

Visual-Inertial RGB-D SLAM with Encoder Integration of ORB Triangulation and Depth Measurement Uncertainties

Abstract
:1. Introduction
2. System Overview
3. Fusion of ORB-SLAM3 Triangulation and Depth Measurement Uncertainty Estimations
3.1. Uncertainty Estimation in ORB-SLAM3 Triangulation and Depth Measurement
3.2. Fusion of Two Uncertainty Estimations
4. Derivation of the Wheel Encoder Model
4.1. Pre-Integration Model for Wheeled Encoder
4.2. Pre-Integration Error of Wheeled Encoder
4.2.1. Jacobian Matrix of Rotation to State Variables
4.2.2. Jacobian Matrix of Position to State Variables
5. Experimental Analysis of the VEOS3-TEDM Algorithm
5.1. Experimental Analysis of Open-Source Datasets
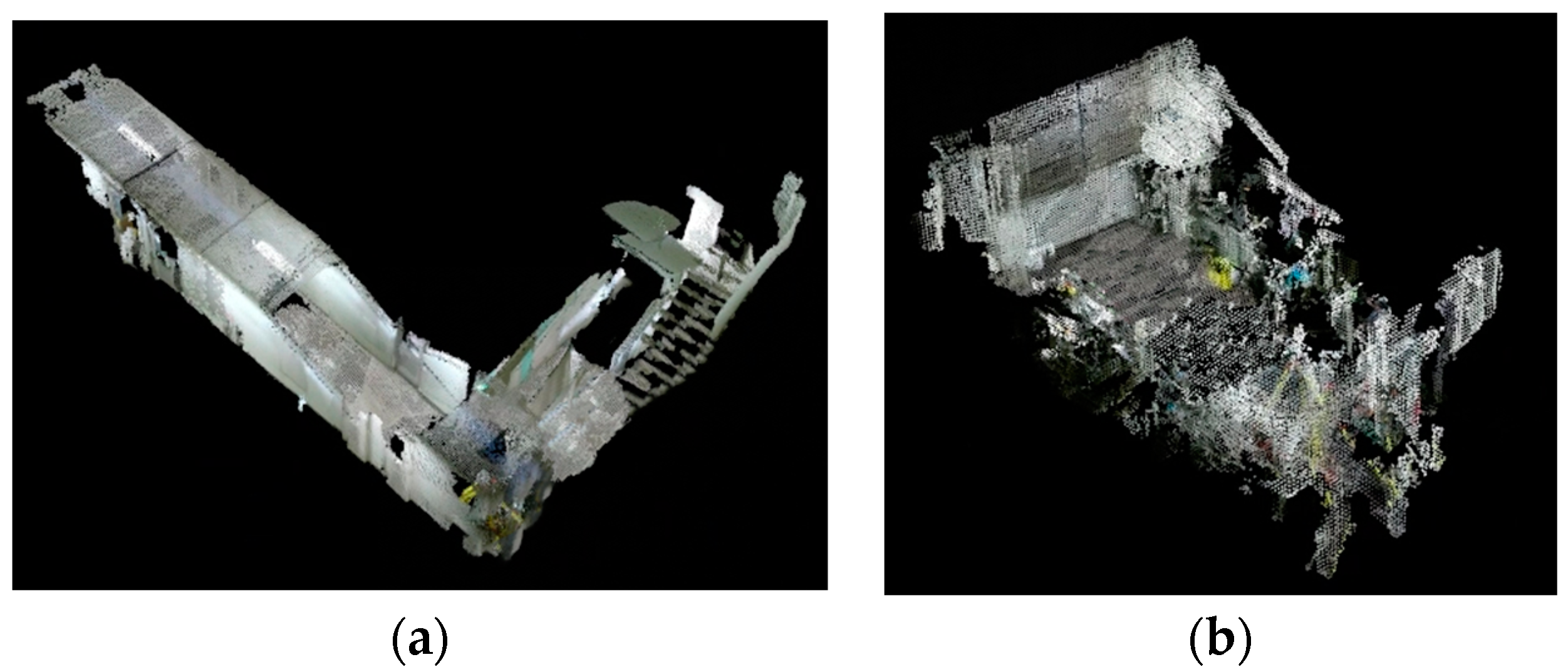
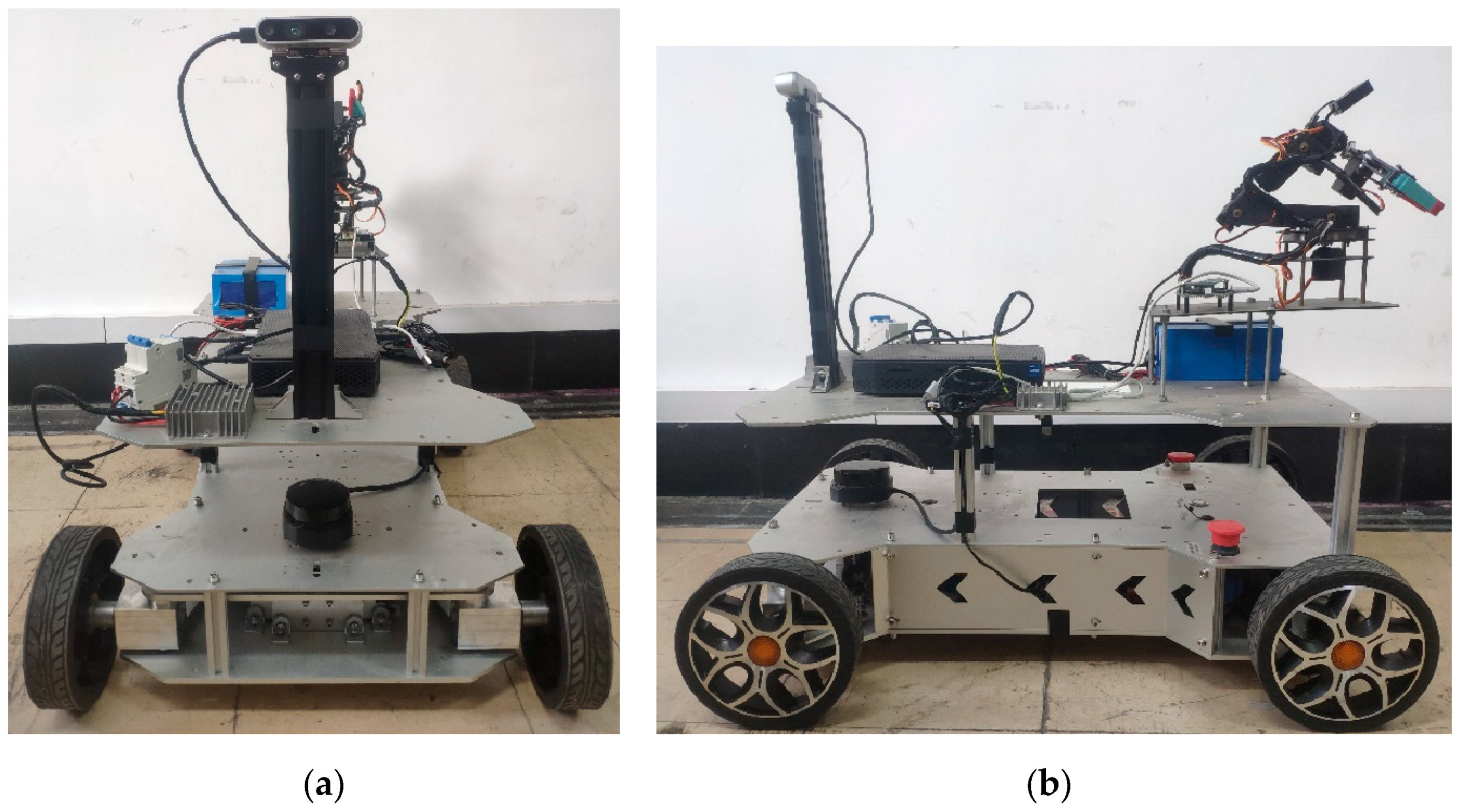
5.2. Experimental Analysis of Real-World Environments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, C.H.; Fan, B.; Hu, J.; Pan, Q.; Xu, Z. Homography-based camera pose estimation with known gravity direction for UAV navigation. Sci. China Inf. Sci. 2021, 64, 1–3. [Google Scholar] [CrossRef]
- Wang, K.; Zhao, G.; Lu, J. A Deep Analysis of Visual SLAM Methods for Highly Automated and Autonomous Vehicles in Complex Urban Environment. IEEE Trans. Intell. Transp. Syst. 2024, 4, 1–18. [Google Scholar] [CrossRef]
- Zhao, Y.L.; Hong, Y.T.; Huang, H.P. Comprehensive Performance Evaluation between Visual SLAM and LiDAR SLAM for Mobile Robots: Theories and Experiments. Appl. Sci. 2024, 14, 3945. [Google Scholar] [CrossRef]
- Hu, X.; Zhu, L.; Wang, P.; Yang, H.; Li, X. Improved ORB-SLAM2 mobile robot vision algorithm based on multiple feature fusion. IEEE Access 2023, 11, 100659–100671. [Google Scholar] [CrossRef]
- Al-Tawil, B.; Hempel, T.; Abdelrahman, A.; Al-Hamadi, A. A review of visual SLAM for robotics: Evolution, properties, and future applications. Front. Robot. AI 2024, 11, 1347985. [Google Scholar] [CrossRef]
- Campos, C.; Elvira, R.; Rodríguez, J.J.; Montiel, J.M.; Tardós, J.D. Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam. IEEE Trans. Robot. 2021, 37, 1874–1890. [Google Scholar] [CrossRef]
