

A Low-Cost Sensor Network for Monitoring Peatland


Abstract
:1. Introduction
2. Materials and Methods
2.1. System Objectives
- Collect useful and meaningful data for monitoring peatland health.
- Be compatible with the peatland environment.
- Be easy for those unfamiliar with IoT to use.
- Reduce long-term peatland monitoring costs.
2.2. Design Requirements
- Each sensor node should be capable of detecting carbon dioxide, methane, air temperature, humidity, soil moisture and soil temperature levels.
- Each sensor node should take measurements at least hourly.
- The system must be able to operate in the conditions expected for the site—i.e., wet ground, rain, frost−10 to 35 °C, and variable sunlight.
- The system may not rely on any external power supply, such as mains electricity.
- The system should minimise the risk of disturbance or harm to wildlife.
- The system should operate without human interaction for a minimum of 1 month.
- Collected data should be transmitted wirelessly and at least daily.
- The system should be portable and easy to deploy and retrieve.
- The system cost should be comparable to or cheaper than a similar month-long manual study.
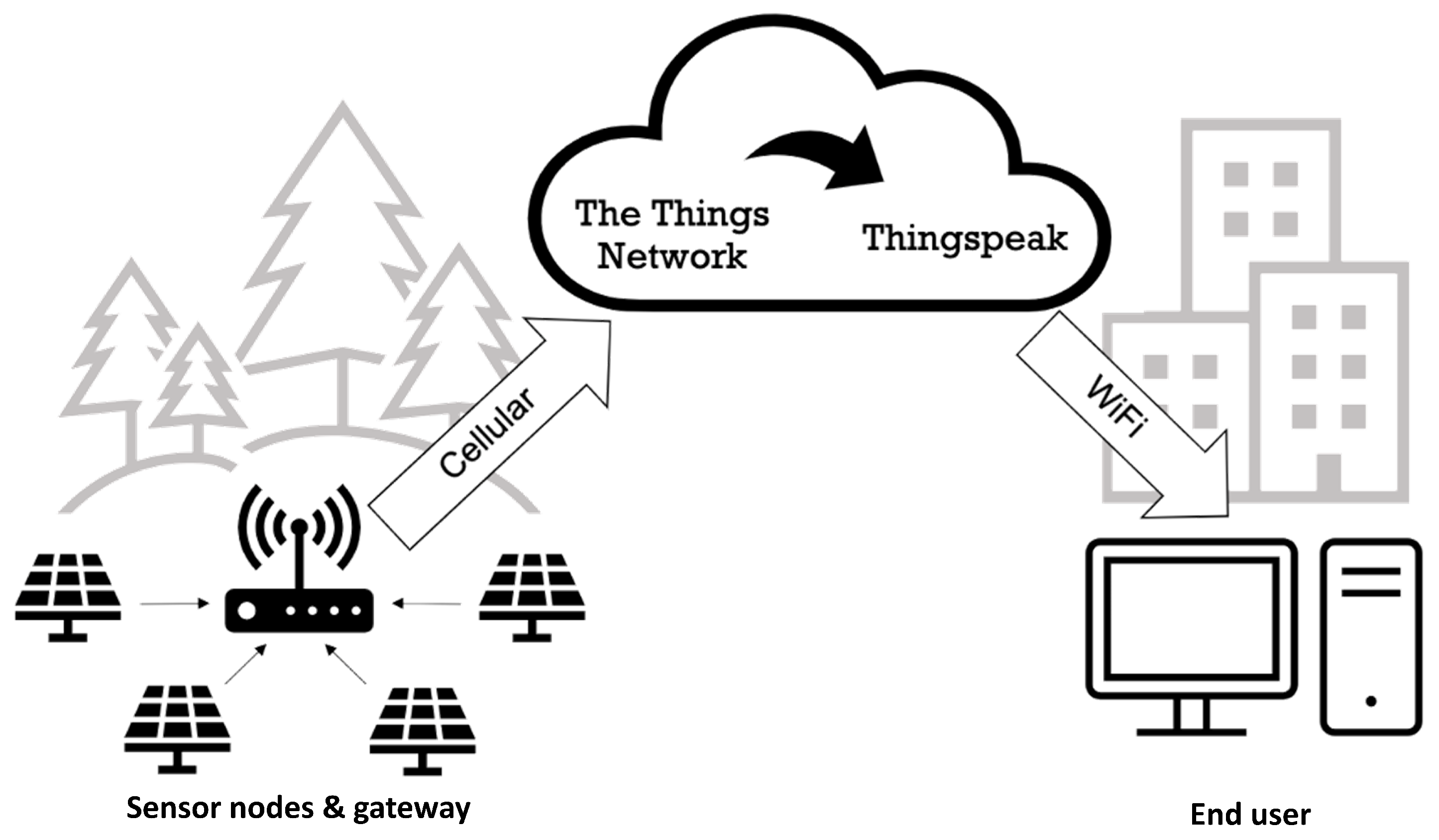
2.3. System Architecture
2.4. Gateway Node
