
A Universal Model for Ultrasonic Energy Transmission in Various Media


Abstract
:1. Introduction
- The ultrasonic energy transmission model, combined with the actual application environment, is established to illustrate the entire power transfer process from the transmitting source to the load, reflecting the impact of parameter changes in the actual application of the transducer on the system.
- The model thoroughly analyzes the link losses in ultrasonic energy transmission, developing and verifying results across different application scenarios, including the influence of transducer size, frequency, and transmission medium.
- The model provides essential guidance for designing ultrasonic energy transmission systems. By considering link losses and the application environment, methods for enhancing system efficiency can be identified and optimized.
2. The UET Model
2.1. System Architecture
2.2. Transmission Link Losses
2.2.1. Electrical Loss
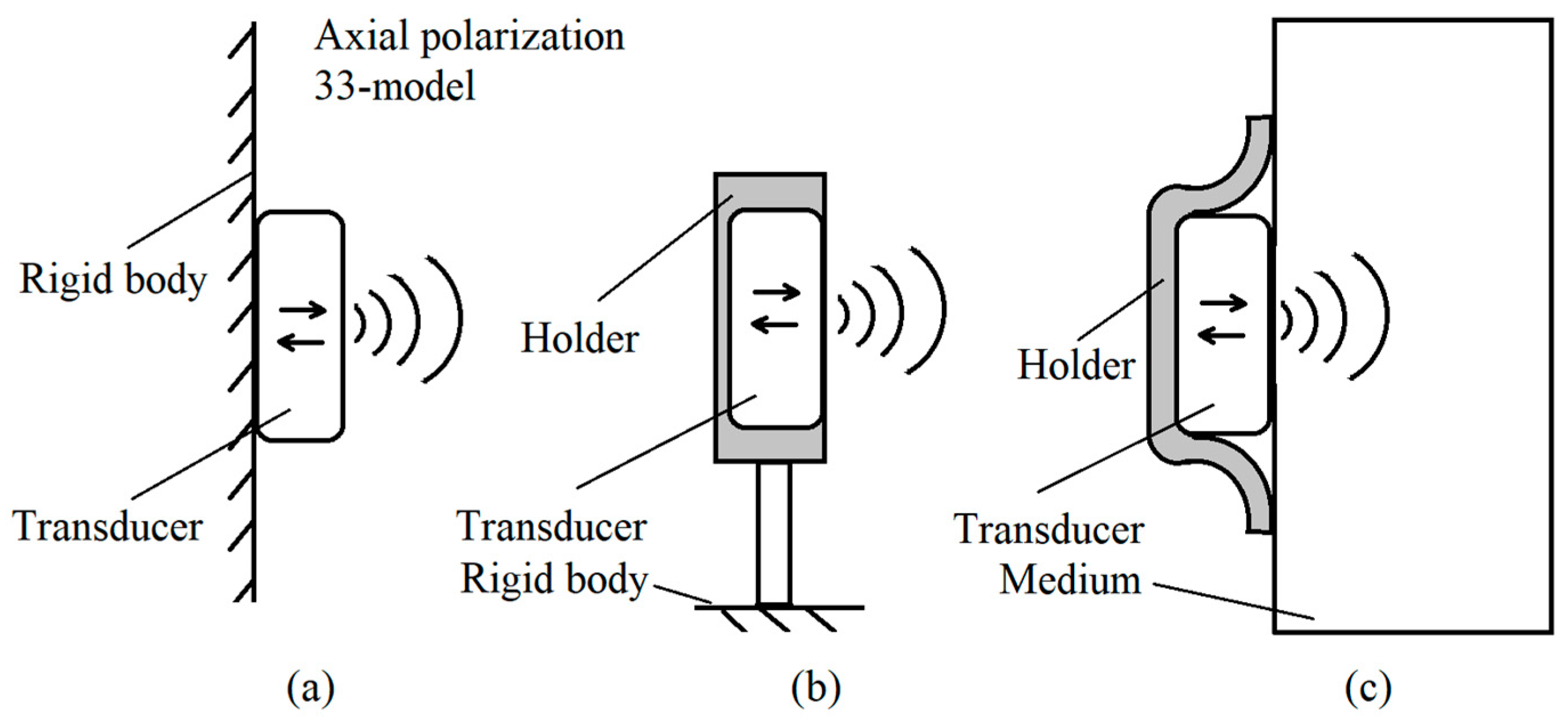
2.2.2. Transducer Loss
2.2.3. Acoustic Loss
2.2.4. Medium Loss
3. Materials and Methods
3.1. Link Loss Measurement
3.1.1. For Electrical Loss
3.1.2. For Transducer Loss
3.1.3. For Acoustic Loss
3.1.4. For Medium Loss
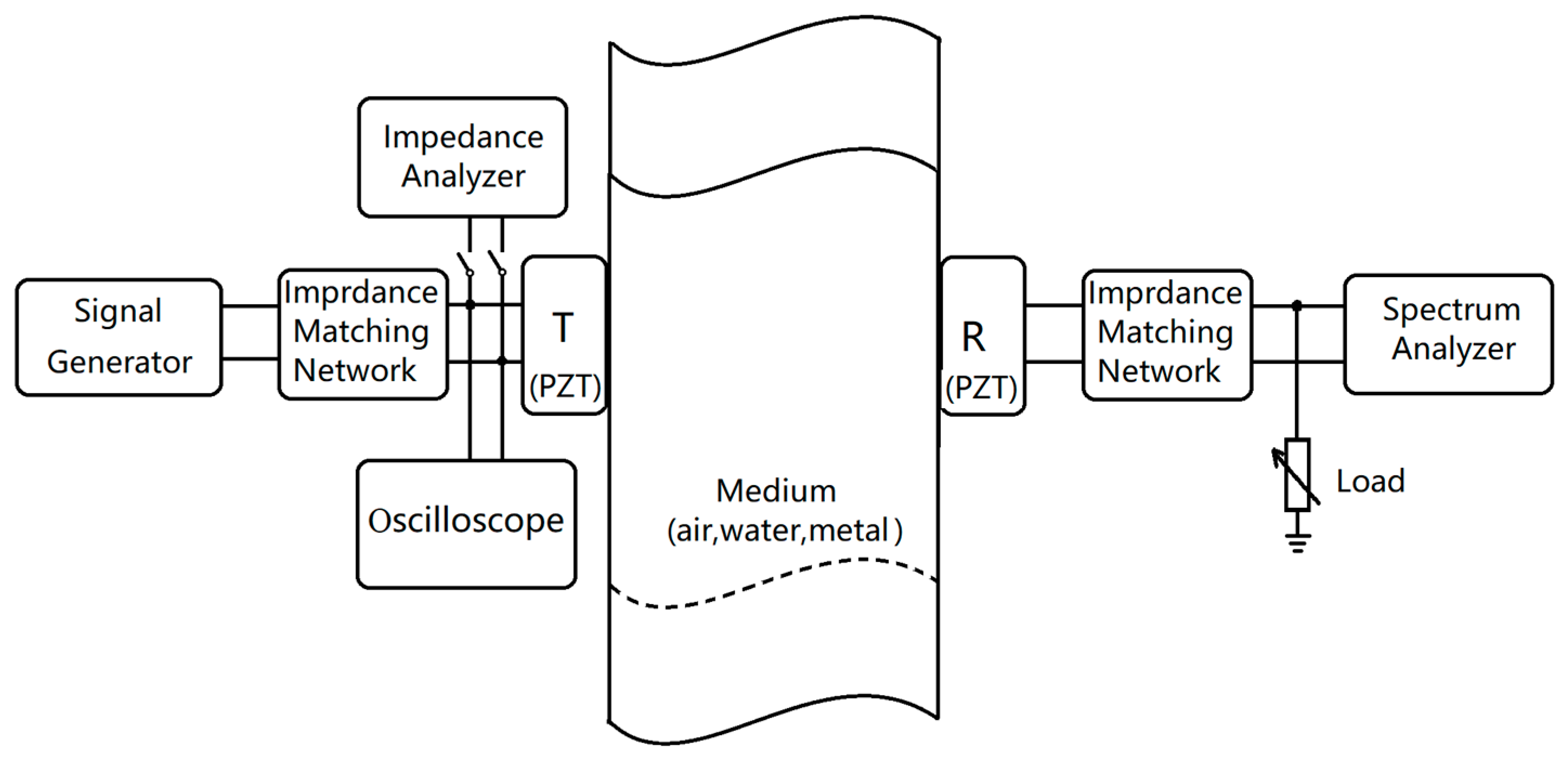
3.2. Experimental Setup
4. Results and Discussion
- I.
