
Handrim Reaction Force and Moment Assessment Using a Minimal IMU Configuration and Non-Linear Modeling Approach during Manual Wheelchair Propulsion


Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Set-Up
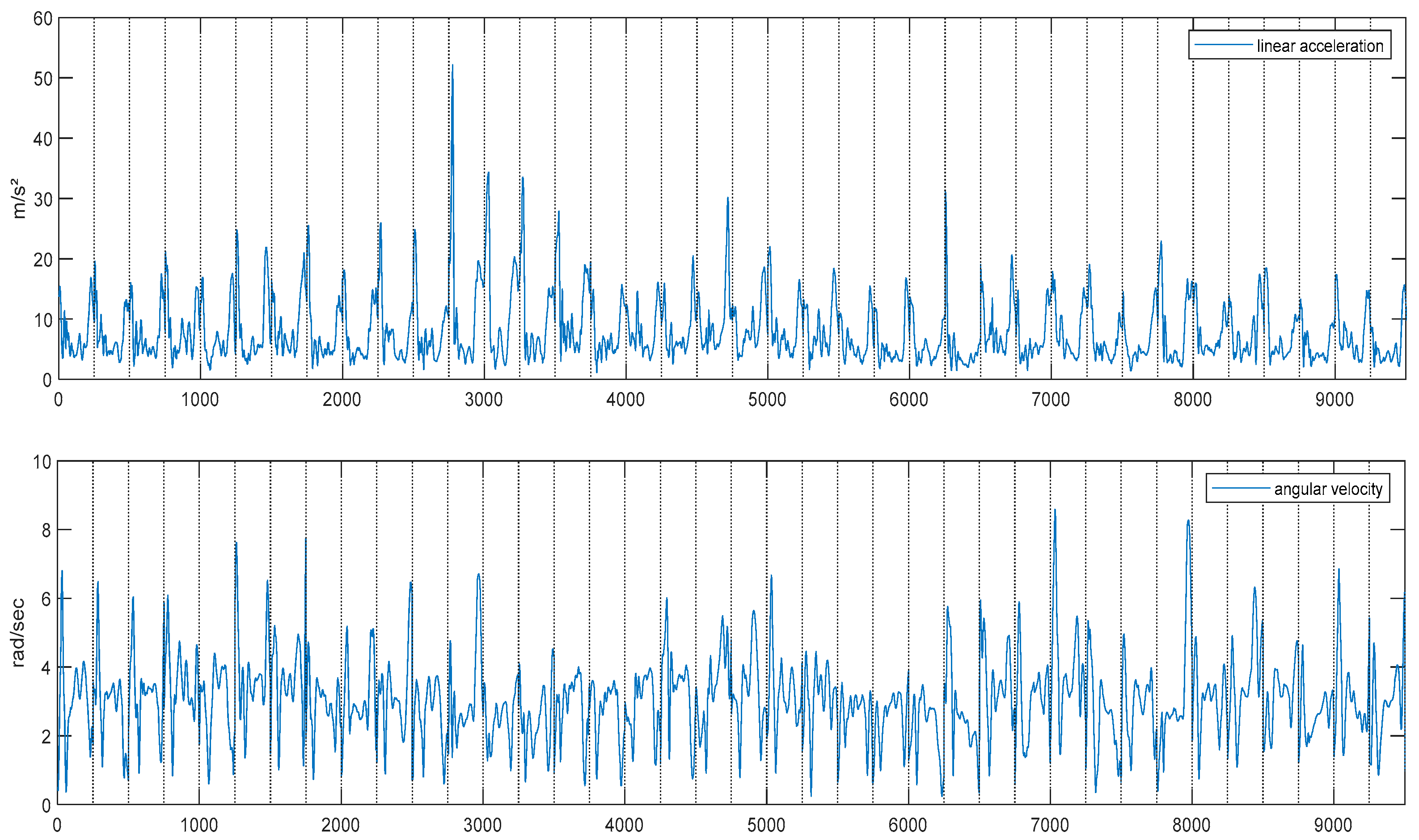
2.2. Data Processing
2.3. Non-Linear Hammerstein–Wiener Modeling Approach
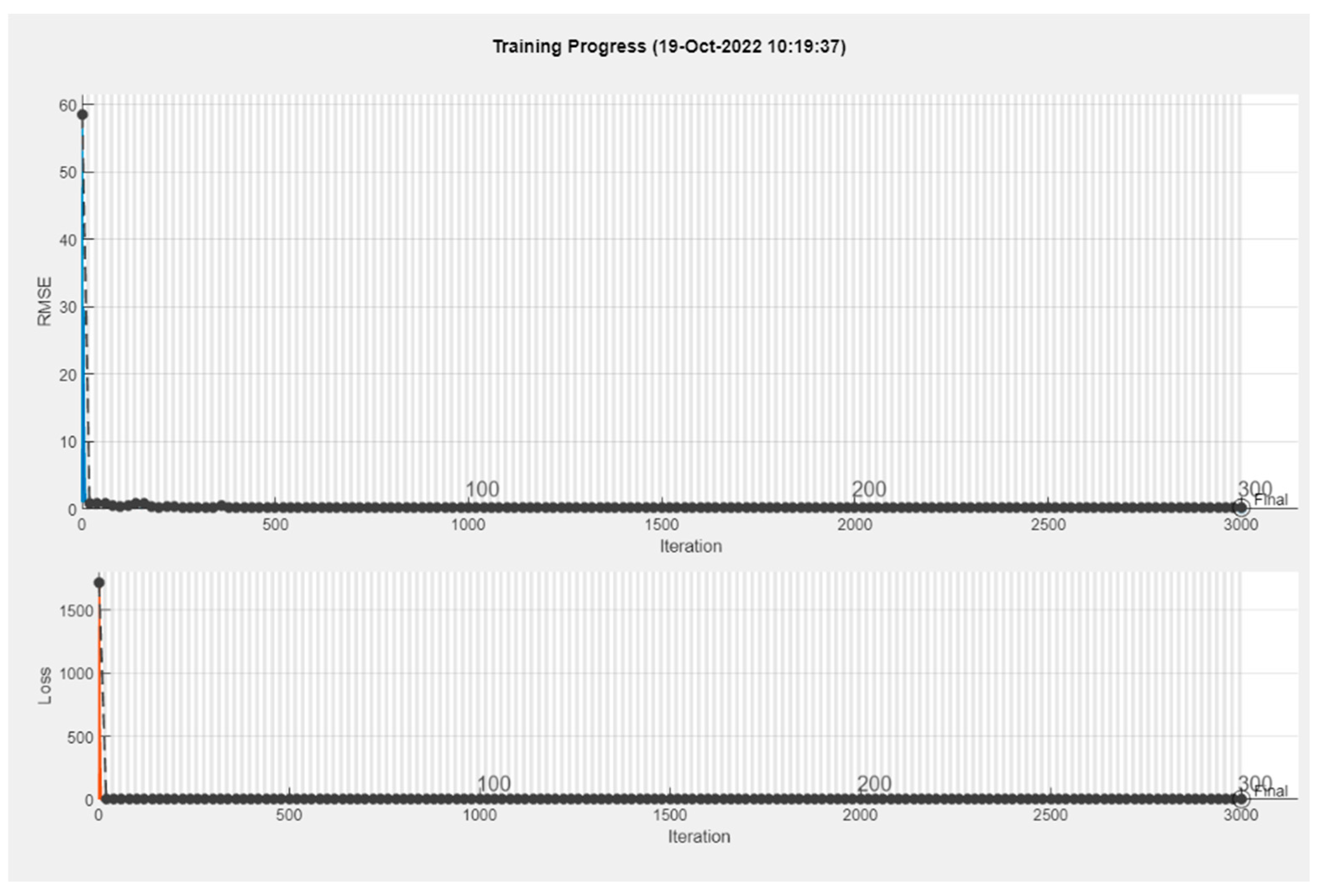
2.4. Neural Network Long-Short Term Memory (LSTM) Approach
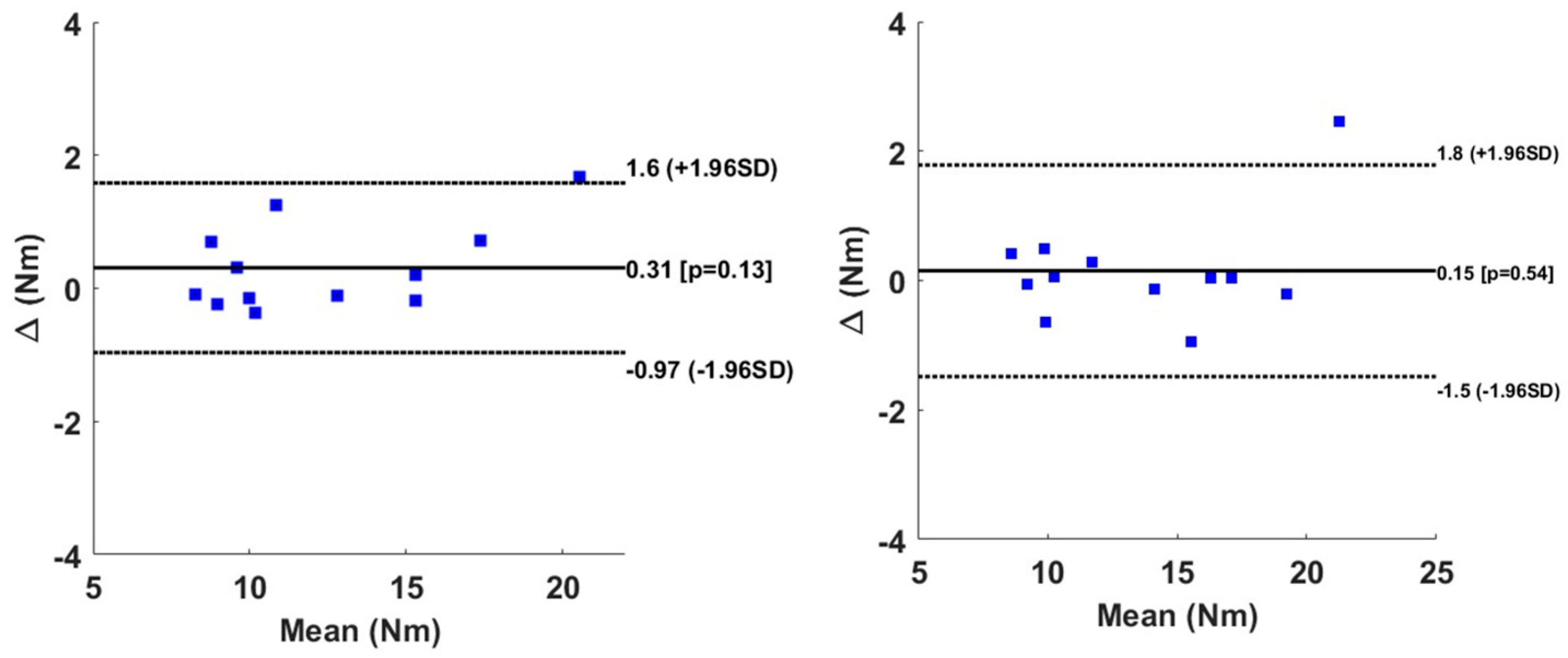
2.5. Statistical Analysis
3. Results
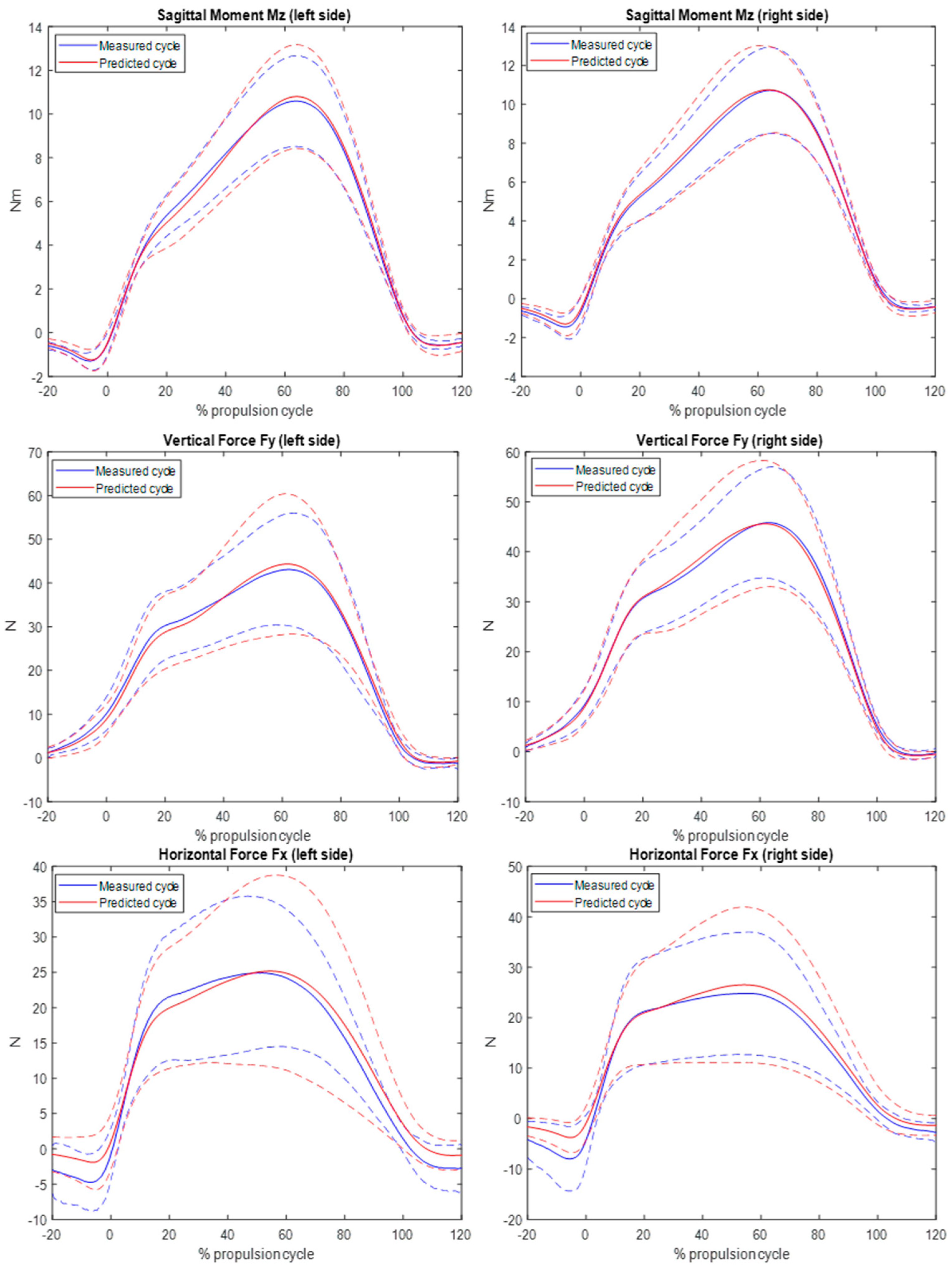
3.1. Non-Linear Hammerstein–Wiener Modeling Approach
3.2. Recurrent Neural Network: Bi-Long Short-Term Memory (BiLSTM) Approach
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Eriks-Hoogland, I.E.; Hoekstra, T.; de Groot, S.; Stucki, G.; Post, M.W.; van der Woude, L.H. Trajectories of musculoskeletal shoulder pain after spinal cord injury: Identification and predictors. J. Spinal. Cord. Med. 2014, 37, 288–298. [Google Scholar] [CrossRef] [PubMed]
- Veeger, H.E.; Rozendaal, L.A.; van der Helm, F.C. Load on the shoulder in low intensity wheelchair propulsion. Clin. Biomech. 2002, 17, 211–218. [Google Scholar] [CrossRef] [PubMed]
- van Drongelen, S.; van der Woude, L.H.V.; Veeger, H.E.J. Load on the shoulder complex during wheelchair propulsion and weight relief lifting. Clin. Biomech. 2011, 26, 452–457. [Google Scholar] [CrossRef] [PubMed]