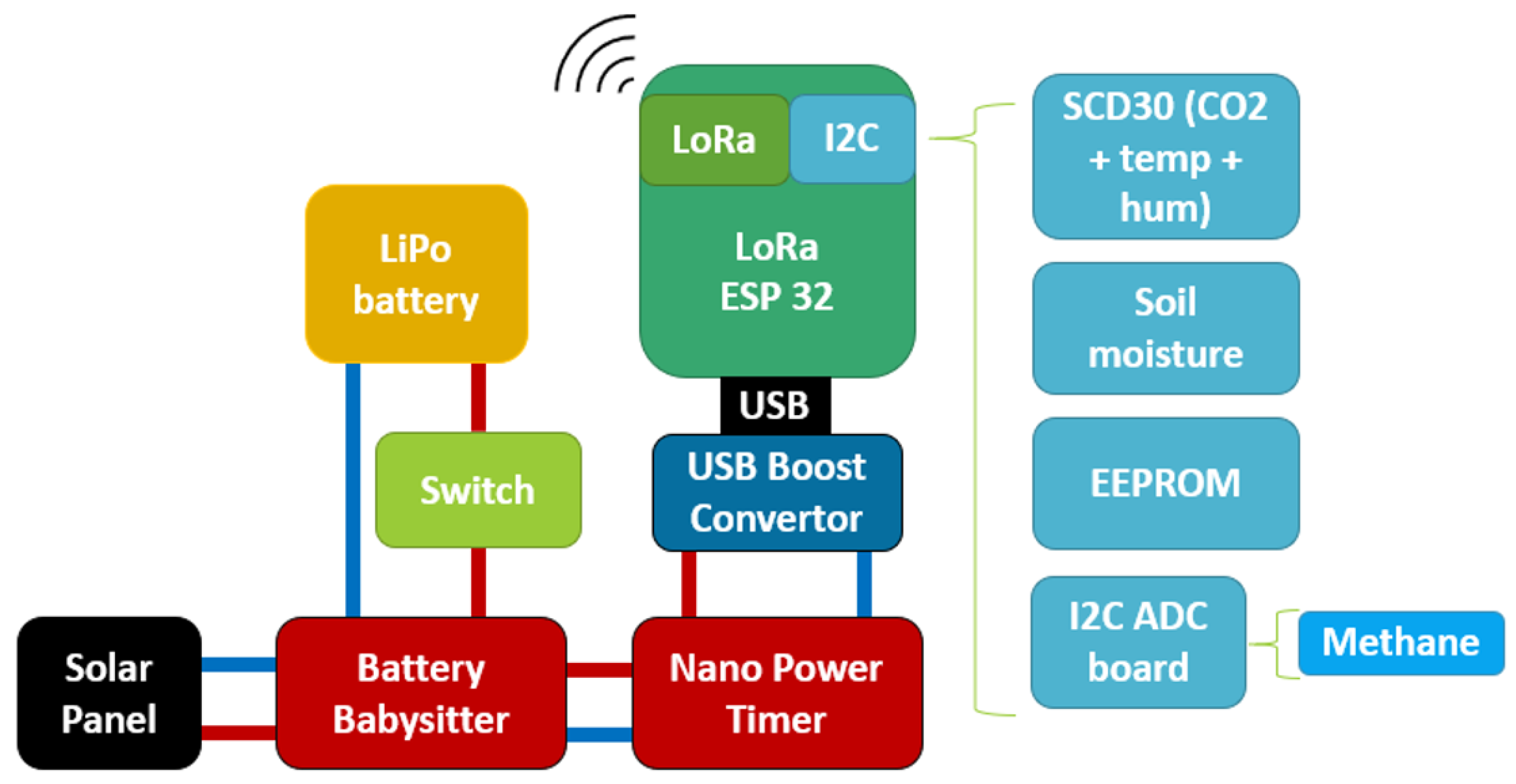
2.5. Sensor Node
2.5.1. Sensor Selection
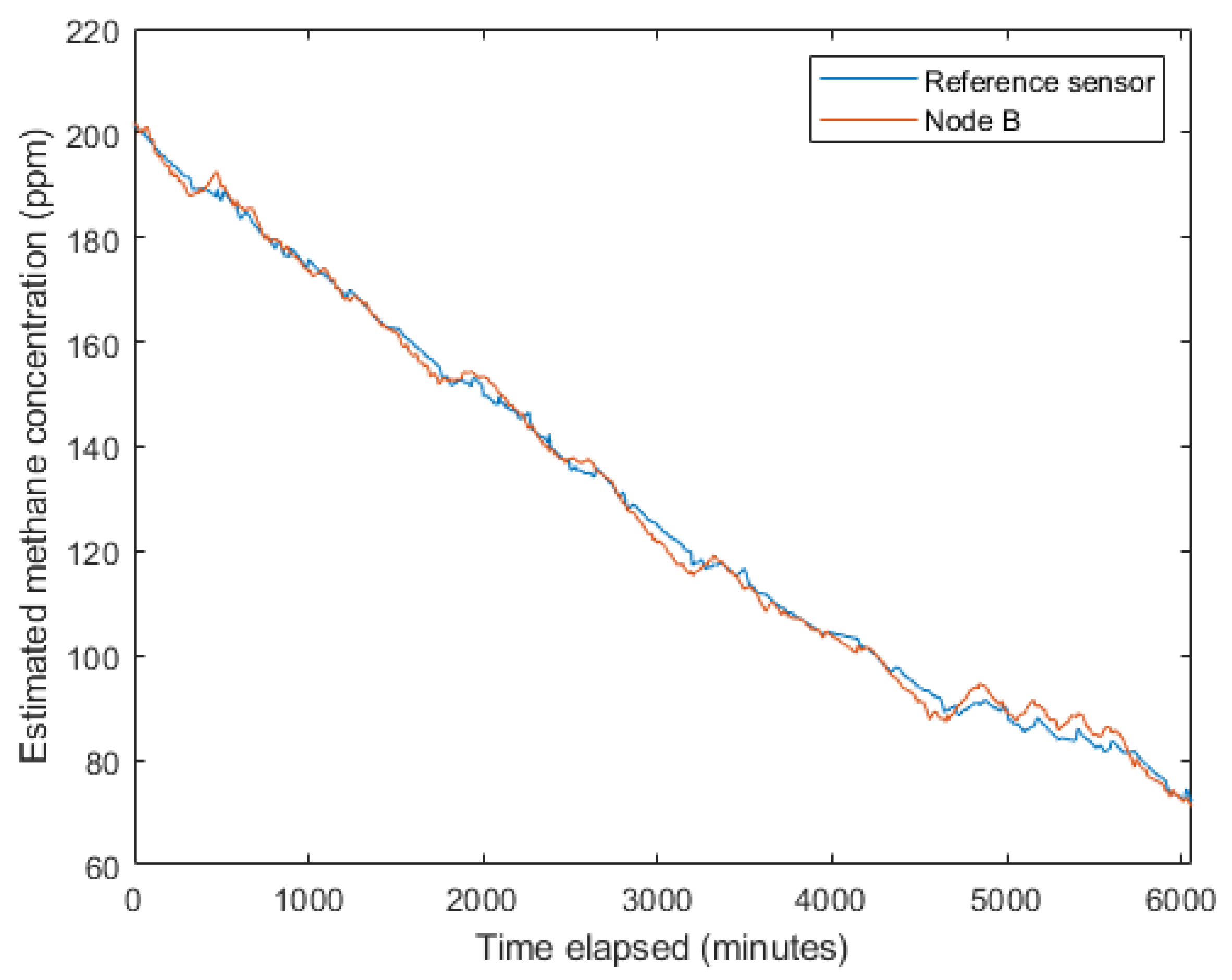
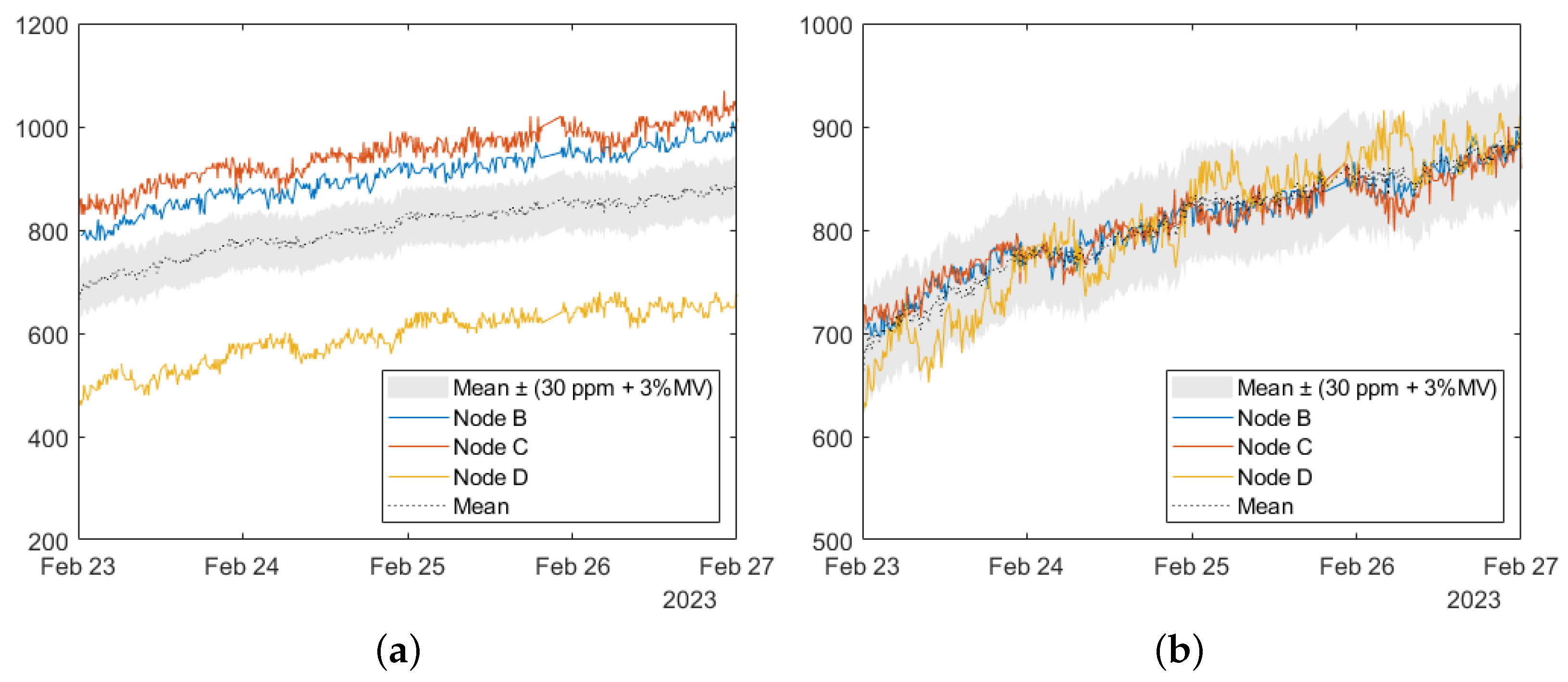
2.5.2. Sensor Calibration
2.5.3. Node Operations
2.5.4. Data Format
- Retrieve the value from a sensor (Reading).
- Round the data to the accuracy of the sensor (Rounded).
- Subtract the minimum possible reading of the sensor from the current value (Vs min).
- Scale up the current value to an integer (Decimal to send).
- Convert the value to hexadecimal nibbles (Hex to send).
- Concatenate the resulting hexadecimal values into a single string for submission.
