
The Latest Developments in Spaceborne High-Resolution Wide-Swath SAR Systems and Imaging Methods


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Analysis of Constraints for HRWS Spaceborne SAR
2.1. Minimum Antenna Area Constraint
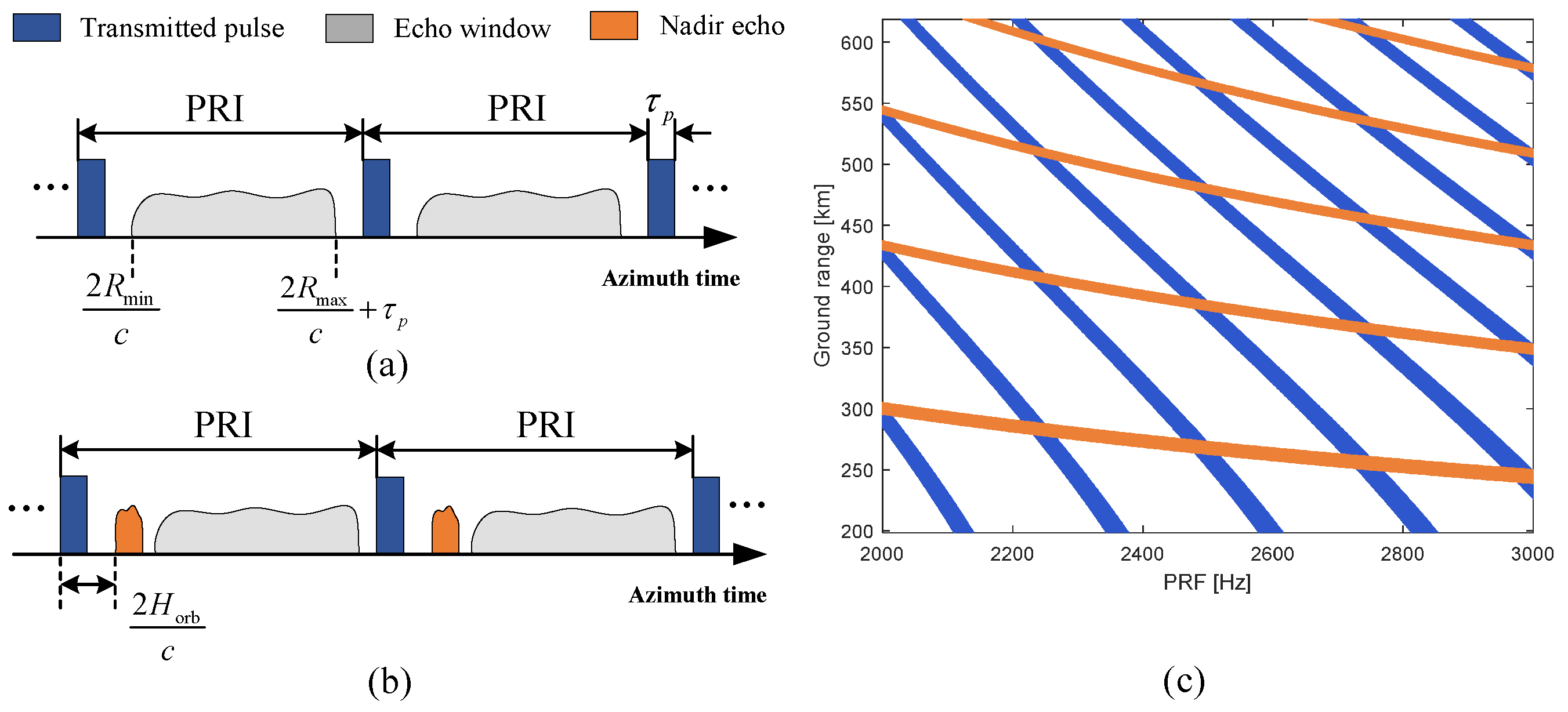
2.2. Echo Timing Constraint
2.3. Critical Performance of Spaceborne SAR System
2.3.1. AASR
2.3.2. RASR
2.3.3. NESZ
3. Azimuth Multichannel Technique
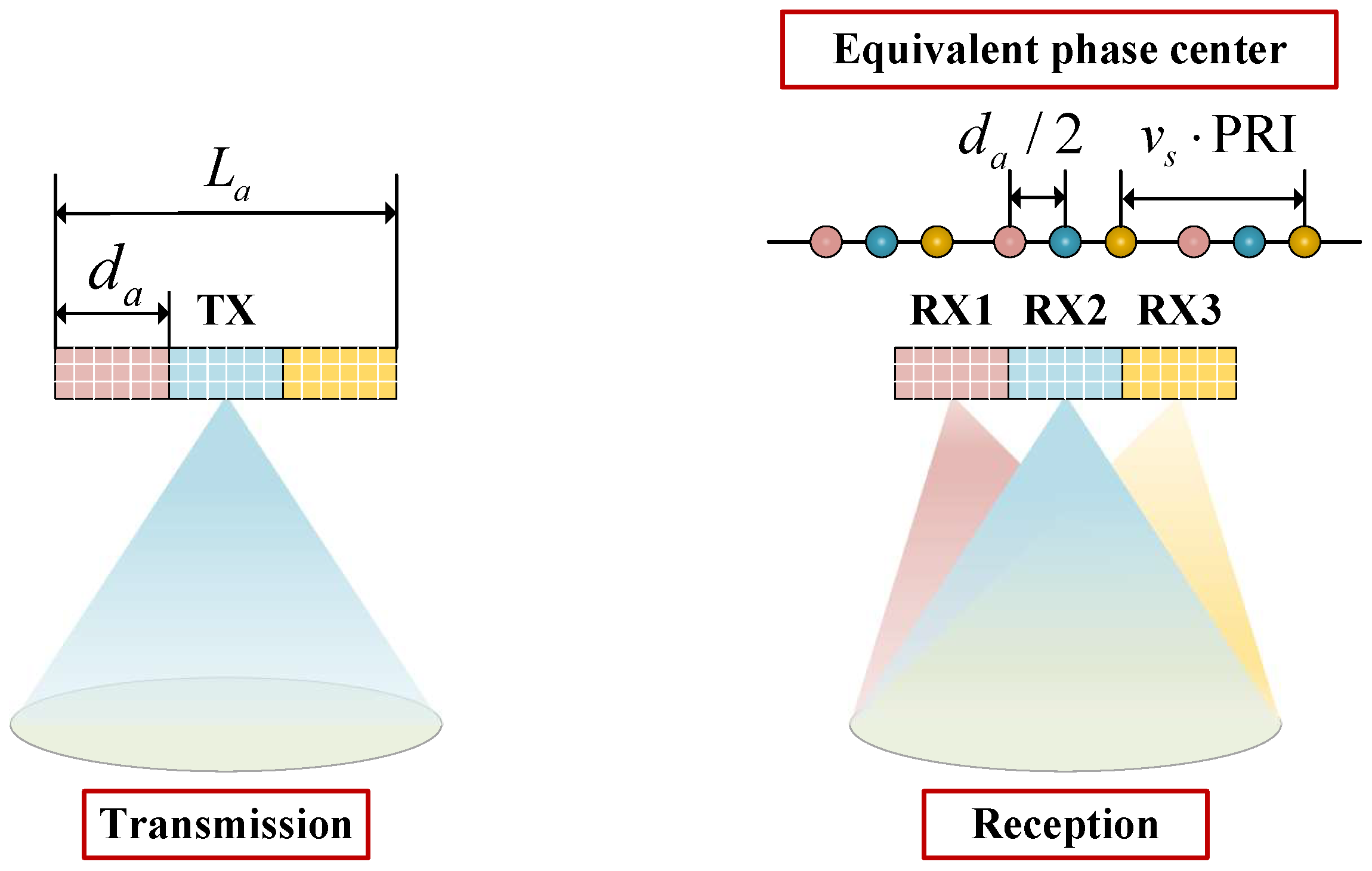
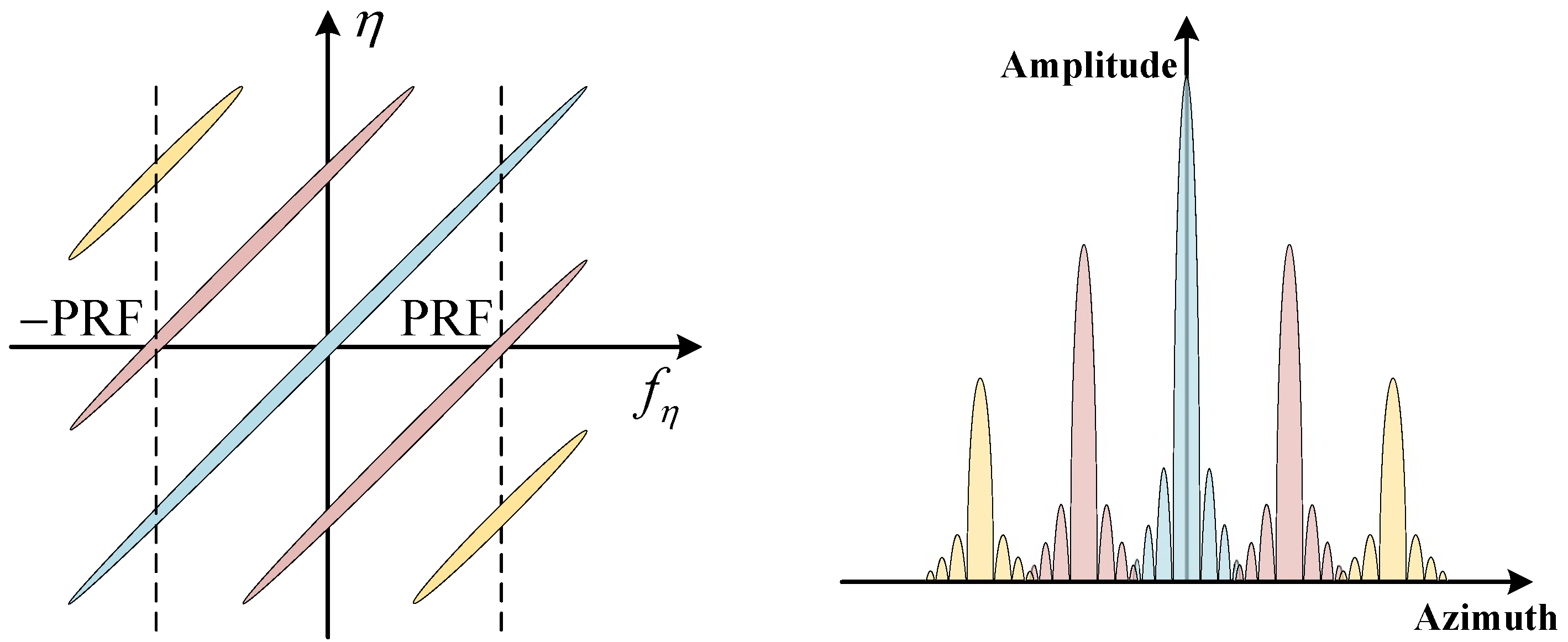
3.1. Principle of Azimuth Multichannel Technique
3.2. Azimuth Multichannel Processing Scheme
3.3. Multichannel Error Calibration
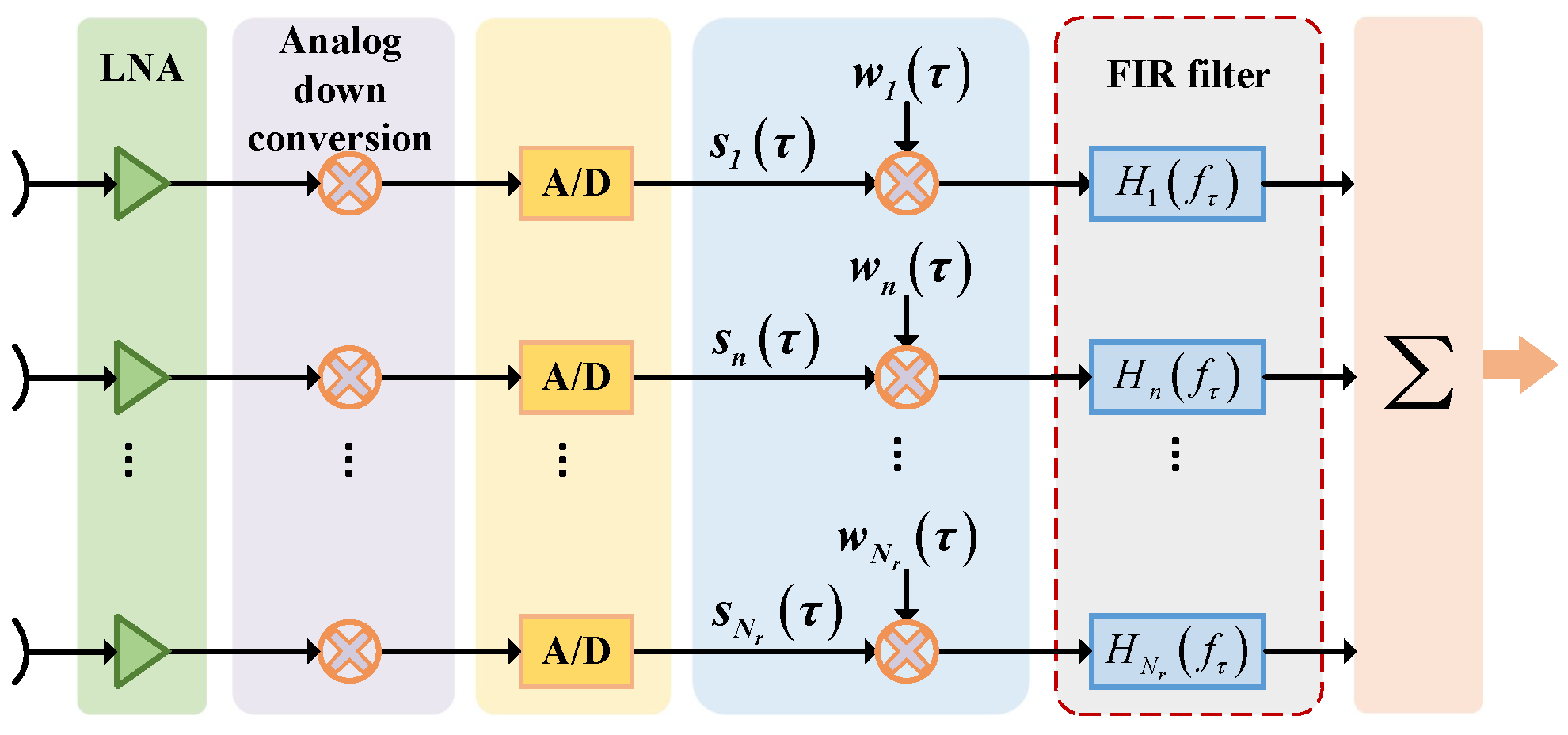
4. Digital Beamforming Technique
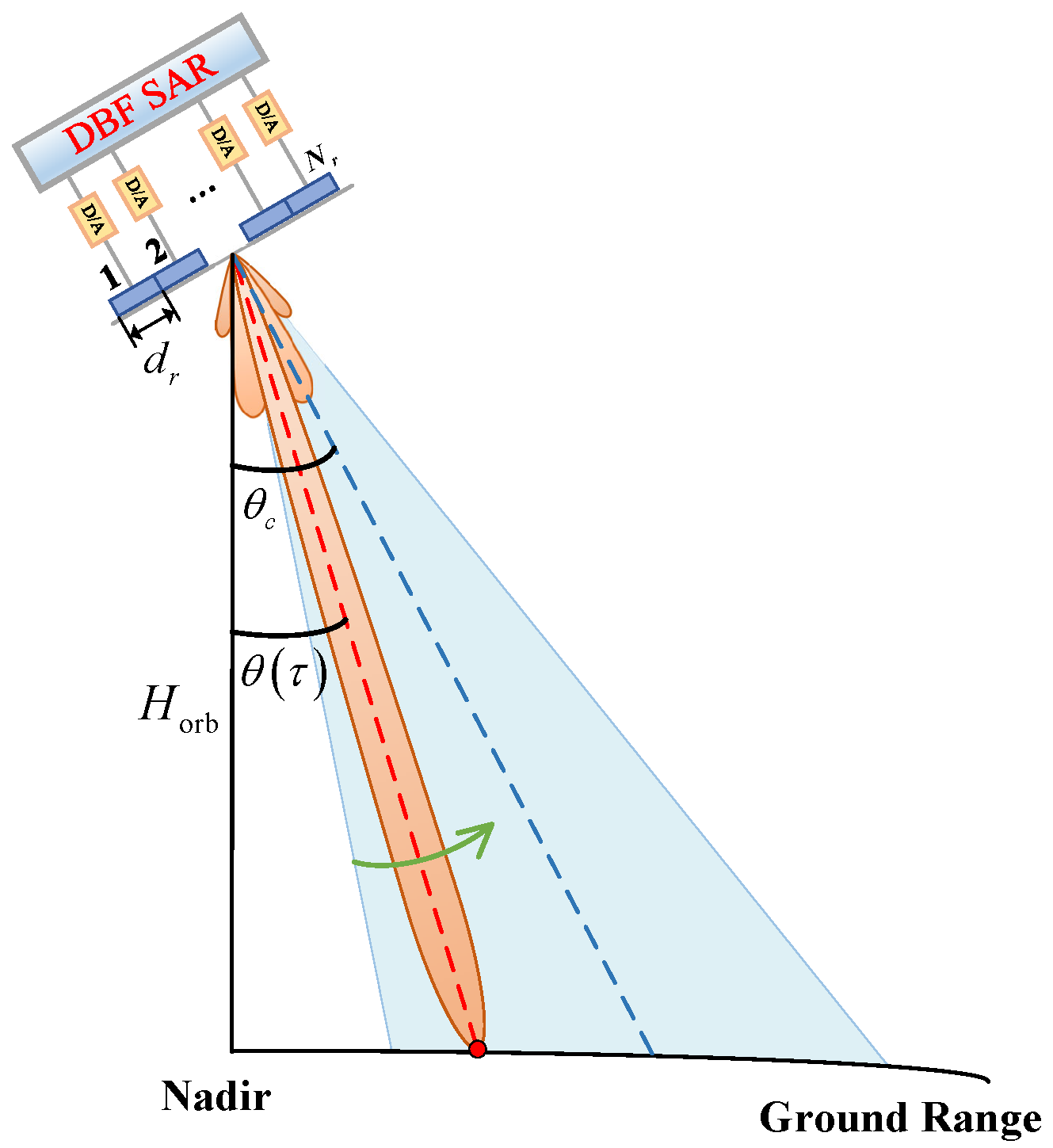
4.1. Principle of DBF Technique
4.2. SCORE Loss of DBF SAR
4.2.1. Pulse Extension Loss
4.2.2. Frequency Dispersion Loss