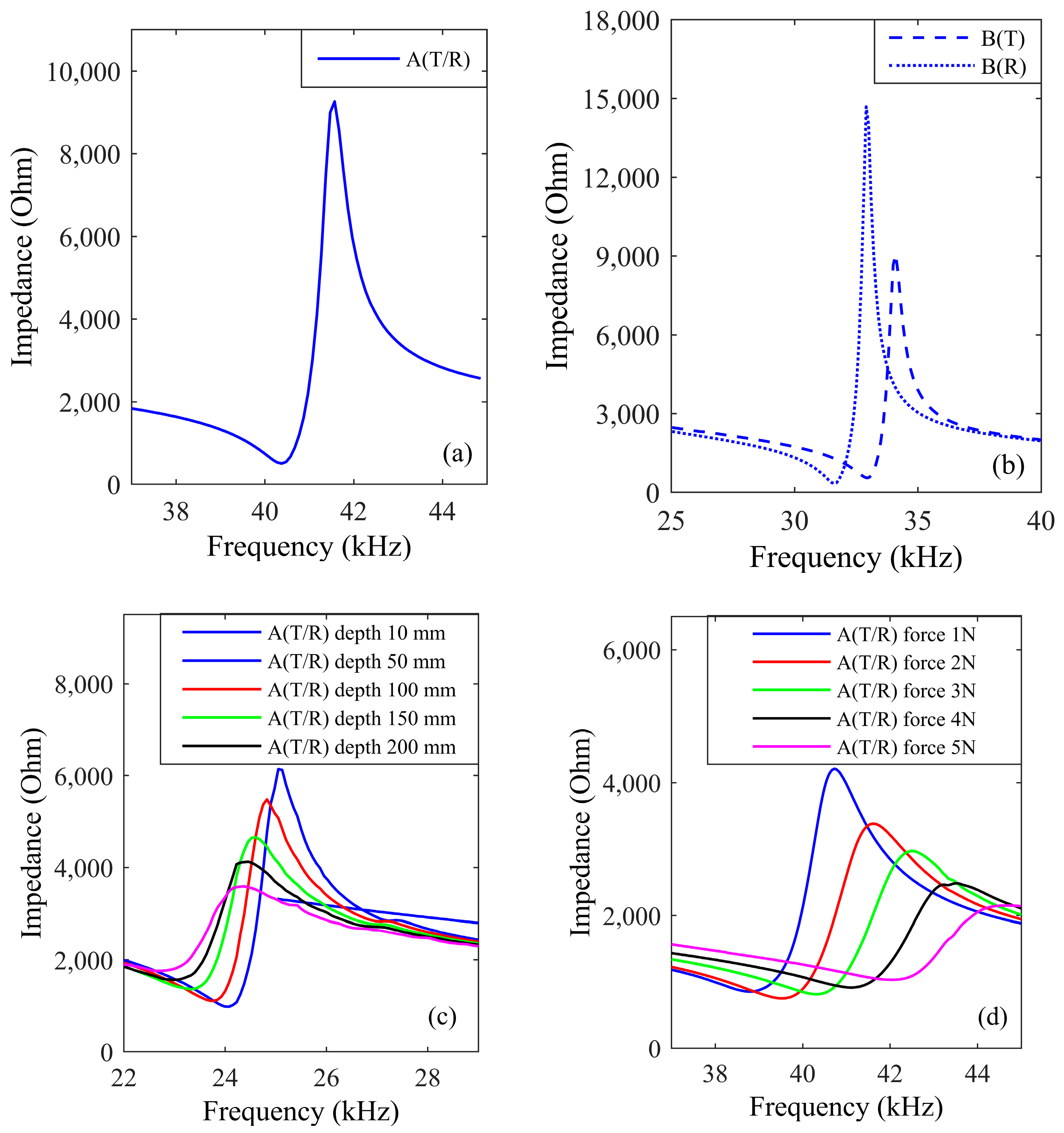
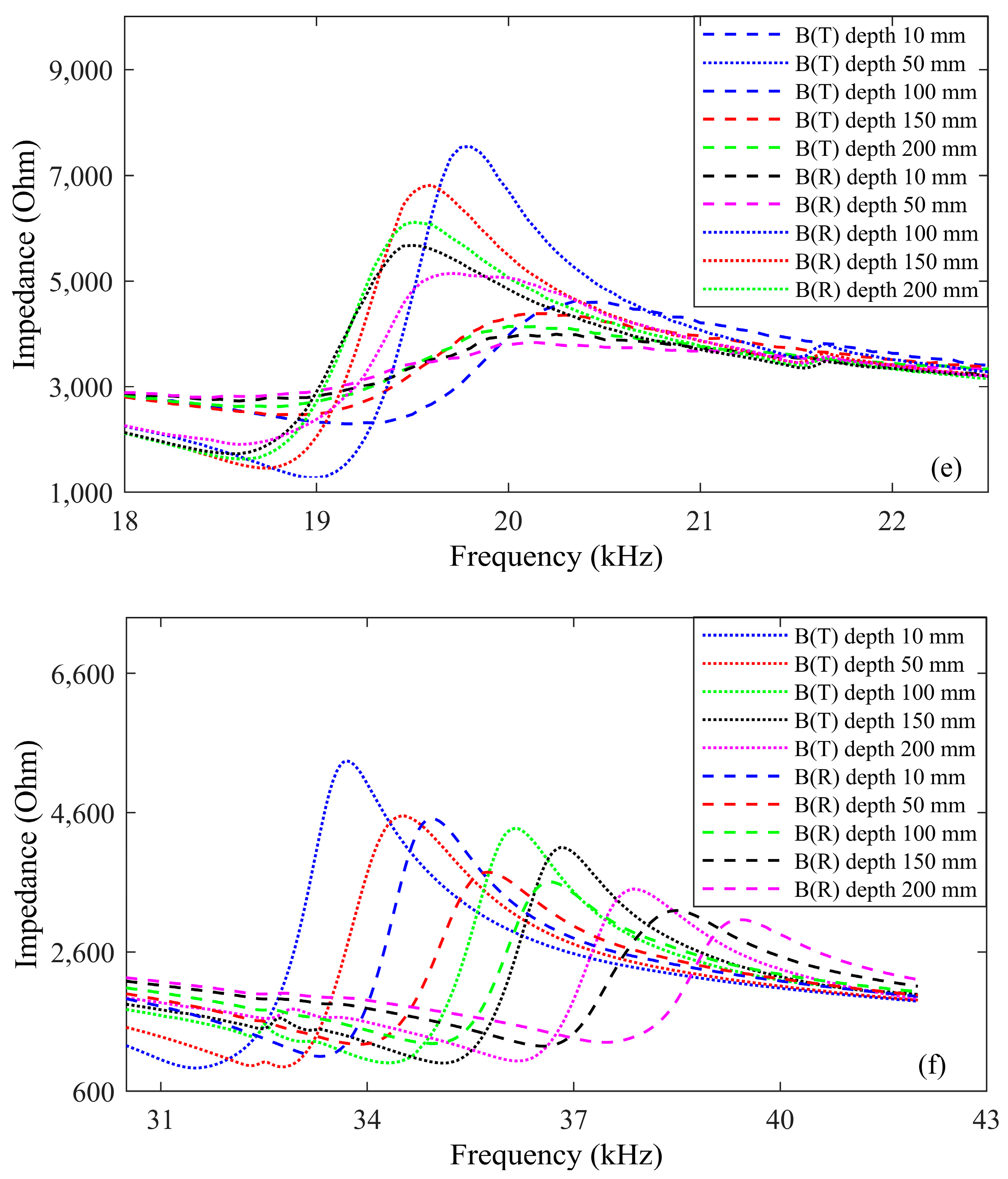
- Impedance variations across medium
- II.
- Loss calculation
- III.