2.5.5. Error Filtering
- Humidity exceeding 100%
- Temperature exceeding 100 °C
- Temperature below −30 °C
- Battery charge value exceeding 100%
- Extreme outliers for CO2 (outside the range 100 to 3000 ppm)
- Extreme outliers for methane (raw sensor voltage outside the range from 0.4 to 1.6 V)
- Extreme outliers for soil moisture (outside the raw sensor data range of 200 to 1200)
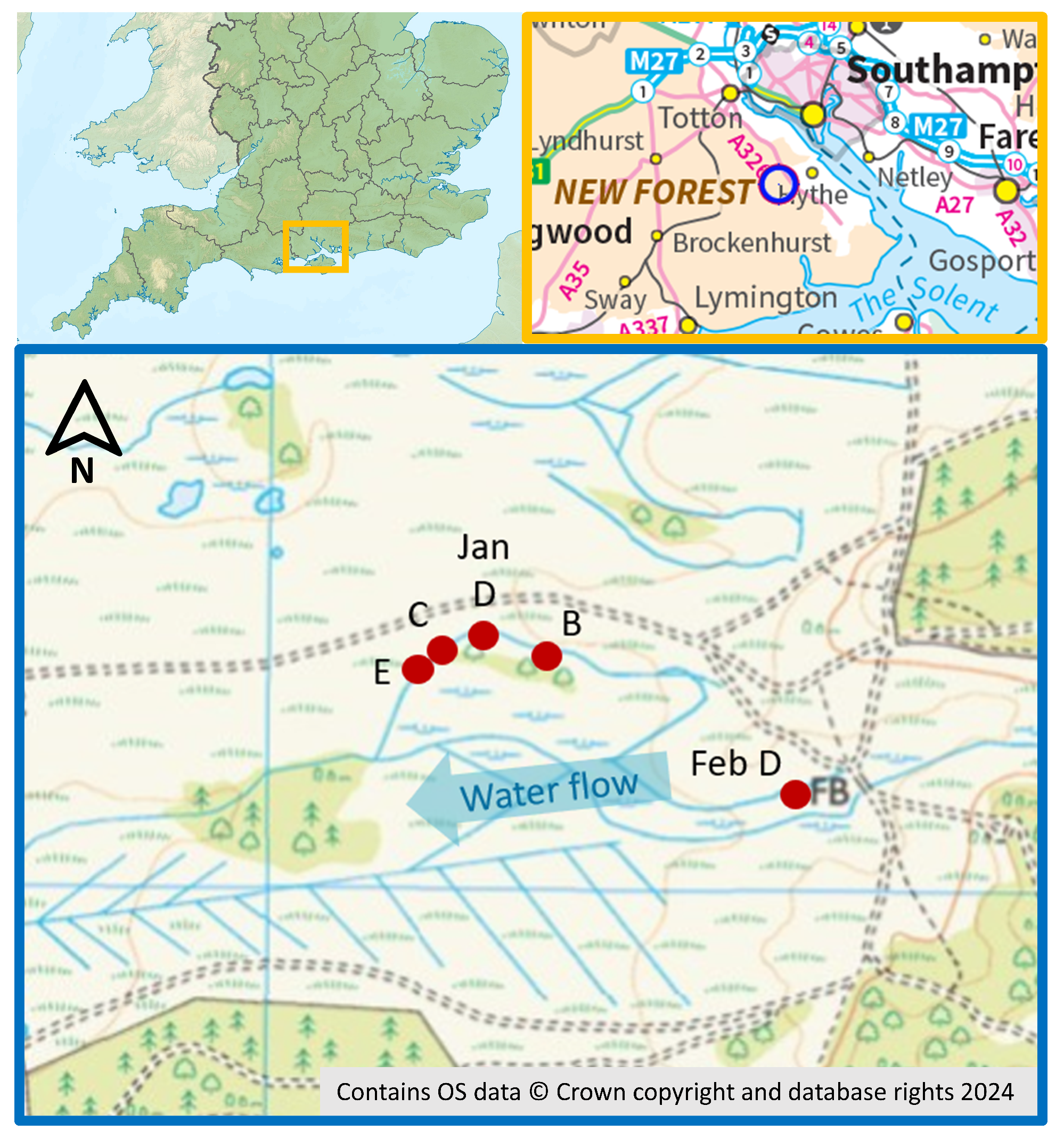
2.6. Site Selection
3. Results
3.1. Overall System Specifications
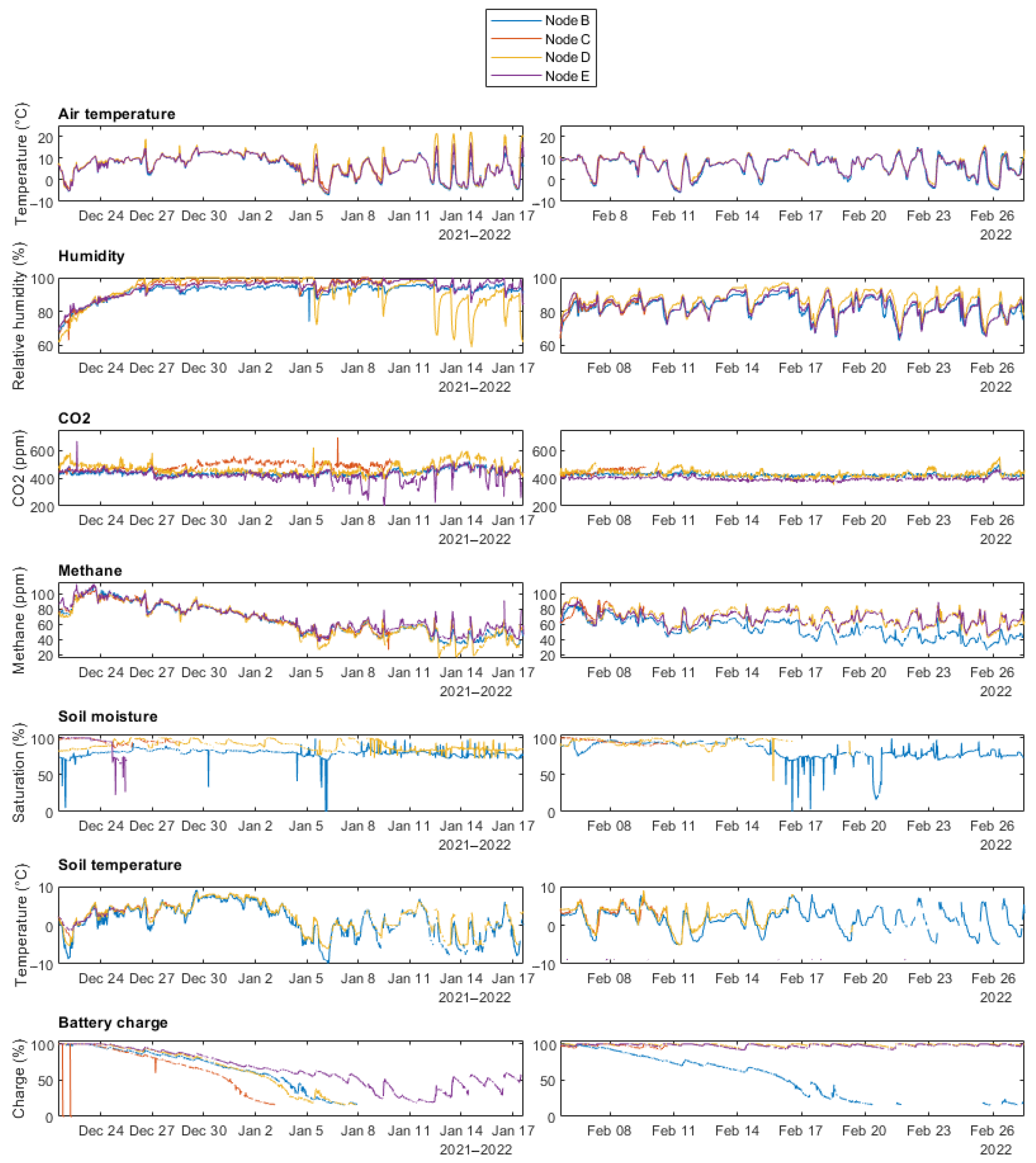
3.2. Recorded Data
3.3. System Performance
3.3.1. Gateway Performance
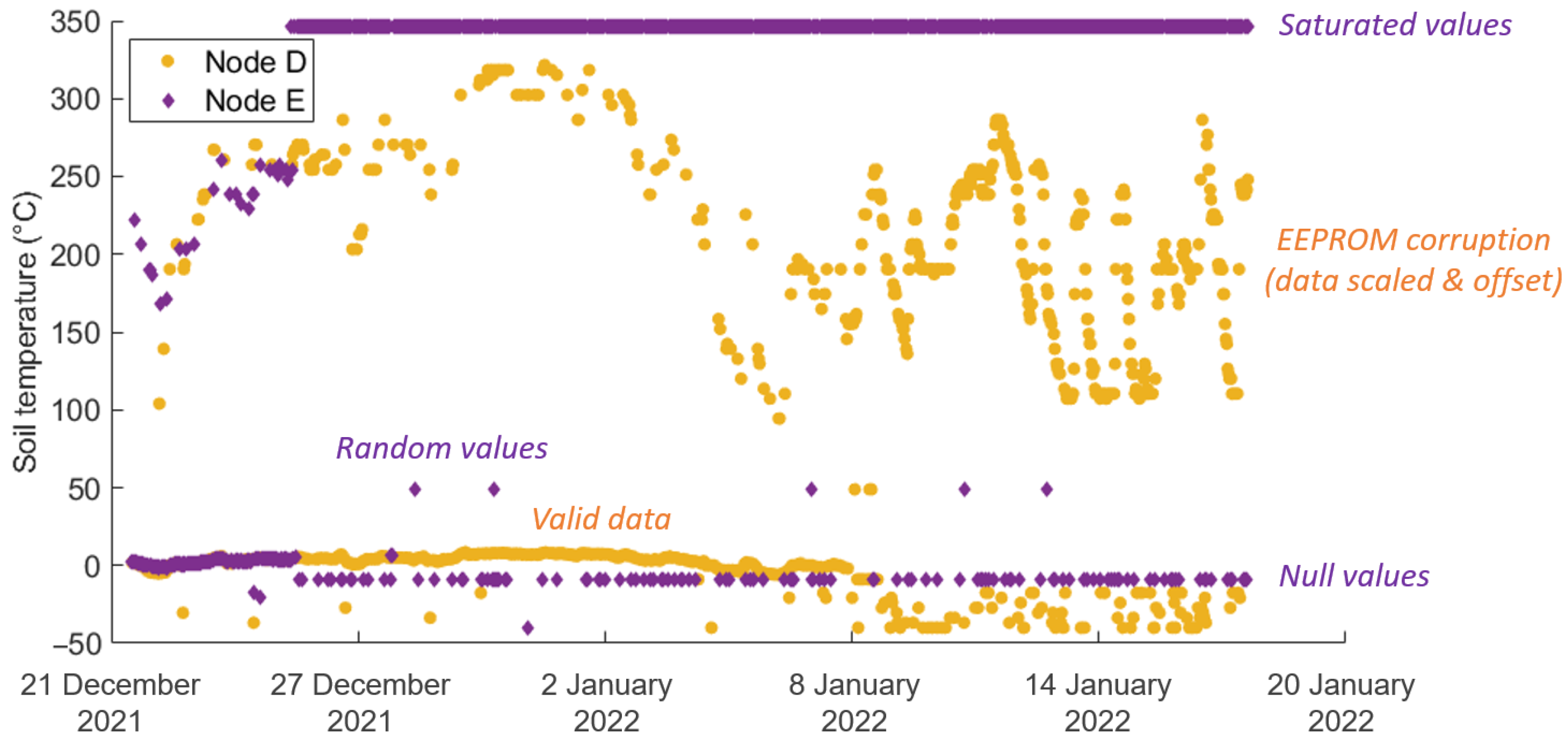
3.3.2. Sensor Issues
- Null values—created when a sensor fails to return a reading. The recorded value will be either zero or the minimum value the sensor can return;
- Saturated values—often caused by sensor faults or disconnection, leading to the maximum possible sensor output being recorded;
- Random values—multiple potential causes, often difficult to diagnose or prevent but usually short-lived and easy to filter out as they often affect multiple sensors in a given node at the same time. Causes may include moisture ingress, unstable wireless communication, or malfunctioning components;
- EEPROM data corruption—errors created when writing to the EEPROM. This issue occurred most commonly when the battery charge fell below 16% and was caused by a bitwise shift in the stored data. This was reversed in post-processing to repair the data.
