
Low-Cost CO2 NDIR Sensors: Performance Evaluation and Calibration Using Machine Learning Techniques
 , , ,
, , ,
Abstract
:1. Introduction
2. Methodology
2.1. Measurement Site
2.2. Sensors
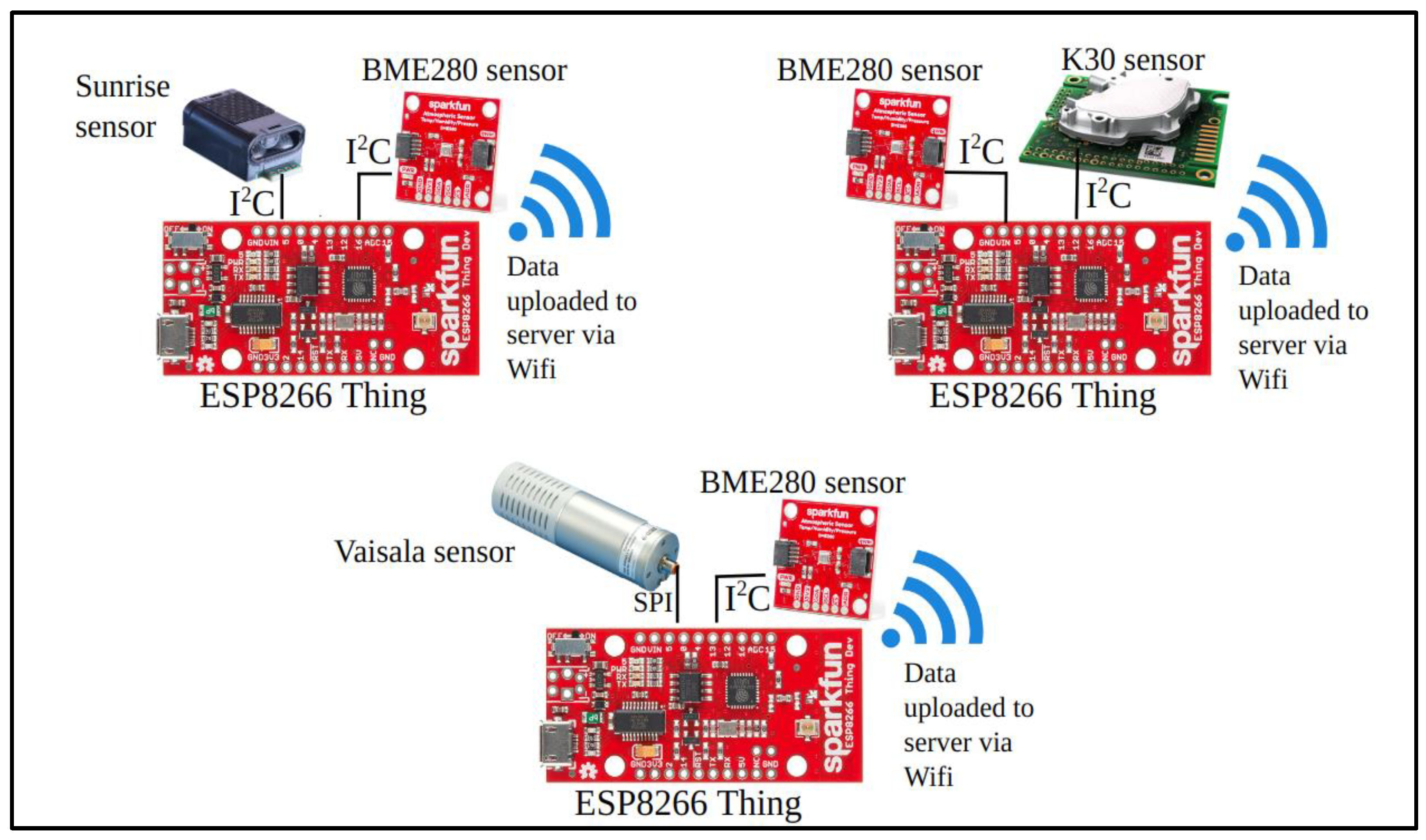
- Sunrise AB [23] is a miniature (33.5 mm × 19.7 mm × 11.5 mm, weight: 5 g; price ~60 USD) CO2 sensor that operates on ultra-low power (150 μA, 3.05–5.5 V). It has a measurement range of 400–5000 ppm and stated an accuracy of ±30 ppm or ±3% of the reading. The operation ranges for temperature and RH are 0–50 °C and 0–80%, respectively. The sensor costs ~55 USD and allows UART (Universal Asynchronous Receiver/Transmitter) and I2C (Inter-Integrated Circuit) as communication interface options.
- K30 [24] is a small (51 mm × 58 mm × 12 mm; price ~100 USD) CO2 sensor that has a detection range of 0 to 5000 ppm. The accuracy provided by the manufacturer is the same as that of the Sunrise sensor. The sensor supports UART and I2C. The temperature and RH operation ranges as per the manufacturer are 0–50 °C and 0–95%, respectively. The sensor requires a 4.5 to 14.0 V DC supply, and the average current consumption is rated at 40 mA.
