
Response of Drone Electronic Systems to a Standardized Lightning Pulse


Abstract
:1. Introduction
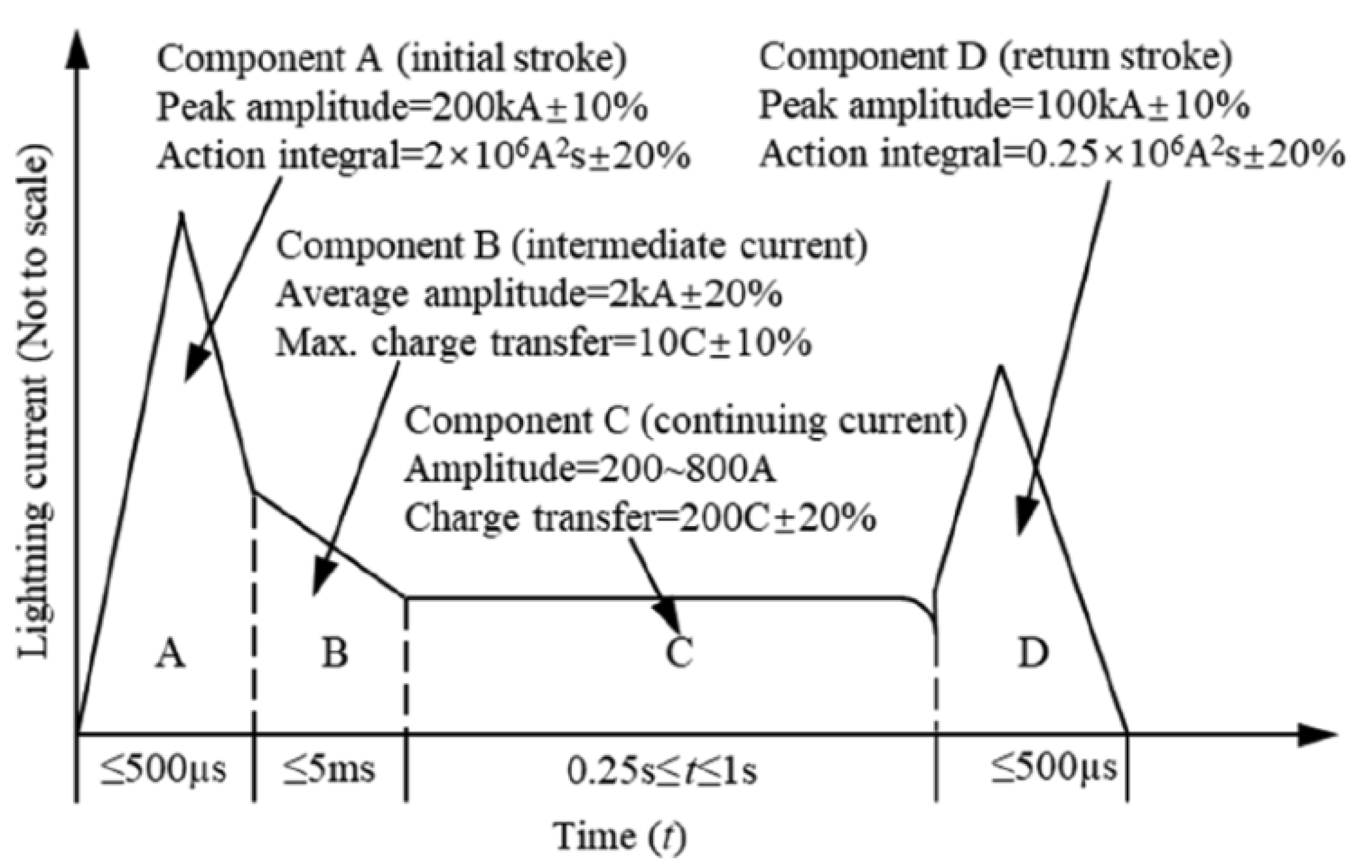
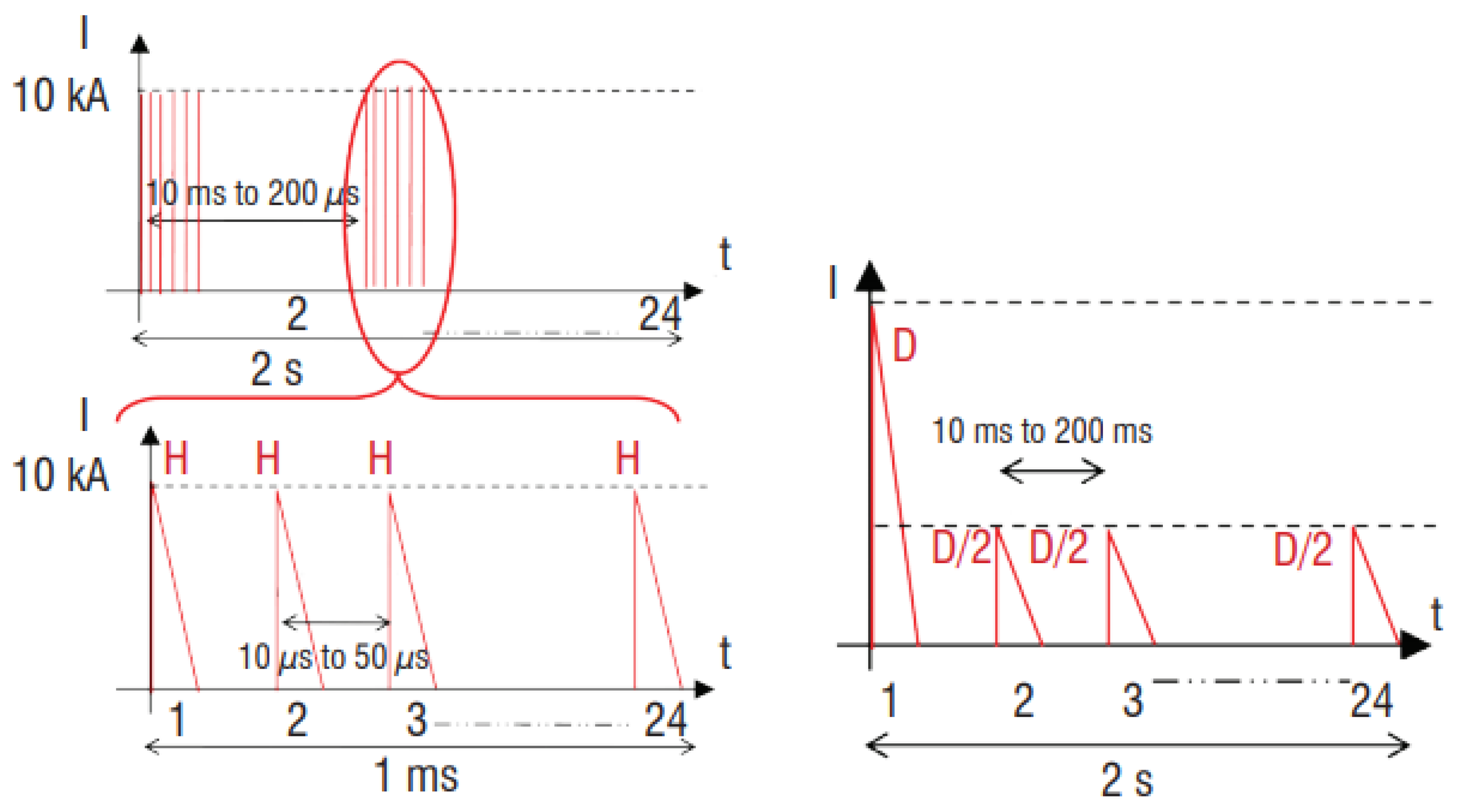
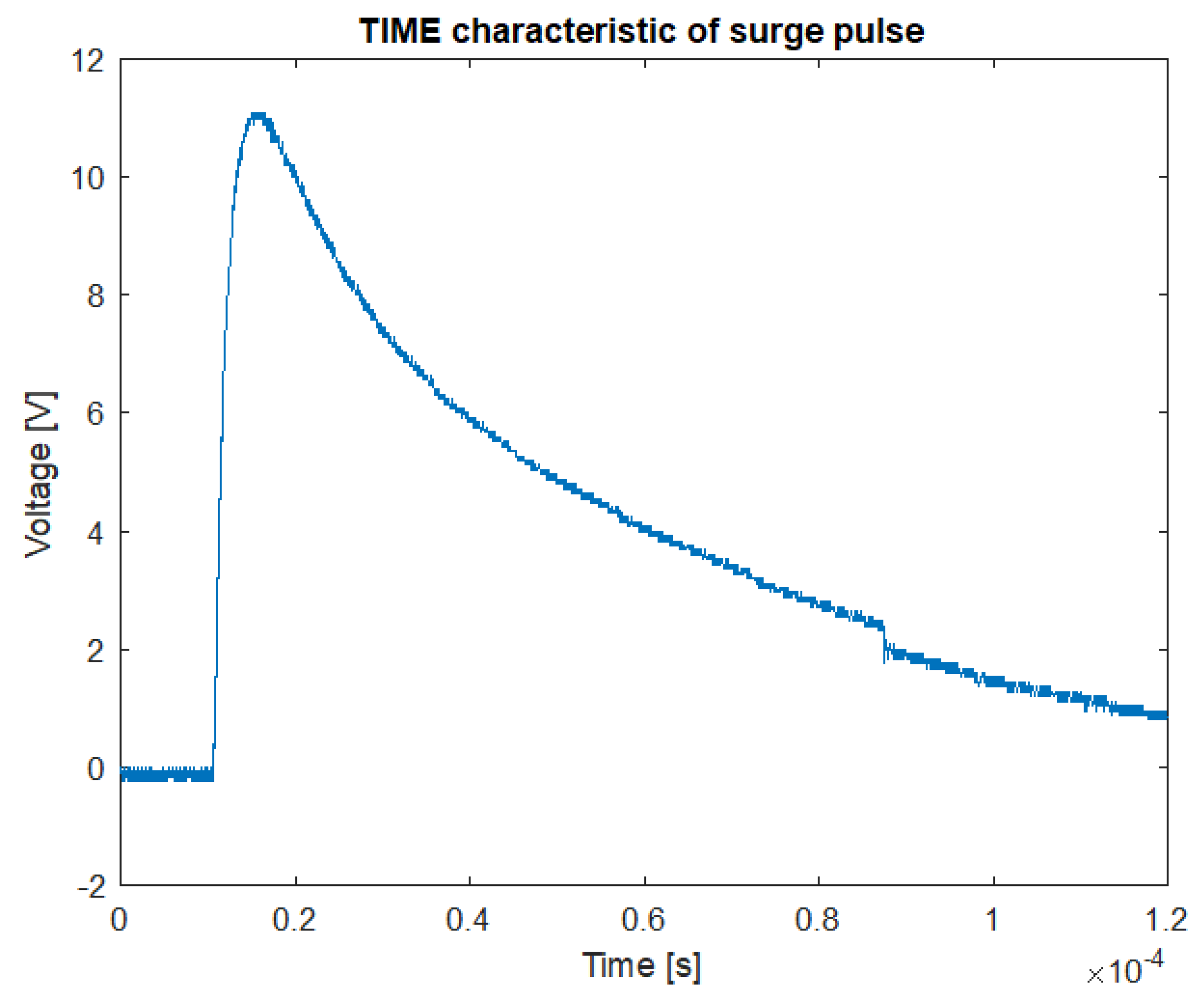