- Medium losses and interference
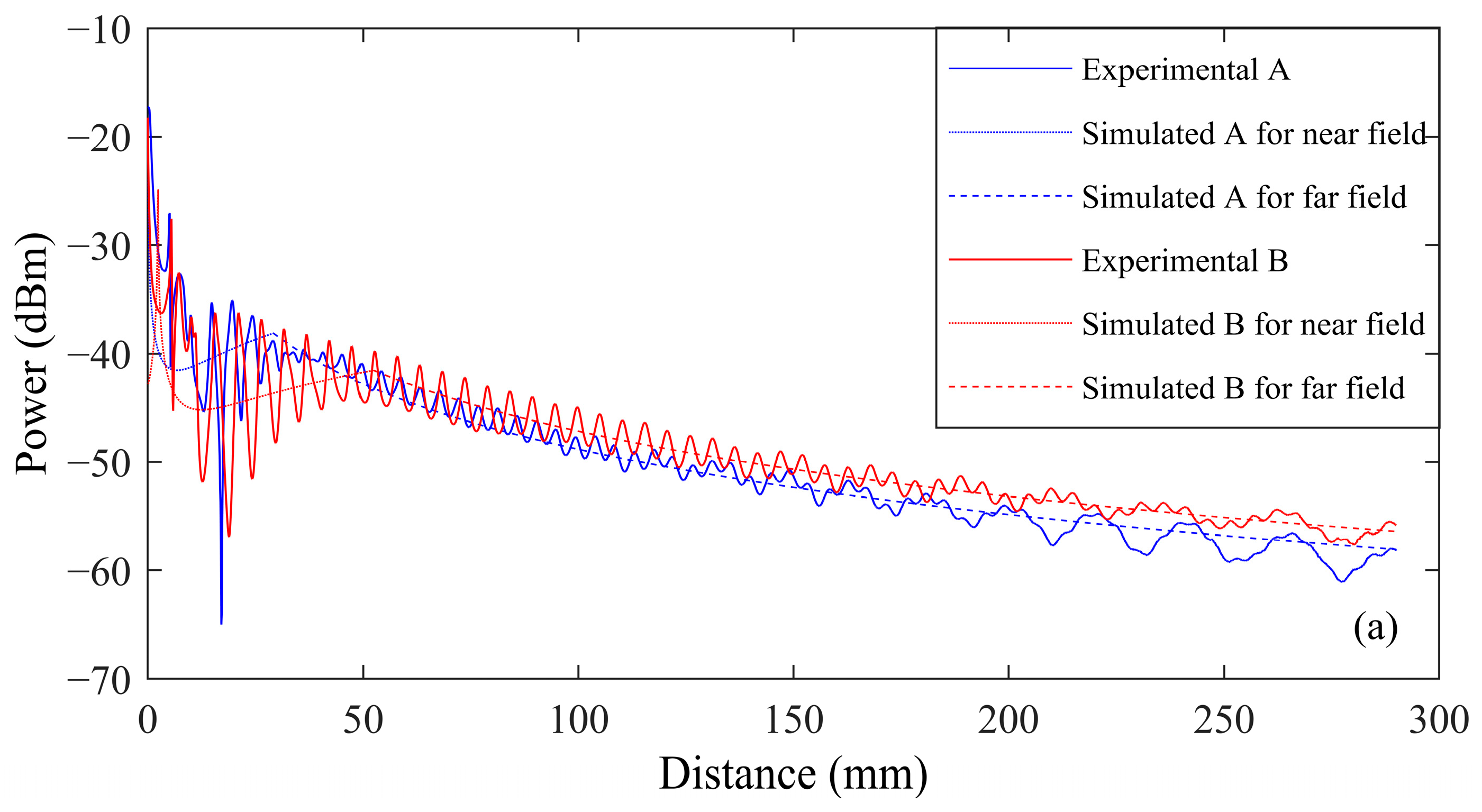
- In the air, reflections from the receiver’s surface generate interference at 1/4 wavelength intervals. The predicted values from the model align well with the experimental results. However, for transducer A, when the transmission distance is less than 29 mm, the transmission operates in the near field, resulting in a larger discrepancy between the predicted and measured values. At transmission distances exceeding 200 mm, the measured values fall below the predicted values, primarily due to the reduced energy received. Similarly, for transducer B, when the transmission distance is less than 47 mm, the near-field effect causes a significant error between the test and predicted values. For distances greater than 250 mm, the measured values are lower than the predicted values, again attributed to low received energy.