- Mercer, J.L.; Boninger, M.L.; Koontz, A.; Ren, D.; Dyson-Hudson, T.; Cooper, R.A. Shoulder joint kinetics and pathology in manual wheelchair users. Clin. Biomech. 2006, 21, 781–789. [Google Scholar] [CrossRef]
- Cooper, R.A.; Boninger, M.L.; Shimada, S.D.; Lawrence, B.M. Glenohumeral joint kinematics and kinetics for three coordinate system representations during wheelchair propulsion. Amer. J. Phys. Med. Rehab. 1999, 78, 435–446. [Google Scholar] [CrossRef]
- Aissaoui, R.; Gagnon, D. Effect of Haptic Training During Manual Wheelchair Propulsion on Shoulder Joint Reaction Moments. Front. Rehabilit. Sci. 2022, 3, 827534. [Google Scholar] [CrossRef]
- Westerhoff, P.; Graichen, F.; Bender, A.; Halder, A.; Beier, A.; Rohlmann, A.; Bergmann, G. Measurement of shoulder joint loads during wheelchair propulsion measured in vivo. Clin. Biomech. 2011, 26, 982–989. [Google Scholar] [CrossRef]
- Ancillao, A.; Tedesco, S.; Barton, J.; O’Flynn, B. Indirect measurement of ground reaction forces and moments by means of wearable inertial sensors: A systematic review. Sensors 2018, 18, 2564. [Google Scholar] [CrossRef]
- Ren, L.; Jones, R.K.; Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J. Biomech. 2008, 41, 2750–2759. [Google Scholar] [CrossRef]