- Lin, J.; Peng, J.; Hu, Z.; Xie, X.; Peng, R. Orb-slam, imu and wheel odometry fusion for indoor mobile robot localization and navigation. Acad. J. Comput. Inf. Sci 2020, 27, 131–141. [Google Scholar]
- Lee, C.; Peng, J.; Xiong, Z. Asynchronous fusion of visual and wheel odometer for SLAM applications. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 6–9 July 2020; pp. 1990–1995. [Google Scholar]
- Zhou, W.; Pan, Y.; Liu, J.; Wang, T.; Zha, H. Visual-Inertial-Wheel Odometry With Wheel-Aided Maximum-a-Posteriori Initialization for Ground Robots. IEEE Robot. Autom. Lett. 2024, 9, 4814–4821. [Google Scholar] [CrossRef]
- Anousaki, G.; Gikas, V.; Kyriakopoulos, K. INS-Aided Odometry and Laser Scanning Data Integration for Real Time Positioning and Map-Building of Skid-Steered Vehicles. In Proceedings of the International Symposium on Mobile Mapping Technology, Padua, Italy, 29–31 May 2007. [Google Scholar]
- Zhou, W.; Zhou, R. Vision SLAM algorithm for wheeled robots integrating multiple sensors. PLoS ONE 2024, 19, e0301189. [Google Scholar] [CrossRef]
- Cabrera-Ávila, E.V.; da Silva, B.M.; Gonçalves, L.M. Nonlinearly Optimized Dual Stereo Visual Odometry Fusion. J. Intell. Robot. Syst. 2024, 110, 56. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, S.; Fitch, R. Active SLAM for mobile robots with area coverage and obstacle avoidance. IEEE/ASME Trans. Mechatron. 2020, 25, 1182–1192. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, S.; Zhao, L.; Dissanayake, G. Cramér–Rao bounds and optimal design metrics for pose-graph SLAM. IEEE Trans. Robot. 2021, 37, 627–641. [Google Scholar] [CrossRef]
- Mu, B.; Giamou, M.; Paull, L.; Agha-mohammadi, A.A.; Leonard, J.; How, J. Information-based active SLAM via topological feature graphs. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 5583–5590. [Google Scholar]
- Li, N.; Zhou, F.; Yao, K.; Hu, X.; Wang, R. Multisensor Fusion SLAM Research Based on Improved RBPF-SLAM Algorithm. J. Sens. 2023, 2023, 3100646. [Google Scholar] [CrossRef]
- Lin, X.; Huang, Y.; Sun, D.; Lin, T.Y.; Englot, B.; Eustice, R.M.; Ghaffari, M. A Robust Keyframe-Based Visual SLAM for RGB-D Cameras in Challenging Scenarios. IEEE Access 2023, 11, 97239–97249. [Google Scholar] [CrossRef]
