1. Introduction
The railway wheelset plays a vital role in railway transportation, ensuring the safe and comfortable operation of the vehicles. The conical shape of the wheel tread is designed to maintain optimal performance. However, excessive traction and braking forces at the wheel–rail interface can cause the wheel’s exterior perimeter to deviate from its desired conical shape. This either results in a flat or more conical surface of the wheel tread. This deviation leads to increased vibrations, noise, and a decrease in ride comfort and operational safety. Moreover, wheel defects contribute to the accelerated growth of cracks on the rail tracks, ultimately leading to premature failure of the rail system [
1]. Statistical analysis of mechanical components of trains between 2004 and 2007 revealed that wheelset faults accounted for 44.7% of train accidents, making them the most significant cause [
2]. Therefore, early detection of defective wheels is crucial. To achieve this, an automated approach capable of accurately distinguishing between healthy and damaged wheels needs to be developed. Consequently, there is a great interest among railway administrations and rolling stock operators in finding effective methods for early detection and identification of wheel flats [
3].
Rolling stock inspection is normally performed at fixed intervals and carried out periodically in workshops. Periodic inspection is expensive due to the unavailability of rolling stock during maintenance time. Moreover, it is also inefficient, which usually results in over- or under-maintenance of the components [
4]. In the last few decades, various techniques have been employed in the railway industry, and various monitoring approaches have been proposed to automatically inspect wheel conditions. Most of these techniques are based on the concept that the wheel–rail interaction forces increase in a defective wheel [
5,
6]. The most popular techniques which have gained plenty of attention from railway researchers are the onboard techniques and wayside measurement techniques [
7].
The wayside inspection involves the installation of various sensors along the railway track at specific locations, allowing for the evaluation of all passing wheels [
8,
9]. These techniques utilize vibration, acoustic, image detection, and ultrasonic technologies to monitor the condition of the trains [
10,
11,
12]. Hot axle box detectors (HABDs) are commonly employed in wayside monitoring systems to identify faulty overheating axle bearings by using thermal imaging. However, HABDs are unable to detect damage at early stages, as minor faults do not typically cause a noticeable increase in temperature. Additionally, HABDs are prone to false alarms triggered by environmental conditions [
13]. Trackside acoustic array detectors (TAADS) utilize arrays of microphones to capture the audible noise produced by passing axle bearings. However, the operating frequency range of these microphones (normally 22–44 kHz) makes them susceptible to errors resulting from background noise [
14]. To enhance the accuracy of detection, many modern wayside monitoring systems incorporate machine learning and deep learning algorithms [
5,
15]. For example, in [
5], a multi-sensor data fusion approach combined with an unsupervised early damage detection methodology has been proposed, capable of automatically distinguishing between defective and healthy wheels, particularly considering small flat sizes. This methodology relies on the evaluation of acceleration and shear time histories recorded on the rails during the passage of traffic loads. In [
15], an improved YOLOv3 framework is developed for rail wheel surface defect detection, achieving classification detection of four types of wheel tread defects with an average mean average precision (MAP) accuracy of 0.92. Various types of sensors, including strain gauges and accelerometers, are utilized to capture input signals for detecting wheel flats.
However, wayside monitoring systems are often costly due to the requirement for multiple sensors and high-end computing capabilities for comprehensive diagnosis and effective wheel condition monitoring. For instance, in the Swedish railway network, the wayside equipment for monitoring rolling stock consists of almost 200 wayside inspection devices [
16]. Moreover, this method also requires detailed information about a target vehicle (e.g., number of axles and type of wagon) for accurate condition monitoring [
17]. The high cost and maintenance issues associated with this method limit its widespread use. Additionally, the deployment and security of wayside equipment are important considerations that need to be addressed.