- Vaisala [25] is a compact (194 mm × 55 mm × 55 mm, weight: 360 g; price ~3500 USD) CO2 sensor designed for outdoor use. It has an overall detection range of 0–5000 ppm. The stated accuracy is (±3 ppm + 1% of the reading) for 0–1000 ppm detection range, which makes it ~10 times more accurate than the K30 and Sunrise sensors. Vaisala also offers an IP66 rating, has a temperature operating range of −40 to +60 °C, and communication is over UART. The sensor requires an 11 to 36 V DC supply, and the power consumption varies between 1 W to 3.5 W based on the state of the optics.
2.3. Reference Instrument
2.4. Sensors Assembly
2.5. Experimental Setup
2.6. Data Processing and Performance Evaluation
2.7. Sensor Calibration Using Machine Learning
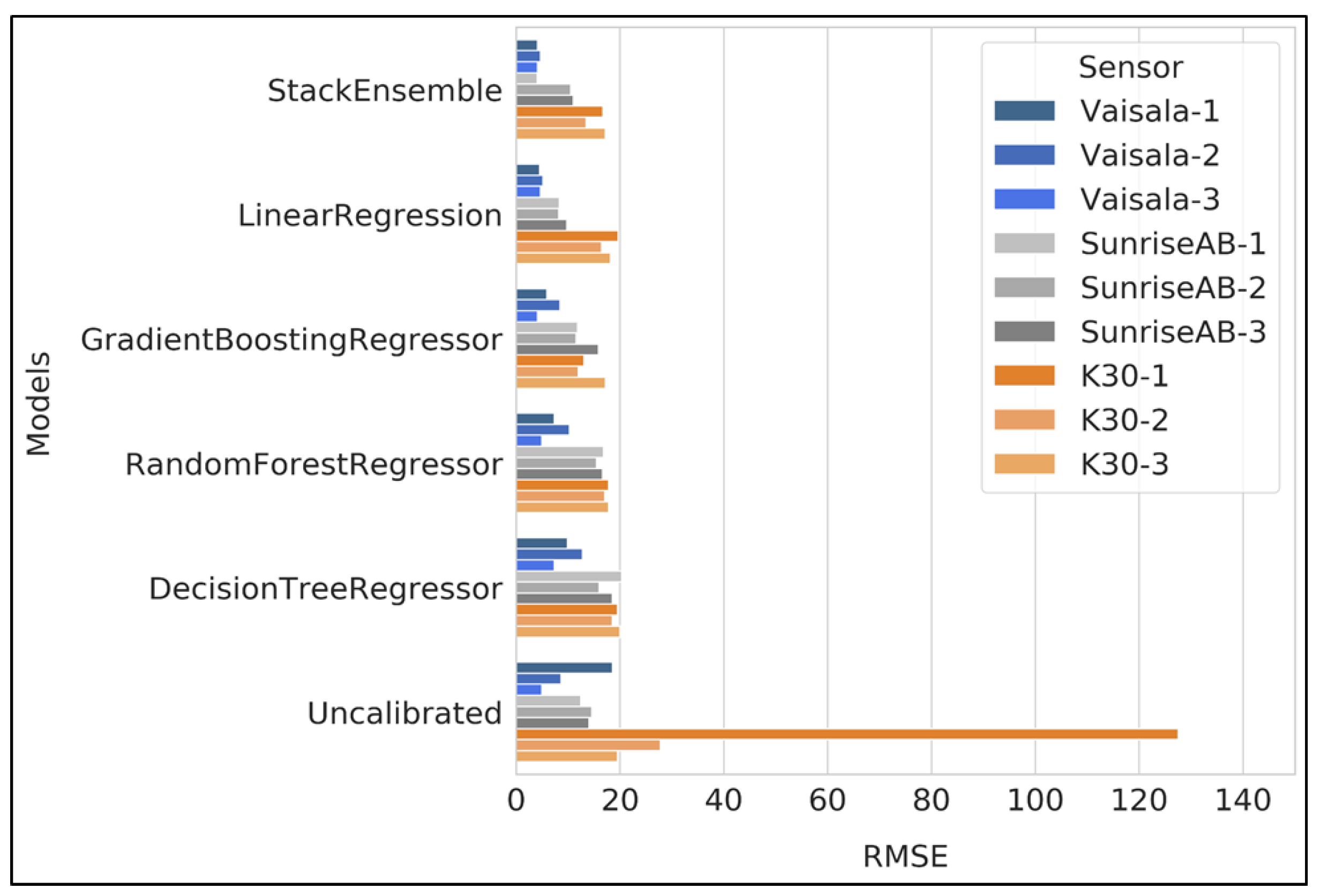
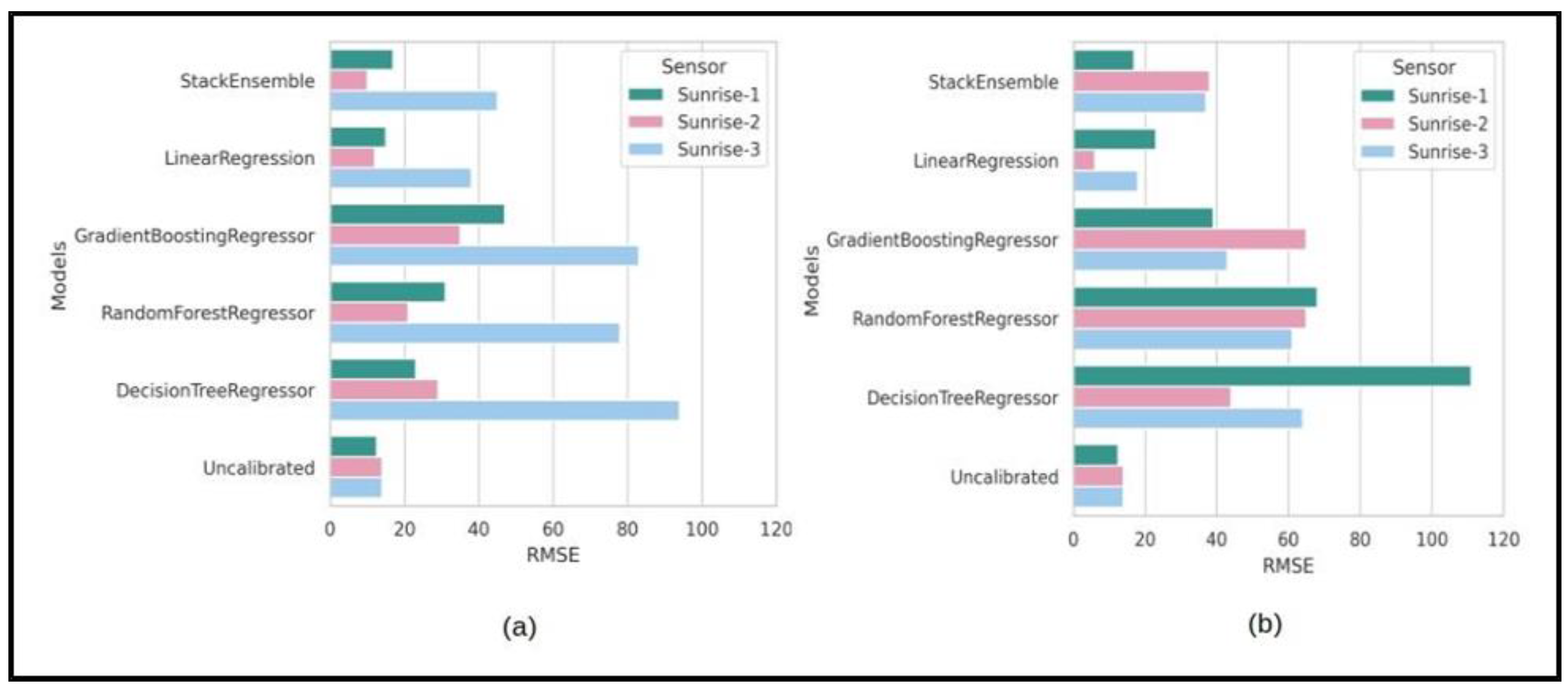
- Multiple linear regression: This is a classic statistical technique used to model the relationship between a dependent variable and multiple independent variables. Having very low computation requirements, this simple model assumes that there exists a linear relationship between the variables [31]. The model estimates coefficients to minimize the difference between predicted and actual values.
- Decision tree regression: This is a machine learning technique that involves splitting the whole dataset based on variables and features such that it forms tree-like structures. The predictions are made continuously by assigning a mean or weighted mean value to the leaf nodes of each tree. The model allows for intuitive interpretation. However, it may lead to overfitting if not clipped properly [32].
- Gradient boosting regression: This is an ensemble machine learning method that builds a predictive model by combining the predictions of multiple weak learners (typically decision trees) [33]. The model reduces errors by sequentially fitting new trees to the residuals of previous trees. The final prediction is a weighted sum of individual tree predictions and not a mere average of different decision trees, resulting in a robust and accurate regression model.
- Random forest regression: This is another ensemble machine learning technique that aggregates tree predictors that are random and independent from each other [34]. The final prediction is an average or weighted combination of individual tree predictions.
- Stacked ensemble model: A stacked ensemble is a machine learning technique that combines predictions from multiple base models by training a meta-model on their outputs [35]. As the name suggests, the base models can be stacked one over the other and the overall model can have different levels. For this study, we used linear regression, gradient boosting regression, and random forest regression as the base or level 0 models, followed by a linear regression model as the final model, i.e., level 1 model.