4.3. Computational Load for Real-Time Processing
4.3.1. IF-DBF Architecture
4.3.2. Optimized Weight Generator
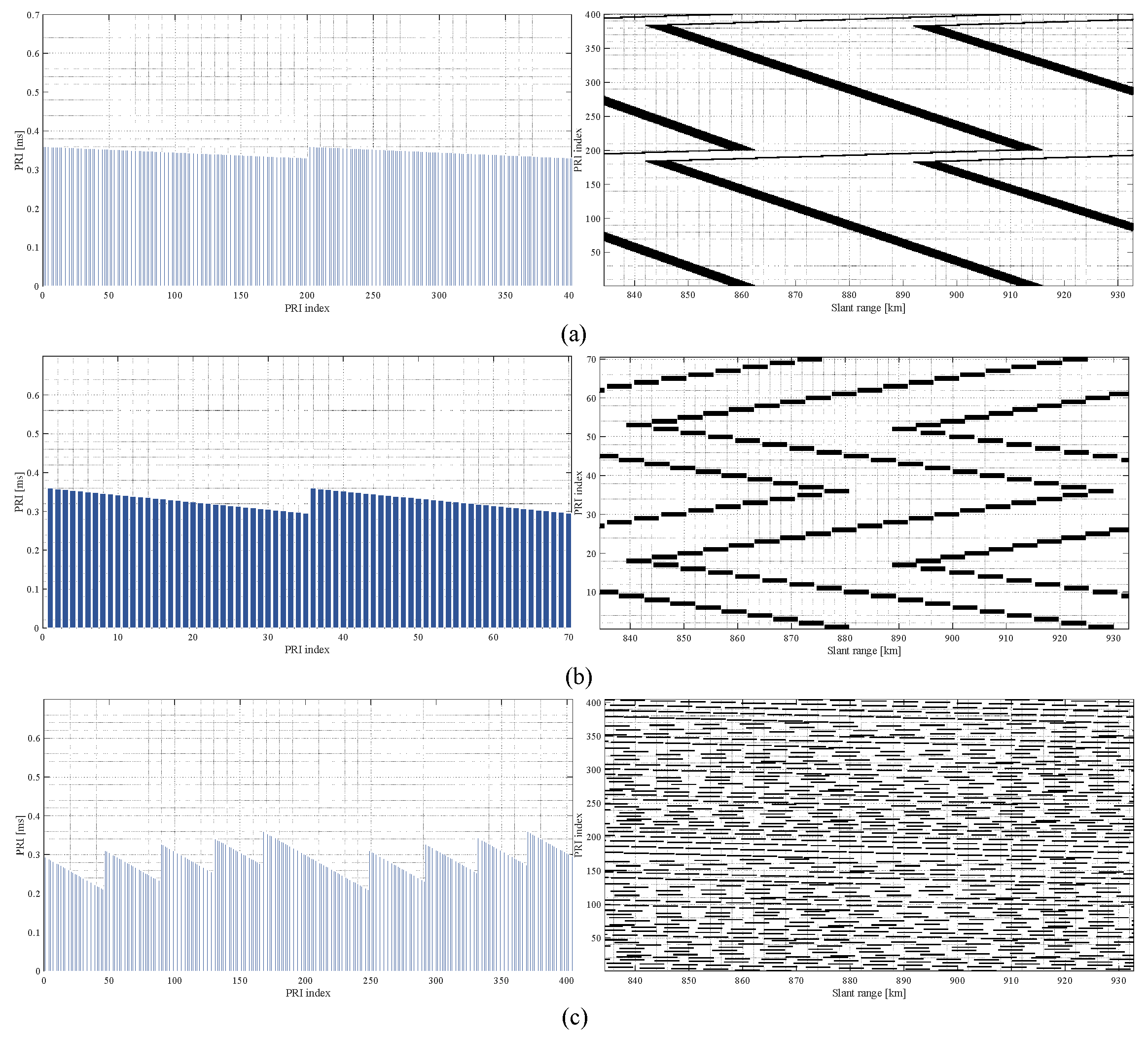
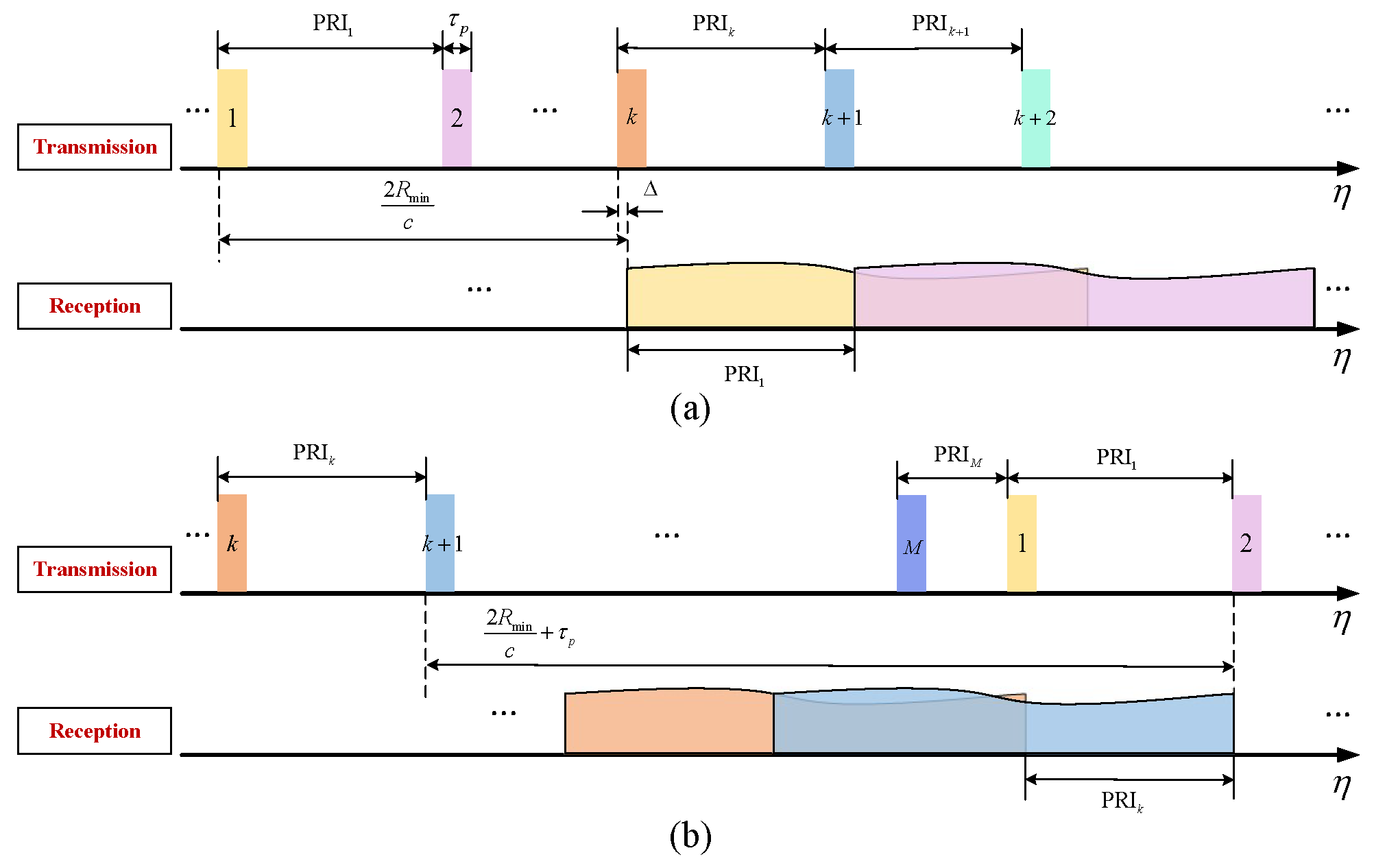
5. PRI Variation Technique
5.1. Principle of PRI Variation Technique
5.2. PRI Variation Strategy
5.3. Signal Processing
6. Discussion
- (1)
- Azimuth multichannel technique
- (2)
- DBF technique
- (3)
- PRF variation technique
7. Perspectives
- (1)
- Ultra-High Resolution and Ultra-Wide Swath: Current HRWS SAR enables either ultrawide swath imaging (with swath widths of several hundred kilometers and meter-level resolution) or ultra-high resolution (with swath widths of tens of kilometers and sub-meter resolution). For instance, the recently launched Advanced Land Observing Satellite-4 (ALOS-4) provides a resolution of 3 m with a swath width of 200 km [91], while the Capella SAR achieves a resolution of 0.3 m with a swath width of 5 km [92]. Given the significantly increasing demand for detailed and timely target information in remote sensing applications, it is reasonable to anticipate that future HRWS SAR systems will aim to achieve both ultra-high resolution and ultrawide swath capabilities simultaneously. Ultra-high resolution and ultrawide swath (UHR-UWS) SAR will outperform the imaging capacity of current SAR by at least one order of magnitude and allow the global observation of dynamic processes on the Earth’s surface with hitherto unknown quality and resolution.
- (2)
- Distributed HRWS SAR: The integration of distributed SAR with HRWS SAR is an increasingly prominent area of research. As the demand for HRWS grows, monostatic HRWS SAR faces significant challenges, including increased system complexity, weight, volume, and limited platform resources. Distributed SAR offers an attractive solution to these challenges. By deploying multiple transmitters and/or receivers on different platforms, distributed SAR can capture multi-angle scattering information and provide flexible baseline configurations. These capabilities enhance digital elevation model (DEM) inversion, moving target detection, and velocity estimation. Current on-orbit distributed SAR systems, such as HT-1 [93], have demonstrated these advantages, and upcoming missions like Harmony and Tandem-L [72,94] are expected to achieve similar benefits. The future of distributed HRWS SAR lies in its ability to accomplish a variety of observation tasks through the application of advanced formation flying techniques, synchronization methods, and multi-static signal processing techniques [95,96].