- Yuan, J.; Zhu, S.; Tang, K.; Sun, Q. ORB-TEDM: An RGB-D SLAM approach fusing ORB triangulation estimates and depth measurements. IEEE Trans. Instrum. Meas. 2022, 71, 1–15. [Google Scholar] [CrossRef]
- Vakhitov, A.; Ferraz, L.; Agudo, A.; Moreno-Noguer, F. Uncertainty-aware camera pose estimation from points and lines. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 4659–4668. [Google Scholar]
- Belter, D.; Nowicki, M.; Skrzypczyński, P. Improving accuracy of feature-based RGB-D SLAM by modeling spatial uncertainty of point features. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1279–1284. [Google Scholar]
- Belter, D.; Nowicki, M.; Skrzypczyński, P. Modeling spatial uncertainty of point features in feature-based RGB-D SLAM. Mach. Vis. Appl. 2018, 29, 827–844. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, Y. Improved feature point extraction method of ORB-SLAM2 dense map. Assem. Autom. 2022, 42, 552–566. [Google Scholar] [CrossRef]
- Lee, S.W.; Hsu, C.M.; Lee, M.C.; Fu, Y.T.; Atas, F.; Tsai, A. Fast point cloud feature extraction for real-time slam. In Proceedings of the 2019 International Automatic Control Conference (CACS), Keelung, Taiwan, 13–16 November 2019; pp. 1–6. [Google Scholar]
- Zhou, F.; Zhang, L.; Deng, C.; Fan, X. Improved point-line feature based visual SLAM method for complex environments. Sensors 2021, 21, 4604. [Google Scholar] [CrossRef]
- Gomez-Ojeda, R.; Moreno, F.A.; Zuniga-Noël, D.; Scaramuzza, D.; Gonzalez-Jimenez, J. PL-SLAM: A stereo SLAM system through the combination of points and line segments. IEEE Trans. Robot. 2019, 35, 734–746. [Google Scholar] [CrossRef]
- Engel, J.; Schöps, T.; Cremers, D. LSD-SLAM: Large-scale direct monocular SLAM. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; Volume 8690, pp. 834–849. [Google Scholar]
- Eudes, A.; Lhuillier, M. Error propagations for local bundle adjustment. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 2411–2418. [Google Scholar]
- Barfoot, T.D.; Furgale, P.T. Associating uncertainty with three-dimensional poses for use in estimation problems. IEEE Trans. Robot. 2014, 30, 679–693. [Google Scholar] [CrossRef]