Due to the challenges associated with wayside monitoring techniques, several onboard techniques have been proposed in the literature [
18,
19,
20,
21,
22,
23]. One such technique, presented in [
10], detects wheel flat defects by measuring the vertical acceleration on the axle box. This algorithm operates in the time domain and can identify the presence of wheel flats at an early stage and estimate their severity. The results demonstrate that the proposed wheel flat index is effective for detecting small flats and estimating their severity. In [
18], multiple models and a fuzzy logic-based technique are introduced for detecting conicity in railway wheelsets. This method indirectly identifies the conicity condition by analyzing the lateral acceleration of the wheelset. Another onboard detection method proposed in [
7], known as the angle domain synchronous averaging technique (ADSAT), utilizes vertical axle-box vibration acceleration (ABVA) to monitor the conditions of axle-box bearings. The results indicate that this method not only achieves better detection than traditional methods but also mitigates the influence of background noise. In [
19], a lightweight 1D convolutional neural network (CNN) architecture, guided by Bayesian optimization, is presented for wheel flat (WF) detection using car body accelerations. Additionally, model-based onboard techniques are proposed in [
20,
21,
22,
23] to detect wheelset conditions under different environmental conditions, utilizing axle vibration and gyroscopic data for onboard diagnosis.
The advantage of on-board monitoring systems is that the wheel is monitored continuously and not only when the vehicle passes a trackside monitoring site. This allows for the timely detection of emerging wheel defects [
10], thus, allowing immediate action to perform maintenance after the formation of a wheel flat, without requiring a visit to a trackside monitoring site [
10,
24]. Furthermore, if the onboard monitoring system provides positioning, the occurrence of a wheel defect can be linked to a position on the track. The track at this position can then be inspected and, in cases where a track defect is identified, appropriate maintenance actions can be issued to avoid further damage to the rail and other passing vehicles [
24]. The early detection of wheel flats can also be correlated with braking occurrences, if the braking system is monitored, to develop strategies for reducing their frequency [
25]. However, onboard detection methods require equipping all wheels with sensors for comprehensive diagnosis and effective wheel condition monitoring, which can be costly and pose maintenance challenges.
Onboard detection techniques face a substantial challenge due to the presence of diverse vibrations originating from multiple sources within the railway system. These vibrations, generated by the track, traction motors, and various rolling stock subsystems, introduce significant complexity and pose obstacles to the accurate identification of wheel defects in real-time during operational activities [
7,
26]. The intricate nature of these vibrations makes it difficult to distinguish between genuine wheel defects and false alarms, leading to potential disruptions and unnecessary maintenance interventions. Addressing the challenge of vibration interference requires innovative approaches that can effectively separate the signals related to wheel defects from the surrounding vibrations. By employing machine learning algorithms, it becomes possible to enhance the accuracy of onboard detection systems and mitigate the impact of background vibrations. These techniques aim to extract relevant features and patterns associated with wheel defects, enabling reliable and real-time identification even in the presence of complex vibration environments [
27].
This paper presents a novel technique to address the challenges faced by onboard techniques. The proposed technique utilizes axle vibration data exclusively, thereby reducing the reliance on multiple sensors. Moreover, the proposed technique incorporates a hybrid deep learning approach, which plays a crucial role in mitigating the influence of background vibrations. The utilization of hybrid deep learning algorithms allows for enhanced detection performance by effectively distinguishing between genuine wheel defects and the vibrations induced by the track, traction motors, and other rolling stock subsystems. By harnessing the power of deep learning, the proposed technique aims to overcome the limitations and false alarms commonly encountered in onboard detection systems.
A significant novelty of this research is the automatic detection of defective wheels at a very early stage, representing a substantial improvement in the effectiveness of the proposed method and facilitating its full implementation in real-world applications. The research work’s key contributions are as follows:
- (a)
Development of a realistic simulation model of the railway wheelset to generate a comprehensive dataset.
- (b)
Evaluation of the effectiveness of the proposed method considering a minimalist layout of sensors.
- (c)
Enhancement of wheel flat detection through the application of hybrid deep learning technique.
2. Methodology
The methodology section of this research paper outlines the approach used to develop a deep learning model for the detection of defects on railway wheelsets using vibration measurements. This section describes the data collection process, the deep learning architecture employed, the training procedure, and the model evaluation methodology. By leveraging the inherent capabilities of deep learning, the proposed methodology aims to automatically learn relevant features directly from the raw vibration measurements, eliminating the need for explicit feature extraction. The following subsections provide a detailed overview of the methodology, highlighting the steps taken to train and evaluate the deep learning model accurately.