- (3)
- Multiple Imaging Modes: To accommodate various observation tasks and enhance the operational flexibility of SAR, HRWS SAR is required to support multiple imaging modes simultaneously. These modes include stripmap, scan, sliding, spotlight, and varied-PRI modes, among others, which can be switched seamlessly. Current HRWS SAR, such as GF-3 and LuTan-1, already possess the capability to operate in multiple imaging modes [6,8]. Furthermore, emerging technologies like Concurrent SAR [97,98] enable simultaneous imaging of multiple regions in different modes. In addition, HRWS SAR will still be required to have the ability to acquire multiple polarizations and multiple frequency bands to extract higher dimensional target information. Looking forward, HRWS SAR is expected to continue this trend and extract more comprehensive information through the joint processing of SAR data in various modes.
- (4)
- Combination of advanced techniques: There is no doubt that the combination of SAR with various advanced techniques is pivotal to the development of HRWS SAR. For example, HRWS SAR can leverage some novel signal processing techniques to enhance system performance, such as random sampling [75], coprime sampling [99], deep learning techniques [78], etc. Additionally, HRWS SAR benefits from advanced antenna techniques, including frequency scanning antennas [100,101,102], frequency diversity array antennas [103], and large reflector antennas combined with digital beamforming technology [104]. These innovative theories and techniques are essential for fully exploiting the observational potential of HRWS SAR and enhancing its effectiveness in remote sensing applications.
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Elachi, C. Spaceborne Radar Remote Sensing: Applications and Techniques; IEEE: New York, NY, USA, 1988. [Google Scholar]
- Freeman, A.; Johnson, W.T.K.; Huneycutt, B.; Jordan, R.; Hensley, S.; Siqueira, P.; Curlander, J. The “Myth” of the minimum SAR antenna area constraint. IEEE Trans. Geosci. Remote Sens. 2000, 38, 320–324. [Google Scholar] [CrossRef]
- Currie, A.; Brown, M.A. Wide-swath SAR. In Proceedings of the IEE Proceedings F (Radar and Signal Processing); IET: London, UK, 1992; Volume 139, pp. 122–135. [Google Scholar]
- Kim, J.H.; Younis, M.; Prats-Iraola, P.; Gabele, M.; Krieger, G. First Spaceborne Demonstration of Digital Beamforming for Azimuth Ambiguity Suppression. IEEE Trans. Geosci. Remote Sens. 2013, 51, 579–590. [Google Scholar] [CrossRef]
- Sikaneta, I.; Gierull, C.H.; Cerutti-Maori, D. Optimum Signal Processing for Multichannel SAR: With Application to High-Resolution Wide-Swath Imaging. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6095–6109. [Google Scholar] [CrossRef]
- Sun, J.; Yu, W.; Deng, Y. The SAR payload design and performance for the GF-3 mission. Sensors 2017, 17, 2419. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, H.; Ou, N.; Liu, K.; Liang, D.; Deng, Y.; Wang, R. First Demonstration of Multipath Effects on Phase Synchronization Scheme for LT-1. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2590–2604. [Google Scholar] [CrossRef]
- Cai, Y.; Li, J.; Yang, Q.; Liang, D.; Liu, K.; Zhang, H.; Lu, P.; Wang, R. First Demonstration of RFI Mitigation in the Phase Synchronization of LT-1 Bistatic SAR. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–19. [Google Scholar] [CrossRef]
- Callaghan, G.D.; Longstaff, I.D. Wide-swath space-borne SAR using a quad-element array. Radar, Sonar Navig. IEE Proc. 1999, 146, 159–165. [Google Scholar] [CrossRef]
- Süß, M.; Grafmüller, B.; Zahn, R. A novel high resolution, wide swath SAR system. In Proceedings of the IGARSS 2001, Scanning the Present and Resolving the Future, IEEE 2001 International Geoscience and Remote Sensing Symposium (Cat. No. 01CH37217), Sydney, Australia, 9–13 July 2001; IEEE: Piscataway, NJ, USA, 2001; Volume 3, pp. 1013–1015. [Google Scholar]
- Krieger, G.; Gebert, N.; Moreira, A. Multidimensional Waveform Encoding: A New Digital Beamforming Technique for Synthetic Aperture Radar Remote Sensing. IEEE Trans. Geosci. Remote Sens. 2008, 46, 31–46. [Google Scholar] [CrossRef]
- Younis, M.; Bordoni, F.; Gebert, N.; Krieger, G. Smart Multi-Aperture Radar Techniques for Spaceborne Remote Sensing. In Proceedings of the IGARSS 2008—2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 6–11 July 2008; Volume 3, pp. III–278–III–281. [Google Scholar] [CrossRef]
- Krieger, G.; Younis, M.; Gebert, N.; Huber, S.; Bordoni, F.; Patyuchenko, A.; Moreira, A. Advanced digital beamforming concepts for future SAR systems. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 245–248. [Google Scholar] [CrossRef]
- Krieger, G.; Gebert, N.; Younis, M.; Bordoni, F.; Patyuchenko, A.; Moreira, A. Advanced Concepts for Ultra-Wide-Swath SAR Imaging. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008; pp. 1–4. [Google Scholar]
- Gebert, N.; Krieger, G. Ultra-wide swath SAR imaging with continuous PRF variation. In Proceedings of the 8th European Conference on Synthetic Aperture Radar. VDE, Aachen, Germany, 7–10 June 2010; pp. 1–4. [Google Scholar]
- Villano, M.; Krieger, G.; Moreira, A. Staggered-SAR for high-resolution wide-swath imaging. In Proceedings of the IET International Conference on Radar Systems (Radar 2012), Glasgow, UK, 22–25 October 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Motohka, T.; Kankaku, Y.; Miura, S.; Suzuki, S. ALOS-4 L-Band SAR Observation Concept and Development Status. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 3792–3794. [Google Scholar] [CrossRef]
- Pinheiro, M.; Prats-Iraola, P.; Rodriguez-Cassola, M.; Villano, M. Analysis of Low-Oversampled Staggered SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 241–255. [Google Scholar] [CrossRef]
- Huber, S.; de Almeida, F.Q.; Villano, M.; Younis, M.; Krieger, G.; Moreira, A. Tandem-L: A Technical Perspective on Future Spaceborne SAR Sensors for Earth Observation. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4792–4807. [Google Scholar] [CrossRef]
- Krieger, G.; Gebert, N.; Moreira, A. Unambiguous SAR signal reconstruction from nonuniform displaced phase center sampling. IEEE Geosci. Remote Sens. Lett. 2004, 1, 260–264. [Google Scholar] [CrossRef]
- Brown, J. Multi-channel sampling of low-pass signals. IEEE Trans. Circuits Syst. 1981, 28, 101–106. [Google Scholar] [CrossRef]