3. Results and Discussion
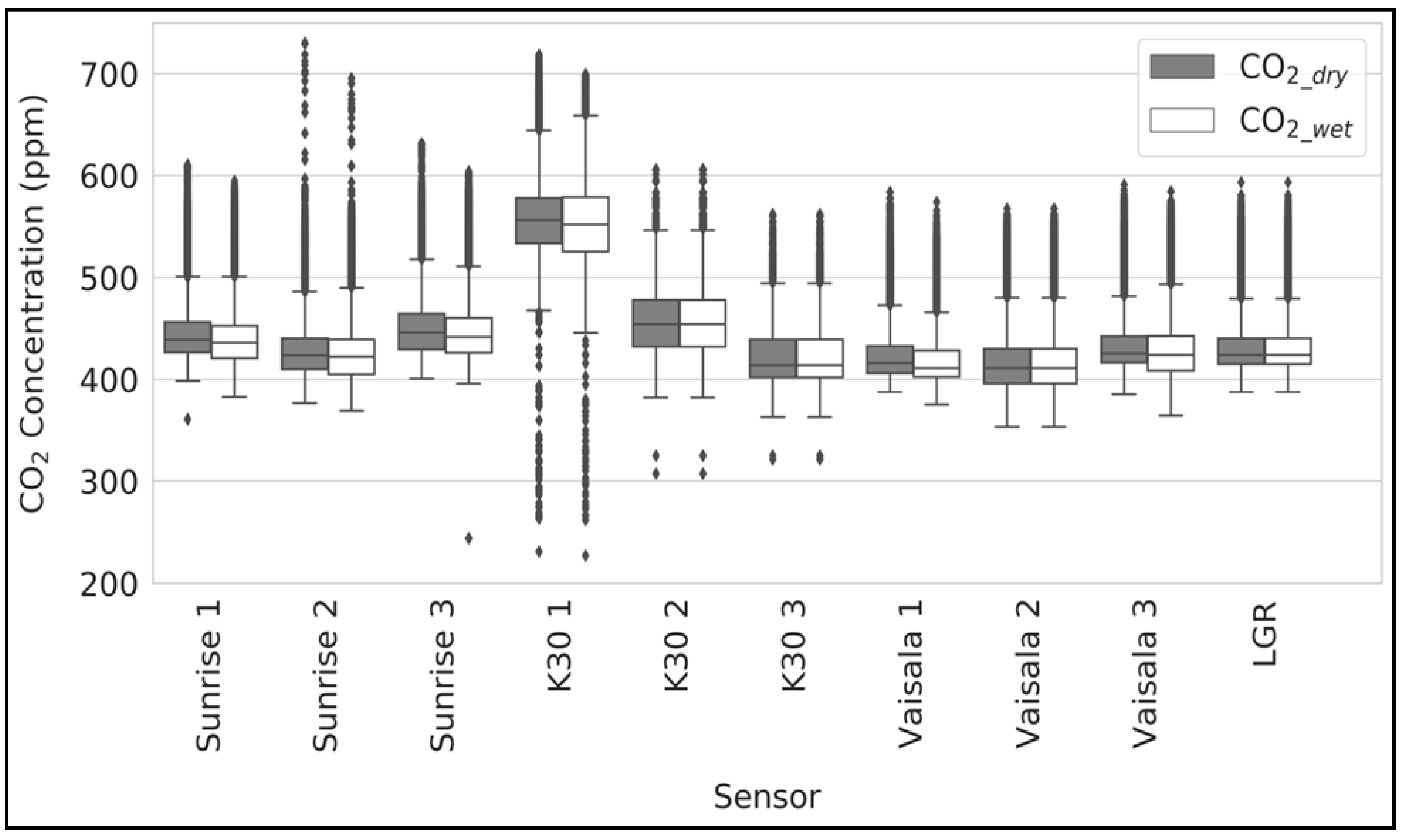
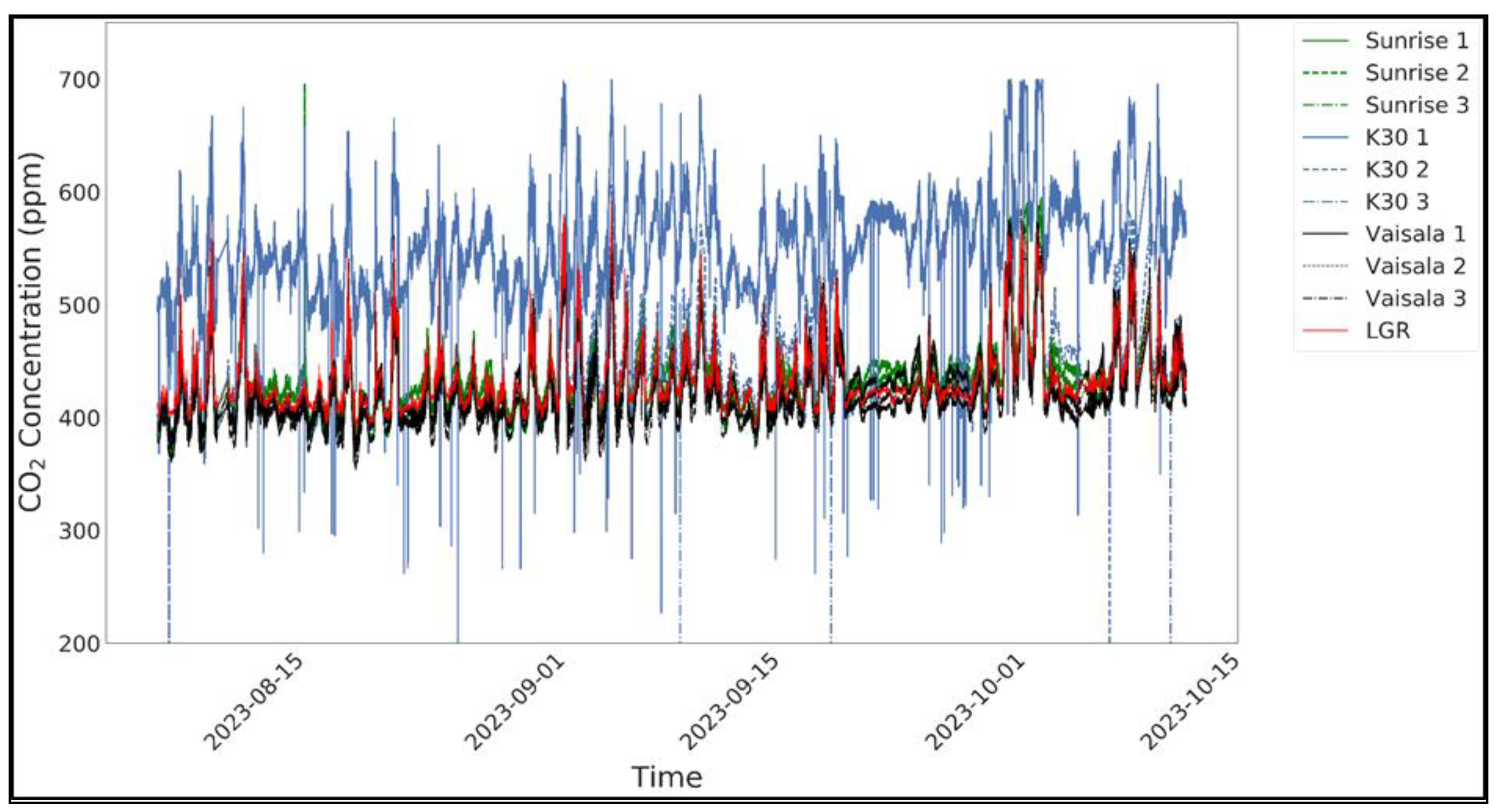
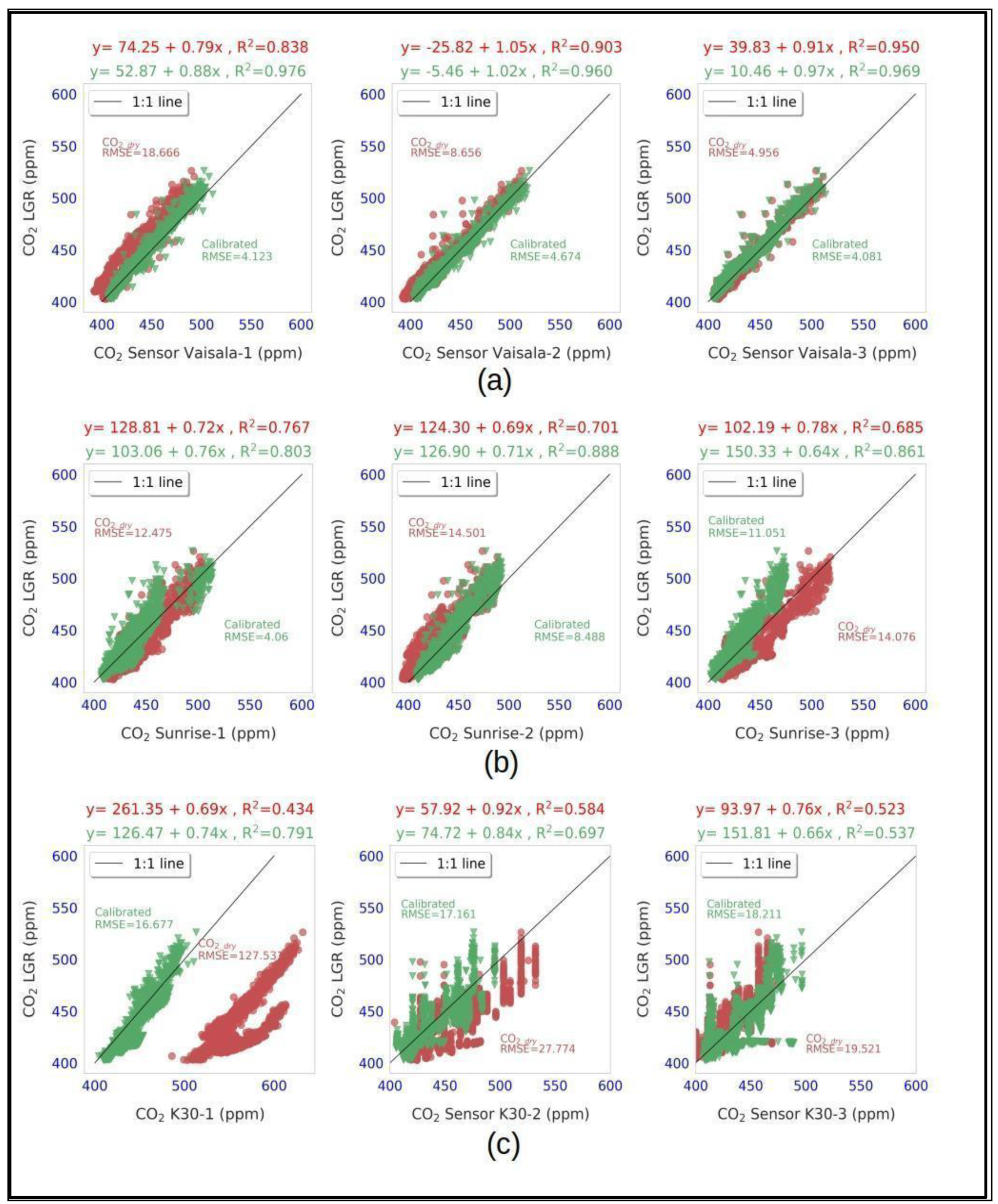
3.1. Sensor Intercomparison
3.2. Machine Learning Algorithms for Correction
3.3. Environmental Chamber Measurements as Training Data
3.4. Limitations and Future Recommendations
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, Y.; Lyu, M.; Yang, P.; Lai, D.Y.; Tong, C.; Zhao, G.; Li, L.; Zhang, Y.; Yang, H. Spatial variations in CO2 fluxes in a subtropical coastal reservoir of Southeast China were related to urbanization and land-use types. J. Environ. Sci. (China) 2021, 109, 206–218. [Google Scholar] [CrossRef]
- Lapierre, J.-F.; Seekell, D.A.; Filstrup, C.T.; Collins, S.M.; Fergus, C.E.; Soranno, P.A.; Cheruvelil, K.S. Continental-scale variation in controls of summer CO2 in United States lakes. J. Geophys. Res. Biogeosci. 2017, 122, 875–885. [Google Scholar] [CrossRef]
- Li, Y.; Zheng, J.; Dong, S.; Wen, X.; Jin, X.; Zhang, L.; Peng, X. Temporal variations of local traffic CO2 emissions and its relationship with CO2 flux in Beijing, China. Transp. Res. Part D Transp. Environ. 2019, 67, 1–15. [Google Scholar] [CrossRef]