2.1. Development of a Realistic Simulation Model
A nonlinear wheelset simulation model presented in [
21,
22,
23,
28] is used to develop the simulation model in Simulink to mimic the behavior of the actual wheelset dynamics. The model is modified to consider all the disturbances that are faced by an actual railway vehicle (e.g., irregularities in track in the lateral direction, variation in gauge and track geometry) to generate data that are close to real-time scenarios. Only the lateral and yaw dynamics of the system are considered, which are most affected by the wheel defects. The model is described in Equations (1)–(5).
The simulations are in different conditions to develop a comprehensive dataset. The following scenarios are considered in the development of the dataset.
Variation in speed
): In previous similar studies [
18,
19,
20,
21,
22,
23,
24] speed was kept constant to detect the anomalies. However, in real-time scenarios, speed is not constant. Therefore, in this study, data are generated at variable speeds (25 km/h, 50 km/h, 75 km/h, 100 km/h, 120 km/h, and 150 km/h).
Variation in track conditions: Track condition also changes with time and location. Therefore, the data are generated by varying the track parameters ().
Variation in wheelset condition: Wheel profile plays an important role in the safe and reliable operation of railway vehicles. Due to wear and tear during the operation wheel profile is changed. The variation in the wheel profile is incorporated during the simulation by varying wheel conditions ().
