1. Introduction
Wireless Sensor Networks (WSNs) have been considered as a key technology for a wide range of application domains that cannot be resolved with traditional wireless
ad hoc networks [
1,
2,
3]. WSNs are expected to be versatile in many situations [
4], but no standards and design rules have been followed in designing sensor network architectures because every sensor application has its own unique purpose and requires various sensor hardware and network capability. For this reason, traditional WSN research projects tend to design their sensor applications depending on specific sensor hardware, network routing schemes, and operating systems. However, this monolithic and all-in-one approach forces a sensor application to be tightly coupled to a proprietary sensor network architecture and it results in several technical weaknesses; interoperability, extensibility, difficulty of development, and reusability of sensing data [
5].
As an alternative method to resolve the issue, the protocol bridge research seamlessly integrating WSNs with the TCP/IP network has attracted researchers' attention [
6,
7] including the IETF [
8]. The main purpose of this research is to provide Internet users with a unified interface to transparently access sensor networks using the TCP/IP protocol. It is often argued whether the TCP/IP protocol stack and the node-centric communication are suitable for WSNs or not. However, if WSNs support the TCP/IP protocol, existing TCP/IP network applications can use heterogeneous WSNs as ordinary network participants and this seamless integration can be used on diverse applications such as a smart space or Next Generation Network (NGN).
In spite of promising advantages of the protocol bridge research, existing studies still have several issues that should be deeply discussed. Most of all, those studies give no consideration to the reusability of sensing data. Their main purpose is to ensure the end-to-end communication between sensors and external sensor applications. It means every session through a bridge is independent, regardless of the similarity of sensing data. Usually, in WSNs, a data reporting model can be categorized into four models: periodical, event-driven, query-driven, and hybrid [
9]. If a single external sensor application uses a WSN, each model may show its own pros and cons. However, when multiple sensor applications share a WSN simultaneously, things begin to take on a new aspect. In this circumstance, a WSN using a periodical or an event-driven model has to repeatedly report the same data to multiple external applications. Even with a query-driven model, the same sensing data may be requested by multiple sensor applications and the data will be repeatedly transmitted as well. In WSNs, the transmission energy is much larger than the computational energy, so reducing the number of transmissions on WSNs is always an important design factor [
3,
5], but the protocol bridge research has not seriously discussed the reusability of sensing data yet.
Another consideration is that the current studies do not provide the data-centric communication method. As indicated in [
10], the data-centric method is very suitable for the characteristics of sensor networks. The data-centric method does not collect sensing data directly from each sensor's raw data but allocates abstract sensing tasks to the whole sensor network. This kind of communication method enables sensor applications to consider the entire sensor network as an abstract data infrastructure. Although the node-centric method is undoubtedly a basic method for WSNs, some sensor applications may need to access sensing data via the data-centric method.
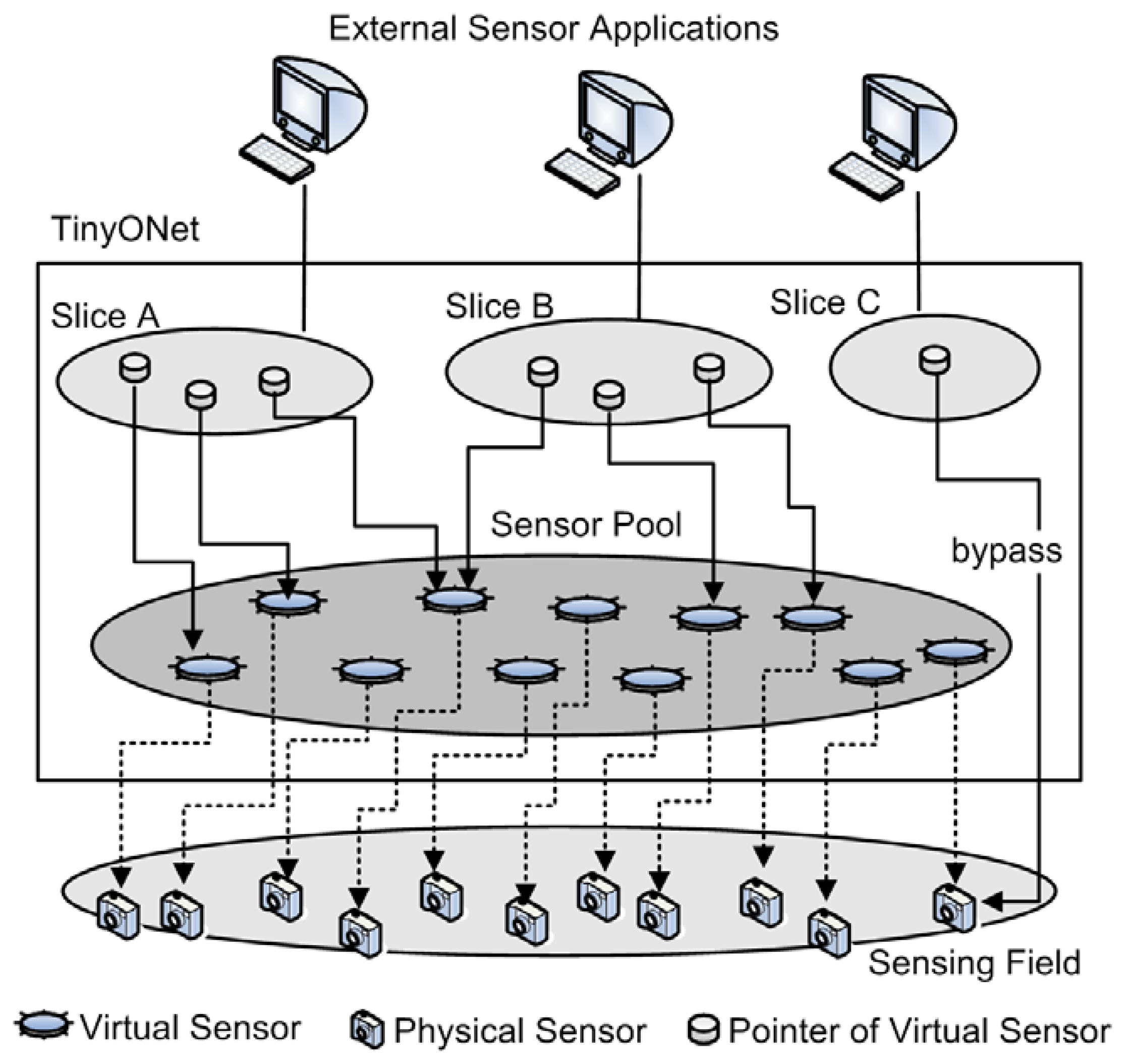
To overcome the shortcomings of existing research, we proposed a new bridge system, TinyONet, in which virtual sensors cache sensing data and gather into functional entities that provide multiple sensor applications with both the data-centric and the node-centric communications. Most WSNs use a sink node as a portal to communicate with physical sensors on a sensing field. All data between sensors and external sensor applications must pass through the sink node. Moreover, the sink node is quite free for the limitation of computational and energy resources comparing to ordinary sensors. We paid attention to this feature and we anticipated that a proper caching scheme on the sink node could improve the reusability of sensing data and provide a sophisticated data access. For the node-centric communication, TinyONet prepares a bypass method with which sensor applications can detour TinyONet and directly communicate to physical sensors. We implemented TinyONet on an embedded Linux machine and made it cooperate with TinyOS-based sensors. If a new kind of data access service is needed, the service can be dynamically injected into a running sink node without disturbing other parts of the system.