3.3.3. Limits on Deployment Duration
4. Discussion
4.1. Performance against System Objectives
4.1.1. Objective 1: Useful and Meaningful Data
4.1.2. Objective 2: Compatible with the Peatland Environment
4.1.3. Objective 3: Ease of Use
4.1.4. Objective 4: Long-Term Cost Reduction
4.2. Datastring Encoder
4.3. Limitations and Future Work
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CH4 | Methane |
| CO2 | Carbon Dioxide |
| GHG | Greenhouse Gas |
| PPM | Parts Per Million |
| RH | Relative Humidity |
| RMSE | Root Mean Squared Error |
| SD | Secure Digital |
| WSN | Wireless Sensor Network |
References
- Birkin, L.J.; Bailey, S.; Brewis, F.E.; Bruneau, P.; Crosher, I.; Dobbie, K.; Hill, C.; Johnson, S.; Jones, P.; Shepherd, M.J.; et al. The Requirement for Improving Greenhouse Gases Flux Estimates for Peatlands in the UK; JNCC Report, No. 457; Joint Nature Conservation Committee: Peterborough, UK, 2011. [Google Scholar]
- Frolking, S.; Roulet, N.T. Holocene radiative forcing impact of northern peatland carbon accumulation and methane emissions. Glob. Chang. Biol. 2007, 13, 1079–1088. [Google Scholar] [CrossRef]
- Minke, M.; Freibauer, A.; Yarmashuk, T.; Burlo, A.; Harbachova, H.; Schneider, A.; Tikhonov, V.V.; Augustin, J. Flooding of an abandoned fen by beaver led to highly variable greenhouse gas emissions. Mires Peat 2020, 26, 1–24. [Google Scholar]
- Kalhori, A.; Wille, C.; Gottschalk, P.; Li, Z.; Hashemi, J.; Kemper, K.; Sachs, T. Temporally dynamic carbon dioxide and methane emission factors for rewetted peatlands. Commun. Earth Environ. 2024, 5, 62. [Google Scholar] [CrossRef]
- Sloan, T.J.; Payne, R.J.; Anderson, A.R.; Bain, C.; Chapman, S.; Cowie, N.; Gilbert, P.; Lindsay, R.; Mauquoy, D.; Newton, A.J.; et al. Peatland afforestation in the UK and consequences for carbon storage. Mires Peat 2018, 23, 1–17. [Google Scholar]
- Bonnett, S.A.F.; Ross, S.; Linstead, C.; Malty, E. A Review of Techniques for Monitoring the Success of Peatland Restoration; Natural England Commissioned Reports, Number 086; University of Liverpool: Liverpool, UK, 2009. [Google Scholar]
- Sinclair, A.L.; Graham, L.L.B.; Grover, S.P. More field-based carbon monitoring of tropical peatland restoration is urgently needed: Findings from a systematic literature review. Mires Peat 2024, 30, 23. [Google Scholar]
- Petrescu, A.M.R.; Lohila, A.; Tuovinen, J.P.; Baldocchi, D.D.; Desai, A.R.; Roulet, N.T.; Vesala, T.; Dolman, A.J.; Oechel, W.C.; Marcolla, B.; et al. The uncertain climate footprint of wetlands under human pressure. Proc. Natl. Acad. Sci. USA 2015, 112, 4594–4599. [Google Scholar] [CrossRef]
- Bansal, S.; Creed, I.F.; Tangen, B.A.; Bridgham, S.D.; Desai, A.R.; Krauss, K.W.; Neubauer, S.C.; Noe, G.B.; Rosenberry, D.O.; Trettin, C.; et al. Practical Guide to Measuring Wetland Carbon Pools and Fluxes. Wetlands 2023, 43, 105. [Google Scholar] [CrossRef]
- Deliry, S.I.; Avdan, U. Accuracy of Unmanned Aerial Systems Photogrammetry and Structure from Motion in Surveying and Mapping: A Review. J. Indian Soc. Remote Sens. 2021, 49, 1997–2017. [Google Scholar] [CrossRef]
- Jeziorska, J. UAS for Wetland Mapping and Hydrological Modeling. Remote Sens. 2019, 11, 1997. [Google Scholar] [CrossRef]
- Brown, E.; Aitkenhead, M.; Wright, R.; Aalders, I.H. Mapping and classification of Peatland on the Isle of Lewis using Landsat ETM+. Scott. Geogr. J. 2007, 123, 173–192. [Google Scholar] [CrossRef]
- Lees, K.J.; Quaife, T.; Artz, R.R.E.; Khomik, M.; Clark, J.M. Potential for Using Remote Sensing to Estimate Carbon Fluxes across Northern Peatlands—A Review. Sci. Total. Environ. 2018, 615, 857–874. [Google Scholar] [CrossRef] [PubMed]
- Miorandi, D.; Sicari, S.; De Pellegrini, F.; Chlamtac, I. Internet of things: Vision, applications and research challenges. Ad Hoc Netw. 2012, 10, 1497–1516. [Google Scholar] [CrossRef]
- Nahrstedt, K.; Lopresti, D.; Zorn, B.; Drobnis, A.W.; Mynatt, B.; Patel, S.; Wright, H.V. Smart Communities Internet of Things: A White Paper Prepared for the Computing Community Consortium Committee of the Computing Research Association. Available online: http://cra.org/ccc/resources/ccc-led-whitepapers/ (accessed on 17 September 2024).
- Basford, P.J.; Bulot, F.M.J.; Apetroaie-Cristea, M.; Cox, S.J.; Ossont, S.J. LoRaWAN for Smart City IoT Deployments: A Long Term Evaluation. Sensors 2020, 20, 648. [Google Scholar] [CrossRef] [PubMed]
- Loriot, M.; Aljer, A.; Shahrour, I. Analysis of the use of lorawan technology in a large-scale smart city demonstrator. In Proceedings of the 2017 Sensors Networks Smart and Emerging Technologies (SENSET), Beirut, Lebanon, 12–14 September 2017; pp. 1–4. [Google Scholar]
- Aberer, K.; Sathe, S.; Chakraborty, D.; Martinoli, A.; Barrenetxea, G.; Faltings, B.; Thiele, L. Opensense: Open community driven sensing of environment. In Proceedings of the ACM SIGSPATIAL International Workshop on GeoStreaming, San Jose, CA, USA, 2 November 2010; Volume 9, pp. 39–42. [Google Scholar]
- Johnston, S.J.; Basford, P.J.; Bulot, F.M.J.; Apetroaie-Cristea, M.; Easton, N.H.C.; Davenport, C.; Foster, G.L.; Loxham, M.; Morris, A.K.R.; Cox, S.J. City Scale Particulate Matter Monitoring Using LoRaWAN Based Air Quality IoT Devices. Sensors 2019, 19, 209. [Google Scholar] [CrossRef] [PubMed]
- ISO/IEC 30141:2018; Internet of Things (IoT)—Reference Architecture. ISO: Geneva, Switzerland, 2018. Available online: https://standards.iso.org/ittf/PubliclyAvailableStandards/c065695_ISO_IEC_30141_2018(E).zip (accessed on 25 May 2022).
