worst-case scenario and evaluate the corresponding resources consumption.
We provide tested open-source implementations of the best-performing SA protocol, HD Final, for the Arduino and TinyOS platforms.
The article is organised as follows: The second section introduces the concept of SA and also reviews related work, providing a comparative overview of various SA protocols and their properties. The third section describes a realistic attacker model that is parametrised by attacker capabilities and behaviour, concluding with an analysis of the impact of the attacker parameters on SA protocol performance. The fourth section presents the results of testbed experiments together with our implementations of the HD Final protocol for the Arduino and TinyOS platforms. Conclusions are provided in the final section.
2. Secrecy Amplification Principles and Related Work
2.1. Exploiting the Strength of the Crowd
Several research papers present the effort and results of investigating the crowdsourcing principles and their applications. The authors of [
4] focused on improving the balance between signal (data) quality and crowdsourcing cost, proposing a novel incentive mechanism based on Bayesian compressive crowdsensing. A crowdsourced WiFi-based indoor positioning system was inspected in [
5], including an identification of three attacks and corresponding countermeasures.
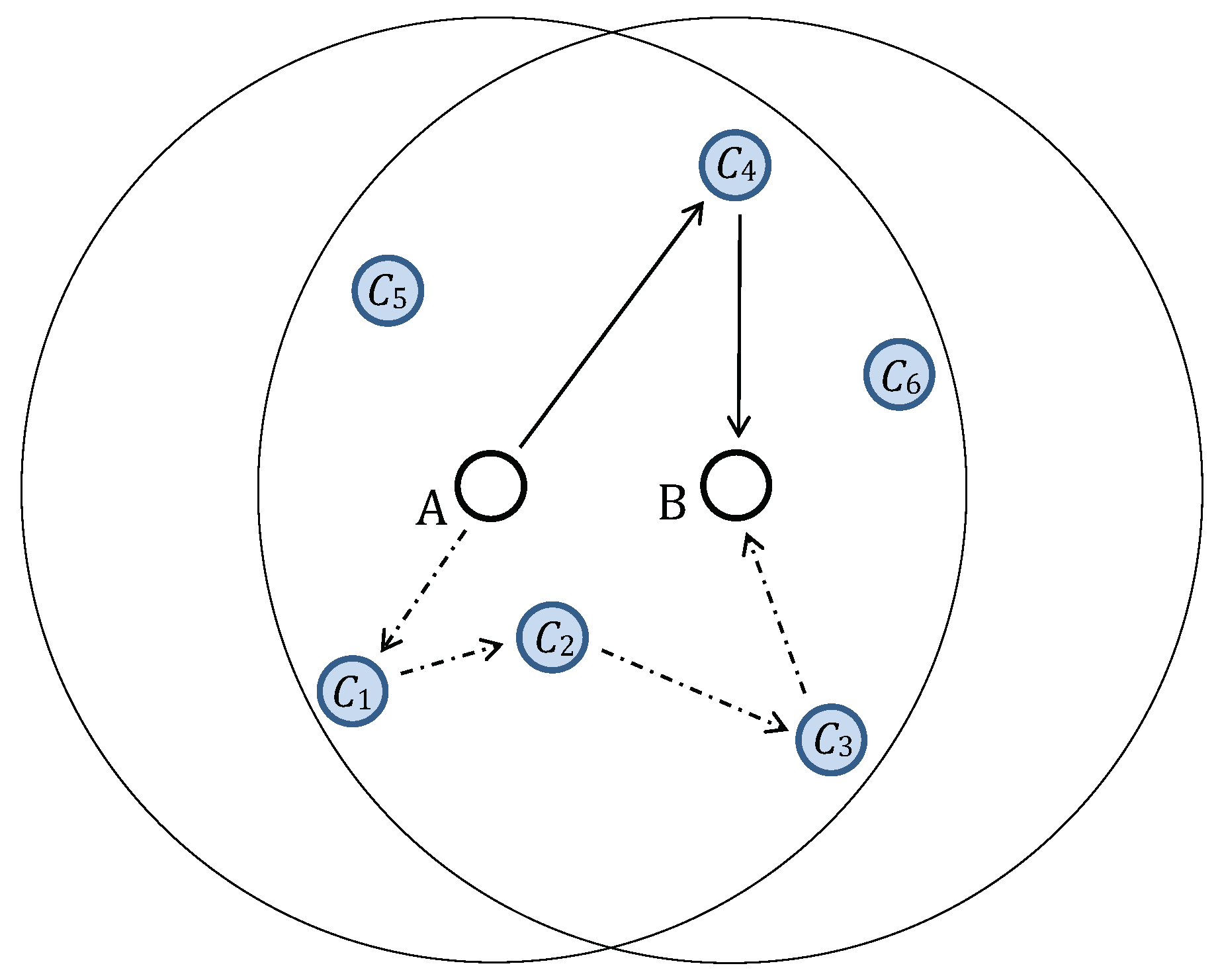
We use the crowdsourcing principles in the SA approach. Based on its limited knowledge, a particular node A is aware only of its own neighbours and their distances, as inferred from their signal strengths. Please note that inferring the relative distance from the received signal strength indication (RSSI) is usually a burden with errors resulting from the generally unreliable propagation of wireless signal and also as the relation between distance and RSSI is not linear. Relative distances used in group-oriented and hybrid designed protocols are robust against moderate inaccuracies as a precise node position is not required for protocols to succeed. The node can attempt to re-secure a possibly compromised link key (the link key may be compromised or not; the node cannot determine a link key’s status based on its knowledge) established with its neighbouring node B by trying to use a non-compromised path from node A to node B.
First, the node
A generates a random key update with the same length as the established link key. Later on, the key update will be combined together with the current link key to create a new (secure) link key using a state-of-the-art cryptographic hash algorithm. Second, the node
A selects one or more intermediate nodes
,
, …,
(which are common neighbours of both nodes
A and
B) and forms the path
A –>
–>
–> … –>
–>
B for key update delivery. Please refer to
Figure 1 for two examples. Every node along the path would, in most cases, be a neighbour of both its predecessor and its successor. If not, the path is broken, and the key update will not be delivered. Previous research [
6] has shown that even one intermediate node is sufficient to maintain the effectiveness of the protocol, using only a small fraction of the limited available resources and mostly avoiding the issue of unreachable nodes along the path. SA protocols should be robust and should yield good results even when messages are lost on delivery or when paths are broken as described above. The transmitted key update messages are encrypted using the underlying link keys in a hop-by-hop manner if such link keys already exist. Finally, nodes
A and
B mutually confirm that both share the same key after the exchange of key update messages.
If the key update remains unknown to an attacker, because of the attacker’s inability to either decrypt the message or correctly learn it through eavesdropping (e.g., as a result of mishearing caused by a packet collision), then the link key between nodes A and B is updated and re-secured against the attacker.
A secrecy amplification protocol specifies a procedure for selecting a particular neighbour for a key update delivery and determining a sequence of intermediate nodes to form a delivery path and governs the number of protocol repetitions and the length of execution. The resulting SA protocol is a trade-off between its resource requirements (e.g., the energy required for message transmission) and its ability to improve the number of secure links in the network. The overall design goal is to develop SA protocols that can secure a high number of links yet require only a small number of messages to save precious energy during radio transmissions. Thus, such a protocol needs to be as simple as possible.
From the attacker’s point of view, she initially has access to several compromised link keys (by means of cryptanalytic methods, the extraction of keys from physically captured nodes, eavesdropping on initial key establishment, etc.). To maintain such a compromise, she needs to eavesdrop on as many secrecy amplification messages as possible. This requires constant monitoring of the entire network, as the amplification process can be executed multiple times during the network’s lifetime. If the attacker loses track of one link key that is re-secured, then it can and will be used to transmit more key updates to its neighbours later in the execution of the protocol. The more non-compromised links exist in the network, the faster the convergence towards a secure network will be.
SA protocols have also recently been exploited in a combination with key extraction from radio channel fading, with promising results for certain types of networks and their operational environments [
7,
8].