- Tanghe, K.; Afschrift, M.; Jonkers, I.; De Groote, F.; De Schutter, J.; Aertbeliën, E. A probabilistic method to estimate gait kinetics in the absence of ground reaction force measurements. J. Biomech. 2019, 96, 109327. [Google Scholar] [CrossRef]
- Mullera, A.; Pontonnier, C.; Robert-Lachaine, X.; Dumont, G.; Plamondon, A. Motion-based prediction of external forces and moments and back loading during manual material handling tasks. Appl. Ergon. 2020, 82, 102935. [Google Scholar] [CrossRef] [PubMed]
- Neugebauer, J.M.; Collins, K.H.; Hawkins, D.A. Ground Reaction Force Estimates from ActiGraph GT3X+ Hip Accelerations. PLoS ONE 2014, 9, e99023. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Kang, H.; Lee, S.; Choi, J.; Tack, G. A Deep Learning Model for 3D Ground Reaction Force Estimation Using Shoes with Three Uniaxial Load Cells. Sensors 2023, 23, 3428. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.J.; Lin, P.C.; Guo, L.Y.; Su, F.C. Prediction of applied forces in handrim wheelchair propulsion. J. Biomech. 2011, 44, 455–460. [Google Scholar] [CrossRef] [PubMed]
- Chenier, F.; Aissaoui, R. Predicting the sequence of mean propulsion forces during indoor wheelchair sports: A proof of concept. In Proceedings of the 35th Conference of the International Society of Biomechanics in Sports, Cologne, Germany, 14–18 June 2017; pp. 694–697. [Google Scholar]