- Mazhelis, O.; Luoma, E.; Warma, H. Defining an Internet-of-Things Ecosystem. In Internet of Things, Smart Spaces, and Next Generation Networking; Andreev, S., Balandin, S., Koucheryavy, Y., Eds.; ruSMART NEW2AN 2012; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7469, pp. 1–14. [Google Scholar]
- Wilson, D.; Blain, D.; Couwenberg, J.; Evans, C.D.; Murdiyarso, D.; Page, S.; Renou-Wilson, F.; Rieley, J.; Sirin, A.; Strack, M.; et al. Greenhouse gas emission factors associated with rewetting of organic soils. Mires Peat 2016, 17, 1–28. [Google Scholar]
- Darusman, T.; Murdiyarso, D.; Impron; Anas, I. Effect of rewetting degraded peatlands on carbon fluxes: A meta-analysis. Mitig Adapt. Strateg. Glob Chang. 2016, 28, 10. [Google Scholar] [CrossRef]
- He, T.; Ding, W.; Cheng, X.; Cai, Y.; Zhang, Y.; Xia, H.; Wang, X.; Zhang, J.; Zhang, K.; Zhang, Q. Meta-analysis shows the impacts of ecological restoration on greenhouse gas emissions. Nat. Commun. 2024, 15, 2668. [Google Scholar] [CrossRef]
- Chimner, R.A.; Cooper, D.J.; Wurster, F.C.; Rochefort, L. An overview of peatland restoration in North America: Where are we after 25 years? Restor. Ecol. 2017, 25, 283–292. [Google Scholar] [CrossRef]
- Czapiewski, S.; Szumińska, D. An Overview of Remote Sensing Data Applications in Peatland Research Based on Works from the Period 2010–2021. Land 2022, 11, 24. [Google Scholar] [CrossRef]
- Millard, K.; Richardson, M. Quantifying the relative contributions of vegetation and soil moisture conditions to polarimetric C-Band SAR response in a temperate peatland. Remote Sens. Environ. 2018, 206, 123–138. [Google Scholar] [CrossRef]
- Ikkala, L.; Ronkanen, A.-K.; Ilmonen, J.; Similä, M.; Rehell, S.; Kumpula, T.; Päkkilä, L.; Klöve, B.; Marttila, H. Unmanned Aircraft System (UAS) Structure-From-Motion (SfM) for Monitoring the Changed Flow Paths and Wetness in Minerotrophic Peatland Restoration. Remote Sens. 2022, 14, 3169. [Google Scholar] [CrossRef]
- Szporak-Wasilewska, S.; Piórkowski, H.; Ciężkowski, W.; Jarzombkowski, F.; Sławik, Ł.; Kopeć, D. Mapping Alkaline Fens, Transition Mires and Quaking Bogs Using Airborne Hyperspectral and Laser Scanning Data. Remote Sens. 2021, 13, 1504. [Google Scholar] [CrossRef]
- Junttila, S.; Kelly, J.; Kljun, N.; Aurela, M.; Klemedtsson, L.; Lohila, A.; Nilsson, M.B.; Rinne, J.; Tuittila, E.-S.; Vestin, P.; et al. Upscaling Northern Peatland CO2 Fluxes Using Satellite Remote Sensing Data. Remote Sens. 2021, 13, 818. [Google Scholar] [CrossRef]
- Reed, M.S.; Young, D.M.; Taylor, N.G.; Andersen, R.; Bell, N.G.A.; Cadillo-Quiroz, H.; Grainger, M.; Heinemeyer, A.; Hergoualc’h, K.; Gerrand, A.M.; et al. Peatland core domain sets: Building consensus on what should be measured in research and monitoring. Mires and Peat 2020, 28, 26. Available online: http://mires-and-peat.net/pages/volumes/map28/map2826.php (accessed on 17 September 2024).
- Evju, M.; Hagen, D.; Kyrkjeeide, M.O.; Köhler, B. Learning from scientific literature: Can indicators for measuring success be standardized in “on the ground” restoration? Restor. Ecol. 2020, 28, 519–531. [Google Scholar] [CrossRef]
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. A comparative study of LPWAN technologies for large-scale IoT deployment. ICT Express 2018, 5, 1–7. [Google Scholar] [CrossRef]
- Sigfox Website. Available online: https://www.sigfox.com/coverage/ (accessed on 22 May 2024).
- Thingspeak. Available online: https://www.thethingsnetwork.org/ (accessed on 22 May 2024).
- The Things Network. Available online: https://thingspeak.com/ (accessed on 22 May 2024).
- Milesight Semi-Industrial LoRaWAN® Gateway UG65. Available online: https://www.milesight.com/iot/product/lorawan-gateway/ug65 (accessed on 10 July 2024).
- Epever Solar Charge Controller Datasheet. Available online: https://www.epever.com/wp-content/uploads/2021/05/LS-E-EU-SMS-EL-V2.0.pdf (accessed on 22 May 2024).
- Global Photovoltaic Power Potential by Country. Available online: https://globalsolaratlas.info/download/united-kingdom (accessed on 21 September 2023).