Different classes of SA protocols use different capabilities to improve security throughout a network. Although all SA protocols attempt to establish new (possibly more secure) link keys, three main distinct classes of SA protocols exist.
2.2. Node-Oriented Protocols
Node-oriented protocols were first introduced by Anderson et al. in [
2] to provide an additional layer of protection after plaintext key exchange in a key distribution approach called
key infection. Such a protocol is very simple; it sends key updates via every possible neighbour. The main advantages of node-oriented protocols are the simple synchronisation of multiple protocol executions running in parallel and their generally low memory overheads.
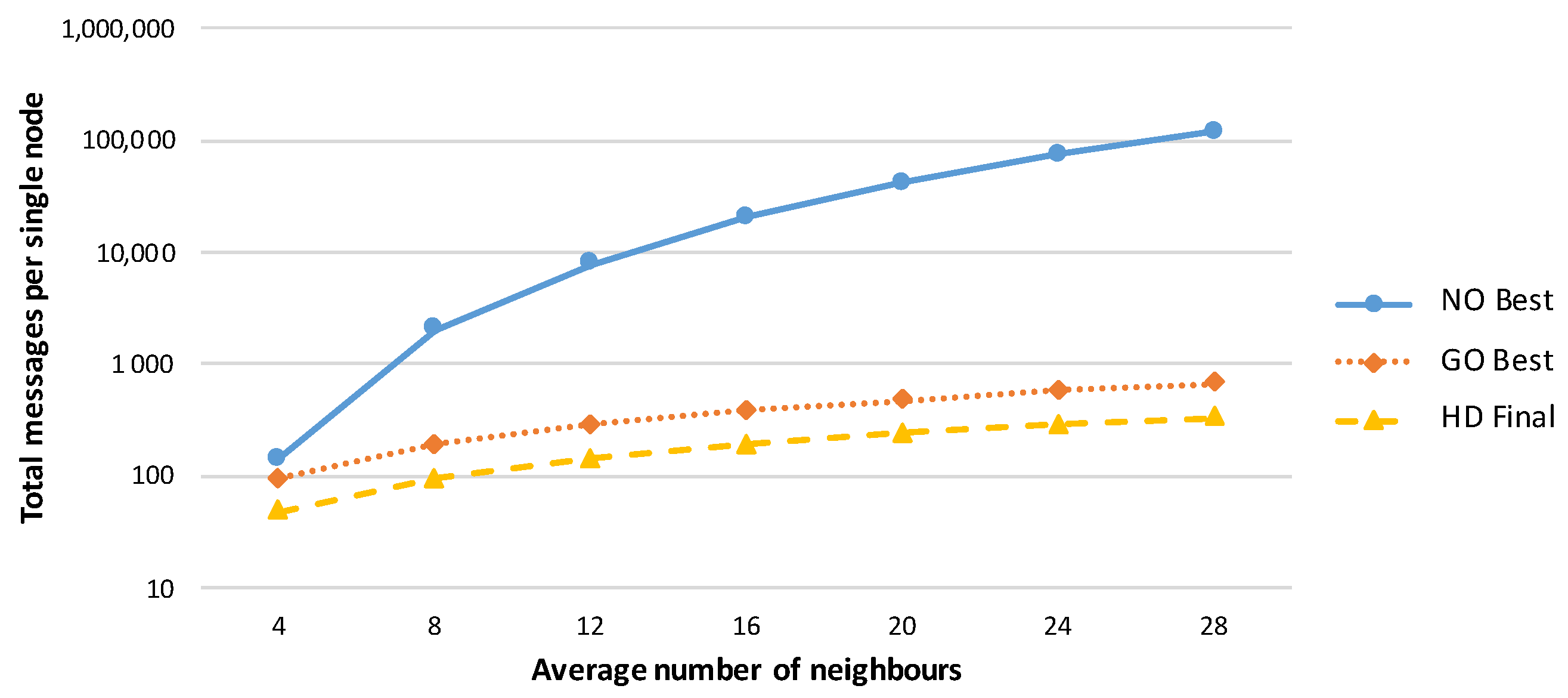
A node-oriented protocol is executed for all possible k-tuples of neighbours in the network, and the number of such k-tuples can be high, especially in a dense network. This is the most limiting property of node-oriented protocols, as it results in an enormous number of messages being sent by every node. The number of messages increases polynomially with respect to the number of neighbouring nodes and exponentially with respect to the number of parties participating in the protocol (the number of intermediate nodes along every path from node A to node B).
The first node-oriented protocol, denoted as the Push protocol, was presented by Anderson et al. in [
2]. Liu et al. used the Push protocol as a basis for an establishment of the intra-group link keys between multiple nodes belonging to different groups, where a more structured deployment was assumed [
9]. A variant of the initial key exchange mixed with the Push protocol (denoted as Commodity) without an explicit SA was presented by Kim et al. in [
10], together with a formal security proof. The fraction of secured links was lower than for the Push protocol alone. A multi-hop version of the Push protocol was analyzed by Liu et al. in [
11]. Variants of the Push and Multi-hop Push protocols called Pull and Multi-hop Pull protocols were presented by Cvrcek et al. in [
12]. The best-performing node-oriented protocol (NO Best) was presented by Svenda et al. in [
3] and more information about that protocol is provided in the
Appendix A.1.
2.3. Group-Oriented Protocols
Group-oriented protocols were first proposed by Svenda et al. in [
3] to decrease the number of messages sent during an amplification protocol to overcome the main limitation of node-oriented protocols. Neighbouring nodes share key update values within a larger group of cooperating nodes identified by their geographic locations with respect to nodes
A and
B (to re-secure the key
). In a previous study, group-oriented protocols were automatically generated using linear genetic programming [
13], and the SensorSim network simulator developed by the authors of [
3] was then used to evaluate the quality of the candidate protocols.
Group-oriented protocols require a higher level of cooperation and information sharing among neighbouring nodes. The crucial disadvantages of group-oriented protocols are the challenge of synchronising parallel executions and the complexity of the security analysis due to the high number of nodes involved. Consequently, neither a detailed evaluation nor even an implementation (outside of simulators) of group-oriented protocols has ever been reported.
The best-performing group-oriented protocol (GO Best) was presented by Smolka et al. in [
14] and more information about the protocol is provided in the
Appendix A.2.
2.4. Hybrid Designed Protocols
Hybrid designed protocols [
6] combine the advantages of both node- and group-oriented protocols. They are constructed using genetic programming in combination with manual post-processing. They take advantage of knowledge obtained through both node- and group-oriented protocols (hence the term hybrid design) and statistical data about the most suitable placement of the participating intermediate nodes. Hybrid designed protocols use both sub-protocols (similarly to node-oriented protocols) and relative distances (similarly to group-oriented protocols) and perform several repetitions of the entire process to achieve the required success rate.
The resulting protocols are very simple and require less cooperation compared with group-oriented protocols. They outperform both node- and group-oriented protocols with respect to their success rates while sending fewer messages. They are easy to analyse and implement and enable simple synchronisation and parallel execution.
Examples of hybrid designed protocols include HD Final and HD Best [
6]. More information about both protocols is provided in
Appendix A.3 and the implementation of the HD Final protocol is discussed later in
Section 4.2.