- Hernandez, V.; Rezzoug, N.; Gorce, P.; Venture, G. Wheelchair propulsion: Force orientation and amplitude prediction with recurrent neural network. J. Biomech. 2018, 78, 166–171. [Google Scholar] [CrossRef] [PubMed]
- Pham, T.-H.; Caron, S.; Kheddar, A. Multicontact interaction force sensing from whole-body motion capture. IEEE Trans. Indust. Inform. 2018, 14, 2343–2352. [Google Scholar] [CrossRef]
- Siami-Namini, S.; Tavakoli, N.; Siami Namin, A. The Performance of LSTM and BiLSTM in Forecasting Time Series. In Proceedings of the IEEE International Conference on Big Data (Big Data), Los Angeles, CA, USA, 9–12 December 2019; pp. 3285–3292. [Google Scholar]
- Zhu, Y. Estimation of an N–L–N Hammerstein–Wiener model. Automatica 2002, 38, 1607–1614. [Google Scholar] [CrossRef]
- Shaikh, A.-H.; Barbé, K. Wiener–Hammerstein System Identification: A Fast Approach Through Spearman Correlation. IEEE Trans. Instrum. Meas. 2019, 68, 1628–1636. [Google Scholar] [CrossRef]
- Schoukens, M.; Tiels, K. Identification of block-oriented nonlinear systems starting from linear approximations: A survey. Automatica 2017, 85, 272–292. [Google Scholar] [CrossRef]
- de Vries, W.H.K.; Amrein, S.; Arnet, U.; Mayrhuber, L.; Ehrmann, C.; Veeger, H.E.J. Classification of Wheelchair Related Shoulder Loading Activities from Wearable Sensor Data: A Machine Learning Approach. Sensors 2002, 19, 7404. [Google Scholar] [CrossRef]