2. Lightning Electromagnetic Field
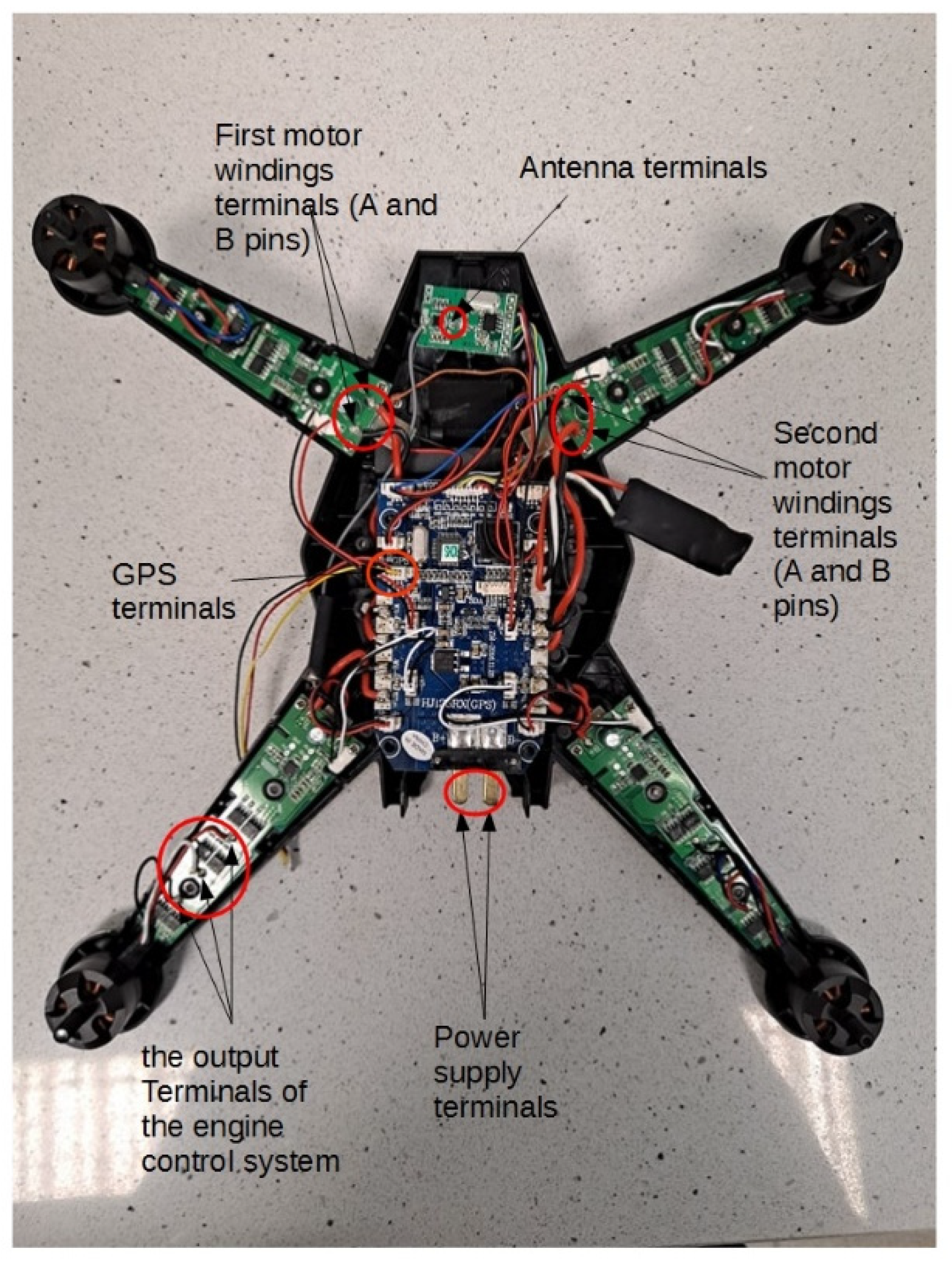
3. Main Components of Unmanned Aerial Vehicles
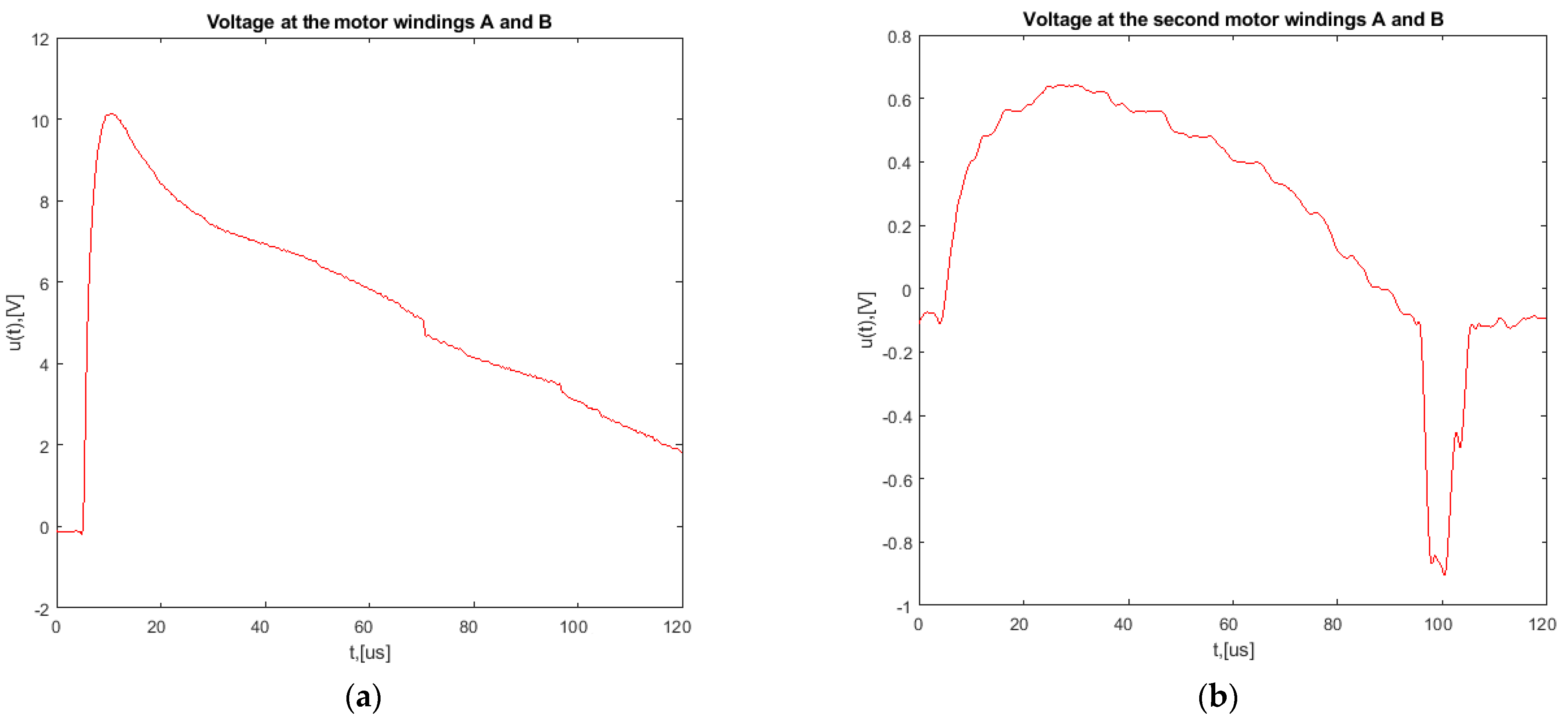
4. Response of Selected Drone Components to Standardized Lightning Pulses
