
Design and Analysis of Electronic Head Protector for Taekwondo Sports


Abstract
:1. Introduction
2. Materials and Methods
2.1. Robustness Testing
2.2. Sensor Placement
2.3. Classification of Impacts Using Second eHelmet Design
3. Results
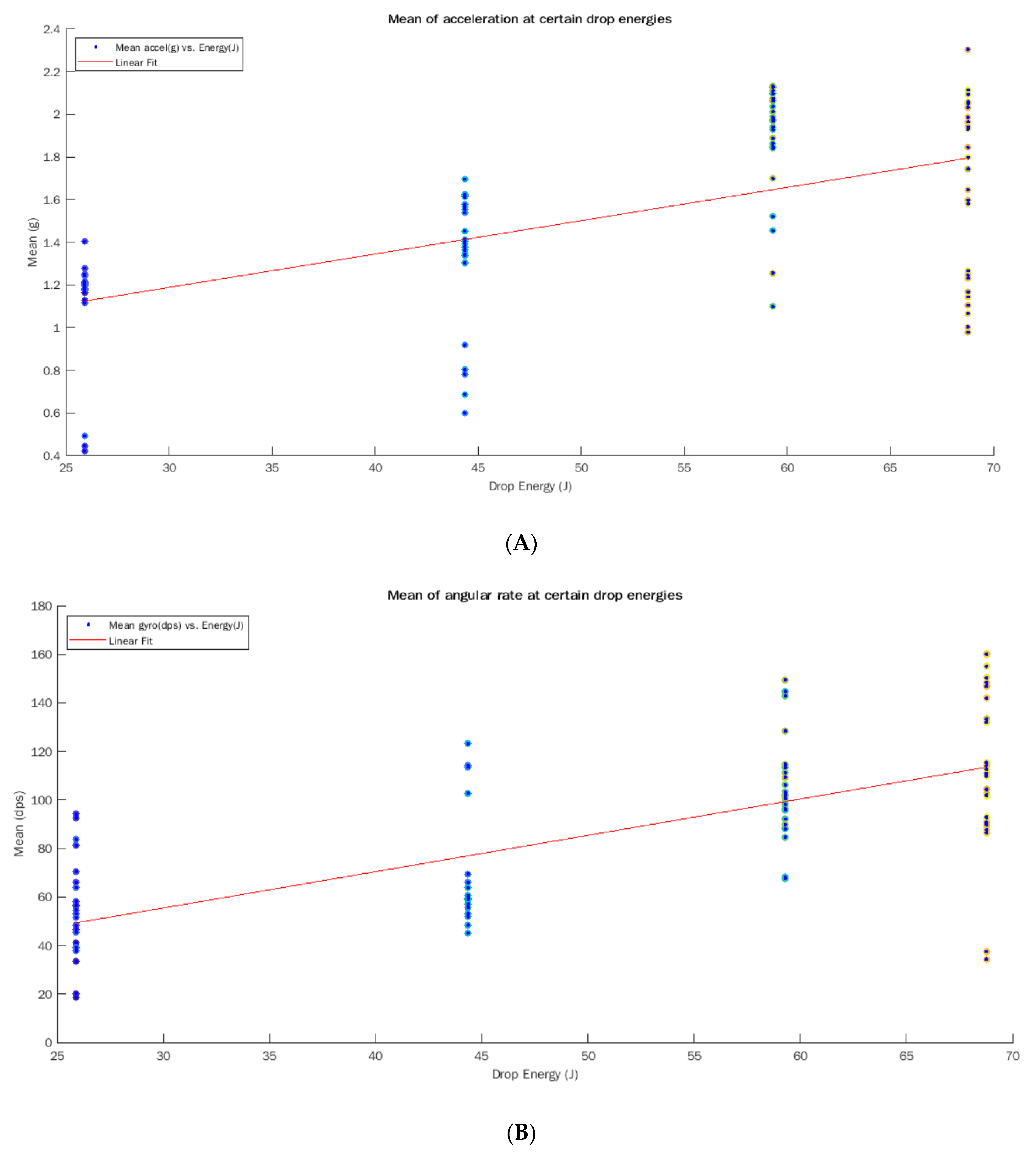