- Papoulis, A. Generalized sampling expansion. IEEE Trans. Circuits Syst. 1977, 24, 652–654. [Google Scholar] [CrossRef]
- Gebert, N.; Krieger, G.; Moreira, A. Digital beamforming on receive: Techniques and optimization strategies for high-resolution wide-swath SAR imaging. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 564–592. [Google Scholar] [CrossRef]
- Guerci, J.R. Space-Time Adaptive Processing for Radar; Artech House: London, UK, 2014. [Google Scholar]
- Li, Z.; Wang, H.; Su, T.; Bao, Z. Generation of wide-swath and high-resolution SAR images from multichannel small spaceborne SAR systems. IEEE Geosci. Remote Sens. Lett. 2005, 2, 82–86. [Google Scholar] [CrossRef]
- Sun, G.C.; Xing, M.; Xia, X.G.; Wu, Y.; Huang, P.; Wu, Y.; Bao, Z. Multichannel Full-Aperture Azimuth Processing for Beam Steering SAR. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4761–4778. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P.; Wang, Z. On robust Capon beamforming and diagonal loading. IEEE Trans. Signal Process. 2003, 51, 1702–1715. [Google Scholar] [CrossRef]
- Zhang, L.; He, B.s.; Xing, M.d.; Bao, Z. Using STMR Configuration for Doppler Ambiguity Resolving Bistatic SAR Imaging. J. Electron. Inf. Technol. 2009, 31, 2044–2047. [Google Scholar]
- Cerutti-Maori, D.; Sikaneta, I.; Klare, J.; Gierull, C.H. MIMO SAR Processing for Multichannel High-Resolution Wide-Swath Radars. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5034–5055. [Google Scholar] [CrossRef]
- Zhang, S.X.; Xing, M.D.; Xia, X.G.; Zhang, L.; Guo, R.; Liao, Y.; Bao, Z. Multichannel HRWS SAR Imaging Based on Range-Variant Channel Calibration and Multi-Doppler-Direction Restriction Ambiguity Suppression. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4306–4327. [Google Scholar] [CrossRef]
- Zuo, S.S.; Xing, M.; Xia, X.G.; Sun, G.C. Improved Signal Reconstruction Algorithm for Multichannel SAR Based on the Doppler Spectrum Estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1425–1442. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhang, Z.; Wang, R.; Guo, L. Out-of-Band Ambiguity Analysis of Nonuniformly Sampled SAR Signals. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2027–2031. [Google Scholar] [CrossRef]
- Guo, L.; Wang, R.; Deng, Y.; Wang, M.; Luo, X. SAR signal reconstruction from multi-channel non-uniform sampling near singular points. Remote Sens. Lett. 2015, 6, 106–115. [Google Scholar] [CrossRef]
- Liu, B.; He, Y. Improved DBF Algorithm for Multichannel High-Resolution Wide-Swath SAR. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1209–1225. [Google Scholar] [CrossRef]
- Liu, N.; Wang, R.; Deng, Y.; Zhao, S.; Wang, X. Modified Multichannel Reconstruction Method of SAR with Highly Nonuniform Spatial Sampling. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 617–627. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, W.; Deng, Y.; Wang, R. Signal Reconstruction Algorithm for Azimuth Multichannel SAR System Based on a Multiobjective Optimization Model. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3881–3893. [Google Scholar] [CrossRef]
- Cheng, P.; Wan, J.; Xin, Q.; Wang, Z.; He, M.; Nian, Y. An Improved Azimuth Reconstruction Method for Multichannel SAR Using Vandermonde Matrix. IEEE Geosci. Remote Sens. Lett. 2017, 14, 67–71. [Google Scholar] [CrossRef]
- Gao, C.G.; Deng, Y.K.; Feng, J. Theoretical analysis on the mismatch influence of displaced phase center multiple-beam SAR systems. J. Electron. Inf. Technol. 2011, 33, 1828–1832. [Google Scholar] [CrossRef]
- Queiroz de Almeida, F.; Younis, M.; Krieger, G.; Moreira, A. An Analytical Error Model for Spaceborne SAR Multichannel Azimuth Reconstruction. IEEE Geosci. Remote Sens. Lett. 2018, 15, 853–857. [Google Scholar] [CrossRef]
- Xiao, F.; Ding, Z.; Li, Z.; Long, T. Channel Error Effect Analysis for Reconstruction Algorithm in Dual-Channel SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1563–1567. [Google Scholar] [CrossRef]
- Li, Z.; Bao, Z.; Wang, H.; Liao, G. Performance improvement for constellation SAR using signal processing techniques. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 436–452. [Google Scholar] [CrossRef]
- Guo, X.; Gao, Y.; Wang, K.; Liu, X. Improved Channel Error Calibration Algorithm for Azimuth Multichannel SAR Systems. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1022–1026. [Google Scholar] [CrossRef]
- Huaitao, F.; Zhimin, Z.; Ning, L. Channel phase mismatch calibration for multichannel in azimuth SAR imaging based on Eigen-structure method. J. Radars 2018, 7, 346–354. [Google Scholar]
- Zhou, Y.; Wang, R.; Deng, Y.; Yu, W.; Fan, H.; Liang, D.; Zhao, Q. A Novel Approach to Doppler Centroid and Channel Errors Estimation in Azimuth Multi-Channel SAR. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8430–8444. [Google Scholar] [CrossRef]
- Sun, G.; Xiang, J.; Xing, M.; Yang, J.; Guo, L. A Channel Phase Error Correction Method Based on Joint Quality Function of GF-3 SAR Dual-Channel Images. Sensors 2018, 18, 3131. [Google Scholar] [CrossRef]
- Sun, G.C.; Xiang, J.; Wang, Y.; Zhang, Z.; Yang, J.; Xing, M.; Bao, M.; Bao, Z. A Postmatched-Filtering Image-Domain Subspace Method for Channel Mismatch Estimation of Multiple Azimuth Channels SAR. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Feng, J.; Gao, C.; Zhang, Y.; Wang, R. Phase Mismatch Calibration of the Multichannel SAR Based on Azimuth Cross Correlation. IEEE Geosci. Remote Sens. Lett. 2013, 10, 903–907. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Z.; Wang, Z.; Bao, Z. On the Baseband Doppler Centroid Estimation for Multichannel HRWS SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2014, 11, 2050–2054. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, Y.; Liu, X. Robust Channel Phase Error Calibration Algorithm for Multichannel High-Resolution and Wide-Swath SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2017, 14, 649–653. [Google Scholar] [CrossRef]
- Huang, H.; Huang, P.; Liu, X.; Xia, X.G.; Deng, Y.; Fan, H.; Liao, G. A Novel Channel Errors Calibration Algorithm for Multichannel High-Resolution and Wide-Swath SAR Imaging. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–19. [Google Scholar] [CrossRef]
- Zhang, S.X.; Xing, M.D.; Xia, X.G.; Liu, Y.Y.; Guo, R.; Bao, Z. A Robust Channel-Calibration Algorithm for Multi-Channel in Azimuth HRWS SAR Imaging Based on Local Maximum-Likelihood Weighted Minimum Entropy. IEEE Trans. Image Process. 2013, 22, 5294–5305. [Google Scholar] [CrossRef] [PubMed]