The remainder of this paper is divided into five sections. Section 2 briefly analyzes the pros and cons of existing research and considers design principles. Section 3 describes a conceptual design, overall architecture, and basic ideas of TinyONet. Section 4 shows the implementation and operations of TinyONet. In Section 5, we evaluate TinyONet with the considered design principles and analyze the performance results. Finally, Section 6 concludes the paper.
4. Implementation and Operations
4.1. Prototype Implementation
The designed components can be implemented with contemporary Object-Oriented languages such as Java or C++. Although Java is safer and more convenient than C++ in most respects, C++ codes can be run on more platforms than Java because some platforms do not have their own Java Virtual Machine (JVM). Since we wanted for TinyONet to be ported on a wide range of platforms including resource-restricted embedded machine, C++ is selected as the implementation language. We also anticipated that C++ code can be easily converted into Java with a little effort.
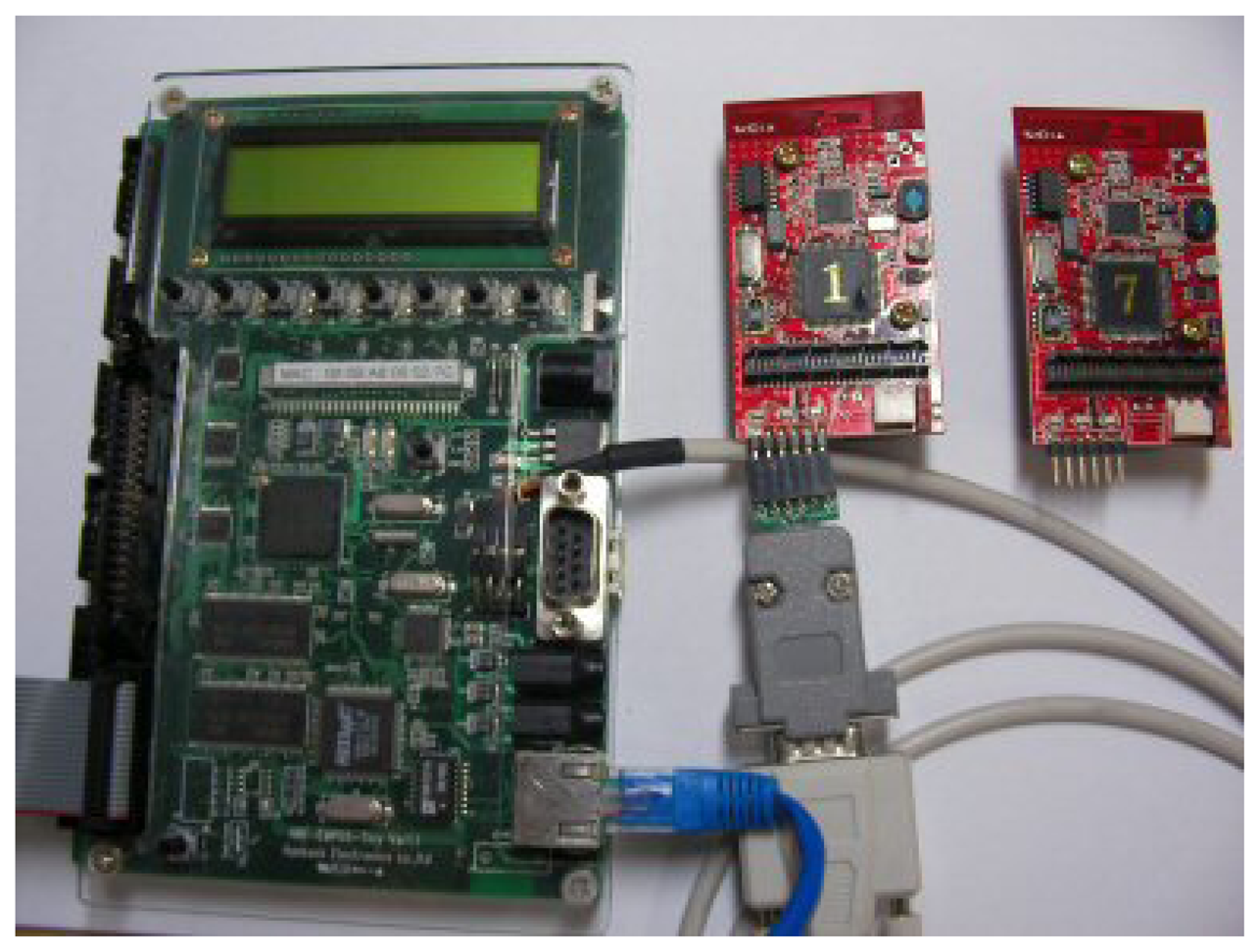
We implemented TinyONet on a commercial embedded Linux machine named EMPOS-Tiny [
21], which consisted of Intel XScale PXA-255 CPU, 32 Mbyte Flash memory and 64 Mbyte RAM. A target mote is a commercial product, ZigbeX [
22], based on ATMega-128 CPU that has 128 Kbyte code area, 4 Kbyte EEPROM and 2 Kbyte SDRAM. The mote runs TinyOS and uses ZigBee as RF communication. Each mote can sense temperature, humidity and intensity of illumination. All motes install the
TxRx module for their communications. The hardware configuration is shown in
Figure 3.