- Feng, T.; Zhou, B. Impact of urban spatial structure elements on carbon emissions efficiency in growing megacities: The case of Chengdu. Sci. Rep. 2023, 13, 9939. [Google Scholar] [CrossRef] [PubMed]
- Pandey, S.K.; Kim, K.-H. The Relative Performance of NDIR-based Sensors in the Near Real-time Analysis of CO₂ in Air. Sensors 2007, 7, 1683–1696. [Google Scholar] [CrossRef] [PubMed]
- Yi, S.; Park, Y.; Han, S.; Min, N.; Kim, E.; Ahn, T. Novel NDIR CO2 sensor for indoor air quality monitoring. In Proceedings of the 13th International Conference on Solid-State Sensors, Actuators and Microsystems, 2005. Digest of Technical Papers. TRANSDUCERS ’05, Seoul, Republic of Korea, 5–9 June 2005; pp. 1211–1214. [Google Scholar] [CrossRef]
- Zimmerman, N.; Presto, A.A.; Kumar, S.P.N.; Gu, J.; Hauryliuk, A.; Robinson, E.S.; Robinson, A.L.; Subramanian, R. A machine learning calibration model using random forests to improve sensor performance for lower-cost air quality monitoring. Atmos. Meas. Tech. 2018, 11, 291–313. [Google Scholar] [CrossRef]