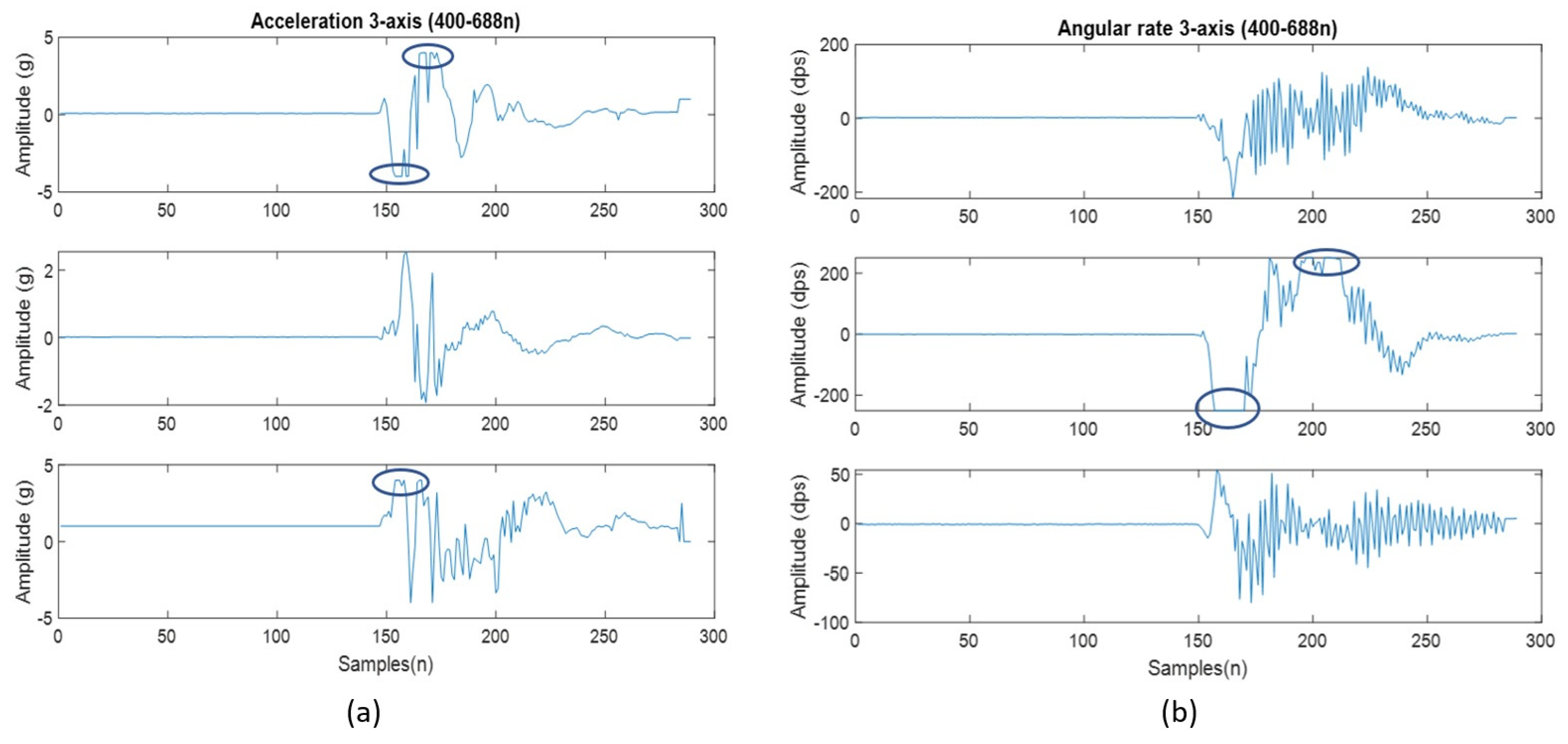
3.1. Robustness Testing
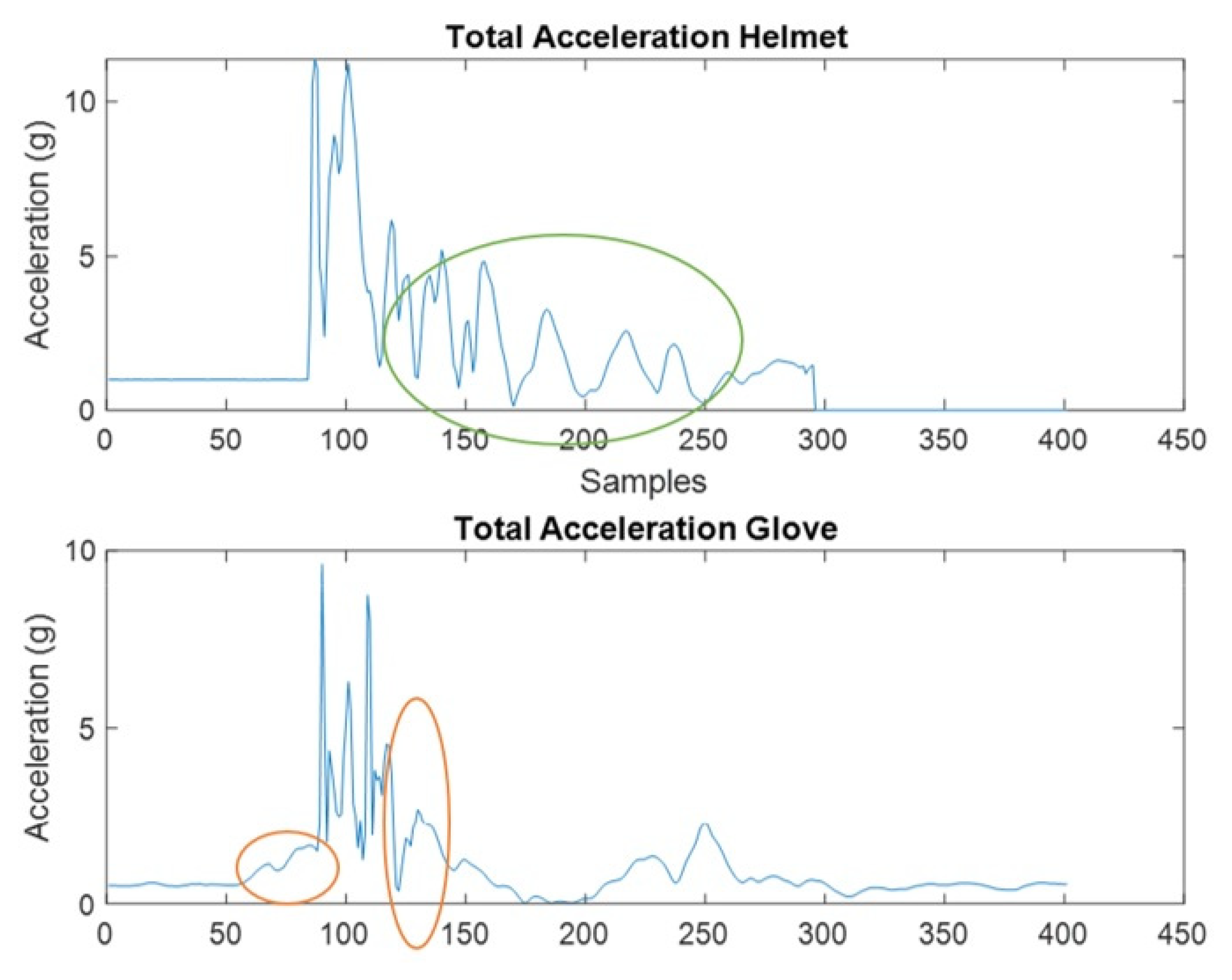
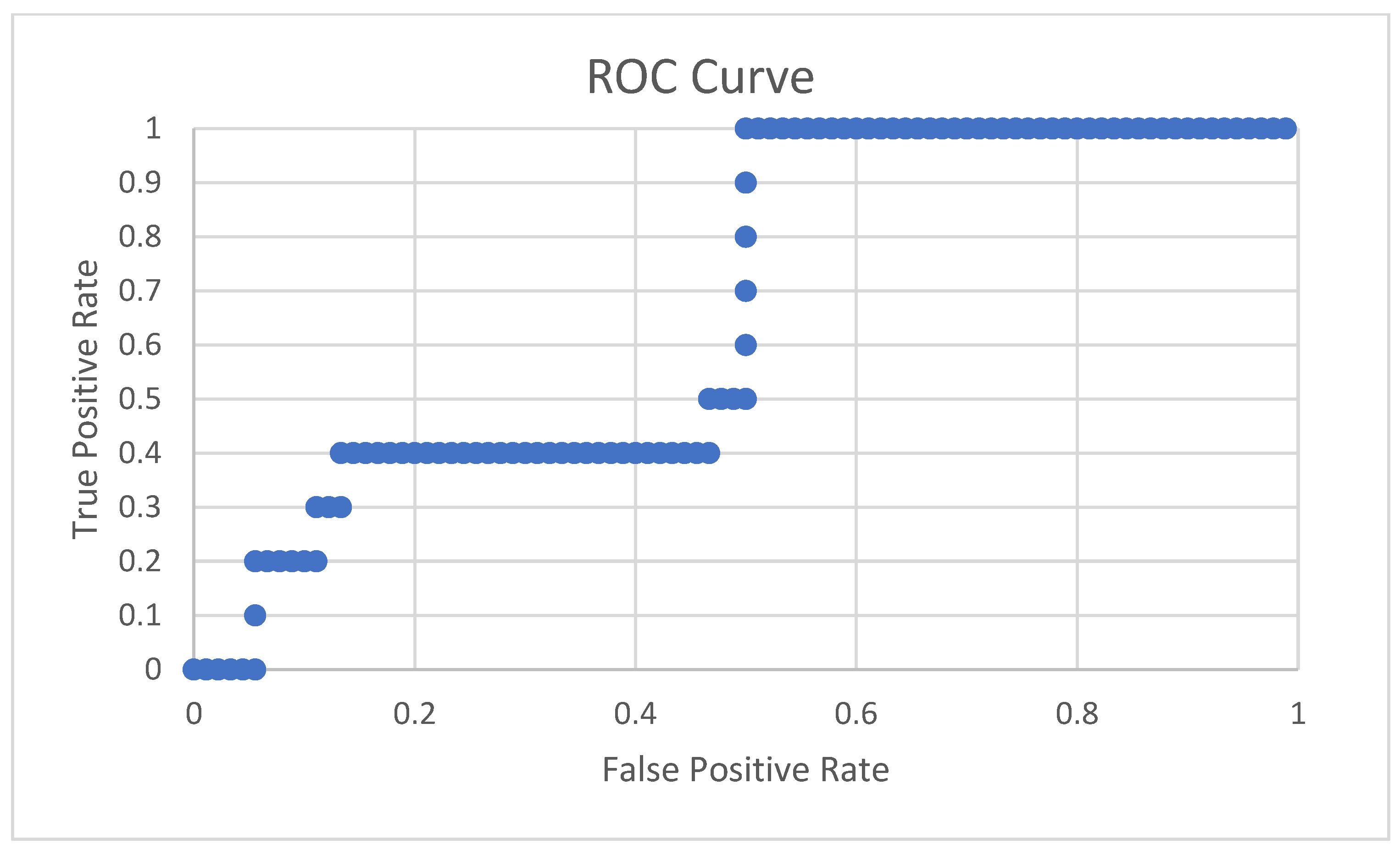
3.2. Classification of Impacts
4. Discussion
4.1. Robustness Testing
4.2. Sensor Placement
4.3. Classification of Impacts
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chi, E.H. Introducing Wearable Force Sensors in Martial Arts. IEEE Pervasive Comput. 2005, 4, 47–53. [Google Scholar] [CrossRef]
- Bashar, A.A.; Osama, A.F. The Most Common Taekwondo Kicks using the eShield at the 23rd Asian Taekwondo Championships, Vietnam 2018. Eur. Sci. J. 2018, 14, 27. [Google Scholar] [CrossRef]
- World Taekwondo Federation. Available online: http://www.worldtaekwondo.org/development/thf/ (accessed on 11 March 2020).