- In water, when the transmission distance is less than approximately 16 mm, the system operates in the near field. In water, the ultrasonic wavelength of transducer A is 61.8 mm, and that of transducer B is 82.4 mm. However, the test water tank is limited in size, measuring only 370 × 160 × 220 mm, resulting in significant energy reflections from the tank walls. These reflections lead to multiple wave interferences, causing irregular peaks and troughs. As the receiver approaches the water tank wall, the reflected energy increases, introducing significant errors in the test results, particularly when the transmission distance exceeds 200 mm. The discrepancies between the test and predicted values are primarily constrained by the limited size of the water tank, but the overall trend is in line with expectations.
- In aluminum alloys, the model employs a correction factor to correct errors resulting from metal surface roughness and air gaps. Moreover, due to the short transmission distance in the metal medium and the high energy levels at the receiver, the difference between the measured and predicted values is minimal.
- IV.
- Optimal energy transfer and loss mitigation
- Electrical losses can be minimized by designing an impedance-matching network or choosing components with appropriate impedance [32].
- Transducer losses can be reduced by utilizing high and wide-bandwidth transducers, as they can accommodate the resonant frequency drift caused by different application environments.
- Acoustic losses can be mitigated by positioning transducers at the peaks of interference patterns.
- Medium losses depend on the application environment, with high-frequency transducers offering better penetration but incurring higher losses.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Roy, S.; Azad, A.W.; Baidya, S.; Alam, M.K.; Khan, F. Powering solutions for biomedical sensors and implants inside the human body: A comprehensive review on energy harvesting units, energy storage, and wireless power transfer techniques. IEEE Trans. Power Electron. 2022, 37, 12237–12263. [Google Scholar] [CrossRef]
- Jiang, L.; Lu, G.; Yang, Y.; Zeng, Y.; Sun, Y.; Li, R.; Humayun, M.S.; Chen, Y.; Zhou, Q. Photoacoustic and piezo-ultrasound hybrid-induced energy transfer for 3D twining wireless multifunctional implants. Energy Environ. Sci. 2021, 14, 1490–1505. [Google Scholar] [CrossRef]
- Robinson, M. Implementing Frequency Optimization of Ultrasonic Energy Transfer through a Metal Barrier for Dynamic Load Conditions. Master’s Thesis, New Mexico Institute of Mining and Technology, Socorro, NM, USA, 2023. [Google Scholar]
- Ozeri, S.; Shmilovitz, D. Ultrasonic transcutaneous energy transfer for powering implanted devices. Ultrasonics 2010, 50, 556–566. [Google Scholar] [CrossRef] [PubMed]
- Jiang, L.; Yang, Y.; Chen, Y.; Zhou, Q. Ultrasound-induced wireless energy harvesting: From materials strategies to functional applications. Nano Energy 2020, 77, 105131. [Google Scholar] [CrossRef]
- Khan, S.R.; Pavuluri, S.K.; Cummins, G.; Desmulliez, M.P. Wireless power transfer techniques for implantable medical devices: A review. Sensors 2020, 20, 3487. [Google Scholar] [CrossRef]
- Chen, X.; Li, G.; Mu, X.; Xu, K. The design of impedance matching between long cable and ultrasonic transducer under seawater. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 4576–4581. [Google Scholar]
- Tseng, V.F.-G.; Bedair, S.S.; Lazarus, N. Acoustic power transfer and communication with a wireless sensor embedded within metal. IEEE Sens. J. 2018, 18, 5550–5558. [Google Scholar] [CrossRef]