Track disturbances: The creep forces generated at the wheel–rail interface are directly affected by the track irregularities, such as lateral variation and variation in gauge. Therefore, these disturbances are also considered in this study.
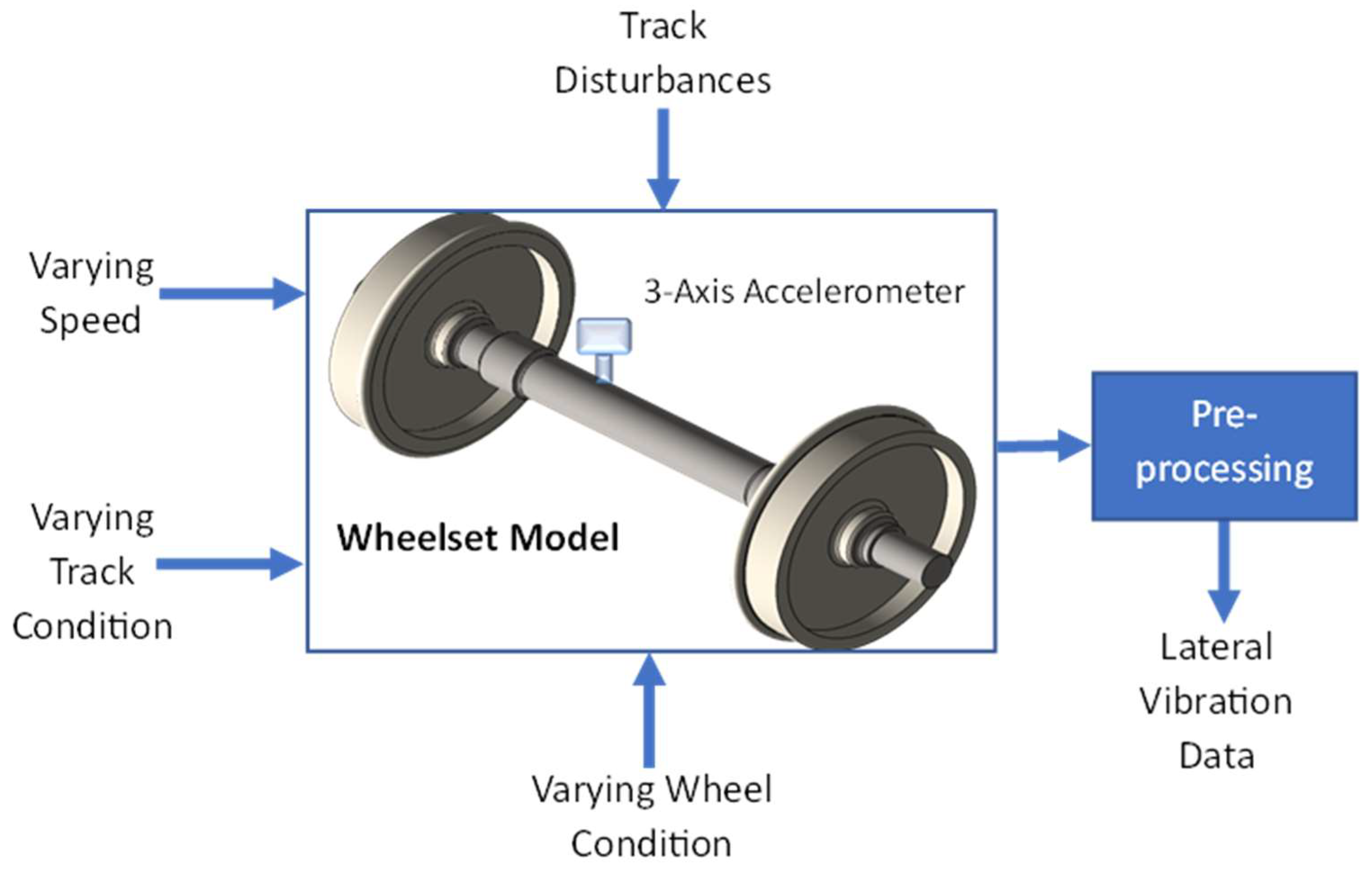
The data collection process is depicted in
Figure 1. A simulation model of a nonlinear railway wheelset is developed in MATLAB/Simulink. Varying forward speed, varying wheel conditions, and varying track conditions are given as input to the model. Practically, a 3-axis accelerometer is placed on the left side of the axle (opposite side of the traction motor) to measure axle vibration. A preprocessing unit is used to remove any bias in the vibration data and to extract vibrations in lateral direction. Simulations are run for 20 s in each of the scenarios, including one non-faulty scenario and six faulty scenarios, to develop the dataset. Some of the results are given in
Figure 2. It is quite evident from
Figure 2 that the frequency and the amplitude of the lateral acceleration are directly affected by the changes in the speed as well as by the wheel profile variation. An accelerometer is placed on the axle of the wheelset to capture lateral vibrations during the simulation process. A total of 200,000 data points are generated in each scenario which is archived in CSV format for later use.
2.2. Hybrid Detection Architecture
The overall block diagram for defect detection is shown in