2.5. Protocol Comparison
A comparison of various amplification protocols with respect to the number of messages sent is presented in
Figure 2. The success rates of the amplification protocols executed in networks with different numbers of initially compromised links are shown in
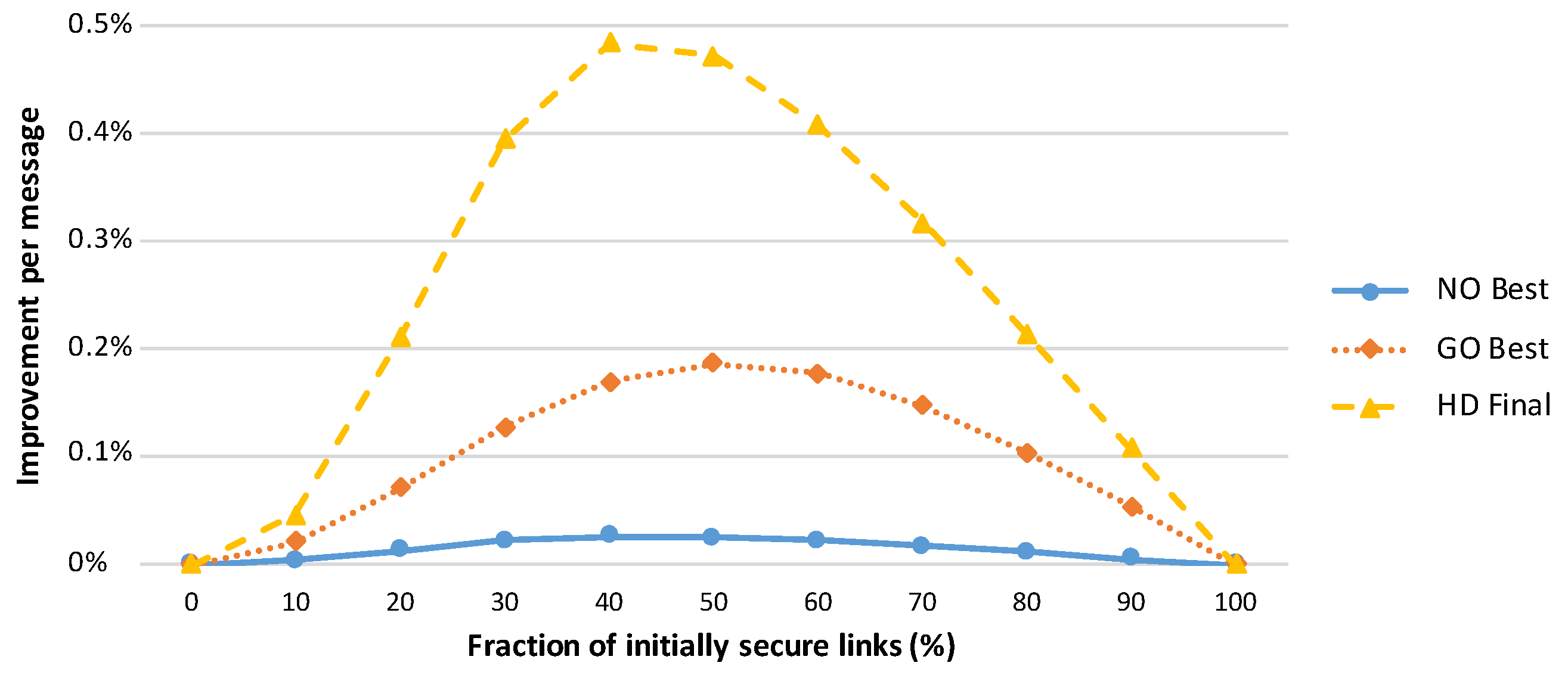
Figure 3, and the effectiveness of the protocols is compared in terms of the security gained per message sent during amplification protocol execution in
Figure 4.
A detailed comparison of the properties of different amplification protocols and their results for multiple compromise patterns and for networks with different densities are provided in a paper by Ostadal et al. [
6].
We used the simplified simulator SensorSim [
3] of Svenda et al. during the initial phase of our SA protocol research. This simulator enabled the use of genetic programming during the protocol proposal stage and permitted an extensive evaluation of the average protocol performance for different network layouts and in different scenarios. The main advantage of SensorSim is the speed of simulation. However, this simulator lacks many essential components for realistic network simulations, such as radio signal propagation and MAC layer collisions.
3. Attacker Behaviour and Capabilities
During the initial research of SA protocols and the identification of the major node-oriented, group-oriented and hybrid designed protocols of interest, a weakened attacker model and subsequent simple attacker model were used. Both came with very simplified and unrealistic properties allowing only basic SA protocol examination and evaluation. Later, a further development of a realistic attacker model was necessary for the evaluation and verification of the SA protocols’ properties and performance. We formulate a set of realistic attacker characteristics in terms of attacker behaviour and capabilities, and we evaluate the performance of several major SA protocols based on this advanced, realistic attacker model. Please note that we exclude group-oriented protocols from the subsequent comparisons because of the issues described in
Section 2.3 (e.g., complex synchronisation and implementation).
Together with the new attacker model, a more advanced and realistic network simulator was needed. We extend the KMSforWSN framework, a tool for automated evaluation of the properties of key management schemes (KMSs) in WSNs, which is built on top of MiXiM [
15], a WSN framework for the OMNeT++ simulator [
16]. This framework was introduced by Jurnecka et al. in [
17], and our extension is available as an open-source tool (
http://crcs.cz/papers/cans2016).
3.1. Weakened Attacker Model
For the following discussion, we need to explain the weakened attacker model. The weakened attacker model assumes that the attacker is able to monitor only a fraction of links for a short interval. This assumption is valid only for a certain period of time after deployment and then we have to consider a stronger attacker with the ability to eavesdrop all communication. The attacker with a limited number of eavesdropping devices can eavesdrop only a fraction of links and the rational reason behind this assumption is based on specifics of WSNs:
Locality of eavesdropping: The low communication range of nodes allows for a frequent channel reuse within the network and detection of extremely strong signals, so it is not possible for an attacker to place only one eavesdropping device with a highly sensitive and strong antenna.
Low attacker presence during deployment: A low threat in most scenarios during the first few seconds before the attacker realizes what target area is in use. If the attacker nodes are already present in a given amount in the target location, we can deploy a network with density and node range such that the ratio between legal nodes and the attacker’s eavesdropping devices is such that a secure network can be formed.
3.2. Simple Attacker Model
A simple attacker model considers compromised networks that exhibit only two different compromise patterns: random compromise and key infection.
A random compromise pattern is the result of a node-compromise attacker model together with a probabilistic pre-distribution key establishment scheme [
1]. In this model, the attacker captures a fraction of the deployed nodes and extracts keying material from captured nodes. Because of the probabilistic pre-distribution mechanism, the attacker may be able to compromise additional links based on the extracted keying material.
The key infection pattern assumes a weakened attacker model [
2] together with a key establishment mechanism in which link keys are exchanged in plaintext.
After the initial compromise, we assume a global passive attacker who is able to monitor all communications in the entire network.
3.3. Realistic Attacker Model
A realistic attacker is parametrised by her capabilities and behaviour [
18]. She does not have global coverage of the network, but she is able to eavesdrop on messages based on her equipment and current position. The attacker parameters can be divided into two separate groups: behaviour parameters and resource parameters.
The behaviour parameters characterise the attacker’s strategy and behaviour during her activity. We investigated various initial compromise patterns (established by the attacker extracting keying material from selected nodes), ranging from the compromise of random nodes up to a case in which the attacker traverses the network and selects nodes along her trajectory (e.g., nodes around the border or at the centre of the network or nodes along a path from the border to the centre). The movement pattern of the attacker describes the attacker’s eavesdropping activity during the execution of the SA protocol. The investigated patterns range from a random walk and linear and circular patterns up to the coordinated patrolling of a targeted area. Multiple initial attacker locations and different attacker movement speeds were investigated.
The resource parameters define the available resources and capabilities of the attacker. We investigated the SA protocol performance for cases in which several attackers work together to eavesdrop on as many communications as possible. The eavesdropping range depends on the available equipment and its sensitivity, and it strongly influences the attacker’s success. The last investigated parameter corresponds to the attacker’s ability to infect a WSN node with malware when initially compromising the node. Such a node is then under the attacker’s control, but the control remains passive, aside from providing a monitoring functionality, the malware does not affect any behaviour of the node. We investigated the impact of an increasing number of infected nodes in the performance of the SA protocols.
3.4. Impact of Attacker Models on the SA Protocols
It was necessary for us to overcome the limitations imposed by the simplified simulator prior to further evaluation. We used an extended version of the KMSforWSN framework together with definitions of the channel and physical layer settings based on previous research of Stetsko et al. on the real parameters of TelosB sensors for an outdoor environment [
19]. We simulated the network execution not only as a graph discovery problem (as in SensorSim), but also through a full emulation of the code running on virtual nodes, with execution of the application logic and the passing of messages to the communication stack. The simulation encompassed realistic attacker behaviour and capabilities, including movement patterns and equipment sensitivity.