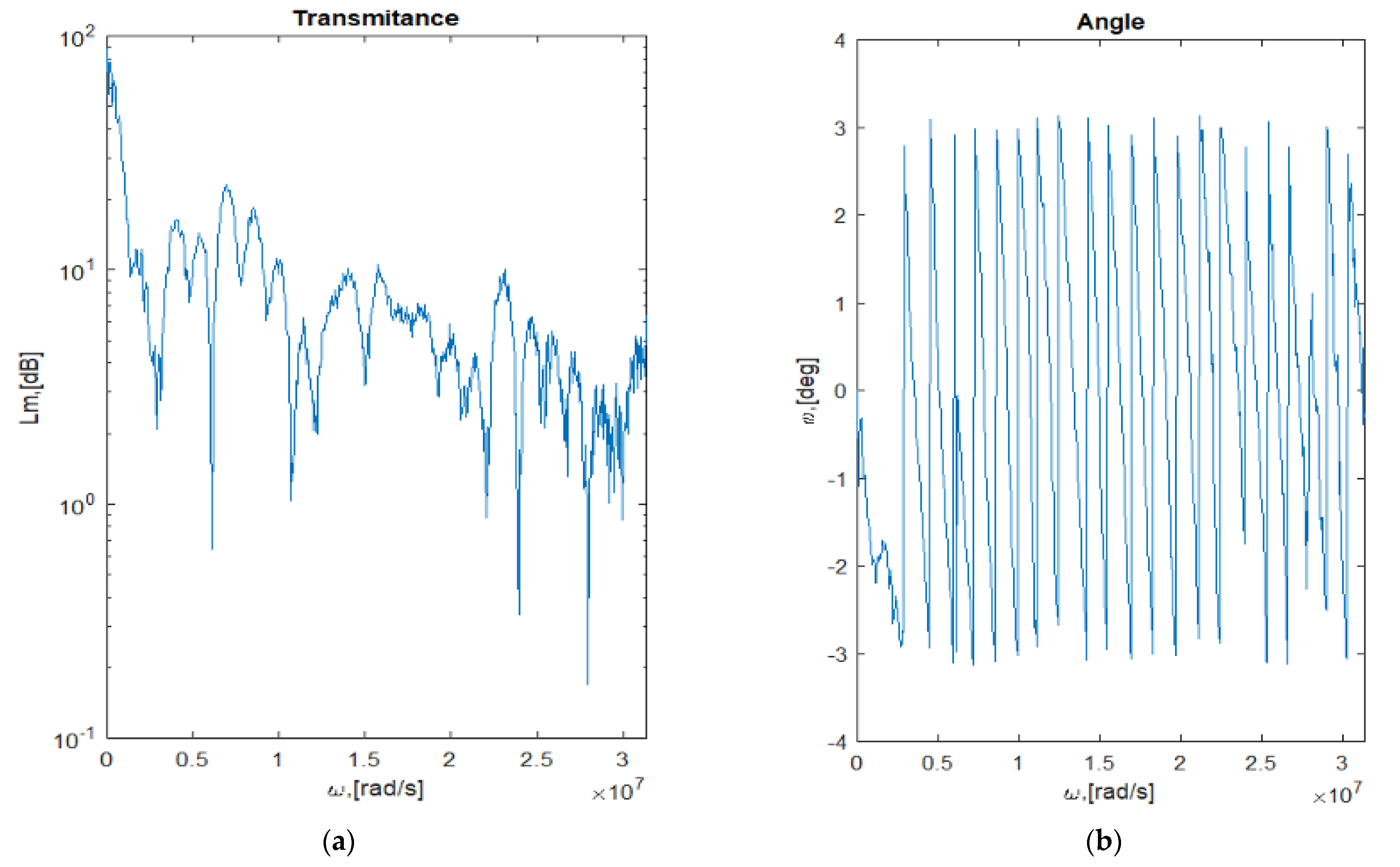
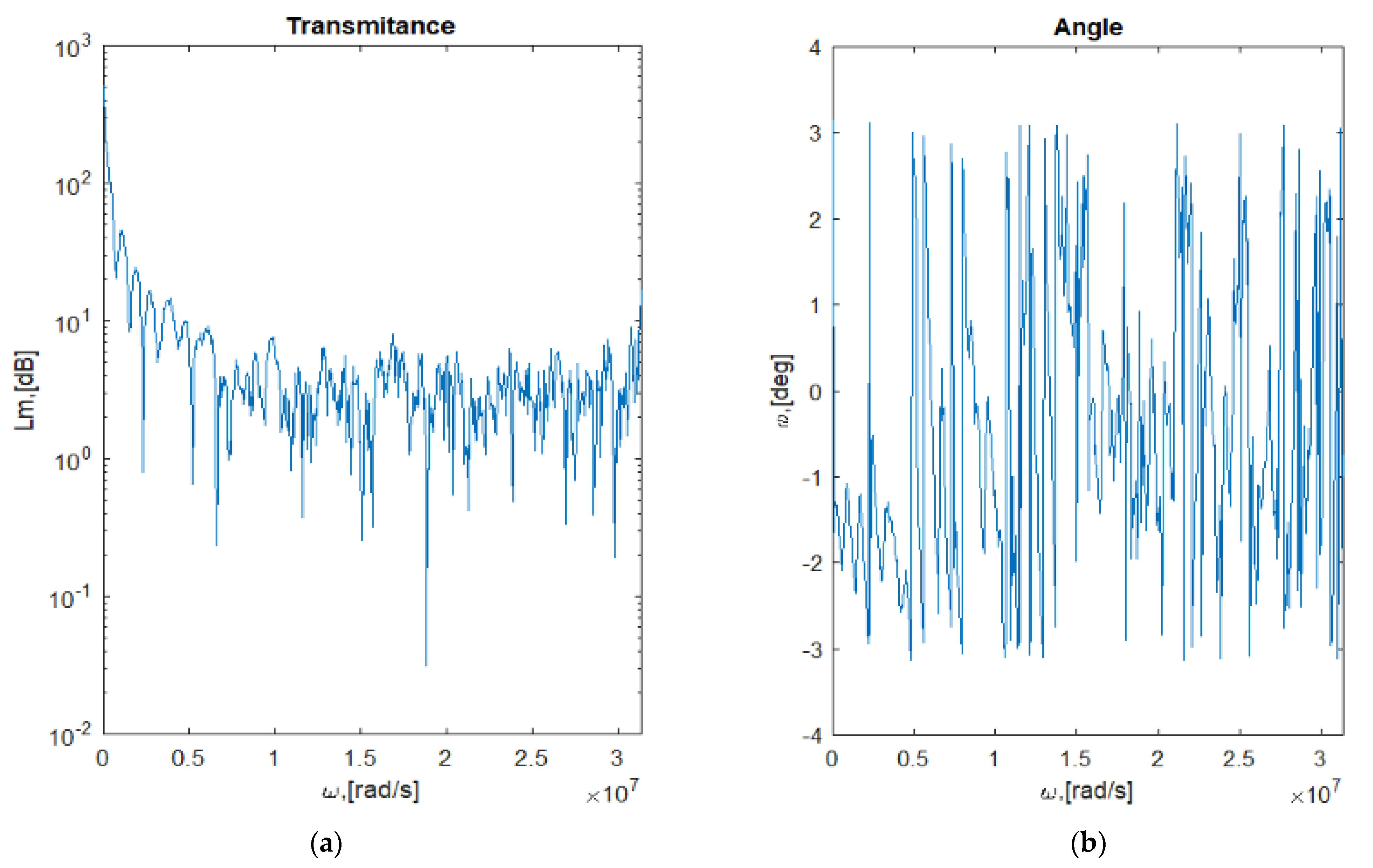
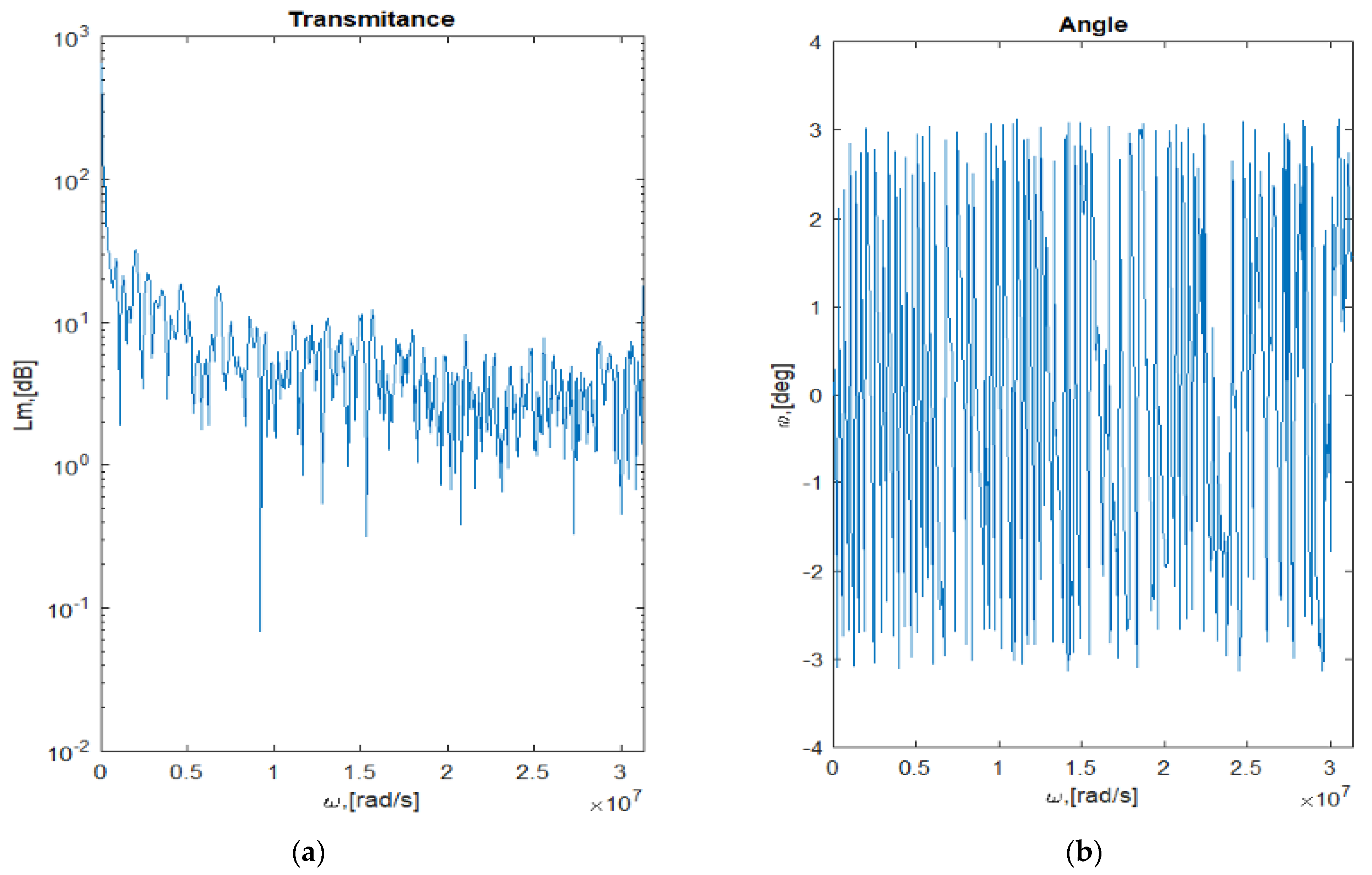
4.1. Transfer Function of the Analyzed System
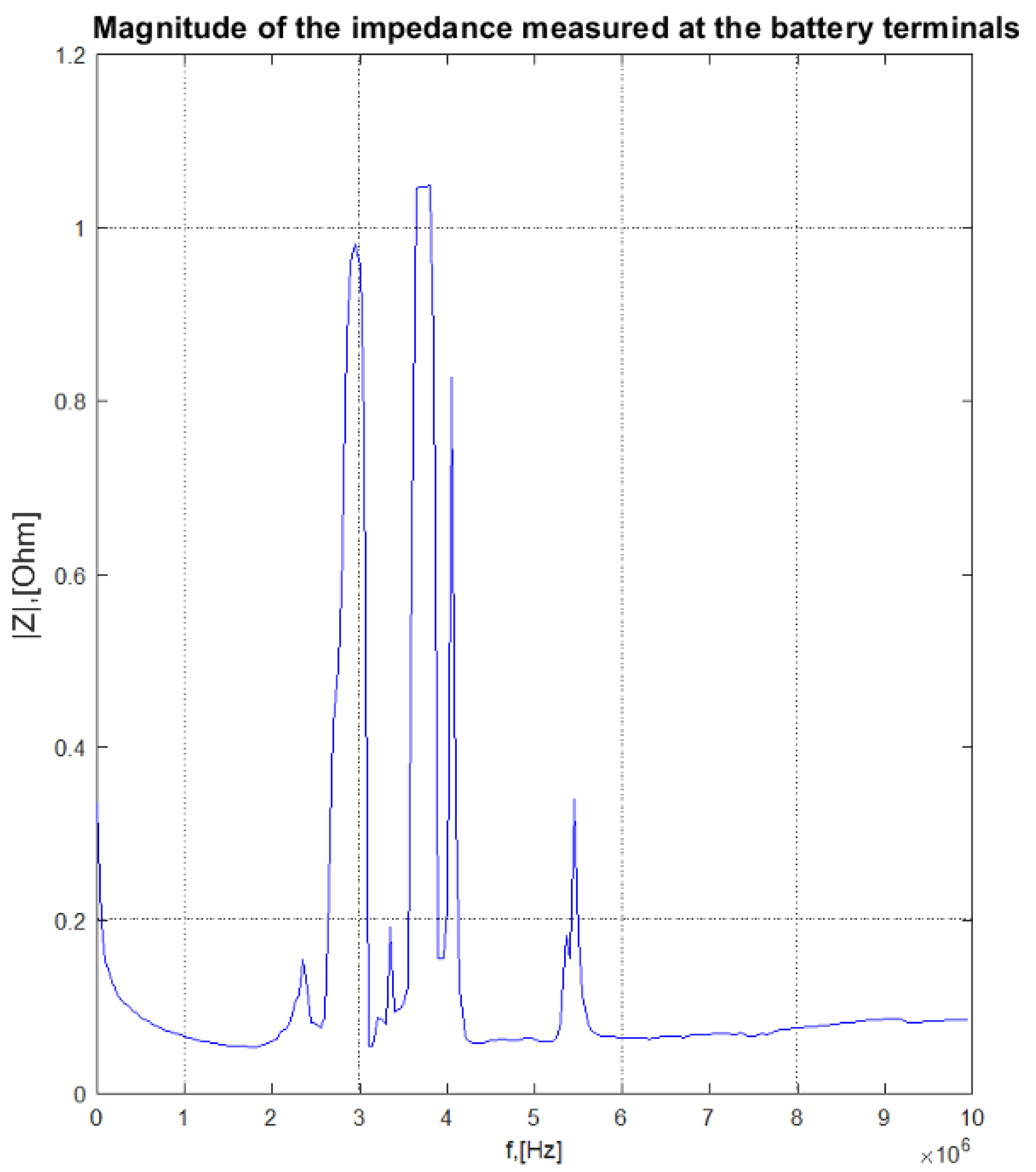