- Müller, M.; Graf, P.; Meyer, J.; Pentina, A.; Brunner, D.; Perez-Cruz, F.; Hüglin, C.; Emmenegger, L. Integration and calibration of non-dispersive infrared (NDIR) CO2 low-cost sensors and their operation in a sensor network covering Switzerland. Atmos. Meas. Tech. 2020, 13, 3815–3834. [Google Scholar] [CrossRef]
- Aleixandre, M.; Gerboles, M. Review of Small Commercial Sensors for Indicative Monitoring of Ambient Gas. Chem. Eng. Trans. 2012, 30. [Google Scholar]
- Marathe, S.; Nambi, A.; Swaminathan, M.; Sutaria, R. CurrentSense: A novel approach for fault and drift detection in environmental IoT sensors. In Proceedings of the International Conference on Internet-of-Things Design and Implementation, Charlottesvle, VA, USA, 18–21 May 2021; pp. 93–105. [Google Scholar] [CrossRef]
- Vafaei, M.; Amini, A. Chamberless NDIR CO2 Sensor Robust against Environmental Fluctuations. ACS Sens. 2021, 6, 1536–1542. [Google Scholar] [CrossRef]
- US EPA. Air Sensor Performance Targets and Testing Protocols | US EPA. 2024. Available online: https://www.epa.gov/air-sensor-toolbox/air-sensor-performance-targets-and-testing-protocols (accessed on 24 January 2024).