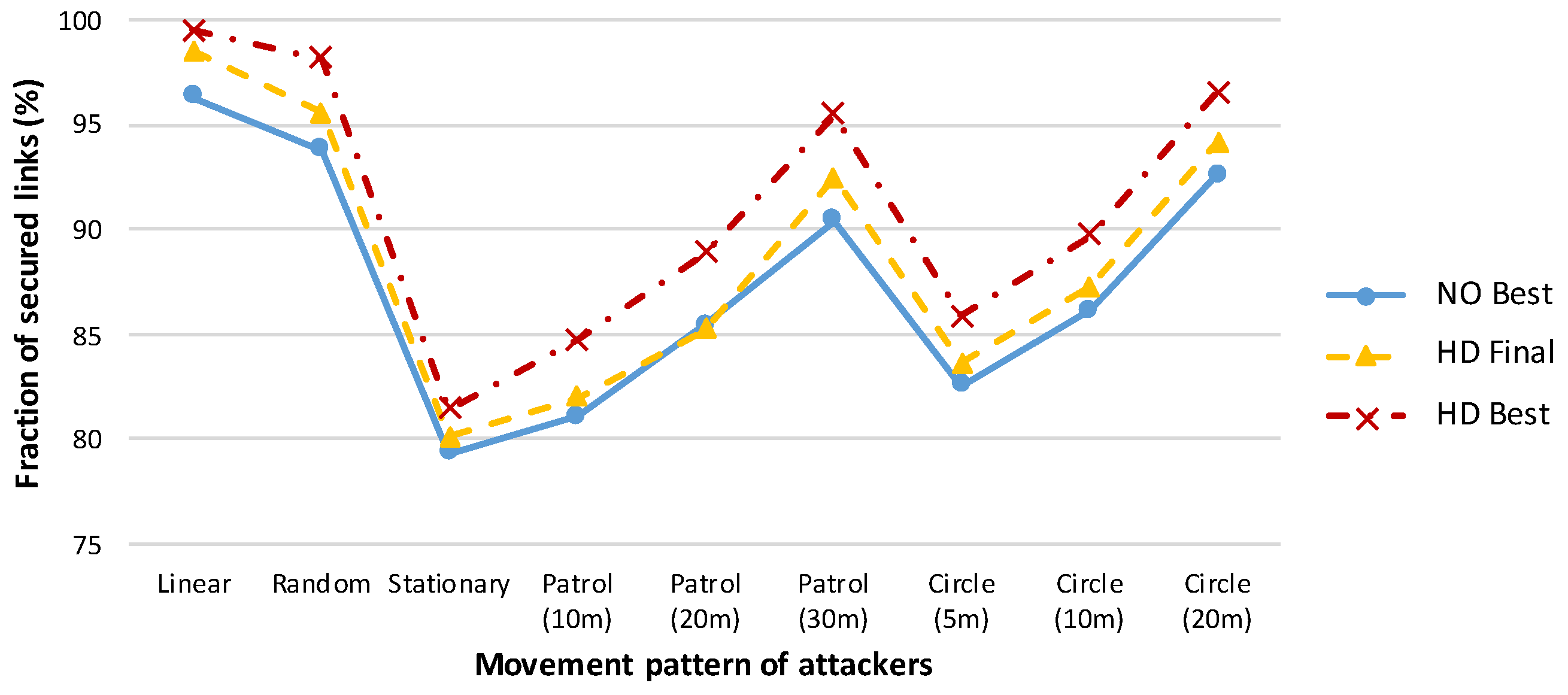
Ostadal et al. performed an extensive number of realistic simulations of various scenarios and attacker models. They determined a ranking of the major amplification protocols of interest based on their performance in a prevalent number of investigated cases. The hybrid designed protocols outperformed the rest in all scenarios we examined, and these protocols were found to be robust across different attacker behaviour patterns and capabilities. Please note that the NO Best protocol produces almost the same results as the HD Final protocol, but at the price of an enormous increase in the number of messages sent.
Simulator-based results of Ostadal et al. indicate that
the most favourable strategy for an attacker is to remain in one place throughout the entire secrecy amplification process, as she is able to eavesdrop on all communications within a particular area. Any movement leads to a reduction in the set of compromised keys in any area from which she leaves because of missed transmissions of SA protocol messages with fresh keys.
Figure 5 presents the results of the investigated SA protocols for various attacker movement patterns. Those findings served as the basis for our implementation of the hybrid designed protocol HD Final on several platforms to facilitate its broader usage and to enable our testbed experiments.
A detailed evaluation of Ostadal et al. of attacker behaviour and capabilities is presented in [
18].
4. Testbed Experiments and Results
Even the most detailed simulator can only approximate a real environment, most notably because of the incomplete specification of complex radio propagation behaviours and the various limitations of real-world devices, including the behaviour of software stacks.
To validate the simulated results, we performed several experiments using real WSN nodes in a testbed network with three main goals. Our purpose was to verify the results, performance, and expected benefits of the SA protocols in a real environment. Furthermore, we wanted to investigate the impact of the attacker strategies, behaviour patterns and capabilities described at the end of
Section 3.
We also wanted to investigate protocol performance and to determine a suitable duration (together with a suitable number of protocol repetitions) of the HD Final protocol to achieve reasonable network security (more than 85% secured links) in the worst-case scenario. The worst-case scenario corresponds to the initial compromise of all link keys and the most favourable attacker strategy, in which she starts at a position from which she can monitor the entire network and remains stationary.
Last but not least, we provide implementations of the HD Final protocol for two selected platforms, Arduino [
20] and TinyOS [
21], which are available online as open-source implementations. We selected the HD Final protocol because of its superiority compared with the node- and group-oriented protocols, based on the comparisons presented in
Section 2. Compared with the HD Best protocol, HD Final sends significantly fewer messages, yet achieves a sufficiently high success rate.
4.1. Testbed Network and Experimental Setting
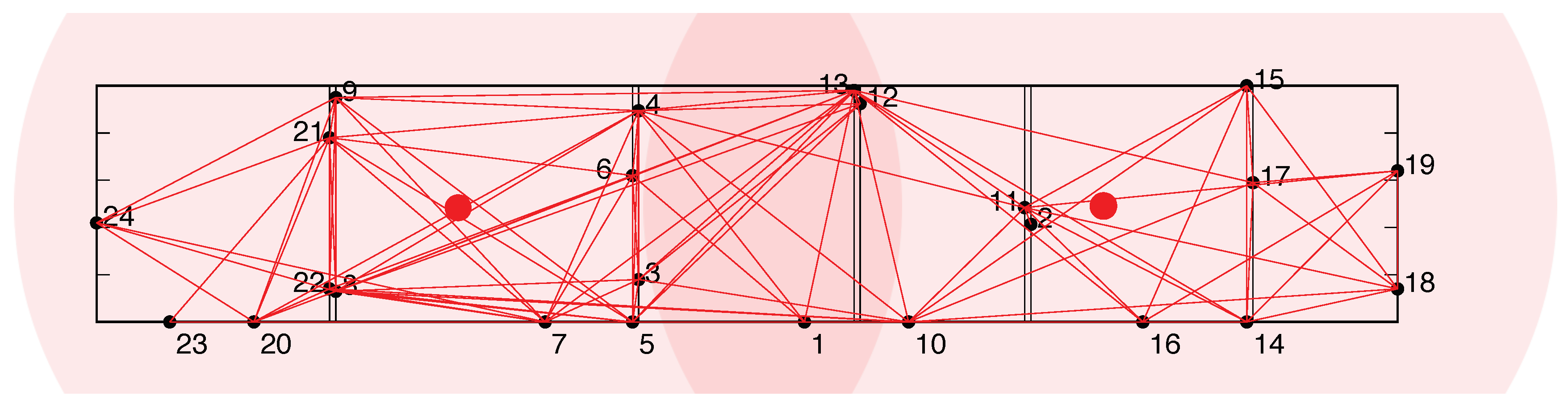
Our testbed network consisted of 24 legitimate nodes placed below the ceiling in six adjacent rooms. We performed the experiments using JeeLink Classic v3 devices (
http://jeelabs.net/projects/hardware/wiki/JeeLink). Every node was equipped with an ATmega328p AVR microprocessor (Atmel) and an RFM12B wireless radio module (HopeRF), operating at a frequency of 868 MHz. The topology of the network was known in advance; each node had 7.83 neighbours on average, resulting in a total of 94 links in the network.