- WiFi LoRa 32 (V2) LoRa Node Development Kit. Available online: https://resource.heltec.cn/download/WiFi_LoRa_32/WiFi%20Lora32.pdf (accessed on 4 September 2024).
- Sensirion SCD30 Sensor Module Datasheet. Available online: https://sensirion.com/media/documents/4EAF6AF8/61652C3C/Sensirion_CO2_Sensors_SCD30_Datasheet.pdf (accessed on 22 May 2024).
- Adafruit STEMMA Soil Sensor—I2C Capacitive Moisture Sensor Product Information. Available online: https://learn.adafruit.com/adafruit-stemma-soil-sensor-i2c-capacitive-moisture-sensor/overview (accessed on 22 May 2024).
- Technical Information for TGS2611. Available online: https://www.figarosensor.com/product/docs/Long2611CE%20Layout%20(1117).pdf (accessed on 21 September 2023).
- Mitchell, H.L.; Cox, S.J.; Lewis, H.G. Calibration of a Low-Cost Methane Sensor Using Machine Learning. Sensors 2024, 24, 1066. [Google Scholar] [CrossRef]
- Warm but Dull Month for December 2021. Available online: https://blog.metoffice.gov.uk/2022/01/04/december2021weather/ (accessed on 22 May 2024).
- Jauhiainen, J.; Alm, J.; Bjarnadottir, B.; Callesen, I.; Christiansen, J.R.; Clarke, N.; Dalsgaard, L.; He, H.; Jordan, S.; Kazanavičiūtė, V.; et al. Reviews and syntheses: Greenhouse gas exchange data from drained organic forest soils–a review of current approaches and recommendations for future research. Biogeosciences 2019, 16, 4687–4703. [Google Scholar] [CrossRef]
- Tuittila, E.-S.; Komulainen, V.-M.; Vasander, H.; Nykänen, H.; Martikainen, P.J.; Laine, J. Methane dynamics of a restored cut-away peatland. Glob. Chang. Biol. 2000, 6, 569–581. [Google Scholar] [CrossRef]
- Christen, A.; Jassal, R.S.; Black, T.A.; Grant, N.J.; Hawthorne, I.; Johnson, M.S.; Lee, S.-C.; Merkens, M. Summertime greenhouse gas fluxes from an urban bog undergoing restoration through resetting. Mires Peat 2016, 17, 1–24. [Google Scholar]
- Rinne, J.; Tuittila, E.S.; Peltola, O.; Li, X.; Raivonen, M.; Alekseychik, P.; Haapanala, S.; Pihlatie, M.; Aurela, M.; Mammarella, I.; et al. Temporal variation of ecosystem scale methane emission from a boreal fen in relation to temperature, water table position, and carbon dioxide fluxes. Glob. Biogeochem. Cycles 2018, 32, 1087–1106. [Google Scholar] [CrossRef]
- Carbon Farming: Measuring Carbon Flux on Irish Farms. Available online: https://www.farmersjournal.ie/farm-programmes/footprint-farmers/carbon-farming-measuring-carbon-flux-on-irish-farms-790756 (accessed on 4 September 2024).
- IPCC Land Use, Land-Use Change and Forestry. 2000. Available online: https://archive.ipcc.ch/ipccreports/sres/land_use/index.php?idp=86 (accessed on 4 September 2024).
- New Use for Old Technology Set to Make Measuring Soil Carbon More Affordable. Available online: https://www.sqlandscapes.org.au/new-use-for-old-technology-set-to-make-measuring-soil-carbon-more-affordable (accessed on 4 September 2024).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reading | Rounded | Vs min | Decimal to Send | Hex to Send | |
|---|---|---|---|---|---|
| Min. temperature | −40 | −40 | 0 | 0 | 0 |
| Max. temperature | 70 | 70 | 110 | 1100 | 44C |
| Example temperature | 32.62 | 32.6 | 72.6 | 726 | 2D6 |
| Parameter | Value |
|---|---|
| Sensor node mass | 1 kg |
| Gateway node mass | 5.6 kg |
| Total system mass | 9.6 kg |
| Materials cost | £1350 1 |
| Monthly running costs | £8 1 |
| Sampling interval | 30 min |
| Maximum theoretical deployment | 121 days 2 |
| Tested continuous deployment | 28 days |
| Measured variables | Air temperature, relative humidity, CO2 concentration, methane concentration, soil moisture, surface soil temperature, battery charge level |
| Without Encoder | With Encoder | Units | |
|---|---|---|---|
| System voltage | 5 | V | |
| Measurements per day | 48 | ||
| Measurement current | 0.5 | A | |
| Measurement power | 2.5 | W | |
| Measurement duration | 60 | s | |
| Total measurement duration | 2880 | s/day | |
| Total measurement energy | 2 | Wh/day | |
| Transmit current | 0.13 | A | |
| Transmit power | 0.65 | W | |
| Transmit duration | 60 | 46.2 | s |
| Total transmit duration | 2880 | 2217.6 | s/day |
| Total transmit energy | 0.52 | 0.4004 | Wh/day |
| Sleep current | 0.0008 | A | |
| Sleep power | 0.004 | W | |
| Total sleep duration | 80640 | 81302.4 | s/day |
| Total sleep energy | 0.0896 | 0.090336 | Wh/day |
| Total energy | 2.6096 | 2.490736 | Wh/day |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mitchell, H.L.; Cox, S.J.; Lewis, H.G. A Low-Cost Sensor Network for Monitoring Peatland. Sensors 2024, 24, 6019. https://doi.org/10.3390/s24186019
Mitchell HL, Cox SJ, Lewis HG. A Low-Cost Sensor Network for Monitoring Peatland. Sensors. 2024; 24(18):6019. https://doi.org/10.3390/s24186019
Chicago/Turabian StyleMitchell, Hazel Louise, Simon J. Cox, and Hugh G. Lewis. 2024. "A Low-Cost Sensor Network for Monitoring Peatland" Sensors 24, no. 18: 6019. https://doi.org/10.3390/s24186019