- Xiang, J.; Ding, X.; Sun, G.C.; Zhang, Z.; Xing, M.; Liu, W. An Efficient Multichannel SAR Channel Phase Error Calibration Method Based on Fine-Focused HRWS SAR Image Entropy. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 7873–7885. [Google Scholar] [CrossRef]
- Liang, D.; Wang, R.; Deng, Y.; Fan, H.; Zhang, H.; Zhang, L.; Wang, W.; Zhou, Y. A Channel Calibration Method Based on Weighted Backprojection Algorithm for Multichannel SAR Imaging. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1254–1258. [Google Scholar] [CrossRef]
- Cai, Y.; Lu, P.; Li, B.; Li, J.; Chen, Y.; Wang, Y.; Nan, Y.; Wang, R.; Wu, Y. An Efficient Phase Error Calibration Method for Azimuth Multichannel SAR Based on Least Spectrum Difference. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–13. [Google Scholar] [CrossRef]
- Ren, Y.; Zheng, M.; Zhang, L.; Fan, H.; Xie, Y. An Adaptive False Target Suppression and Radial Velocity Estimation Method of Moving Targets Based on Image-Domain for High-Resolution and Wide-Swath SAR. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–18. [Google Scholar] [CrossRef]
- Yang, W.; Guo, J.; Chen, J.; Liu, W.; Deng, J.; Wang, Y.; Zeng, H. A Novel Channel Inconsistency Estimation Method for Azimuth Multichannel SAR Based on Maximum Normalized Image Sharpness. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Pan, X.; Zhang, H.; Shu, G. Robust Phase Bias Estimation Method for Azimuth Multi-Channel HRWS SAR System Based on Maximum Modified Kurtosis. Electronics 2022, 11, 3821. [Google Scholar] [CrossRef]
- Xu, Z.; Lu, P.; Cai, Y.; Li, J.; Yang, T.; Wu, Y.; Wang, R. An Efficient Channel Imbalance Estimation Method Based on Subadditivity of Linear Normed Space of Sub-Band Spectrum for Azimuth Multichannel SAR. Remote Sensing 2023, 15, 1561. [Google Scholar] [CrossRef]
- Cai, Y.; Deng, Y.; Zhang, H.; Wang, R.; Wu, Y.; Cheng, S. An Image-Domain Least L1-Norm Method for Channel Error Effect Analysis and Calibration of Azimuth Multi-Channel SAR. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Younis, M.; Huber, S.; Patyuchenko, A.; Bordoni, F.; Krieger, G. Digital beam-forming for spaceborne reflector- and planar-antenna SAR—A system performance comparison. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; Volume 3, pp. III–733–III–736. [Google Scholar] [CrossRef]
- Younis, M.; Rommel, T.; Bordoni, F.; Krieger, G.; Moreira, A. On the Pulse Extension Loss in Digital Beamforming SAR. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1436–1440. [Google Scholar] [CrossRef]
- Feng, F.; Dang, H.; Tan, X.; Li, G.; Li, C. An improved scheme of Digital Beam-Forming in elevation for spaceborne SAR. In Proceedings of the IET International Radar Conference 2013, Xi’an, China, 14–16 April 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Li, Y.; Huang, J.W.; Yu, W.D. Range DBF processing for high-resolution wide-swath spaceborne SAR. J. Electron. Inf. Technol. 2011, 33, 1510–1514. [Google Scholar] [CrossRef]
- Zhao, Q.; Zhang, Y.; Wang, W.; Liu, K.; Deng, Y.; Zhang, H.; Wang, Y.; Zhou, Y.; Wang, R. On the Frequency Dispersion in DBF SAR and Digital Scalloped Beamforming. IEEE Trans. Geosci. Remote Sens. 2020, 58, 3619–3632. [Google Scholar] [CrossRef]
- Wang, W.; Wang, R.; Deng, Y.; Balz, T.; Hong, F.; Xu, W. An improved processing scheme of digital beam-forming in elevation for reducing resource occupation. IEEE Geosci. Remote Sens. Lett. 2016, 13, 309–313. [Google Scholar] [CrossRef]
- Qiu, J.; Zhang, Z.; Wang, R.; Wang, P.; Zhang, H.; Du, J.; Wang, W.; Chen, Z.; Zhou, Y.; Jia, H.; et al. A Novel Weight Generator in Real-Time Processing Architecture of DBF-SAR. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Li, B.; Zhao, Q.; Zhang, Y.; Liang, D.; Wang, W.; Cai, Y.; Li, J.; Lu, P.; Wang, R. An Advanced Sparse Multi-Channel System for Spaceborne DBF-SAR. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–13. [Google Scholar]
- Meng, X.; Zhang, Z.; Wang, W.; Han, C.; Chen, Z.; Qiu, J.; Wen, Y. Demonstration of Intermediate Frequency Digital Beamforming with X-Band and C-Band DBF-SARs. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Villano, M.; Krieger, G.; Jäger, M.; Moreira, A. Staggered SAR: Performance analysis and experiments with real data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6617–6638. [Google Scholar] [CrossRef]
- Villano, M.; Krieger, G.; Moreira, A. Staggered SAR: High-Resolution Wide-Swath Imaging by Continuous PRI Variation. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4462–4479. [Google Scholar] [CrossRef]
- Rosen, P.A.; Kim, Y.; Kumar, R.; Misra, T.; Bhan, R.; Sagi, V.R. Global persistent SAR sampling with the NASA-ISRO SAR (NISAR) mission. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 0410–0414. [Google Scholar] [CrossRef]
- Krieger, G.; Moreira, A.; Zink, M.; Hajnsek, I.; Huber, S.; Villano, M.; Papathanassiou, K.; Younis, M.; Lopez Dekker, P.; Pardini, M.; et al. Tandem-L: Main results of the phase a feasibility study. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 2116–2119. [Google Scholar] [CrossRef]
- Ustalli, N.; Villano, M. High-Resolution Wide-Swath Ambiguous Synthetic Aperture Radar Modes for Ship Monitoring. Remote Sens. 2022, 14. [Google Scholar] [CrossRef]
- Zhou, Z.X.; Deng, Y.; Wang, W.; Jia, X.; Wang, R. Linear Bayesian approaches for low-oversampled stepwise staggered SAR data. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–23. [Google Scholar] [CrossRef]
- Dong, B.; Li, G.; Zhang, Q. High-Resolution and Wide-Swath Imaging of Spaceborne SAR via Random PRF Variation Constrained by the Coverage Diagram. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Chen, Q.; Liu, Y.; Deng, Y.; Wang, R.; Xu, W. Investigation on an ultra–wide-swath, multiple-elevation-beam SAR based on sweep-PRI mode. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2998–3020. [Google Scholar] [CrossRef]
- Yang, X.; Li, G.; Sun, J.; Liu, Y.; Xia, X.G. High-Resolution and Wide-Swath SAR Imaging via Poisson Disk Sampling and Iterative Shrinkage Thresholding. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4692–4704. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, Z.; Qiu, X.; Zhao, Y.; Yu, W. MF-JMoDL-Net: A Sparse SAR Imaging Network for Undersampling Pattern Design Toward Suppressed Azimuth Ambiguity. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–18. [Google Scholar] [CrossRef]