The reference length is a necessary parameter for the execution of a hybrid designed protocol (used for the selection of intermediate nodes); it represents the approximate distance between the most distant pair of neighbours in the network. We experimentally determined this length to be 13 meters. This value will be different for every network, as it is highly dependent on the environment, the placement of the WSN nodes and the hardware used. The duration of the amplification protocol was set to five minutes to achieve a reasonable trade-off between the execution time being too short (increasing message collisions) or too long (limiting normal network use).
We investigated a scenario with two cooperating attackers, each covering approximately half of the network. Both attackers were equipped with hardware equivalent to that used by legitimate nodes. The network layout and attacker starting positions are shown in
Figure 6. All presented results are averages over 10 repeated measurements in our testbed network.
4.2. Arduino and TinyOS Implementations
We provide implementations of the HD Final protocol for two widely used platforms: Arduino and TinyOS. Both implementations have been released as open-source code in a Git repository, available through this article webpage (
https://crocs.fi.muni.cz/papers/iot2018).
The protocol consists of two phases, and the user is expected to define three basic configuration parameters: an amplification length, a maximum number of neighbours, and the reference length (described above). The amplification length parameter has a significant impact on the amount of message collisions and a largely reduced amplification length could result in HD Final protocol failure. The maximum number of neighbours determines the size of data memory required to store a neighbour table. The node maintains the following information for every neighbour: neighbour ID [8 bits], first intermediate node ID [8 bits], second intermediate node ID [8 bits], shared key [128 bits], key update generated [128 bits], and key update received [128 bits]. A large amount of neighbours could deplete the memory of a low end devices, such as TelosB.
In the first phase, the HD Final protocol requires information about the neighbours of the node on which it is running and their respective distances. The coarse distances may be obtained through received signal strength indication (RSSI) measurements, or the network topology may be known in advance. Our implementation is currently designed for a known network topology, but it could be easily updated to consider RSSI measurements (where such measurements are possible for the given hardware). The node itself () identifies two intermediate nodes for every neighbour () based on the measured distances. The process requires knowledge of all mutual neighbours of and nodes and the measured distances of every intermediate node from both and . In a case that no mutual neighbour exists, the direct link between and is used. The total number of key update messages is calculated based on number of neighbours, and the dispatching of messages is planned uniformly over the defined protocol duration.
In the second phase, the node generates key update messages and sends them according to the timing calculated in the first phase. Every key update value is at the same time stored in the neighbouring table in the key update generated field for respective node. The key update will be used later to update the shared key when confirmed by the node. A key update message consists of the key update value, the ID of the node, the ID of the intermediate node (which only forwards the message) and the ID of the node. Every subsequent message is sent to a different neighbour, using a round robin approach on the neighbour table. This approach provides a sufficient time for message processing by the node and for the key update confirmation. Once the message is received by the node, the node generates and sends a nonce confirmation message consisting of the ID and ID. The updates the mutual shared key when the nonce confirmation message is received. The updates the mutual shared key when the acknowledgement for nonce confirmation message is received. The HD Final protocol finishes when all key update messages were sent and processed.
Both implementations provide simple and reliable message delivery with up to four message retransmissions in the case that a message is lost. All messages sent during protocol execution are acknowledged. All messages and retransmissions are sent with a small random delay to limit the amount of message collisions.
4.3. Practical Examination of Published Results
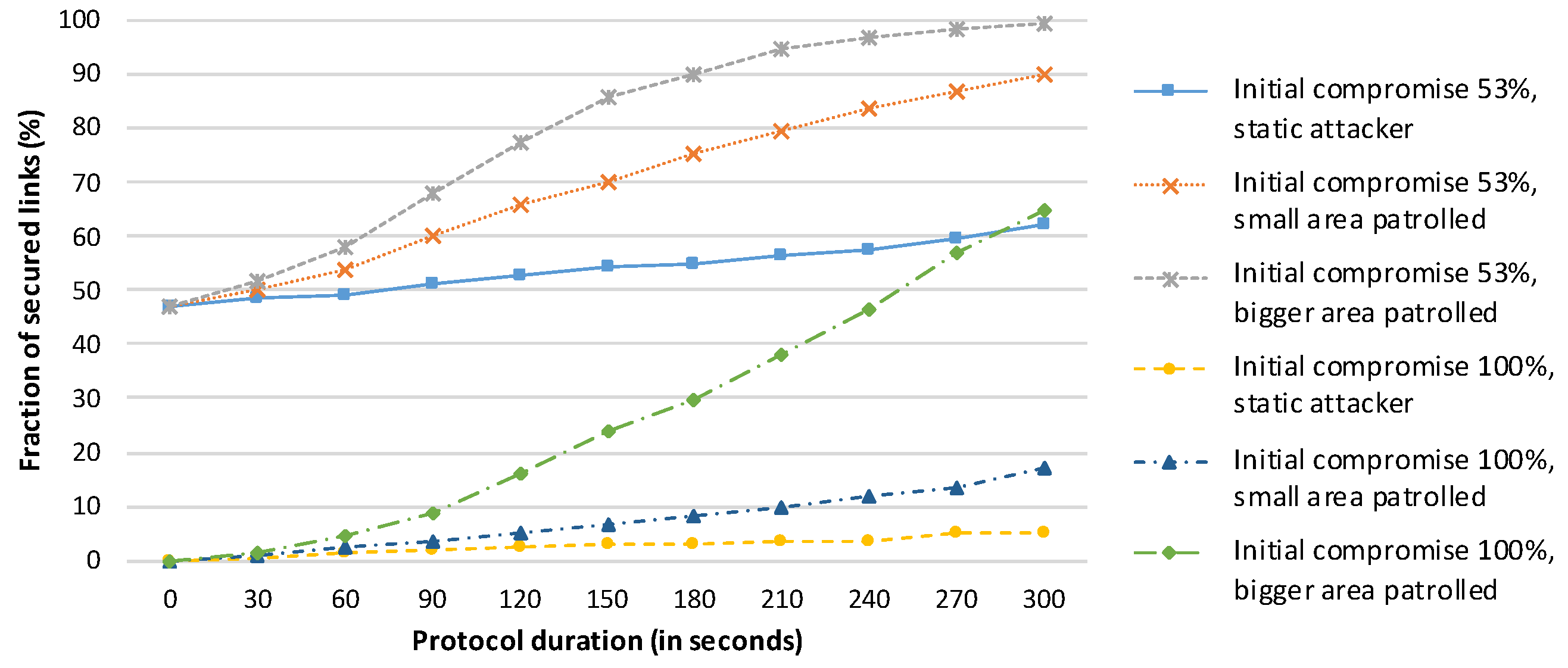
The goal of the first experiment was the verification of the performance of the HD Final protocol and of the most favourable attacker strategy for maintaining a compromised state in a WSN network. We investigated three different attacker settings: (1) The attacker remains stationary in her starting position and does not move at all. (2) The attacker patrols a small area around her starting position (in a range of approximately 1.5 metres), remaining in the same room. (3) The attacker patrols a larger area including locations more distant from her initial starting position, even visiting the two adjacent rooms. Moreover, we investigated the performance of the HD Final protocol for an attacker starting outside the rooms and patrolling the corridor along the bottom side of
Figure 6.