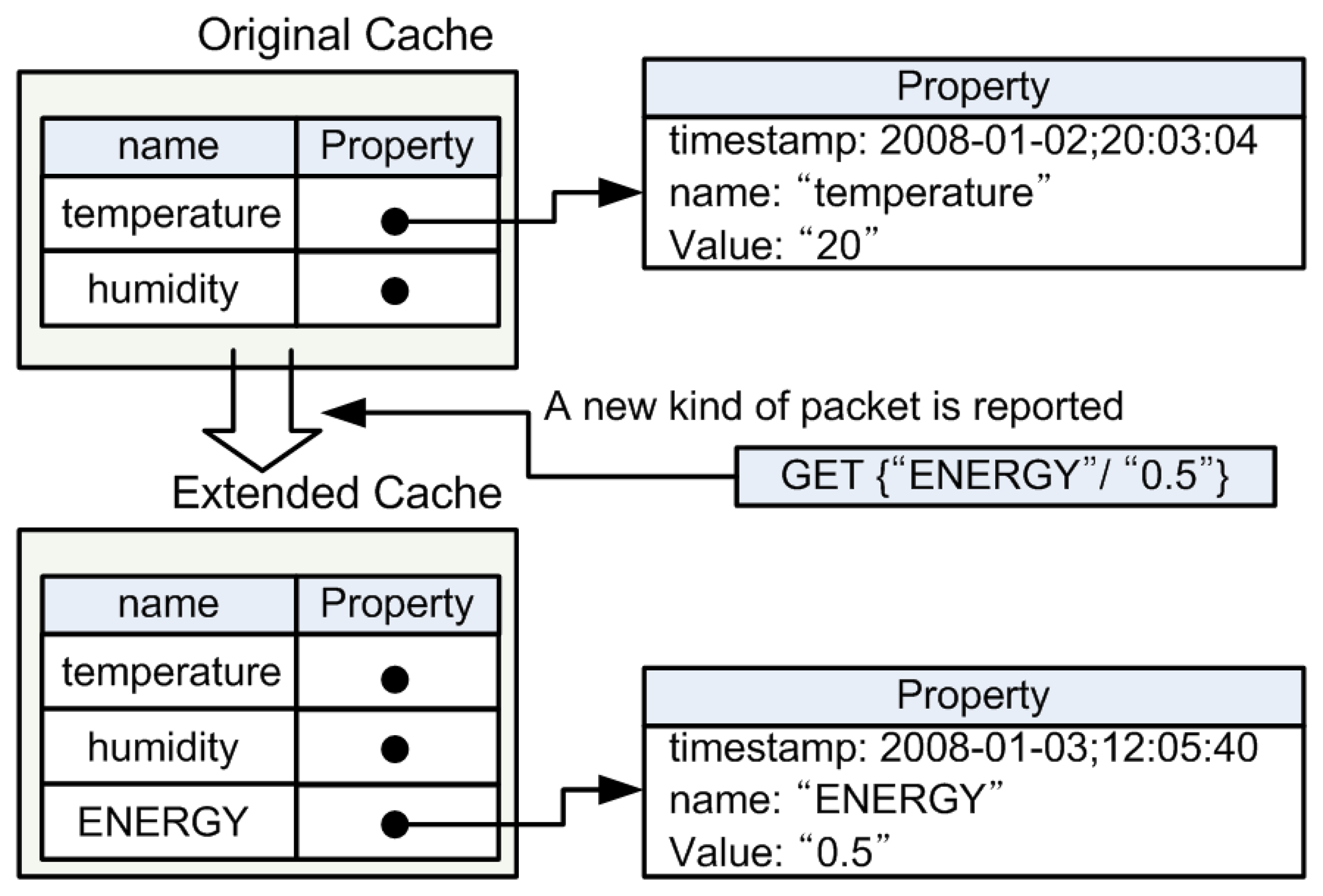
4.2. Maintaining Sensing Data of Virtual Sensor
Each
VirtualSensor has a Map-based cache where the key is a property name and the value is the instance of a
Property class. The
Property class has a timestamp, a property name and value. If a physical sensor has a sensing ability of temperature and humidity, the corresponding virtual sensor will have two instances of the
Property class as shown in the upper part of
Figure 4.
As shown in the lower part of
Figure 4,
VirtualSensor's cache can be dynamically extended when a reported data packet contains new kinds of properties even after deployment. For example, if a physical sensor which reports residual energy is newly spread on the existing sensing field, this sensor may report its residual energy periodically. After receiving the first report packet, the corresponding
VirtualSensor will add a new property holding ‘residual energy’ which other existing
VirtualSensors' caches do not have. With this approach,
VirtualSensor can dynamically adopt a new kind of property without the system modification or the system halt. This paper is limited in that the cache entry deletion was not implemented. We did not include cache entry deletion for two reasons. First, we anticipated that a physical sensor rarely removes the existing properties provided by its hardware after deployment. Second, we concluded that the aging of cache entries could be enough to complement the cache entry deletion. However, the function of the cache entry deletion may be needed for general purpose, therefore it would be added in the future study.
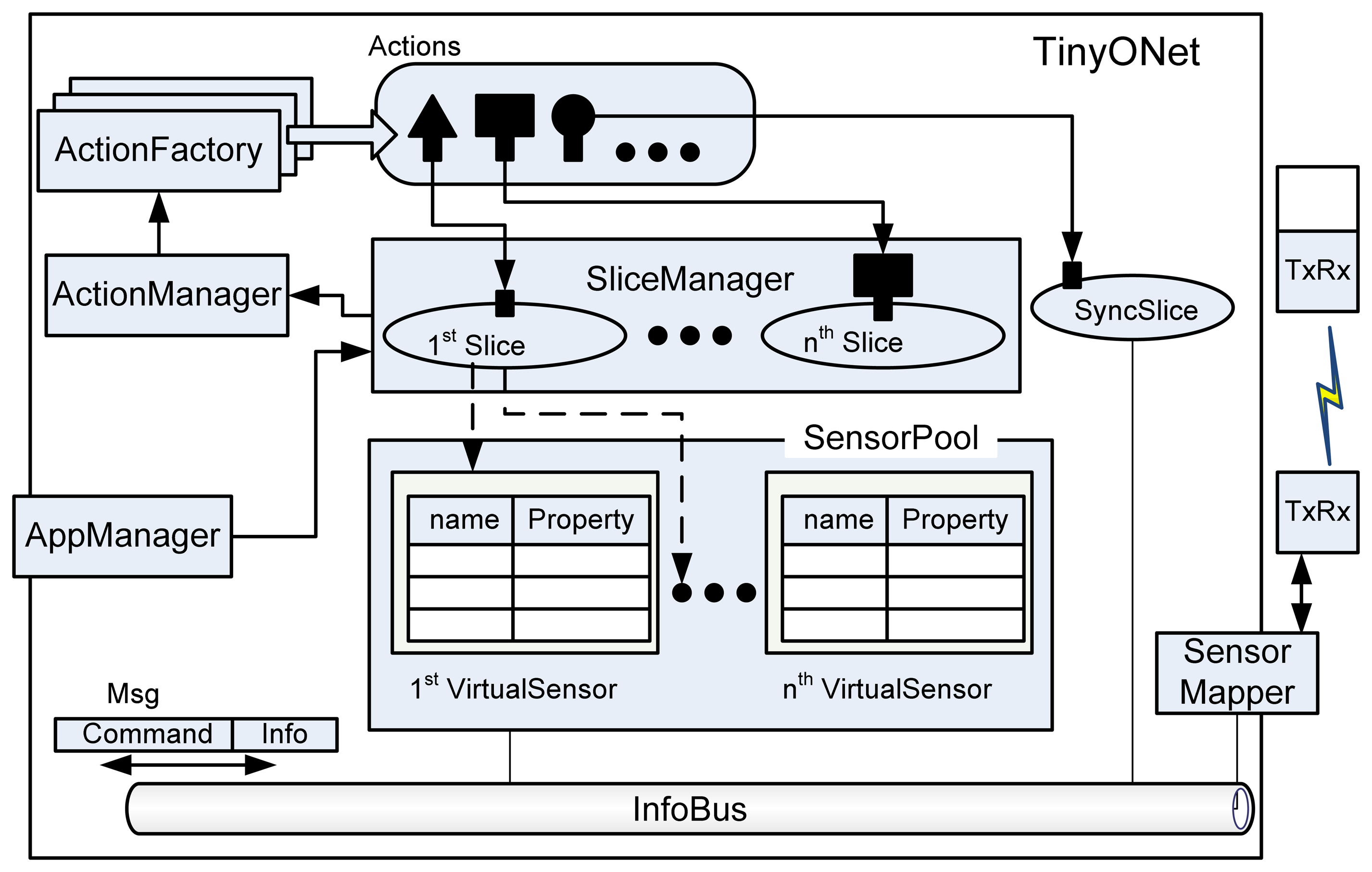
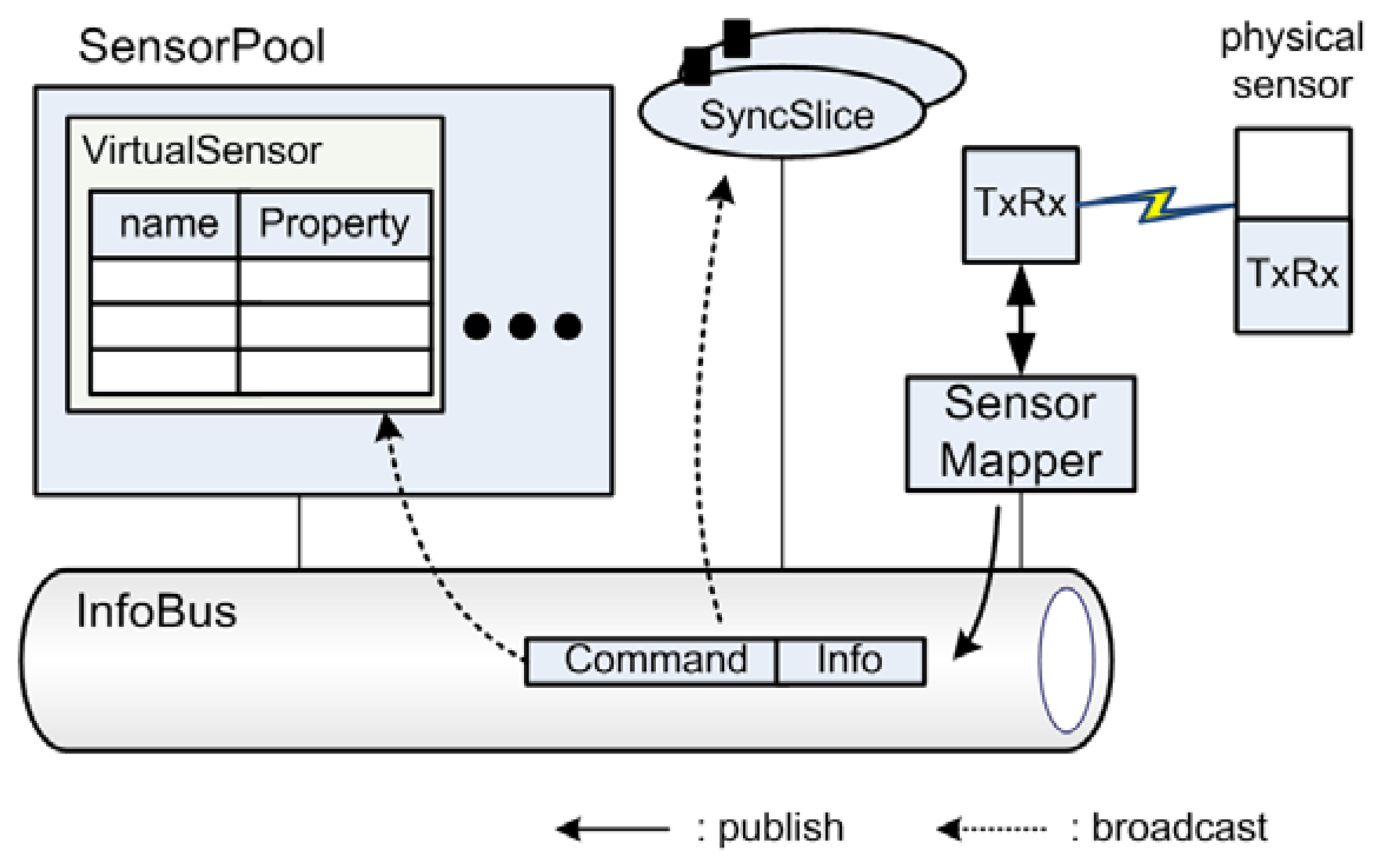
4.3. Message Delivery between Components
As like other Observer design pattern [