- Luo, X.; Wang, R.; Xu, W.; Deng, Y.; Guo, L. Modification of Multichannel Reconstruction Algorithm on the SAR with Linear Variation of PRI. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3050–3059. [Google Scholar] [CrossRef]
- Wang, X.; Wang, R.; Deng, Y.; Wang, W.; Li, N. SAR signal recovery and reconstruction in staggered mode with low oversampling factors. IEEE Geosci. Remote. Sens. Lett. 2018, 15, 704–708. [Google Scholar] [CrossRef]
- Pinheiro, M.; Prats-Iraola, P.; Rodriguez-Cassola, M.; Villano, M. Combining spectral estimation and BLU interpolation for the reconstruction of low-oversampled staggered SAR data. In Proceedings of the EUSAR 2018—12th European Conference on Synthetic Aperture Radar, Aachen, Germany, 5–7 June 2018; pp. 1–6. [Google Scholar]
- Liu, Z.; Liao, X.; Wu, J. Image Reconstruction for Low-Oversampled Staggered SAR via HDM-FISTA. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, L.; Geng, J.; Liu, H. Image Reconstruction for Low-Oversampled Staggered SAR Based on Bayesian Compressive Sensing. In Proceedings of the IGARSS 2023—2023 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 16–21 July 2023; pp. 7141–7144. [Google Scholar] [CrossRef]
- Huang, H.; Huang, P.; Liu, Y.; Fan, H.; Deng, Y.; Liu, X.; Liao, G. A Novel Method for Staggered SAR Imaging in an Elevation Multichannel System. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–19. [Google Scholar] [CrossRef]
- Sun, M.; Wei, Q.; Yu, Y.; Liu, Z.; Li, W. Nonuniform resampling for staggered SAR. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 4574–4577. [Google Scholar] [CrossRef]
- Liu, M.; Pan, J.; Zhu, J.; Chen, Z.; Zhang, B.; Wu, Y. A Sparse SAR Imaging Method for Low-Oversampled Staggered Mode via Compound Regularization. Remote Sens. 2024, 16, 1459. [Google Scholar] [CrossRef]
- Xu, W.; Hu, J.; Huang, P.; Tan, W.; Gao, Z.; Dong, Y. Continuous PRI Variation and Phase Center Adjustment for Azimuth Uniform Sampling in Staggered SAR. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Villano, M.; Krieger, G.; Moreira, A. A novel processing strategy for staggered SAR. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1891–1895. [Google Scholar] [CrossRef]
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef]
- Queiroz de Almeida, F.; Younis, M.; Krieger, G.; Moreira, A. Multichannel Staggered SAR Azimuth Processing. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2772–2788. [Google Scholar] [CrossRef]
- Motohka, T.; Kankaku, Y.; Miura, S.; Suzuki, S. Overview of ALOS-2 and ALOS-4 L-band SAR. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 8–14 May 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Stringham, C.; Farquharson, G.; Castelletti, D.; Quist, E.; Riggi, L.; Eddy, D.; Soenen, S. The Capella X-band SAR Constellation for Rapid Imaging. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 9248–9251. [Google Scholar] [CrossRef]
- Wang, J.; Li, H.; Zhang, H.; Liu, K.; Deng, Y.; Fan, H.; Wu, Y.; Ren, X.; Guo, S.; Zhou, L. Demonstration of Single-Pass Spaceborne Multi-Baseline InSAR Result of Hongtu-1 Constellation. In Proceedings of the IGARSS 2024—2024 IEEE International Geoscience and Remote Sensing Symposium, Athens, Greece, 7–12 July 2024; pp. 10881–10884. [Google Scholar] [CrossRef]
- López-Dekker, P.; Biggs, J.; Chapron, B.; Hooper, A.; Kääb, A.; Masina, S.; Mouginot, J.; Nardelli, B.B.; Pasquero, C.; Prats-Iraola, P.; et al. The Harmony Mission: End of Phase-0 Science Overview. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 7752–7755. [Google Scholar] [CrossRef]
- Zhang, Y.; Chang, S.; Wang, R.; Deng, Y. An Innovative Push-To-Talk (PTT) Synchronization Scheme for Distributed SAR. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, P.; Wang, R. New Insights Into Alternating Transmitting Mode (ATM) for Bistatic Multichannel SAR. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–16. [Google Scholar] [CrossRef]
- Kraus, T.; Ribeiro, J.P.T.; Bachmann, M.; Steinbrecher, U.; Grigorov, C. Concurrent Imaging for TerraSAR-X: Wide-Area Imaging Paired with High-Resolution Capabilities. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Ribeiro, J.P.T.; Kraus, T.; Bachmann, M.; Machado, R.; Krieger, G.; Moreira, A. Concurrent SAR Imaging with F-Scan: Timing Design and Performance Prediction. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–17. [Google Scholar] [CrossRef]
- Di Martino, G.; Iodice, A. Orthogonal Coprime Synthetic Aperture Radar. IEEE Trans. Geosci. Remote Sens. 2017, 55, 432–440. [Google Scholar] [CrossRef]
- Li, B.; Liang, D.; Nan, Y. Analysis on Nonlinear Dependence of Range Frequency and Time in f-SCAN SAR. In Proceedings of the EUSAR 2024—15th European Conference on Synthetic Aperture Radar, Munich, Germany, 23–26 April 2024; pp. 811–815. [Google Scholar]
- Younis, M.; de Almeida, F.Q.; Bollian, T.; Villano, M.; Krieger, G.; Moreira, A. A Synthetic Aperture Radar Imaging Mode Utilizing Frequency Scan for Time-of-Echo Compression. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–17. [Google Scholar] [CrossRef]
- Li, B.; Liang, D.; Nan, Y.; Li, J.; Lu, P.; Wang, R. A Novel Nonlinear Frequency Scanning SAR Imaging Mode. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–24. [Google Scholar] [CrossRef]
- Wen, Y.; Zhang, Z.; Chen, Z.; Zhao, H.; Zhang, Y.; Fan, H. A Frequency Diverse Array SAR Processing Framework Based on the Segmented Phase Code Waveform for HRWS Imaging. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Younis, M.; de Almeida, F.Q.; Villano, M.; Huber, S.; Krieger, G.; Moreira, A. Digital Beamforming for Spaceborne Reflector-Based Synthetic Aperture Radar, Part 1: Basic imaging modes. IEEE Geosci. Remote Sens. Mag. 2021, 9, 8–25. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, R.; Wang, W.; Yu, W. The Latest Developments in Spaceborne High-Resolution Wide-Swath SAR Systems and Imaging Methods. Sensors 2024, 24, 5978. https://doi.org/10.3390/s24185978
Song R, Wang W, Yu W. The Latest Developments in Spaceborne High-Resolution Wide-Swath SAR Systems and Imaging Methods. Sensors. 2024; 24(18):5978. https://doi.org/10.3390/s24185978
Chicago/Turabian StyleSong, Ruizhen, Wei Wang, and Weidong Yu. 2024. "The Latest Developments in Spaceborne High-Resolution Wide-Swath SAR Systems and Imaging Methods" Sensors 24, no. 18: 5978. https://doi.org/10.3390/s24185978