- Falco, C.; Estevan, I.; Veiten, M. Kinematical analysis of five different kicks in Taekwondo. Port. J. Sport Sci. 2011, 11, 219–222. [Google Scholar]
- Ko, Y.J.; Cattani, K.; Chang, Y. Do spectators and competitors accept the use of scroing technology in Taekwondo competitions? Int. J. Sport Manag. Mark. 2011, 9, 238–253. [Google Scholar] [CrossRef]
- Yong, J.K.; Chattani, K.; Lee, S.A.; Kim, T.H.; Yang, J.B.; Kim, Y.B. Consumer Satisfaction and Event Quality Perception: A Case of the 2009 World Professional Taekwondo Tour. J. Intern. Assoc. Taekwondo Res. 2014, 1, 22–33. [Google Scholar] [CrossRef]
- Yong, J.K.; Yu, K.K.; Min, K.K.; Jeoung, H.L. The role of involvement and identificaton on event quality perceptions and satisfaction: A case of US Taekwondo Open. Asia Pac. J. Mark. Logist. 2010, 22, 25–39. [Google Scholar] [CrossRef]
- Media Kit for 2016 Rio Olympics. Available online: http://www.worldtaekwondo.org/rio2016/Media_Kit_for_Rio_2016_Olympics.pdf (accessed on 11 February 2020).
- Leveaux, R. 2012 Olympic Games Decision Making Technologies for Teakwondo Competition. Commun. IVIMA 2012, 2012, 1–8. [Google Scholar] [CrossRef]
- Cometition Rules and Interpretation. 2018. Available online: http://www.worldtaekwondo.org/wp-content/uploads/2018/06/Revision-WT-Competition-Rules-Interpretation-Hammamet-040520181.pdf (accessed on 11 February 2020).
- Captain Sports (Adidas Offical Distributor). Available online: https://captainmartialarts.com/collections/adidas-kp-p-pss-system (accessed on 11 February 2020).
- Worsey, M.; Espinosa, H.; Shepherd, J.; Thiel, D. Inertial Sensors for Performance Analysis in combat Sports: A systematic Review. Sports 2019, 7, 28. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- TKDSCORE Daedo. Available online: https://www.tkdscore.com/29.html (accessed on 11 March 2020).
- Protective Equipment for Martial Arts—Part 3: Additional Requirments and Test Methods for Trunk Protectors. Available online: https://shop.bsigroup.com/ProductDetail/?pid=000000000030353124&_ga=2.39256291.1322126515.1573408589-1462521372.1573408589 (accessed on 11 March 2020).
- Application Note (LSM6DS3: Always-on 3D Accelerometer and 3D Gyroscope). Available online: https://www.st.com/content/ccc/resource/technical/document/application_note/12/98/b4/44/a5/bf/4e/c5/DM00157511.pdf/files/DM00157511.pdf/jcr:content/translations/en.DM00 (accessed on 11 March 2020).
- LSM6DS3: iNEMO Inertial Module: Always on 3D Accelerometer and 3d Gyroscope. Available online: https://www.st.com/resource/en/datasheet/lsm6ds3.pdf (accessed on 11 February 2022).
- Century Fitness BOB Body Opponent Bag—Body and Base—XL. Available online: https://www.amazon.ca/Century-Fitness-BOB-Body-Opponent/dp/B07K7WYMFJ/ref=asc_df_B07K7WYMFJ/?tag=googleshopc0c-20&linkCode=df0&hvadid=292968023235&hvpos=1o4&hvnetw=g&hvrand=43901754 (accessed on 11 March 2020).