18] based MOMs, there are single Subject and multiple Observers in TinyONet.
InfoBus is the subclass of the Subject class and it is responsible for broadcasting incoming messages to the registered Observers.
SensorPool,
SensorMapper and
SyncSlices are the subclasses of the Observer class and they listen to
InfoBus. If a new data packet arrives at
SensorMapper from a sensing field, the packet is packaged into a
Msg and the
Msg is published on
InfoBus. Then, this
Msg is delivered to
SensorPool and the group of
SyncSlices. If
SensorPool is the
Msg's target, it will parse the
Msg and perform an ordered processing with
Command and
Info of the
Msg. In the case of
SyncSlices, they promptly process the
Msgs and perform the action on receiving
Msgs. Conversely, if there are some data to be delivered to physical sensors,
SyncSlices or
SensorPool will publish the data on
InfoBus. Then, this data is handed over
SensorMapper and then it is transmitted to physical sensors through
TxRx. This message-oriented communication is depicted in
Figure 5.
4.5. Communication between External Sensor Applications and Physical Sensors
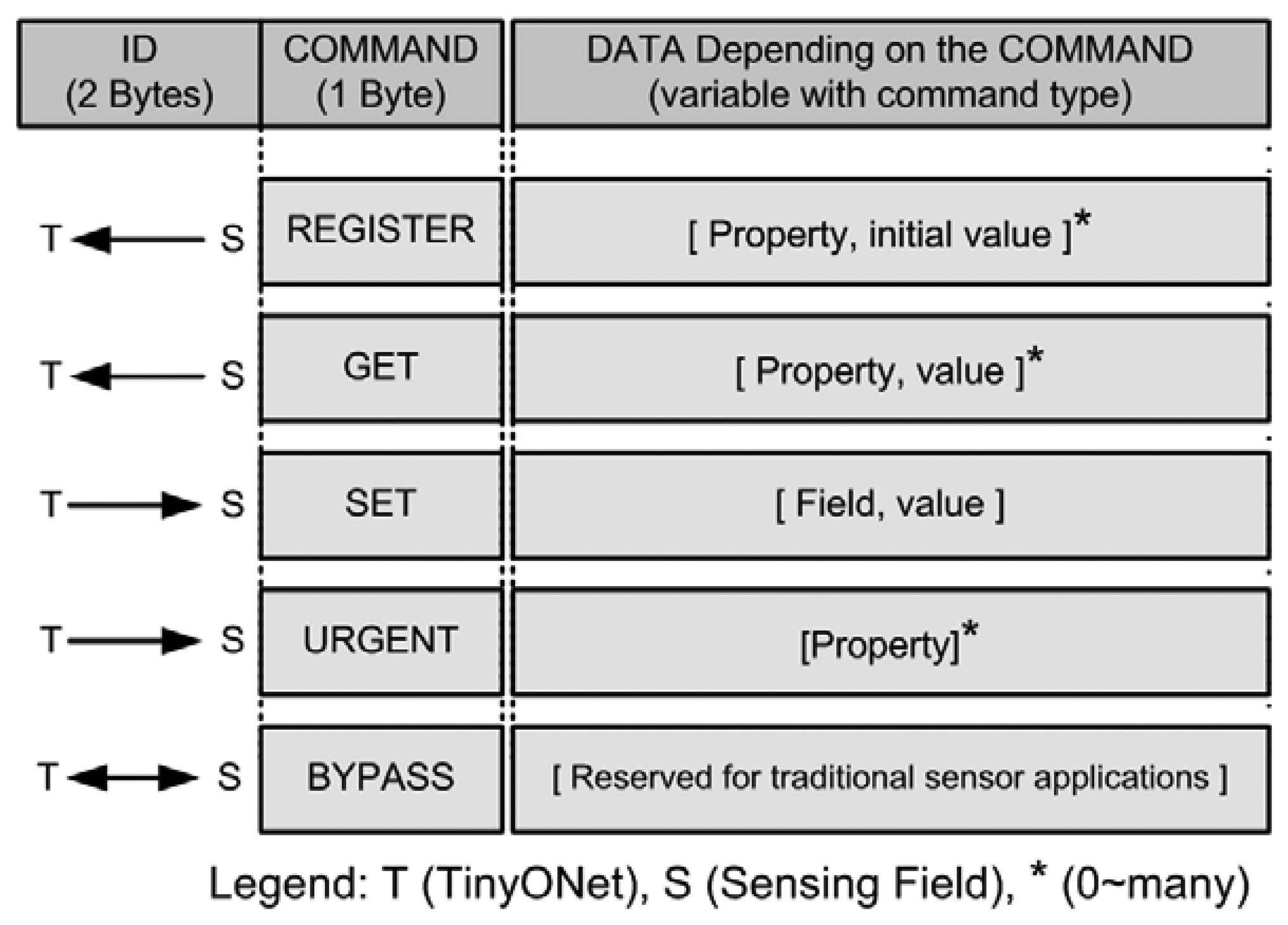
Up to now, most WSNs adopted their own proprietary network routing protocols instead of using IP and TCP/IP protocol stack because an authorized standard for WSN address scheme has not been established yet. In TinyONet, each sensor node is allocated a 16 bit address spanning from 0 ∼ FFFE and FFFF is reserved for the broadcast address. A TinyOS-based mote of our research, ZigbeX [
22], uses TOS_Msg format [
23] over ZigBee radio channel for its data communication. In order to transmit a packet, each mote composes its data packet with its ID, a command, and command dependent data as shown in