- Liu, D.; Jeong, H.; Wei, A.; Kapila, V. Bidirectional LSTM-based Network for Fall Prediction in a Humanoid. In Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Abu Dhabi, United Arab Emirates, 4–6 November 2020; pp. 129–135. [Google Scholar] [CrossRef]
- Bland, J.M.; Altman, D.G. Statistical methods for assessing agreement between two methods of clinical measurement. Lancet 1986, 327, 307–310. [Google Scholar] [CrossRef]
- Gagnon, D.H.; Jouval, C.; Chénier, F. Estimating pushrim temporal and kinetic measures using an instrumented treadmill during wheelchair propulsion: A concurrent validity study. J. Biomech. 2016, 49, 1976–1982. [Google Scholar] [CrossRef] [PubMed]
- Consortium for Spinal Cord Medicine. Preservation of upper limb function following spinal cord injury: A clinical practice guideline for health-care professionals. J. Spinal. Cord. Med. 2005, 28, 434–470. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject | Variable | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Fx (N) | Fy (N) | Mz (N.m) | ||||||||||
| RMSE | MAE | RMSE | MAE | RMSE | MAE | |||||||
| Right | Left | Right | Left | Right | Left | Right | Left | Right | Left | Right | Left | |
| 1 | 4.5 | 4.7 | 3.5 | 3.8 | 9.5 | 6.8 | 7.5 | 5.5 | 1.2 | 0.8 | 0.9 | 0.7 |
| 2 | 5.0 | 3.7 | 4.3 | 2.8 | 8.9 | 8.6 | 6.9 | 6.7 | 1.1 | 0.8 | 0.8 | 0.6 |
| 3 | 4.4 | 3.8 | 3.2 | 2.9 | 7.4 | 10.4 | 5.8 | 8.1 | 1.1 | 1.0 | 0.8 | 0.8 |