- Sun, G.; Muneer, B.; Li, Y.; Zhu, Q. Ultracompact implantable design with integrated wireless power transfer and RF transmission capabilities. IEEE Trans. Biomed. Circuits Syst. 2018, 12, 281–291. [Google Scholar] [CrossRef]
- Lin, Z.; Duan, S.; Liu, M.; Dang, C.; Qian, S.; Zhang, L.; Wang, H.; Yan, W.; Zhu, M. Insights into materials, physics, and applications in flexible and wearable acoustic sensing technology. Adv. Mater. 2024, 36, 2306880. [Google Scholar] [CrossRef] [PubMed]
- Imani, I.M.; Kim, H.S.; Shin, J.; Lee, D.G.; Park, J.; Vaidya, A.; Kim, C.; Baik, J.M.; Zhang, Y.S.; Kang, H. Advanced Ultrasound Energy Transfer Technologies using Metamaterial Structures. Adv. Sci. 2024, 11, 2401494. [Google Scholar] [CrossRef]
- Galchev, T.V.; McCullagh, J.; Peterson, R.; Najafi, K. Harvesting traffic-induced vibrations for structural health monitoring of bridges. J. Micromech. Microeng. 2011, 21, 104005. [Google Scholar] [CrossRef]
- Zhang, K.; Gao, G.; Zhao, C.; Wang, Y.; Wang, Y.; Li, J. Review of the design of power ultrasonic generator for piezoelectric transducer. Ultrason. Sonochem. 2023, 96, 106438. [Google Scholar] [CrossRef] [PubMed]
- Mahmood, M.F.; Mohammed, S.L.; Gharghan, S.K. Ultrasound Sensor-Based Wireless Power Transfer for Low-Power Medical Devices. J. Low Power Electron. Appl. 2019, 9, 20. [Google Scholar] [CrossRef]
- Wilt, K.; Lawry, T.; Scarton, H.; Saulnier, G. One-dimensional pressure transfer models for acoustic–electric transmission channels. J. Sound Vib. 2015, 352, 158–173. [Google Scholar] [CrossRef]
- Du, Y.; Zhao, Y.; Wang, Z.; Wang, H.; Wang, J.; Geng, Y.; Sun, L. Two-dimensional equivalent circuit model of ultrasonic wireless power transmission. IEEE Trans. Ind. Electron. 2022, 70, 975–984. [Google Scholar] [CrossRef]
- Mendonça, L.S.; Minuzzi, E.V.; Cipriani, J.P.S.; Radecker, M.; Bisogno, F.E. State-Space Model of an Electro-Mechanical-Acoustic Contactless Energy Transfer System Based on Multiphysics Networks. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2021, 69, 241–253. [Google Scholar] [CrossRef] [PubMed]
- Jiao, J.; Qiao, Z.; Liu, B.; Yang, J.; Gao, X. Establishment and Application of a Semianalytical Model of Ultrasonic Power Transfer. IEEE/ASME Trans. Mechatron. 2024, 1–11. [Google Scholar] [CrossRef]
- Wu, M.; Chen, X.; Qi, C.; Mu, X. Considering losses to enhance circuit model accuracy of ultrasonic wireless power transfer system. IEEE Trans. Ind. Electron. 2019, 67, 8788–8798. [Google Scholar] [CrossRef]
- Draz, U.; Yasin, S.; Ali, T.; Ali, A.; Faheem, Z.B.; Zhang, N.; Jamal, M.H.; Suh, D.-Y. ROBINA: Rotational Orbit-Based Inter-Node Adjustment for Acoustic Routing Path in the Internet of Underwater Things (IoUTs). Sensors 2021, 21, 5968. [Google Scholar] [CrossRef]
- Rathod, V.T. A review of electric impedance matching techniques for piezoelectric sensors, actuators and transducers. Electronics 2019, 8, 169. [Google Scholar] [CrossRef]
- O’Donnell, M.; Busse, L.; Miller, J. 1. Piezoelectric transducers. In Methods in Experimental Physics; Elsevier: Amsterdam, The Netherlands, 1981; Volume 19, pp. 29–65. [Google Scholar]
- Park, Y.; Choi, M.; Uchino, K. Loss Determination Techniques for Piezoelectrics: A Review. Actuators 2023, 12, 213. [Google Scholar] [CrossRef]
- Zhang, Q.; Shi, S.; Chen, W. Research on effective electric-mechanical coupling coefficient of sandwich type piezoelectric ultrasonic transducer using bending vibration mode. Adv. Mech. Eng. 2015, 7, 204370. [Google Scholar] [CrossRef]