- Marinov, M.B.; Djermanova, N.; Ganev, B.; Nikolov, G.; Janchevska, E. Performance Evaluation of Low-cost Carbon Dioxide Sensors. In Proceedings of the 2018 IEEE XXVII International Scientific Conference Electronics—ET, Sozopol, Bulgaria, 13–15 September 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Martin, C.R.; Zeng, N.; Karion, A.; Dickerson, R.R.; Ren, X.; Turpie, B.N.; Weber, K.J. Evaluation and environmental correction of ambient CO2 measurements from a low-cost NDIR sensor. Atmos. Meas. Tech. 2017, 10, 2383–2395. [Google Scholar] [CrossRef]
- Bastviken, D.; Sundgren, I.; Natchimuthu, S.; Reyier, H.; Gålfalk, M. Technical Note: Cost-efficient approaches to measure carbon dioxide (CO2) fluxes and concentrations in terrestrial and aquatic environments using mini loggers. Biogeosciences 2015, 12, 3849–3859. [Google Scholar] [CrossRef]
- Brown, S.L.; Goulsbra, C.S.; Evans, M.G.; Heath, T.; Shuttleworth, E. Low cost CO2 sensing: A simple microcontroller approach with calibration and field use. HardwareX 2020, 8, e00136. [Google Scholar] [CrossRef]
- Cai, Q.; Han, P.; Pan, G.; Xu, C.; Yang, X.; Xu, H.; Ruan, D.; Zeng, N. Evaluation of Low-Cost CO2 Sensors Using Reference Instruments and Standard Gases for Indoor Use. Sensors 2024, 24, 2680. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Shusterman, A.A.; Lieschke, K.J.; Newman, C.; Cohen, R.C. The BErkeley Atmospheric CO2 Observation Network: Field Calibration and Evaluation of Low-cost Air Quality Sensors. Atmos. Meas. Tech. 2018, 11, 1937–1946. [Google Scholar] [CrossRef]
- Araújo, T.; Silva, L.; Aguiar, A.; Moreira, A. Calibration Assessment of Low-Cost Carbon Dioxide Sensors Using the Extremely Randomized Trees Algorithm. Sensors 2023, 23, 6153. [Google Scholar] [CrossRef] [PubMed]
- Pereira, P.F.; Ramos, N.M.M. Low-cost Arduino-based temperature, relative humidity and CO2 sensors—An assessment of their suitability for indoor built environments. J. Build. Eng. 2022, 60, 105151. [Google Scholar] [CrossRef]
- Rivero, R.A.G.; Hernández, L.E.M.; Schalm, O.; Rodríguez, E.H.; Sánchez, D.A.; Pérez, M.C.M.; Caraballo, V.N.; Jacobs, W.; Laguardia, A.M. A Low-Cost Calibration Method for Temperature, Relative Humidity, and Carbon Dioxide Sensors Used in Air Quality Monitoring Systems. Atmosphere 2023, 14, 191. [Google Scholar] [CrossRef]
- Tryner, J.; Phillips, M.; Quinn, C.; Neymark, G.; Wilson, A.; Jathar, S.H.; Carter, E.; Volckens, J. Design and Testing of a Low-Cost Sensor and Sampling Platform for Indoor Air Quality. Build. Environ. 2021, 206, 108398. [Google Scholar] [CrossRef]
- Senseair. Sunrise Sunrise AB Specifications. 10 August 2023. Available online: https://senseair.com/products/power-counts/sunrise/ (accessed on 28 August 2023).
- Senseair. K30 K30, Senseair, Specifications. 14 August 2023. Available online: https://senseair.com/products/flexibility-counts/k30/ (accessed on 14 August 2023).
- Vaisala. GMP343 CO₂ Probe GMP343 | Vaisala. January 2024. Available online: https://www.vaisala.com/en/products/instruments-sensors-and-other-measurement-devices/instruments-industrial-measurements/gmp343 (accessed on 9 January 2024).
- LGR-ICOS, ABB. LGR-ICOS Microportable Analyzers GLA131 Series—LGR-ICOS Portable Analyzers (Laser Analyzers) | ABB. January 2024. Available online: https://new.abb.com/products/measurement-products/analytical/laser-gas-analyzers/laser-analyzers/lgr-icos-portable-analyzers/lgr-icos-microportable-analyzers-gla131-series (accessed on 14 January 2024).