| 4 | 5.0 | 4.1 | 4.1 | 3.0 | 9.6 | 7.7 | 7.8 | 6.2 | 0.8 | 1.1 | 0.6 | 0.9 |
| 5 | 7.4 | 6.9 | 5.7 | 5.3 | 9.5 | 11.3 | 7.2 | 9.1 | 1.6 | 1.4 | 1.4 | 1.1 |
| 6 | 4.7 | 6.1 | 3.8 | 5.0 | 10.5 | 11.9 | 8.5 | 8.8 | 1.6 | 1.4 | 1.3 | 1.2 |
| 7 | 3.7 | 6.3 | 3.0 | 1.3 | 5.6 | 7.9 | 4.5 | 6.1 | 0.9 | 1,6 | 0.7 | 1.3 |
| 8 | 6.7 | 4.3 | 5.3 | 3.3 | 7.2 | 6.6 | 5.8 | 5.4 | 1.3 | 1.3 | 1.0 | 1.1 |
| 9 | 6.1 | 7.0 | 5.0 | 5.4 | 10.7 | 13.8 | 8.6 | 10.7 | 2.2 | 2.7 | 1.8 | 2.2 |
| 10 | 7.9 | 6.5 | 5.9 | 5.2 | 15.7 | 13.7 | 12.7 | 10.9 | 1.7 | 1.8 | 1.4 | 1.5 |
| 11 | 5.8 | 9.7 | 4.6 | 8.3 | 9.4 | 8.1 | 7.7 | 6.5 | 1.3 | 1.2 | 1.0 | 0.9 |
| Mean | 5.6 | 5.7 | 4.4 | 4.2 | 9.4 | 9.7 | 7.5 | 7.6 | 1.3 | 1.3 | 1.0 | 1.1 |
| Subject | Variable | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Fx (N) | Fy (N) | Mz (N.m) | ||||||||||
| RMSE | MAE | RMSE | MAE | RMSE | MAE | |||||||
| Right | Left | Right | Left | Right | Left | Right | Left | Right | Left | Right | Left | |
| 1 | 4.4 | 6.1 | 3.6 | 5.1 | 7 | 5.8 | 5.6 | 4.6 | 1.2 | 1 | 0.9 | 0.8 |
| 2 | 6 | 4.5 | 5 | 3.8 | 6 | 6.4 | 4.6 | 4.9 | 0.9 | 0.9 | 0.7 | 0.7 |
| 3 | 8.9 | 3.7 | 7.3 | 3 | 5.6 | 7.1 | 4.2 | 5.3 | 0.9 | 1 | 0.7 | 0.8 |
| 4 | 5.6 | 5.3 | 4.8 | 4.2 | 9.6 | 7.7 | 7.6 | 5.9 | 0.9 | 1 | 0.7 | 0.8 |
| 5 | 12.3 | 12.7 | 9.7 | 10.9 | 7.1 | 7.2 | 5.4 | 5.7 | 1.6 | 1.5 | 1.2 | 1.2 |
| 6 | 7.2 | 10.3 | 5.9 | 8.7 | 6.9 | 9.2 | 5.5 | 7.4 | 1.5 | 1.5 | 1.2 | 1.2 |