- di Gironimo, G.; Caporaso, T.; del Giudice, D.M.; Lanzotti, A. Towards a New Monitoring System to Detect Illegal Steps in Race-Walking. Int. J. Interact. Des. Manuf. (IJIDeM) 2017, 11, 317–329. [Google Scholar] [CrossRef] [Green Version]
- Mouze-Amady, M.; Horwat, F. Evaluation of Hjorth parameters in forearm surface EMG analysis during an occupational repetitive task. Electroencephalogr. Clin. Neurophysiol./Electromyogr. Mot. Control. 1996, 101, 181–183. [Google Scholar] [CrossRef]
- Caporaso, T.; Grazioso, S. Iart: Inertial assistant referee and trainer for race walking. Sensors 2020, 20, 783. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- ASTM F2397-18; Standard Specification for Protective Headgear Used in Compative Sports. ATSM International: West Conshohocken, PA, USA, 2018. [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acceleration range (g) | ±2–±16 |
| Angular rate range (dps) | ±125–±2000 |
| Output data rate (kHz) | 12.5–6.66 |
| Power consumption | 425 μA–1.25 mA |
| Buffer size (kbyte) | 8 |
| Temperature range (°C) | −40–+85 |
| Dimensions (mm) | 2.5 × 3 × 0.83 |
| Linear Acceleration Sensitivity | ±0.06–±0.488 mg/LSB |
| Linear Angular rate Sensitivity | 4.375–70 mdps/LSB |
| a | |
| Master Level Trainer | |
| Age | 43 y |
| Height | 165 cm |
| Weight | 150 kg |
| Level | Master |
| Experience | 25+ y |
| Trainee | |
| Age | 25 y |
| Height | 187 cm |
| Weight | 90 kg |
| b | |
| Punches | |
| Forehead | 10 |
| Right of head | 15 |
| Left of head | 15 |
| Face | 10 |
| Kicks | |
| Roundhouse kick | 25 |
| Back Kick (turning) | 25 |
| Drop Energies (Joules) | 29.5 | 44.5 | 59.3 | 69.8 |
| Accelerometer Grand Mean (G) | 1.12 | 1.33 | 1.88 | 1.65 |
| Gyroscope Grand Mean (dps) | 54.35 | 65.96 | 105.05 | 113.81 |
| R2 Accelerometer | 0.35 | |||
| R2 Gyroscope | 0.49 | |||
| Root Mean Square Error Accelerometer | 0.35 | |||
| Root Mean Square Error Gyroscope | 25.3 | |||
| Helmet | Glove | ||
|---|---|---|---|
| Accelerometer | Accelerometer | ||
| Mean Activity | 2.4456 | Mean Activity | 0.9354 |
| Mobility | 0.0940 | Mobility | 0.2565 |
| Complexity | 8.7101 | Complexity | 4.8710 |
| Gyroscope | Gyroscope | ||
| Mean Activity | 11149 | Mean Activity | 1185 |
| Mobility | 0.0013 | Mobility | 0.0029 |
| Complexity | 18.5463 | Complexity | 21.5926 |
| a | ||
| Class 1 (Legal) | Class 2 (Illegal) | |
| Class 1 | 45 (TP) | 5 (FP) |
| Class 2 | 5 (FN) | 45 (TN) |
| Sensitivity 90% | Specificity 90% | |
| b | ||
| Miss Rate | 10% | |
| False positive Rate | 10% | |
| Positive Predicted Value | 90% | |
| Negative Predicted Value | 90% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qureshi, F.; Krishnan, S. Design and Analysis of Electronic Head Protector for Taekwondo Sports. Sensors 2022, 22, 1415. https://doi.org/10.3390/s22041415
Qureshi F, Krishnan S. Design and Analysis of Electronic Head Protector for Taekwondo Sports. Sensors. 2022; 22(4):1415. https://doi.org/10.3390/s22041415
Chicago/Turabian StyleQureshi, Fayez, and Sri Krishnan. 2022. "Design and Analysis of Electronic Head Protector for Taekwondo Sports" Sensors 22, no. 4: 1415. https://doi.org/10.3390/s22041415