- Baer, D.S.; Paul, J.B.; Gupta, M.; O’Keefe, A. Sensitive absorption measurements in the near-infrared region using off-axis integrated-cavity-output spectroscopy. Appl. Phys. B Lasers Opt. 2002, 75, 261–265. [Google Scholar] [CrossRef]
- Joseph, J.; Külls, C.; Arend, M.; Schaub, M.; Hagedorn, F.; Gessler, A.; Weiler, M. Application of a laser-based spectrometer for continuous in situ measurements of stable isotopes of soil CO2 in calcareous and acidic soils. SOIL 2019, 5, 49–62. [Google Scholar] [CrossRef]
- Wagner, W.; Pruß, A. The IAPWS formulation 1995 for the thermodynamic properties of ordinary water substance for general and scientific use. J. Phys. Chem. Ref. Data 2002, 31, 387–535. [Google Scholar] [CrossRef]
- US EPA. Performance Testing Protocols, Metrics, and Target Values for Fine Particulate Matter Air Sensors: Use in Ambient, Outdoor, Fixed Site, Non-Regulatory Supplemental and Informational Monitoring Applications|Science Inventory|US EPA. 2021. Available online: https://cfpub.epa.gov/si/si_public_record_Report.cfm?dirEntryId=350785&Lab=CEMM (accessed on 17 December 2021).
- Tranmer, M.; Elliot, M. Multiple Linear Regression; no. 5; The Cathie Marsh Centre for Census and Survey Research (CCSR): Manchester, UK, 2008; Volume 5, pp. 1–5. [Google Scholar]
- Elangovan, M.; Devasenapati, S.B.; Sakthivel, N.R.; Ramachandran, K.I. Evaluation of expert system for condition monitoring of a single point cutting tool using principle component analysis and decision tree algorithm. Expert Syst. Appl. 2011, 38, 4450–4459. [Google Scholar] [CrossRef]
- Natekin, A.; Knoll, A. Gradient boosting machines, a tutorial. Front. Neurorobotics 2013, 7, 21. [Google Scholar] [CrossRef] [PubMed]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Wolpert, D.H. Stacked generalization. Neural Netw. 1992, 5, 241–259. [Google Scholar] [CrossRef]
- Xu, Y.; Goodacre, R. On Splitting Training and Validation Set: A Comparative Study of Cross-Validation, Bootstrap and Systematic Sampling for Estimating the Generalization Performance of Supervised Learning. J. Anal. Test. 2018, 2, 249–262. [Google Scholar] [CrossRef]
- Hengl, T.; Nussbaum, M.; Wright, M.N.; Heuvelink, G.B.M.; Gräler, B. Random forest as a generic framework for predictive modeling of spatial and spatio-temporal variables. PeerJ 2018, 6, e5518. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Intercept | Slope | R Square | RMSE (ppm) | Bias (%) |
|---|---|---|---|---|---|
| Sunrise 1 | 62.69 ± 0.98 | 0.82 ± 0.0 | 0.86 | 21.49 | 4.01 |
| Sunrise 2 | 69.26 ± 0.93 | 0.84 ± 0.0 | 0.86 | 12.07 | ±2.22 |
| Sunrise 3 | 84.06 ± 1.0 | 0.76 ± 0.0 | 0.85 | 29.27 | 5.62 |
| K30 1 | 77.0 ± 1.52 | 0.64 ± 0.0 | 0.71 | 131.47 | 22 |
| K30 2 | 85.88 ± 1.18 | 0.83 ± 0.0 | 0.79 | 19.25 | 4.1 |
| K30 3 | 143.11 ± 1.13 | 0.65 ± 0.0 | 0.74 | 25.3 | −4.4 |
| Vaisala 1 | 90.58 ± 0.81 | 0.83 ± 0.0 | 0.88 | 23.43 | −5.14 |
| Vaisala 2 | 16.31 ± 0.89 | 0.97 ± 0.0 | 0.9 | 9.99 | ±1.55 |
| Vaisala 3 | 20.1 ± 0.47 | 0.95 ± 0.0 | 0.98 | 5.66 | ±1.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dubey, R.; Telles, A.; Nikkel, J.; Cao, C.; Gewirtzman, J.; Raymond, P.A.; Lee, X. Low-Cost CO2 NDIR Sensors: Performance Evaluation and Calibration Using Machine Learning Techniques. Sensors 2024, 24, 5675. https://doi.org/10.3390/s24175675
Dubey R, Telles A, Nikkel J, Cao C, Gewirtzman J, Raymond PA, Lee X. Low-Cost CO2 NDIR Sensors: Performance Evaluation and Calibration Using Machine Learning Techniques. Sensors. 2024; 24(17):5675. https://doi.org/10.3390/s24175675
Chicago/Turabian StyleDubey, Ravish, Arina Telles, James Nikkel, Chang Cao, Jonathan Gewirtzman, Peter A. Raymond, and Xuhui Lee. 2024. "Low-Cost CO2 NDIR Sensors: Performance Evaluation and Calibration Using Machine Learning Techniques" Sensors 24, no. 17: 5675. https://doi.org/10.3390/s24175675