Figure 6, and then it puts the data packet in the payload of TOS_Msg. Since ZigBee uses a wireless channel, a transmitted TOS_Msg packet will be arrived at every mote. However, only a mote having the same ID of the packet will accept the packet. Each mote examines the ID of the transmitted packet and decides whether to drop or accept. If the ID of the packet is matched to its own ID, the mote will accept it. Exceptionally, a mote operating as a base station listens to every packet and delivers the arrived packet to its connected
SensorMapper, which decides whether to drop or accept. Although this proposed WSN protocol provides simple functions, this protocol can be easily extended or replaced without affecting TinyONet itself.
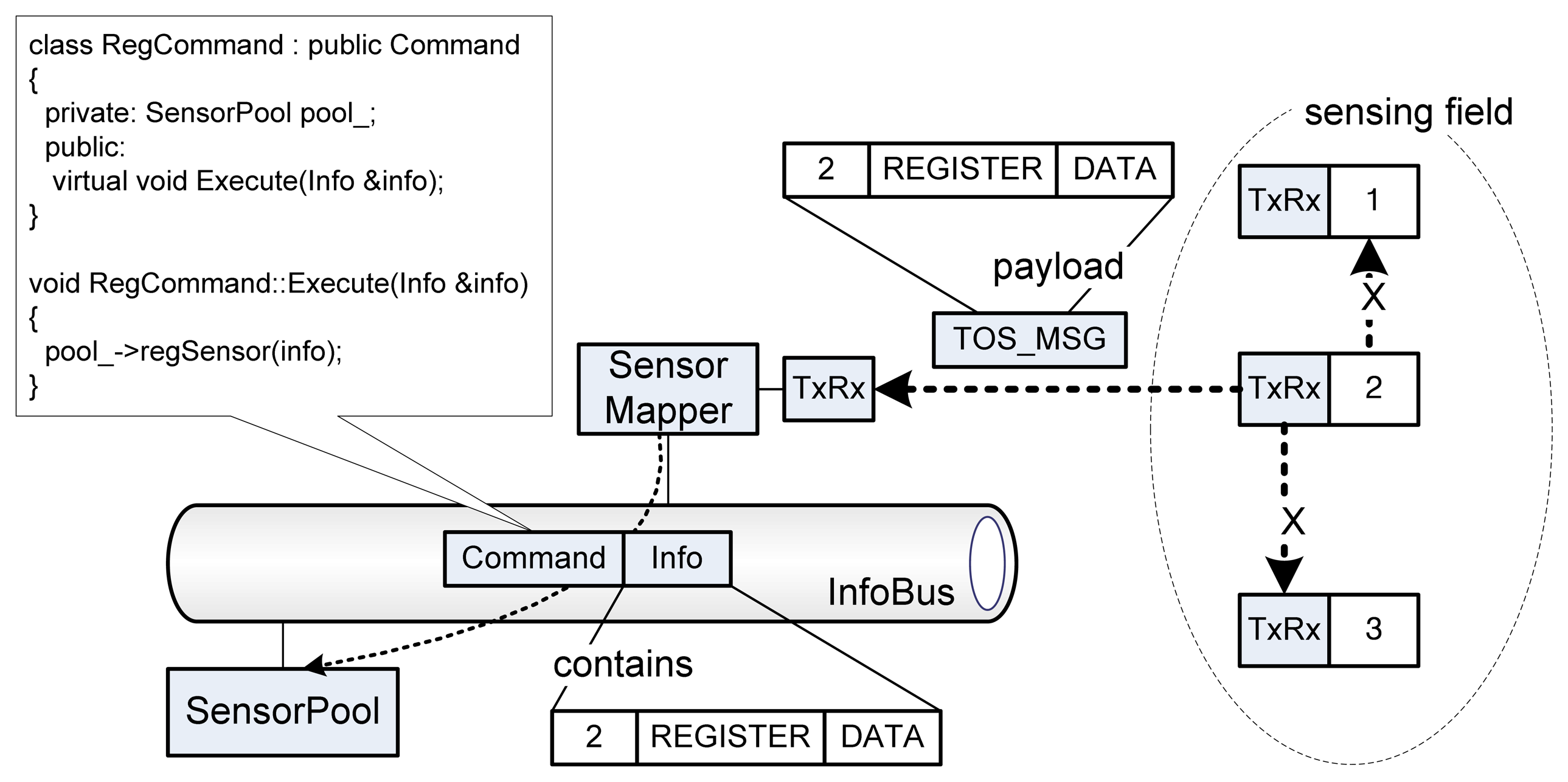
A packet transmission can be started from the sensing field or external applications. From the sensing field, one of the REGISTER, GET, or BYPASS packet is reported and the packet is served by corresponding
Command subclasses;
RegCommand,
GetCommand, and
ByRcvCommand. As shown in
Figure 7, if a sensor transmits a REGISTER packet containing its ID, the arrived packet on
SensorMapper will trigger to make a
RegCommand and an
Info class instances. Since the
RegCommand class inherits the
Command class, the delivered
RegCommand's command for creating new sensor (i.e. regSensor() function) will be executed from the target class,
SensorPool. The payload of TOS_Msg (i.e. the sensor's original packet) is stored into an
Info class instance and the instance is used by the concrete
Command class instance,
RegCommand. This packet processing based on Command design pattern [
24] can provide an advantage of extensibility. If a new kind of packet is required, TinyONet just adds the corresponding inherited
Command class which can handle the packet. Undoubtedly, this pattern enables smooth extensibility without ruining other parts of the system.