- Li, L.; Yang, M. Joint localization based on split covariance intersection on the Lie group. IEEE Trans. Robot. 2021, 37, 1508–1524. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Montiel, J.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Wang, Y.; Ng, Y.; Sa, I.; Parra, A.; Rodriguez, C.; Lin, T.J.; Li, H. Mavis: Multi-camera augmented visual-inertial slam using se2 (3) based exact imu pre-integration. arXiv 2023, arXiv:2309.08142. [Google Scholar]
- Wang, Z.; Peng, Z.; Guan, Y.; Wu, L. Manifold regularization graph structure auto-encoder to detect loop closure for visual SLAM. IEEE Access 2019, 7, 59524–59538. [Google Scholar] [CrossRef]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Kazerouni, I.A.; Fitzgerald, L.; Dooly, G.; Toal, D. A survey of state-of-the-art on visual SLAM. Expert Syst. Appl. 2022, 205, 117734. [Google Scholar] [CrossRef]
- Cai, D.; Li, R.; Hu, Z.; Lu, J.; Li, S.; Zhao, Y. A comprehensive overview of core modules in visual SLAM framework. Neurocomputing 2024, 590, 127760. [Google Scholar] [CrossRef]
- Usenko, V.; Engel, J.; Stückler, J.; Cremers, D. Direct visual-inertial odometry with stereo cameras. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1885–1892. [Google Scholar]
- Leutenegger, S.; Lynen, S.; Bosse, M.; Siegwart, R.; Furgale, P. Keyframe-based visual–inertial odometry using nonlinear optimization. Int. J. Robot. Res. 2015, 34, 314–334. [Google Scholar] [CrossRef]
- Bloesch, M.; Omari, S.; Hutter, M.; Siegwart, R. Robust visual inertial odometry using a direct EKF-based approach. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 298–304. [Google Scholar]
- Qin, T.; Li, P.; Shen, S. Vins-mono: A robust and versatile monocular visual-inertial state estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef]
- Burri, M.; Nikolic, J.; Gohl, P.; Schneider, T.; Rehder, J.; Omari, S.; Achtelik, M.W.; Siegwart, R. The EuRoC micro aerial vehicle datasets. Int. J. Robot. Res. 2016, 35, 1157–1163. [Google Scholar]
- Cho, B.S.; Moon, W.S.; Seo, W.J.; Baek, K.R. A dead reckoning localization system for mobile robots using inertial sensors and wheel revolution encoding. J. Mech. Sci. Technol. 2011, 25, 2907–2917. [Google Scholar] [CrossRef]