We considered two different compromise patterns. (1) Random nodes are compromised, with up to 50% of links being compromised. When a node is compromised, all keying material is extracted, but the node continues to perform legitimately in all subsequent operations. Using this process, 53% of the link keys were compromised on average during our experiment. (2) The worst-case scenario, in which the keys from all nodes are compromised, resulting in 100% of the links being initially compromised.
The experimental results are shown in
Figure 7 for an attacker starting within the WSN. We can observe a security improvement provided by the SA protocol on the real hardware and in the real environment. There is a proven benefit to using SA protocols, HD Final in particular. Execution of the HD Final protocol improves network security, but the success rate strongly depends on the attacker’s behaviour. We observe only a small improvement for the case in which all links are compromised (approximately 3.5% improvement), but a larger improvement for the case in which 53% of the links are compromised (approximately 15% improvement). These findings illustrate the strength of SA protocols using non-compromised paths.
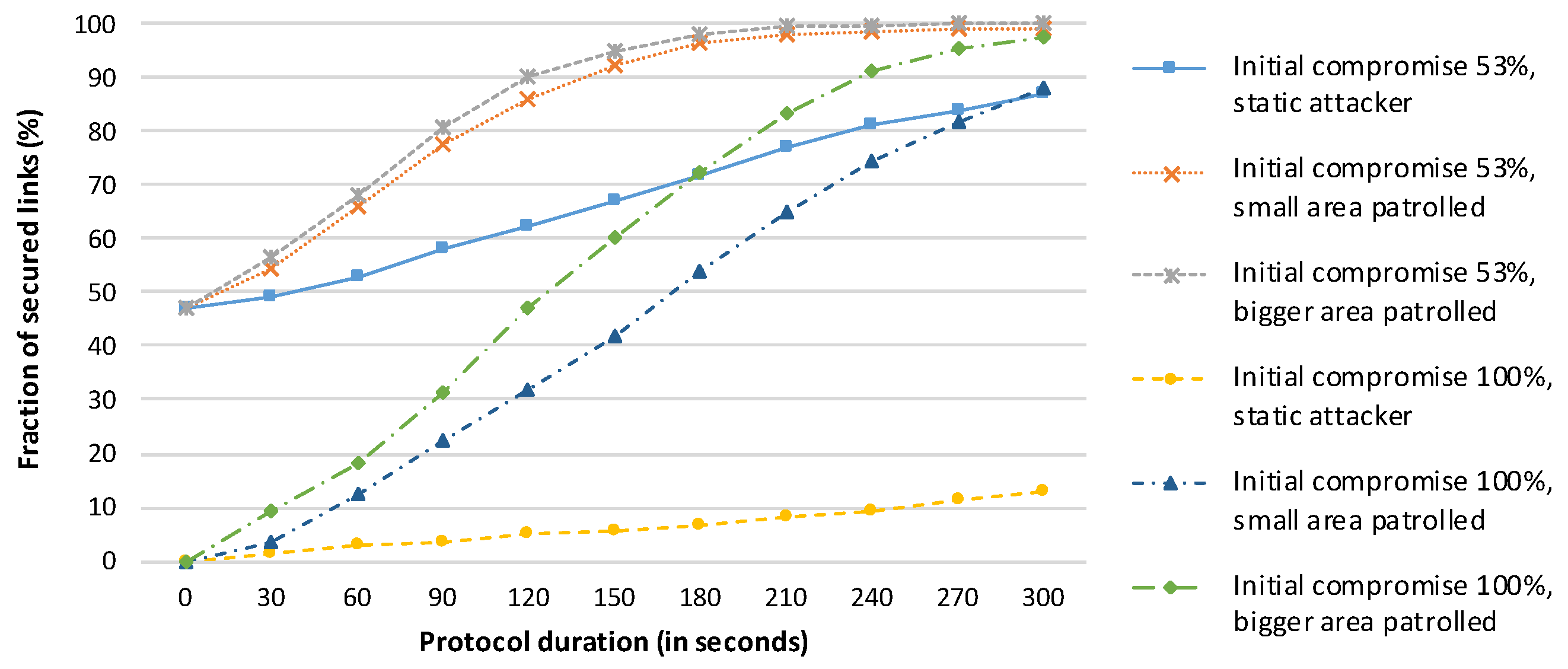
The experimental results for an attacker starting outside the network in the corridor are shown in
Figure 8. The success rates of the HD Final protocol are greatly improved as a result of the disadvantageous position of the attacker. The success rate is greater than 85% even for the case in which 100% of the link keys are initially compromised, provided that the attacker does not remain stationary.
These results provide clear confirmation that the most beneficial strategy for the attacker is to remain stationary and consistently eavesdrop a particular area. Any kind of attacker movement results in a non-monitored part of the network (the area being eavesdropped by the attacker positioned before the movement and not being monitored after the movement) that is immediately re-secured by the SA protocol. Even a short period of time (before the attacker returns to the original position) is sufficient for a significant improvement of the success rate.
This verifies the findings from [
18] that were based on simulations. Furthermore, the larger is the area patrolled by the attacker, the fewer links remain compromised and, consequently, the higher is the SA success rate. This confirmation is consistent with the results of Ostadal et al. presented in
Figure 5.
The small improvement achieved in the worst-case scenario, in which all link keys are compromised and the attacker remains stationary at the most suitable position, is due to packet collisions and interference causing the attacker to mishear eavesdropped communications. This was the main motivation for the experiment reported in the following section.
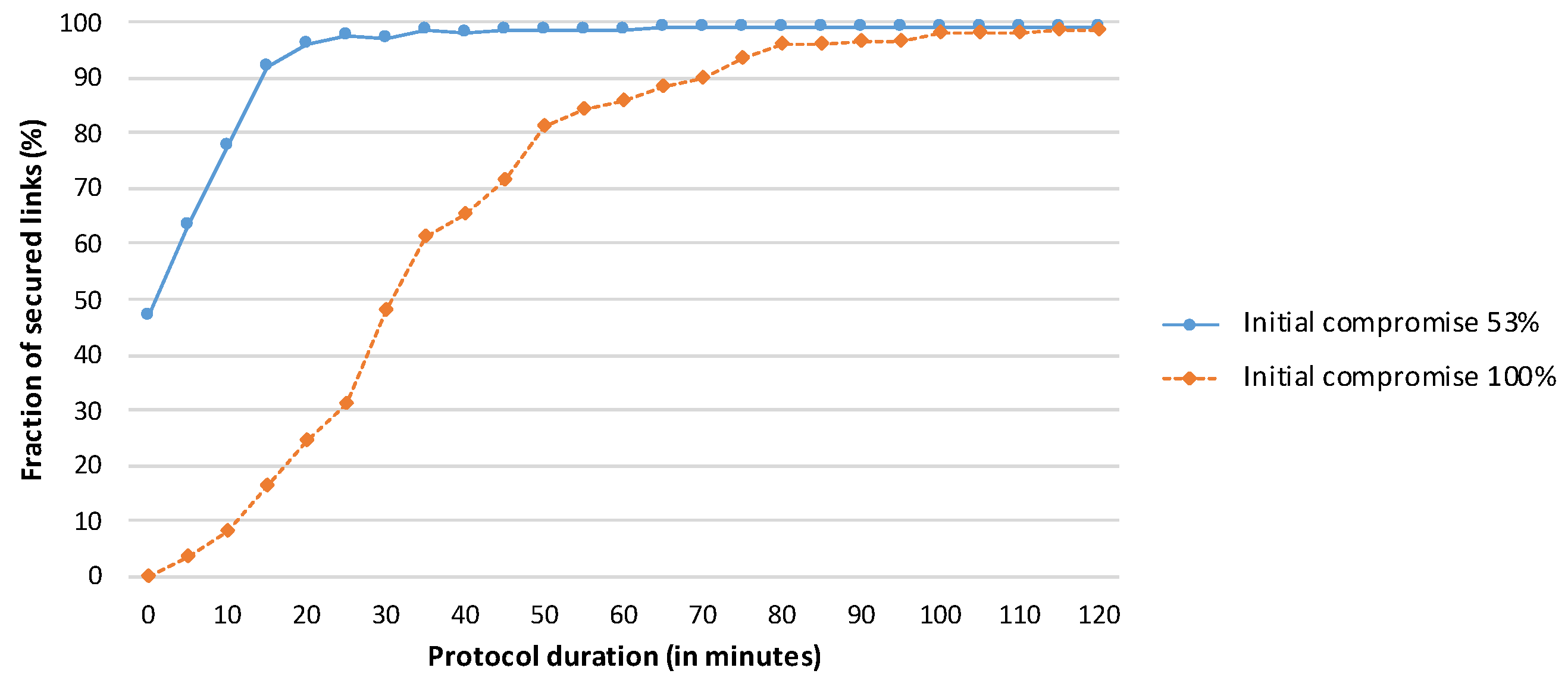
4.4. SA Protocol Performance in the Worst-Case Scenario
The objective of this experiment was to identify the number of repetitions of the HD Final protocol (and the protocol duration) required to achieve reasonable network security (more than 85% secured links) for the scenario in which
all links are initially compromised. We repeated the complete HD Final protocol 24 times, with the resulting execution time of 2 h. We also include an evaluation of the protocol performance for the case where 53% of the links (instead of all links) are initially compromised as a reference for comparison. The results are presented in
Figure 9.