Figure 3. The defect detection architecture proposed in this research paper combines an MLP as a feature extractor with a machine learning model for the final classification of conicity values. The input features used in this architecture are derived from vibration data only. This is one of the main contributions of this work because in the presence of disturbances and variable parameters it is difficult to detect wheel defects using vibration data only.
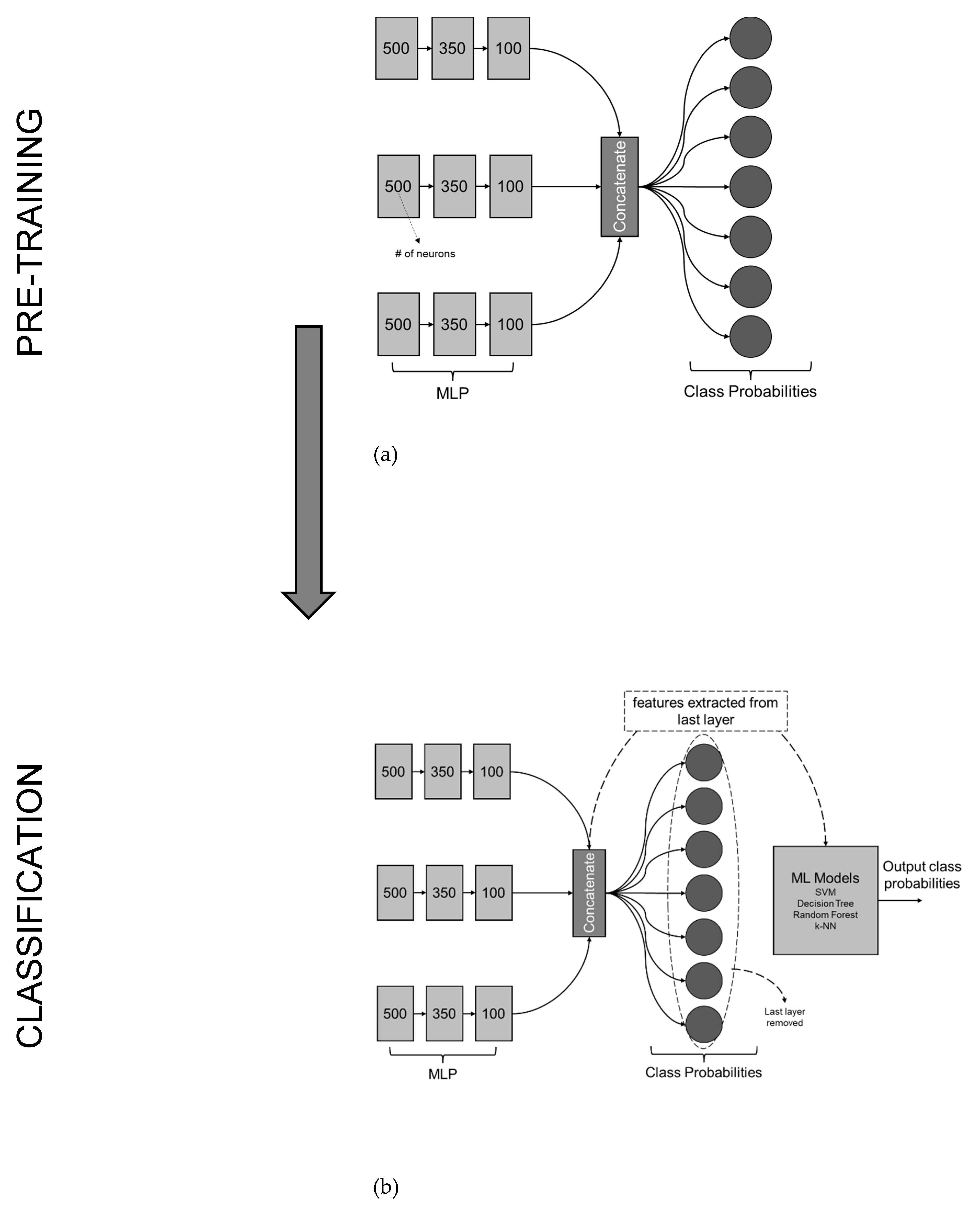
To ensure effective feature extraction, the MLP undergoes a pre-training phase, as shown in
Figure 4a. During pre-training, the model is initialized with appropriate weights and biases, enabling it to extract meaningful patterns from the input data. This initialization process sets a foundation for the MLP to learn and capture relevant features that are crucial for accurate defect detection in railway wheelsets.
2.3. MLP—Fully Connected Network
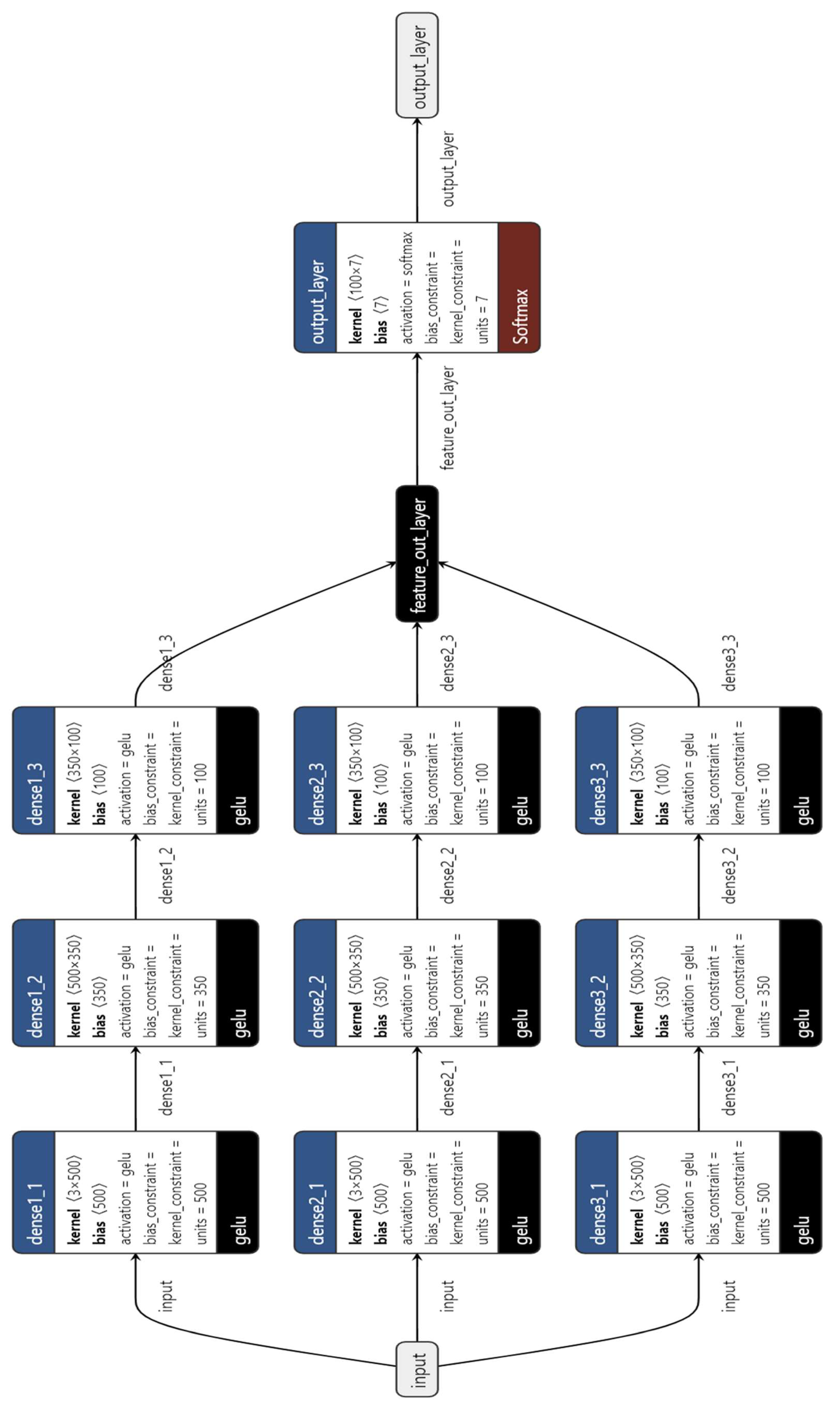
The model presented in this research paper is designed for defect detection in railway wheelsets using vibration data. The architecture, shown in
Figure 5, consists of an MLP as a feature extractor and a subsequent machine-learning model for the final classification of conicity values. The feature extraction process begins with the MLP, which includes three parallel dense networks. Each network has multiple dense layers with decreasing numbers of units, incorporating the GELU activation function. Regularization is applied to the first dense layer of the first parallel network using a kernel regularizer.
During training, the model is initially pre-trained to initialize the weights and biases. This pre-training step helps the MLP extract meaningful patterns from the vibration data, facilitating effective feature extraction. Once the MLP is pre-trained, the last classification layer is removed. Instead, the layer where the outputs of all three branches are concatenated is used to extract the features learned by the MLP. This concatenated layer combines the features extracted from each parallel network with the input layer, providing a comprehensive representation of the input data. A training summary of the MLP is given in
Table 1.
These extracted features serve as the inputs to the subsequent machine learning model, which performs the final classification of conicity values. The machine learning model utilizes the extracted features to make accurate predictions regarding the severity of defects in railway wheelsets. By removing the last classification layer and extracting features from the concatenated layer, the model focuses on capturing and utilizing the learned representations of the input data. This approach enhances the effectiveness of defect detection by leveraging the discriminative power of the extracted features for classification purposes.
2.4. Hyperparameters
The details of the hyperparameter are given in
Table 2. The model uses a Gaussian error linear unit (GELU) as an activation function with a categorical cross-entropy loss function and Adam optimizer.