- Zhu, Z.; Kaizu, Y.; Furuhashi, K.; Imou, K. Visual-inertial RGB-D SLAM with encoders for a differential wheeled robot. IEEE Sens. J. 2021, 22, 5360–5371. [Google Scholar] [CrossRef]
- Sturm, J.; Engelhard, N.; Endres, F.; Burgard, W.; Cremers, D. A benchmark for the evaluation of RGB-D SLAM systems. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 573–580. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm Name | Sensors | RMSE (m) | Average Tracking Time per Frame (ms) | Pose Estimation Ratio (%) |
|---|---|---|---|---|
| Encoders | 0.463 | 1 | 100 | |
| ORB-SLAM2 | RGB-D | X | X | 45 |
| ORB-SLAM3 | RGB-D | X | X | 94 |
| RGB-D + IMU | X | X | 5 | |
| VEORB-SLAM3 | RGB-D + Encoders | 0.094 | 17 | 100 |
| VIEORB-SLAM3 | RGB-D + IMU + Encoder | s0.114 | 26 | 100 |
| VOS3-TEDM | CI-TEDM | X | X | 96 |
| VEOS3-TEDM | CI-TEDM + Encoders | 0.083 | 14 | 100 |
| VIEOS3-TEDM | CI-TEDM + IMU + Encoders | 0.107 | 23 | 100 |
| Algorithm Name | Sensors | RMSE (m) | Average Tracking Time per Frame (ms) | Pose Estimation Ratio (%) |
|---|---|---|---|---|
| Encoders | 0.382 | 1 | 100 | |
| ORB-SLAM2 | RGB-D | X | X | 92 |
| ORB-SLAM3 | RGB-D | 0.1167 | 22 | 100 |
| RGB-D + IMU | X | X | 5 | |
| VEORB-SLAM3 | RGB-D + Encoders | 0.1104 | 21 | 100 |
| VIEORB-SLAM3 | RGB-D + IMU + Encoders | 0.128 | 33 | 100 |
| VOS3-TEDM | CI-TEDM | 0.1054 | 20 | 100 |
| VEOS3-TEDM | CI-TEDM + Encoders | 0.087 | 16 | 100 |
| VIEOS3-TEDM | CI-TEDM + IMU + Encoders | 0.115 | 29 | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.-W.; Cheng, W.-S. Visual-Inertial RGB-D SLAM with Encoder Integration of ORB Triangulation and Depth Measurement Uncertainties. Sensors 2024, 24, 5964. https://doi.org/10.3390/s24185964
Ma Z-W, Cheng W-S. Visual-Inertial RGB-D SLAM with Encoder Integration of ORB Triangulation and Depth Measurement Uncertainties. Sensors. 2024; 24(18):5964. https://doi.org/10.3390/s24185964
Chicago/Turabian StyleMa, Zhan-Wu, and Wan-Sheng Cheng. 2024. "Visual-Inertial RGB-D SLAM with Encoder Integration of ORB Triangulation and Depth Measurement Uncertainties" Sensors 24, no. 18: 5964. https://doi.org/10.3390/s24185964