The HD Final protocol results in a reasonably secure network after 15 min for the case in which half of the links are initially compromised and after one hour for the worst-case scenario. Moreover, the protocol is able to ensure that 98% of the links are secured after 100 min in the worst-case scenario. The average numbers of messages sent per node are 282 for a protocol duration of 15 min, 1128 for a one-hour run, and 1880 for a 100-minute execution time.
The increase in the number of secured links is initially rapid, as the protocol can immediately use the newly secured links to its advantage. As the network approaches the state in which most links are secured, the increase slows, as not all secured paths are used (the HD Final protocol identifies only two intermediate nodes) and it may be more difficult to secure particular links (e.g., because of a lack of common neighbours for a neighbouring pair on the border of the network).
5. Conclusions
Our work reviews the evolution of SA protocols, from their first conception up to the real implementation of the best-performing protocol, HD Final, for the Arduino and TinyOS platforms to enable facile integration into real-world applications. Using the principles of crowdsourcing, the HD Final protocol is executed independently of the decisions made by other nodes and even without knowledge of whether a particular link is compromised, resulting in a very simple protocol that permits easy synchronisation and parallel execution.
The attacker model was investigated in detail, and realistic attacker capabilities and behaviour were considered, concluding with an identification of the worst-case scenario. The HD Final protocol was shown to be robust against different attacker parameters, providing great benefit even in the worst-case scenario. The HD Final protocol can ensure that 98% of all links are secured after 100 min (with 1880 messages sent per node on average) when it is executed in a network in which all link keys are initially compromised and with the attacker covering the entire network and remaining stationary. We conducted testbed experiments in a real WSN, obtaining findings that confirmed the simulation results.
One of the key characteristics of SA protocols is their good performance even when a non-trivial proportion of the link keys are compromised. SA protocols can be used either in reaction to a network compromise or even as a preventive measure as part of an overall layered security strategy. Another usage mode is to execute an SA protocol after plaintext key exchange in a newly established network, thereby ensuring the required level of network security with a reasonable investment of time and energy resources.
Considering the simplicity of SA protocols and the benefits they provide, we expect that their use cases should not be limited to the IoT world. As crowdsourced security has and will have many other applications, our findings and implementations may also find use in different applications based on or related to key re-securing/updating.
Author Contributions
R.O., V.M., and P.S. designed the SA protocols and proposed the realistic attacker model; R.O., L.N., P.S., and V.M. conceived and designed the experiments; L.N. designed and programmed the testbed, R.O. implemented SA protocols for Arduino and TinyOS environments; R.O. and L.N. executed the experiments and evaluated the experimental data; R.O., V.M., and P.S. wrote most of the article.
Funding
This research received no external funding.
Acknowledgments
We would like to thank to all members of CRoCS for support during the experiments.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| SA | Secrecy amplification |
| WSN | Wireless sensor network |
| IoT | Internet of Things |
| KMS | Key management scheme |
| RSSI | Received signal strength indication |
Appendix A. Detailed Description of Discussed Protocols
We provide a detailed description and a pseudo-code of discussed SA protocols: NO Best, GO Best, HD Best and HD Final.
Every network node orchestrates the protocol execution in the role of a master node. The master node continuously selects slave nodes from its neighbours. The link key shared between the master and slave nodes is updated. Several other neighbouring nodes could participate in the protocol in the role of intermediate nodes. Intermediate nodes do not update any link keys in node-oriented and hybrid designed protocols. Link keys among all participating nodes are updated in case of group-oriented protocols.
Every node in the protocol is modelled as a computing unit with a limited number of memory slots. Each memory slot can contain either a key update generated on the node or the key update received from a neighbouring node. SA protocol is then a sequential chain of primitive instructions, generating key updates into memory slots and exchanging key updates among nodes. The two instructions being used follow:
Appendix A.1. NO Best Protocol
The NO Best protocol is 4-party node-oriented protocol, requiring the involvement of the master node, the slave node, and two intermediate nodes. The pseudocode of the NO Best protocol is provided in Protocol 1. We assume that every node is aware of its neighbours before the protocol is executed.
Every node executes the NO Best protocol in a role of the master node (row 1). The master node selects iteratively slave nodes (row 3) and two intermediate nodes (rows 4 and 5) from its neighbours. After the determination of all parties, the master node informs the intermediate node 1 about its role (row 6) as the node is responsible for key update generation.
Three key updates are generated during the execution of the NO Best protocol for every selected 4-tuple: two by the master node and one by the intermediate node 1. Key updates need to be shared by both master and slave nodes, as the two nodes will later update the shared link key. The first key update is generated by the master node and sent directly to the slave node (rows 7 and 8). The second key update is generated by the master node and sent to the intermediate node 2; the intermediate node 2 delivers the key update to the slave node (rows 9–11). The third key update is generated by the intermediate node 1. The key update is delivered directly to the master node and to the intermediate node 2. Intermediate node 2 finally sends the key update to the slave node (rows 12–15). All three key updates are independent and the order of the delivery is not important.
Master and slave nodes mutually confirm every received key update. The key updates are used to update the link key after the successful confirmation (row 16).
| Protocol 1 Pseudocode of the NO Best protocol. |
![Sensors 19 05041 i001]() |
Appendix A.2. GO Best Protocol
The GO Best protocol is a group-oriented protocol requiring the involvement of the master node, the slave node, and up to 33 intermediate nodes. The number of intermediate nodes is highly dependent on the number of master node’s neighbours. The pseudocode of the GO Best protocol is provided in Protocol 2. We assume that every node is aware of its neighbours and of the distances between the node and every neighbour before the protocol is executed. Those distances can be obtained through received signal strength indication (RSSI) measurements, or the network topology may be known in advance.
Every node executes the GO Best protocol in a role of master node (row 1). The whole group of neighbours (the master node and all its neighbours) allocate 12 memory registers for the amplification run with this particular master node (row 3). The memory slots of the neighbours involved (for the same master node) are not cleared between the protocol executions with different slave nodes. This enables the group-oriented protocol to propagate key updates among a group of neighbours. This requirement results in total memory registers to be allocated by every node in the network.