| 7 | 7.3 | 6.6 | 6 | 5.5 | 8.2 | 9.1 | 6.4 | 7.2 | 1.3 | 1.5 | 1.1 | 1.1 |
| 8 | 4.8 | 5.5 | 3.9 | 4.6 | 5.1 | 5.4 | 4.1 | 4.3 | 0.9 | 0.9 | 0.7 | 0.7 |
| 9 | 14 | 5.7 | 11.2 | 4.6 | 10.1 | 10.9 | 8 | 8.8 | 1.4 | 1.5 | 1.1 | 1.2 |
| 10 | 5.6 | 9.1 | 4.7 | 7.7 | 7.8 | 6.5 | 6.2 | 5.2 | 1.3 | 1.4 | 1 | 1.1 |
| 11 | 5.9 | 11.4 | 4.6 | 9.2 | 8.8 | 8.2 | 6.7 | 6.4 | 1.4 | 1.3 | 1.1 | 1.1 |
| Mean | 7.4 | 7.3 | 6.1 | 6.1 | 7.5 | 7.6 | 5.8 | 5.9 | 1.2 | 1.2 | 0.99 | 0.99 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aissaoui, R.; De Lutiis, A.; Feghoul, A.; Chénier, F. Handrim Reaction Force and Moment Assessment Using a Minimal IMU Configuration and Non-Linear Modeling Approach during Manual Wheelchair Propulsion. Sensors 2024, 24, 6307. https://doi.org/10.3390/s24196307
Aissaoui R, De Lutiis A, Feghoul A, Chénier F. Handrim Reaction Force and Moment Assessment Using a Minimal IMU Configuration and Non-Linear Modeling Approach during Manual Wheelchair Propulsion. Sensors. 2024; 24(19):6307. https://doi.org/10.3390/s24196307
Chicago/Turabian StyleAissaoui, Rachid, Amaury De Lutiis, Aiman Feghoul, and Félix Chénier. 2024. "Handrim Reaction Force and Moment Assessment Using a Minimal IMU Configuration and Non-Linear Modeling Approach during Manual Wheelchair Propulsion" Sensors 24, no. 19: 6307. https://doi.org/10.3390/s24196307