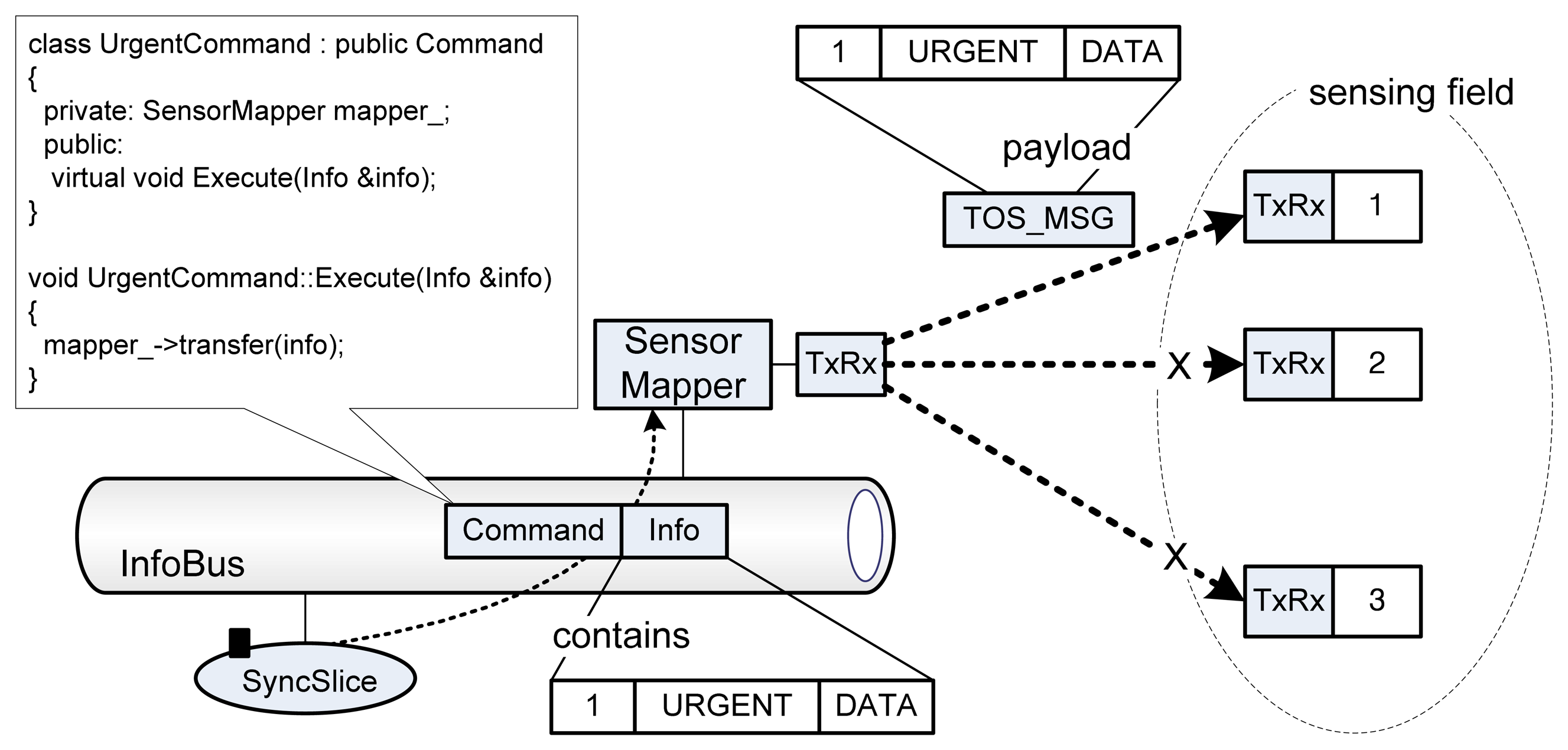
When an external sensor application needs to access specific sensor nodes, it can issue a request that invokes a BYPASS or an URGENT packet. The request is served a
SyncSlice and then the
SyncSlice creates an instance of
Command subclasses;
BySendCommand for the BYPASS and
UrgentCommand for the URGENT respectively. As shown in
Figure 8, if an URGENT packet is needed, a
SyncSlice prepares an
UrgentCommand and an
Info class instances. The
UrgentCommand contains a command that will be executed at
SensorMapper and the
Info instance contains the target sensor ID, URGENT command, and the related data. When the
UrgentCommand is delivered to
SensorMapper, the
UrgentCommands command for
SensorMapper's transferring code is executed. The code makes the URGENT packet with the contents of the
Info instance. Then, the URGENT packet is delivered to the target sensors on the sensing field. As described above, the only target sensor having the same sensor ID will accept the URGENT packet while other sensor nodes will drop the packet.
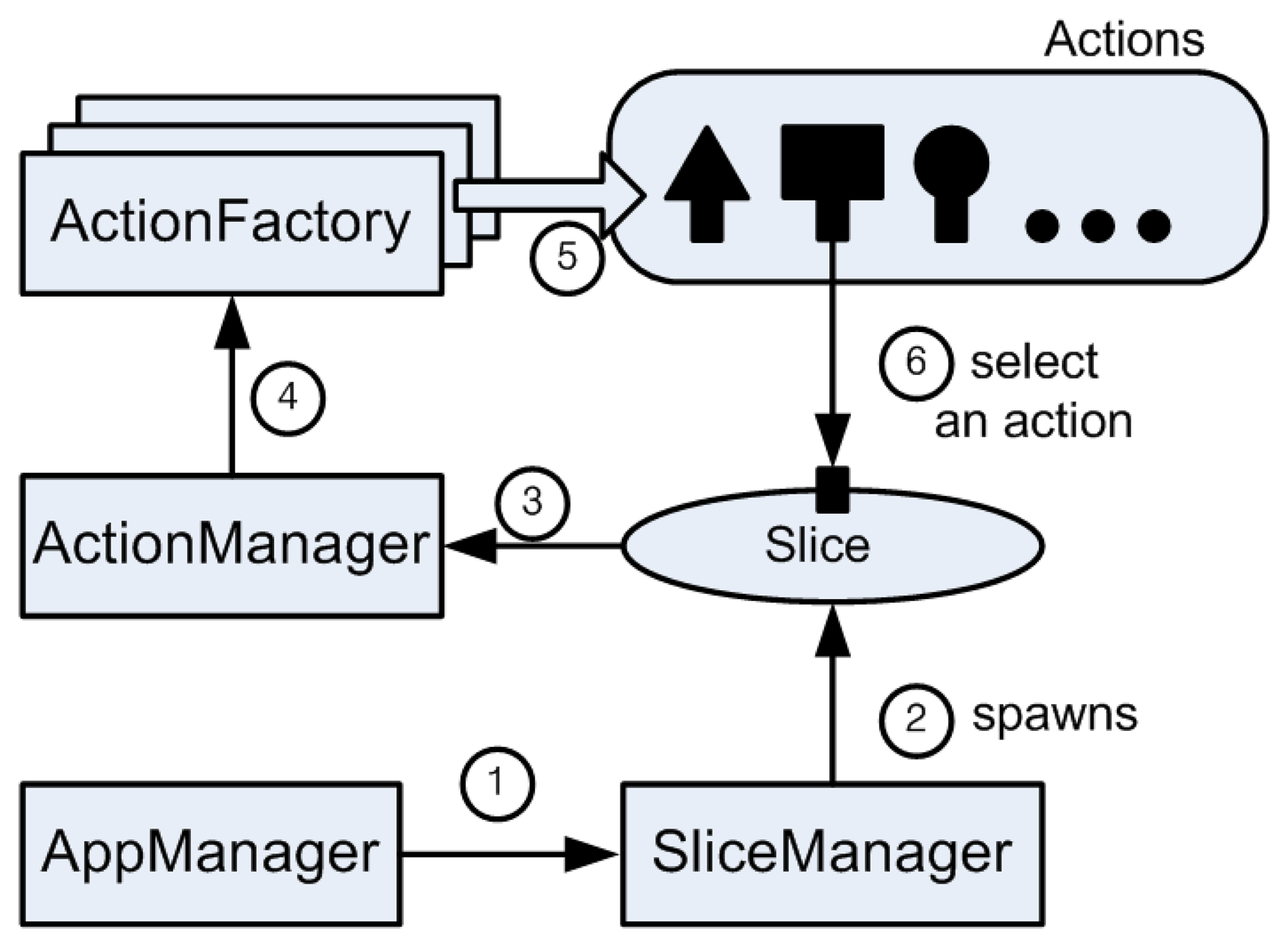
4.6. Customized WSN Services
When an external sensor application issues a request, it will send a request message to
AppManager as follows:
The [OP] field indicates a requested operation which
Slice will serve, such as calculating the maximum value of sensing data. The [OP_ARGUMENT] fields are variable depending on the [OP] field. When the request is arrived at the server socket of
AppManager, it delivers the request to
SliceManager. SliceManager spawns a new
Slice and it hands over the connected socket and the request message to the
Slice. Then, the
Slice chooses a proper
Action to serve the requested [OP] in cooperation with
ActionManager. After selecting an
Action, the
Slice orders the selected
Action to process [OP_ARGUMENT] fields. This procedure is depicted in
Figure 9.