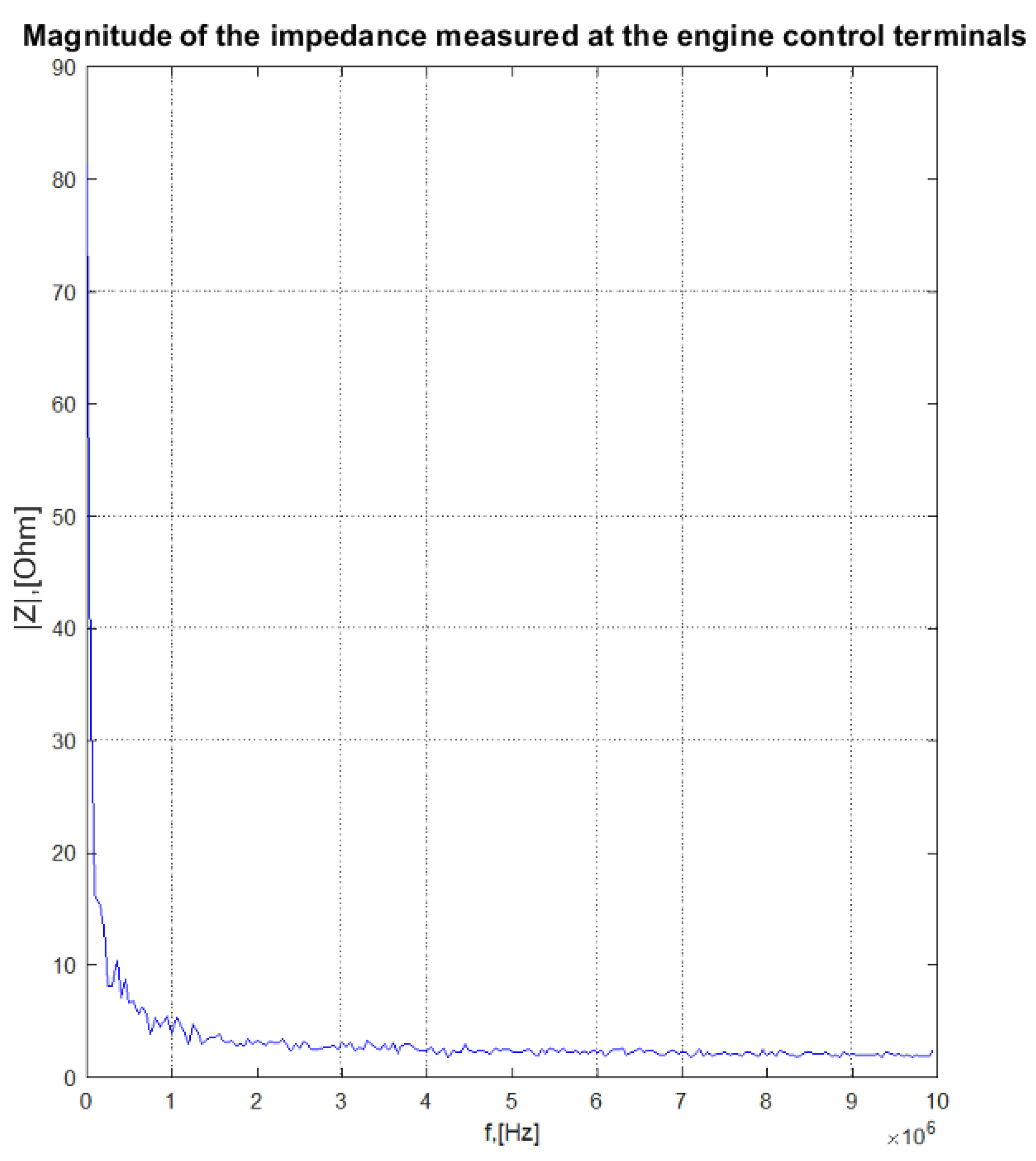
4.2. Selected Circuits Impedance
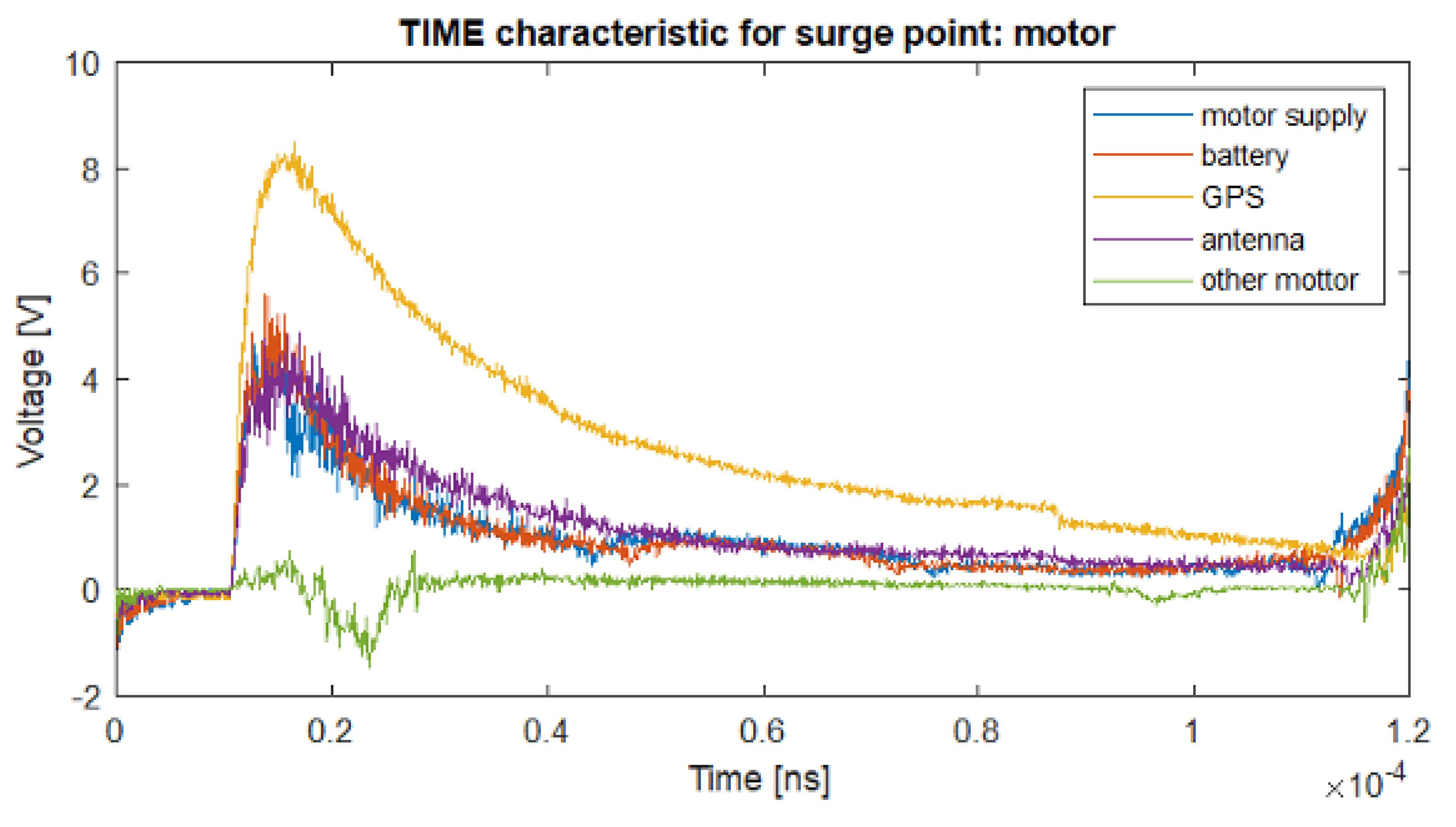
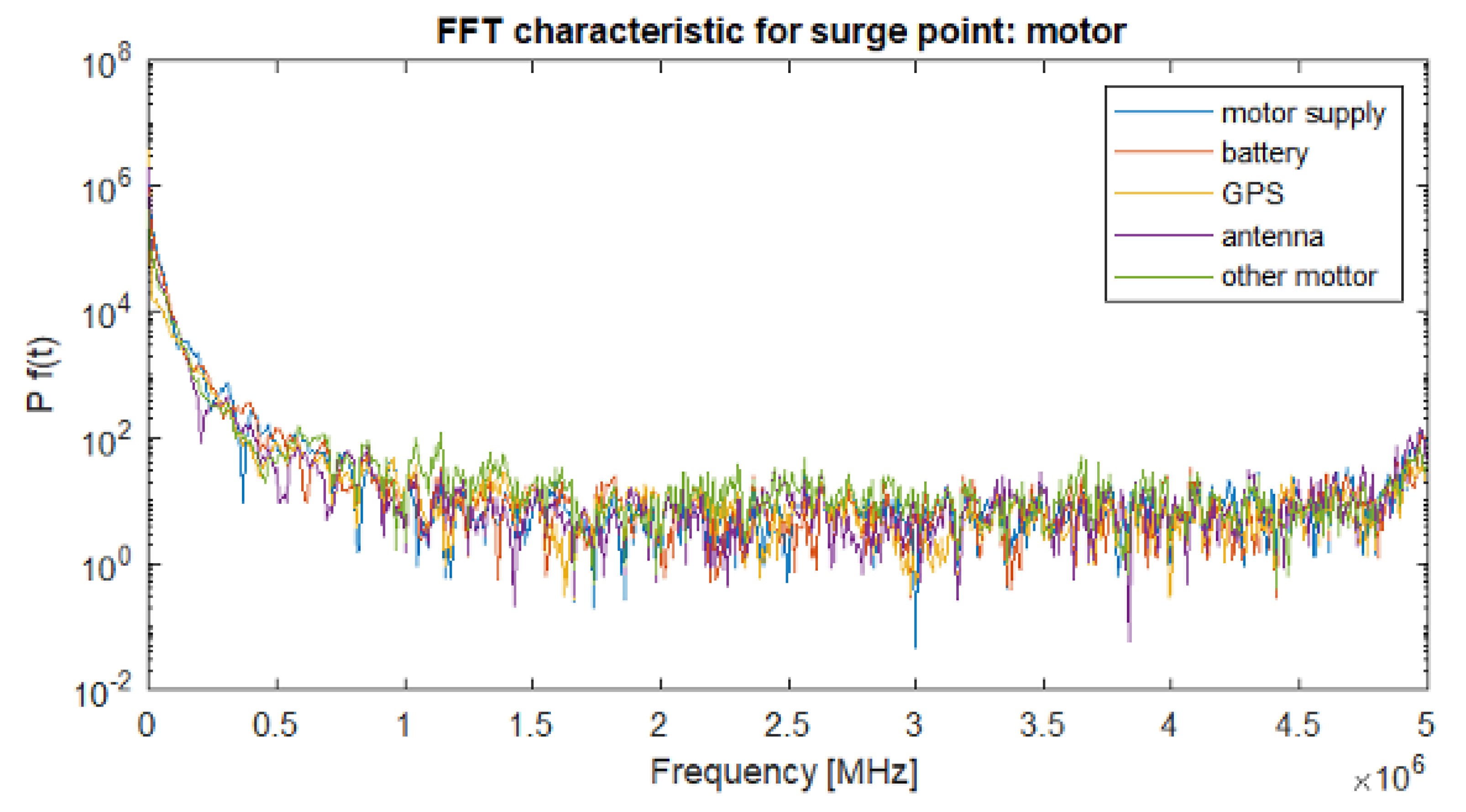
4.3. Transient Impulse Flow Model
5. Conclusions
- The development of the dependence of the impedance of individual drone circuits depending on the signal frequency
- The development of the transmittance of these circuits
- The determination of polynomial transmittance formulas for the mathematical description of the studied dependencies
- A preliminary model illustrating the flow of overvoltage inside the drone’s electronics for a given disturbing impulse
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Divya, J. Exploring the Latest Drone Technology for Commercial, Industrial and Military Drone Uses. 2017. Available online: https://www.businessinsider.com/drone-technology-uses-2017-7?IR=T (accessed on 5 April 2021).