2.4.1. GELU Activation Function
The GELU activation function outperforms ReLU in the presented architecture due to its smoothness, improved representation learning capabilities, and ability to alleviate the vanishing gradient problem. These advantages enable more stable training, enhanced feature extraction, and improved accuracy in defect detection for railway wheelsets. The GELU activation function is defined as follows in Equation (6):
2.4.2. Categorical Cross Entropy Loss Function
Categorical cross entropy is utilized as the loss function for the final classification model. This choice is motivated by the nature of the defect detection task, where the goal is to classify conicity values into different categories or severity levels. Categorical cross entropy is well-suited for multi-class classification problems, providing a measure of the dissimilarity between the predicted conicity values and the true labels. By minimizing this loss function, the model is encouraged to accurately classify the severity of defects in railway wheelsets.
2.4.3. Adaptive Moment Estimation (ADAM) Optimizer
The ADAM optimizer is a widely used optimization algorithm for training neural networks. It offers several advantages that contribute to its popularity. ADAM utilizes adaptive learning rates, adjusting the learning rate for each parameter individually based on the gradients’ history. This adaptive nature allows for faster convergence and efficient parameter updates. The inclusion of momentum helps accelerate optimization by maintaining a running average of past gradients. ADAM also handles sparse gradients effectively, which is common in deep learning models. Additionally, it incorporates L2 regularization, preventing overfitting and improving generalization. Overall, these features make ADAM a versatile and effective optimizer for neural network training.
4. Conclusions
In conclusion, this research paper presents the implementation of a hybrid deep learning-based defect detection system. The system utilizes a multilayer perceptron (MLP) for feature extraction, which is pre-trained on collected data. Multiple machine learning models, including support vector machine (SVM), random forest (RF), decision tree (DT), and k-nearest neighbors (k-NN), are employed for classifying conicity target values. The performance of different models in detecting wheel defects was evaluated. The MLP model achieved an accuracy of 88.6% with balanced precision and recall. MLP-RF exhibited exceptional performance with high accuracy (99.0%), precision, recall, and F1 score. MLP-DT demonstrated strong performance with an accuracy of 98.9% and balanced precision and recall. MLP-kNN achieved a relatively high accuracy of 95.0% with good precision and recall. MLP-SVM showed moderate performance with an accuracy of 83.1%, relatively low recall, and moderate precision. Overall, the results indicate the effectiveness of MLP-RF, MLP-DT, and MLP-kNN in accurately detecting wheel defects, while MLP-SVM showed relatively lower performance.
These findings suggest the effectiveness of combining deep learning-based feature extraction with various machine learning models for accurate defect detection and classification. The achieved results highlight the potential of hybrid approaches in defect detection applications, showcasing the benefits of leveraging deep learning and traditional machine learning techniques in tandem. Future research can explore further enhancements to improve accuracy, explore different feature extraction methods, or investigate the applicability of the proposed system to other defect detection scenarios. One limitation of this study is the reliance on simulated data to train and evaluate the proposed model. While efforts have been made to create a realistic simulation model and generate comprehensive datasets, there may still be discrepancies between simulated data and real-world scenarios. It is important to validate the model’s performance using real-world data to ensure its effectiveness in practical applications.
To advance the field of defect detection and classification using hybrid deep learning methodologies, several avenues for future research can be explored. These include fine-tuning the pre-trained MLP model specifically for defect detection, investigating alternative deep learning architectures, such as CNNs or RNNs, and evaluating the effectiveness of data augmentation techniques. The integration of transfer learning and real-time implementation in real-time settings should also be considered. Additionally, validation on diverse datasets, deployment in real-time environments, and integration with automated decision-making systems are promising areas for further investigation. To achieve practical implementation, the proposed model can be effectively deployed on an edge computing platform. This deployment enables the real-time detection of wheel defects, providing prompt and accurate identification of any issues. By leveraging the computational capabilities of the edge computing platform, the model can efficiently process the incoming data from sensors and rapidly analyze them for the presence of wheel defects. This approach ensures that potential defects are promptly detected, and appropriate actions can be taken to maintain operational safety and efficiency in railway transportation.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}