Slice can freely choose different actions depending on the type of request. The mechanism is based on the Strategy design pattern [
19]. In this pattern, a main class can replace a strategy class according to situations. The adoption of the Strategy pattern provides two considerable advantages. First,
Slice class can provide different actions without its modification. It just chooses a proper
Action and delegates the
Action to serve an actual process. Second, there is no restriction on the argument format because the corresponding
Action is only responsible for understanding its argument. For example, the following MAX and REPORT requests may require different arguments, but
Slice is not necessary to understand the detail format.
Slice can handle all the requests in the same way because each corresponding
Action takes whole charge of handling its argument. These advantages enable third-party users to make and add customized services without affecting other parts of the system.
4.7. Dynamic Service Extension at Runtime
Undoubtedly, the Strategy design pattern enables TinyONet to extend its services without disturbing other parts of the system, but the pattern is effective only when the system is recompiled at the source code level. That is, the adoption of the Strategy pattern is not sufficient to guarantee the dynamic addition of new services at runtime, therefore other technical methods should be considered to support the dynamic service extension.
Usually, it is difficult to dynamically extend the compiled C++ code, because a developer cannot know the name of class to be made after the development phase. For example, if an ‘average’ action is needed, a developer may want to write codes as like this:
However, this coding is nearly impossible because the developer cannot know the name of the target class, ‘AverageAction’, in advance. Needless to say, the AverageAction class will be developed after the code is released.
We overcame the issue by combining the Abstract Factory pattern [
20] with the C++ dynamic loading [
25]. The C++ dynamic loading enables the compiled code to use the classes in Dynamic Linked Library (DLL). However, this binary level extension also has the same weakness as described above. In the case of using the C++ dynamic loading, a developer still has to know the target class name in advance. The Abstract Factory pattern can be a missing part of the solution to the problem. As shown in
Figure 10, each Factory class is dynamically loaded from DLLs and it is stored into the Map data structure with its action's name as the key. When an action is requested, the corresponding Factory class is retrieved from the Map and then the Factory class creates the instance of requested action. Using this combining method, the dynamic service extension at runtime is possible without indicating class names in the source code.
4.8. Providing Synchronous Access and the Node-Centric Communication
If a physical sensor receives an URGENT packet, it promptly reports the requested sensing data using a GET packet. When an URGENT packet is used, SyncSlice is allocated instead of the ordinary Slice. Since the SyncSlice class is inherited from both Observer and Slice classes, it can act as not only Slice, but also the Observer. It means that the GET packet fired by the URGENT packet is directly delivered to the corresponding SyncSlice and then the SyncSlice promptly reacts to process the packet. With this synchronous access mechanism, external sensor applications can get the latest data in the case of the query-driven reporting model. Additionally, the GET packet is also delivered to the SensorPool and it is used to update the corresponding VirtualSensor's data for efficiency.
When an external sensor application needs to bypass TinyONet and directly communicate with physical sensors, it can use the BYPASS request as follows:
When TinyONet receives this request, it allocates a SyncSlice to handle the BYPASS request and then the SyncSlice sends the [BYPASS_custom data] to the target physical sensor using a BYPASS packet. Reversely, if a physical sensor needs to bypass TinyONet, the sensor can also use a BYPASS packet. If a BYPASS packet is transmitted from physical sensors, it is delivered to the listening SyncSlice that is connected to the requesting external sensor application. Then, the SyncSlice just relays the packet's data to the application. During the process, the SyncSlice does not touch but just relay the data between two networks. Comparing to the synchronous access using the URGENT/GET packets, a BYPASS packet does not update VirtualSensor's data because the BYPASS packet is designed to provide a direct passage that detours around TinyONet.
5. Experiments and Evaluation
In order to make an experimental sensing field, we deployed ten sensor motes. One mote is connected to TinyONet as the base station of the sensing field and the remained nine motes are deployed in three rooms. We have located three motes in each room's corner in order to evaluate the effectiveness of TinyONet. We conducted two experiments to examine the response time and the accumulated number of generated packets on WSN.
5.1. Response Time
In the first experiment, external sensor applications concurrently gathered the temperature data of three rooms with two cases; a conventional WSN and TinyONet. To examine the response time of concurrent applications, we performed the test ten times by increasing the number of sensor applications one by one. To emulate conventional WSN, the URGENT and GET packets were used to provide the synchronous communication. For the case of TinyONet, the REGISTER and GET packets were used as usual.
Response time,
Tresponse_time, is defined as the amount of time that the last sensor application takes to get the response when several external sensor applications issue a request simultaneously. As shown in
Equation (1),
Tresponse_time is composed of three factors;
Ttransmission,
Tprocess, and
Twsn. Ttransmission is the transmission time between a sensor application and TinyONet.
Tprocess is the processing time within TinyONet.
Twsn is the elapsed time to complete gathering sensing data on WSN.