The master node selects iteratively the slave nodes from its neighbours (row 4). The slave node provides a list of distances from all its neighbours to the master node (row 5). Based on the actual deployment of nodes, parties of the protocol are replaced by real identification of the nodes that are positioned as close as possible to the relative identification given by master and slave nodes in the protocol (row 6). All participating nodes are informed by the master node about their roles in the protocol (row 7). Please note that one real node can be assigned multiple roles in case this node is the nearest one with respect to multiple relative distances. Multiple key updates are generated and shared within the group of participating nodes (rows 8-45). Finally, the link keys are updated among every pair of neighbours within the group of nodes participating in the protocol for particular master and slave nodes (row 46). Please note that the memory registers are not erased and all stored values could be used in the iteration with the next slave node.
| Protocol 2 Pseudocode of the GO Best protocol. |
![Sensors 19 05041 i002]() |
Appendix A.3. HD Final and HD Best Protocols
HD Final and HD Best are hybrid designed protocols requiring the involvement of the master node, the slave node, and intermediate nodes, 2 and 5 respectively. The number of intermediate nodes is the only difference between the two protocols. Removing 3 intermediate nodes from the HD Best protocol saves 6 messages in every protocol iteration for only a negligible drop of the success rate. The pseudocode of HD Final and HD Best protocols is provided in Protocols 3 and 4, respectively. We use the HD Best protocol as the reference protocol in the following paragraphs. Nonetheless, all statements hold also for the HD Final protocol. We assume that every node is aware of its neighbours and of the distances between the node and every neighbour before the protocol is executed. This is the same assumption as in the case of group-oriented protocols.
Every node executes the HD Best protocol in a role of the master node (row 1). The whole protocol is repeated three times (row 3). The master node selects iteratively slave nodes (row 4). Each slave node provides a list of distances from all its neighbours to the master node (row 5). Based on the actual deployment of nodes, parties of the protocol are replaced by real identification of the nodes that are positioned as close as possible to the relative identification given by master and slave nodes in the protocol (row 6). There is no requirement to inform intermediate nodes about their roles, as all the nodes only retransmit messages towards their destination.
Five key updates are generated for each combination of master and slave nodes. Every key update is generated by the master node and shared with the slave node through a different intermediate node. A detailed description of the process together with relative distances of intermediation nodes is provided in pseudocode rows 7–21. All five key updates are independent and the order of the delivery is not important. Master and slave nodes mutually confirm every received key update. The key updates are used to update the link key after the successful confirmation (row 22).
| Protocol 3 Pseudocode of the HD Final protocol. |
![Sensors 19 05041 i003]() |
| Protocol 4 Pseudocode of the HD Best protocol. |
![Sensors 19 05041 i004]() |
References
- Eschenauer, L.; Gligor, V.D. A key-management scheme for distributed sensor networks. In Proceedings of the 9th ACM Conference on Computer and Communications Security, Washington, DC, USA, 18–22 November 2002; pp. 41–47. [Google Scholar]
- Anderson, R.; Chan, H.; Perrig, A. Key infection: Smart trust for smart dust. In Proceedings of the 12th IEEE International Conference on Network Protocols, Berlin, Germany, 8 October 2004; pp. 206–215. [Google Scholar]
- Svenda, P.; Sekanina, L.; Matyas, V. Evolutionary design of secrecy amplification protocols for wireless sensor networks. In Proceedings of the Second ACM Conference on Wireless Network Security, Zurich, Switzerland, 16–19 March 2009; pp. 225–236. [Google Scholar]
- He, S.; Shin, K.G. Steering crowdsourced signal map construction via Bayesian compressive sensing. In Proceedings of the IEEE INFOCOM 2018—IEEE Conference on Computer Communications, Honolulu, HI, USA, 16–19 April 2018; pp. 1016–1024. [Google Scholar]
- Li, T.; Chen, Y.; Zhang, R.; Zhang, Y.; Hedgpeth, T. Secure crowdsourced indoor positioning systems. In Proceedings of the IEEE INFOCOM 2018-IEEE Conference on Computer Communications, Honolulu, HI, USA, 16–19 April 2018; pp. 1034–1042. [Google Scholar]
- Ostadal, R.; Svenda, P.; Matyas, V. On Secrecy Amplification Protocols. In Proceedings of the 9th International Conference on Information Security Theory and Practice, WISTP 2015, Crete, Greece, 24–25 August 2015; LNCS 9311. Springer: Berlin, Germany, 2015; pp. 3–19. [Google Scholar]
- Nemec, L.; Matyas, V.; Ostadal, R.; Svenda, P.; Palant, P.L. Evaluating Dynamic Approaches to Key (Re-) Establishment in Wireless Sensor Networks. Sensors 2019, 19, 914. [Google Scholar] [CrossRef] [PubMed]
- Nemec, L.; Ostadal, R.; Matyas, V.; Svenda, P. Entropy Crowdsourcing–Protocols for Link Key Updates in Wireless Sensor Networks. In Proceedings of the Cambridge International Workshop on Security Protocols, Cambridge, UK, 19–21 March 2018; Springer: Berlin, Germany, 2018; pp. 84–92. [Google Scholar]
- Liu, Z.; Ma, J.; Huang, Q.; Moon, S. Storage requirements for key distribution in sensor networks. In Proceedings of the 2nd International Conference on Sensor Technologies and Applications, Cap Esterel, France, 25–31 August 2008; pp. 631–638. [Google Scholar]
- Kim, Y.H.; Kim, M.H.; Lee, D.H.; Kim, C. A Key Management Scheme for Commodity Sensor Networks. In Proceedings of the 4th International Conference on Ad Hoc and Wireless Networks, Cancun, Mexico, 6–8 October 2005; Springer: Berlin, Germany, 2005; pp. 113–126. [Google Scholar]
- Liu, Z.; Ma, J.; Pei, Q.; Pang, L.; Park, Y. Key Infection, Secrecy Transfer, and Key Evolution for Sensor Networks. IEEE Trans. Wirel. Commun. 2010, 9, 2643–2653. [Google Scholar] [CrossRef]
- Cvrcek, D.; Svenda, P. Smart dust security-key infection revisited. In Electronic Notes in Theoretical Computer Science; Elsevier: Amsterdam, The Netherlands, 2006; Volume 157, pp. 11–25. [Google Scholar]
- Brameier, M.; Banzhaf, W. Linear Genetic Programming; Springer: Berlin, Germany, 2007. [Google Scholar]
- Smolka, T.; Svenda, P.; Sekanina, L.; Matyas, V. Evolutionary design of message efficient secrecy amplification protocols. In Genetic Programming; Springer: Berlin, Germany, 2012; pp. 194–205. [Google Scholar]
- Kopke, A.; Swigulski, M.; Wessel, K.; Willkomm, D.; Haneveld, P.T.K.; Parker, T.E.V.; Visser, O.W.; Lichte, H.S.; Valentin, S. Simulating wireless and mobile networks in OMNeT++ the MiXiM vision. In Proceedings of the 1st International Conference on Simulation Tools and Techniques for Communications, Networks and Systems & Workshops, Marseille, France, 3–7 March 2008; p. 71. [Google Scholar]
- Varga, A. Using the OMNeT++ discrete event simulation system in education. IEEE Trans. Educ. 1999, 42, 11. [Google Scholar] [CrossRef]
- Jurnecka, F.; Stehlik, M.; Matyas, V. Evaluation of key management schemes in WSN. In Security and Trust Management; Springer: Berlin, Germany, 2014; pp. 198–203. [Google Scholar]
- Ostadal, R.; Svenda, P.; Matyas, V. Attackers in Wireless Sensor Networks Will Be Neither Random Nor Jumping–Secrecy Amplification Case. In Proceedings of the International Conference on Cryptology and Network Security, Milan, Italy, 14–16 November 2016; Springer: Berlin, Germany, 2016; pp. 552–561. [Google Scholar]
- Stetsko, A.; Stehlik, M.; Matyas, V. Calibrating and comparing simulators for wireless sensor networks. In Proceedings of the 2011 IEEE 8th International Conference on Mobile Adhoc and Sensor Systems (MASS), Valencia, Spain, 17–22 October 2011; pp. 733–738. [Google Scholar]
- D’Ausilio, A. Arduino: A low-cost multipurpose lab equipment. Behav. Res. Methods 2012, 44, 305–313. [Google Scholar] [CrossRef] [PubMed]
- Levis, P.; Madden, S.; Polastre, J.; Szewczyk, R.; Whitehouse, K.; Woo, A.; Gay, D.; Hill, J.; Welsh, M.; Brewer, E.; et al. TinyOS: An operating system for sensor networks. In Ambient Intelligence; Springer: Berlin, Germany, 2005; pp. 115–148. [Google Scholar]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