- Rathod, V.T. A review of acoustic impedance matching techniques for piezoelectric sensors and transducers. Sensors 2020, 20, 4051. [Google Scholar] [CrossRef] [PubMed]
- Arnau, A. Piezoelectric Transducers and Applications; Springer: Berlin/Heidelberg, Germany, 2004; Volume 2004. [Google Scholar]
- Bies, D.A.; Hansen, C.H. Engineering Noise Control: Theory and Practice; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Kinsler, L.E.; Frey, A.R.; Coppens, A.B.; Sanders, J.V. Fundamentals of Acoustics; John Wiley & Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Pierce, A.D.; Acoustics, A. Introduction to Its Physical Principles and Applications; Acoustical Society of America: New York, NY, USA; American Institute of Physics: College Park, MD, USA, 1981; pp. 235–276. [Google Scholar]
- Meyer, E. Physical and Applied Acoustics: An Introduction; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Gautam, G.P. Manipulation of Particles and Fluid Using Bulk Acoustic Waves in Microfluidics. Ph.D. Thesis, New Mexico Institute of Mining and Technology, Socorro, NM, USA, 2019. [Google Scholar]
- Yang, X.; Zhang, Z.; Xu, M.; Li, S.; Zhang, Y.; Zhu, X.-F.; Ouyang, X.; Alù, A. Digital non-Foster-inspired electronics for broadband impedance matching. Nat. Commun. 2024, 15, 4346. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Parameters | Unit | Value |
|---|---|---|---|
| Air | density | kg/m3 | 1 |
| sound velocity | m/s | 343 | |
| acoustic impedance | 106 × kg/m2 s | 0.0034 | |
| Water | density | kg/m3 | 997 |
| sound velocity | m/s | 1497 | |
| acoustic impedance | 106 × kg/m2 s | 1.49 | |
| Aluminum | density | kg/m3 | 2700 |
| sound velocity | m/s | 6420 | |
| acoustic impedance | 106 × kg/m2 s | 17.33 | |
| Transducer A | frequency | kHz | 40 |
| diameter | mm | 18 | |
| acoustic impedance | 106 × kg/m2 s | 30.8 | |
| Transducer B | frequency | kHz | 33 |
| diameter | mm | 25 | |
| acoustic impedance | 106 × kg/m2 s | 30.8 |
| Loss (dB) | Transducer | Air | Water (Depth = 150 mm) | Aluminum (Force = 5 N) |
|---|---|---|---|---|
| Electrical Loss | B (T) | 5.19 | 11.49 | 5.65 |
| B (R) | 15.54 | 10.27 | 18.86 | |
| A (T/R) | 4.88 | 9.21 | 4.37 | |
| Transducer Loss | B (T) | 10.33 | 6.20 | 11.37 |
| B (R) | 9.79 | 7.89 | 10.13 | |
| A (T/R) | 11.25 | 8.10 | 10.22 | |
| Acoustic loss | B (T) | 33.55 | 5.35 | 0.35 |
| B (R) | 33.55 | 5.35 | 0.35 | |
| A (T/R) | 33.55 | 5.35 | 0.35 |
| Medium | Transducer | Average Error |
|---|---|---|
| Air | A | 2.54% |
| B | 3.11% | |
| Water | A | 27.37% |
| B | 19.68% | |
| Aluminum | A | 1.12% |
| B | 1.76% |
| Work | Medium | Distance | Frequency | Error |
|---|---|---|---|---|
| [15] | Stainless steel | 74.8 mm | 4 MHz | - |
| [16] | Alumina ceramic | 50 mm | 97–300 kHz | 1.59–3.64%, |
| [17] | Aluminum | 100 mm, 200 mm | 738 kHz 1040 kHz | 10.2–10.6%, 5.0–7.6% |
| Steel | 100 mm, 200 mm | 738 kHz | 6.1–6.9% | |
| [18] | Aluminum | 1.5 mm | 0.353–1.96 MHz | 1.14–2.67% |
| [19] | Aluminum | 50 mm | 656–978 kHz | 21% |
| Present work | Air Water Aluminum | 0–290 mm 0–290 mm 0–35 mm | 19–42 kHz | 2.54–3.11% 19.68–27.37% 1.12–1.76% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Y.; Jiang, Y.; Li, C. A Universal Model for Ultrasonic Energy Transmission in Various Media. Sensors 2024, 24, 6230. https://doi.org/10.3390/s24196230
Ma Y, Jiang Y, Li C. A Universal Model for Ultrasonic Energy Transmission in Various Media. Sensors. 2024; 24(19):6230. https://doi.org/10.3390/s24196230
Chicago/Turabian StyleMa, Yufei, Yunan Jiang, and Chong Li. 2024. "A Universal Model for Ultrasonic Energy Transmission in Various Media" Sensors 24, no. 19: 6230. https://doi.org/10.3390/s24196230