The graph in
Figure 11 shows the response time of two cases. The graph indicates that the response time of the conventional WSN is linearly increased according to the number of sensing applications. Comparing to this, the response time of TinyONet is nearly constant value regardless of the number of sensor applications. We identified that the difference is caused from
Twsn . Both cases have similar
Ttransmission and
Tprocess, but they have totally different
Twsn . In ordinary WSN, only a single packet can be transmitted at a time over radio due to the lack of the channel multiplexing. That is, multiple requests from concurrent sensor applications have to be queued and processed one by one on WSNs. For this reason, in the conventional WSN, the response time of the n-th sensor application,
Tresponse_time (
n), can be modeled as
Equation (2).
While the
Twsn of the conventional WSN is affected by the number of sensor applications, the
Twsn of TinyONet is nearly regular because the elapsed time for completing the report session is independent of the number of external sensor applications. Since the data packets on WSN are asynchronously transmitted independent of the external sensor applications' request,
Twsn is considered as a constant value. Therefore, the response time of the n-th sensor application in TinyONet can be modeled as
Equation (3). As shown in the equation, all the applications share the same elapsed time,
Twsn_common for communicating with WSN.
Generally, Ttransmission and Tprocess are much smaller than Twsn_common, therefore the response time of TinyONet seems a constant value regardless of the number of sensor applications.
5.2. Accumulated Number of Generated Packets
The purpose of the second experiment was to examine the number of generated packets on WSN when different data update cycles are given. Since the data update cycle means periodic time for fetching latest data from WSNs, a request interval of conventional WSN and a reporting cycle of TinyONet can be considered as the data update cycle. In the case of the conventional WSN, a single sensor application is used to issue a request to each sensor by changing the request interval of 60, 120, or 180 seconds respectively. If the sensor application selects the request interval of 120 seconds, each sensor will receive a request at every 120 seconds. For TinyONet, a single sensor application was connected to TinyONet, which changed the sensor's reporting cycle of 60 or 120 seconds. We also added a random reporting cycle to the case of TinyONet. The random reporting cycle emulates a realistic sensing environment where sensor nodes report only if they have the sensing data to report. The range of random reporting cycle spanned from 30 seconds to 600 seconds.
We made the
TxRx module of TinyONet record all incoming and outgoing packets regardless of its transmission success. The packet on the
TxRx module is stored in the TOS_Msg format [
23]. The message format consists of seven bytes header, payload and two bytes CRC (Cyclic Redundancy Check). The TinyONet packet is stored in the payload of the TOS_Msg. In the case of the conventional WSN, a BYPASS packet (17 bytes) was used to broadcast data gathering message and to transmit a request packet to a specific sensor node. Each sensor node also used the same BYPASS packet to report its sensing data. In the case of TinyONet, each sensor node used a REGISTER packet (23 bytes) to register itself and a GET packet (17 bytes) to report its sensing data.
Undoubtedly, the shorter data update cycle will generate more data packets on WSN. In
Figure 12, we can see the fact that the packet number of ‘Conventional-60 sec’ exceeds that of ‘Conventional-120 sec’ and ‘Conventional-180 sec’. Although the shorter data update cycle generates more packets, it lets external sensor applications and virtual sensors have more recent data. For the same data update cycle, the generated packets of TinyONet are much less than those of conventional WSN. While a single session of conventional WSN is composed of a request and a response phases, a reporting phase solely consists of a single session in TinyONet. In view of the data update, fewer packets of TinyONet can make the same effect of data update in the conventional WSN. In addition,
Figure 12 shows that TinyONet having the random reporting cycle generates much fewer packets on WSN. It means TinyONet's performance can be much better under the realistic sensing environment.
5.3. Evaluation
We evaluated the TinyONet in two aspects; the performance results and the design principles. Additionally, we will discuss the future study of TinyONet.
Reusability of Sensing Data
TinyONet is designed to support the reusability of sensing data. For example, if a heater raises the temperature of a room, the temperature data is cached on its corresponding virtual sensor. Then, the cached sensing data can be repeatedly used to serve a lot of sensor applications without performance degradation. The experiments in Sections 5.1 and 5.2 proved that the reusability of sensing data is greatly useful for the improvement of the response time and reducing the packet transmission.
Providing Diverse Communication Methods
In the experiment in Section 5.2, TinyONet showed that it can support both the node-centric and the data-centric communication methods. Mainly, TinyONet is designed to support the data-centric communication, but it also enable conventional WSN applications to use the node-centric communication with a BYPASS request. The experiment of Section 5.1 showed that TinyONet can also support the synchronous access.
Dynamic Adoption of Various Sensing Data
To satisfy diverse sensor applications' requirements, TinyONet is designed to dynamically adopt various kinds of sensing data. To verify this feature, we located a new kind of physical sensor and ordered it to report its location and energy. Then, we checked whether the corresponding VirtualSensor to handle new properties well and to report the properties to external sensor applications as usual. The result was successful.
Dynamic Service Extension at Runtime
To show the feasibility of the dynamic service extension, we made a new Action class calculating an average value and we uploaded it to the running TinyONet. After uploading, we checked that an external sensor application could request the uploaded ‘average’ action for the average value of the first room's temperature. The result was successful. Since the ‘average’ action is not bundled at deployment time, we can verify that the dynamic service extension at runtime is successfully performed.
Providing Sophisticated Functional Components
To verify that TinyONet can provide highly sophisticated functional components, we made a ‘FireAlaram’ Action class. The Action checked the temperature of the same room and notified an alarm when all three motes simultaneously reported an abnormal high temperature. After uploading this Action, we let physical sensors in the same room report very high temperature. The Action handled this reporting as we expected. It shows TinyONet can load various services not only for simple reporting functions, but also for complex and sophisticated functions. Theoretically, third-party users can make any kind of Action class if a new Action class inherits the original Action class.
Future Study
In spite of the remarkable results of this research, several design issues are still remained to be deeply considered. The first issue is a security risk related to the dynamic service extension. Although the dynamic service extension is very useful, it makes system be vulnerable as [
26] indicated. To resolve the issue, the code signing or secure uploading channel has to be implemented. Although this feature is not considered yet in the current implementation, we have a plan to add the feature to the next version of the system. Another issue is the cooperation of multiple TinyONets. If several virtual sensors on different TinyONets can cooperate and fuse their sensing data, external sensor applications can treat virtual sensors as the normal computing resources, just as the current GRID technology does. We think that this issue is noteworthy for studying intensively.
6. Conclusions
Recently, in the WSN research field, protocol bridge projects have been rapidly gaining researchers' attention. The previous research has focused on providing external sensor applications with the transparent end-to-end communication in the node-centric manner. This protocol bridge has been expected to trigger a variety of application domains, but existing studies have several issues to be seriously discussed, especially the reusability of sensing data and the support of the data-centric communication.
To resolve these issues, we suggested a new protocol bridge system called TinyONet which maintains virtual sensors as a virtual counterpart of physical sensors. In TinyONet, virtual sensors cache the reported sensing data from their corresponding physical sensors and dynamically group themselves into a functional entity named Slice which provides various WSN services. Using this mechanism, TinyONet can serve various and heterogeneous requests from multiple sensor applications with the cached sensing data. As a result, the response time is improved and the number of communication packets on WSN is reduced. In TinyONet, if a new service is required, it can be dynamically added without stopping the system. It can also support the node-centric communication for traditional sensor applications and the synchronous access for the query-driven reporting model. This research shows that the proper caching architecture in the protocol bridge can improve the communication efficiency of WSNs and can provide versatile data access methods as well.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