- Barr, L.C.; Ancel, E.; Foster, J.V.; Klyde, D.; Evans, J.; Belcastro, C.M.; Newman, R.L. Preliminary Risk Assessment for Small Unmanned Aircraft Systems. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Poelman, D.R.; Schulz, W.; Diendorfer, G.; Bernardi, M. The European lightning location system EUCLID—Part 2: Observations. Nat. Hazards Earth Syst. Sci. 2016, 16, 607–616. [Google Scholar] [CrossRef] [Green Version]
- Gaynutdinov, R.R.; Chermoshentsev, S.F. Study of Lightning Strike Impact on Unmanned Aerial Vehicle. In Proceedings of the 2016 17th International Conference of Young Specialists on Micro/Nanotechnologies and Electron Devices (EDM), Erlagol, Russia, 30 June–4 July 2016. [Google Scholar]
- Masłowski, G.; Wyderka, S. Układ probierczo-pomiarowy do poligonowych badań narażeń piorunowych. Prz. Elektrotech. 2012, 88, 67–72. [Google Scholar]
- Masłowski, G. Analysis and Modeling of Lightning Discharges for Overvoltage Protection; Publisher AGH: Kraków, Poland, 2010. [Google Scholar]
- Bogucki, J.; Chudziński, A.; Połujan, J. Emisja Elektromagnetyczna Urządzeń w Praktyce, Telekomunikacja i Techniki Informacyjne 1–2; Instytut Łączności — Państwowy Instytut Badawczy: Warsaw, Poland, 2007; pp. 85–95. [Google Scholar]
- Lin, T.; Uman, M.A.; Tiller, J.A.; Brantley, R.D.; Krider, E.P.; Weidman, C.D. Characteryzation of lightning return stroke electric and magnetic fiels form simultaneous two-station measurements. J. Geophys. Res. 1979, 84, 6307–6314. [Google Scholar] [CrossRef]
- RTCA DO-160. Environmental Conditions and Test Procedures for Airborne Equipment; Radio Technical Commission for Aeronautics: Washington, DC, USA, 2010. [Google Scholar]
- PN-EN 62305-1:2011. Lightning Protection—Part 1; BSI Standards Publication: London, UK, 2011. [Google Scholar]
- PN-EN 61000-4-5:2014-10. Electromagnetic Compability (EMC)—Part 4–5: Methods of Research and Measurement—Shock Resistance Test; International Electrotechnical Commission: Geneva, Switzerland, 2014. [Google Scholar]
- Gaynutdinov, R.R.; Chermoshentsev, S.F. Electromagnetic Stability of an Unmanned Aerial Vehicle at the Indirect Effect of a Lightning Discharge. In Proceedings of the 2017 International Multi-Conference on Engineering, Computer and Information Sciences (SIBIRCON), Novosibirsk, Russia, 18–22 September 2017. [Google Scholar]
- Filik, K.; Hajder, S.; Masłowski, G. Multi-Stroke Lightning Interaction with Wiring Harness: Experimental Tests and Modelling. Energies 2021, 14, 2106. [Google Scholar] [CrossRef]
- Altman, S.S.; Vulfin, V.; Leibovich, H.; Heinrich, R.; Ianconescu, R. Lighting Strike Analysis for Drones. In Proceedings of the 2017 IEEE International Conference on Microwaves; Antennas, Communications and Electronic Systems (COMCAS), Tel-Aviv, Israel, 13–15 November 2017. [Google Scholar]
- Rakov, V.A.; Uman, M.A. Lightning Physics and Effects; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Masłowski, G. Analiza i Modelowanie Wyładowań Atmosferycznych na Potrzeby Ochrony Przed Przepięciami; Monografia, Wydawnictwa AGH: Kraków, Poland, 2010. [Google Scholar]
- Horvath, T. Supposed Undistorted Original Distribution of Lightning Currents. In Proceedings of the 20th Interna-Tional Conference on Lightning Protection, Interlaken, Switzerland, 24–28 September 1990. [Google Scholar]
- Environmental Conditions and Test Procedures for Aircraft Systems, Wersja D, Rozdział 22 i 23; Washington, DC, USA, 2006.
- MIL-STD-461 F. Department of Defense Interface Standard Requirements for the Control of Electromagnetic Interference Characteristics of Subsystems and Equipment; Department of Defense: Washington, DC, USA, 2007. [Google Scholar]
- Aircraft Lightning Environment and Related Test Waveforms; Revision A; SAE International: Warrendale, PE, USA, 2005; Available online: https://www.sae.org/standards/content/arp5412a/ (accessed on 6 April 2021).
- Fisher, F.A.; Plumer, J.A.; Perala, R.A. Aircraft Lightning Protection Handbook, DOT/FAA/CT-89/22; September 1989; Available online: https://weatherguardaero.com/wp-content/uploads/2020/04/1989-DOTFAACT-8922.pdf (accessed on 6 April 2021).
- NO-16-A002:2006. Wojskowe Statki Powietrzne. Ochrona Przed Skutkami Wyładowania Atmosferycznego; Wymagania Ogólne; 2006. [Google Scholar]
- Filik, K. Badanie odporności zespołów awioniki statków powietrznych na narażenia LEMP. Prz. Elektrotech. 2014, 10, 60–63. [Google Scholar] [CrossRef]
- West, L. Allocating Indirect Lightning to Cables & Boxes at Program Inception. Application of Ohm’s Law, Kirchhoff’s Laws, Faraday’s Law & Scaling by Geometric, Electrical, & Spectral Parameters, Interaction Note 617. 2011. Available online: http://www.ece.unm.edu/summa/notes/In/IN617.pdf (accessed on 5 July 2021).
- Masłowski, G.; Rakov, V.A. New Insights into Lightning Return-Stroke Models with Specified Longitudinal Current Distribution. IEEE Trans. Electromagn. Compat. 2009, 51, 471–478. [Google Scholar] [CrossRef] [Green Version]
- Masłowski, G.; Rakov, V.A. Equivalency of lightning return stroke models employing lumped and distributed current sources. IEEE Trans. Electromagn. Compat. 2007, 49, 123–133. [Google Scholar] [CrossRef]
- Nucci, C.; Diendorfer, G.; Uman, M.; Rachidi, F.; Ianoz, M.; Mazzetti, C. Lightning Return Stroke Current Models with Specified Channel-Base Current: A Review and Comparison. J. Geophys. Res. 1990, 95, 20395–20408. [Google Scholar] [CrossRef]
- Heidler, F. Traveling Current Source Model for LEMP Calculations. In Proceedings of the 6th STEEC, Zurich, Switzerland, 1985; pp. 157–162. [Google Scholar]
- Chamayou, G. A Theory of the Drone; The New Press: New York, NY, USA, 2015. [Google Scholar]
- Quads for Fun. Available online: https://quadsforfun.wixsite.com/quadsforfun/typical-quad-circuit (accessed on 6 April 2021).
- Pittalà, F.; Stone, C.; Clark, D.; Kuschnerov, M.; Xie, C.; Haddad, A. Laboratory Measurements of SOP Transients due to Lightningstrikes on OPGW Cables. In Proceedings of the Optical Fiber Communication Conference, San Diego, CA, USA, 11–15 March 2018; Optical Society of America: Washington, DC, USA, 2018; p. M4B-5. [Google Scholar]
- Uglešíc, I.; Franc, B.; Stipetíc, N. Lightning Stroke Measurements, Data Verification and Application in Power Systems. In Proceedings of the VI Russian Conference on Lightning Protection, Saint Petersburg, Russia, 17–19 April 2018; pp. 1–22. [Google Scholar]
- Kossowski; Tomasz; Matuszewski, Ł. Non-Real-Time Wireless System for Lightning Effect Measurements. Appl. Sci. 2021, 11, 4204. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, G.; Chen, P. The probability prediction method of domino effect triggered by lightning in chemical tank farm. Process. Saf. Environ. Prot. 2018, 116, 106–114. [Google Scholar] [CrossRef]
- Tóth, Z.; Kiss, I.; Németh, B. Problems of the simulation and modeling the lightning protection of high structures. Pollack Period. 2019, 14, 223–234. [Google Scholar] [CrossRef]
- Visacro, S.; Soares, A., Jr.; Schroeder, M.A.O.; Cherchiglia, L.C.; de Sousa, V.J. Statistical analysis of lightning current parameters:Measurements at Morro do Cachimbo station. J. Geophys. Res. Atmos. 2004, 109. [Google Scholar] [CrossRef]
- Trkulja, B.; Drandíc, A.; Milardíc, V.; Župan, T.; Žiger, I.; Filipovíc-Grˇcíc, D. Lightning impulse voltage distribution over voltagetransformer windings—Simulation and measurement. Electr. Power Syst. Res. 2017, 147, 185–191. [Google Scholar] [CrossRef]
- Prácser, E.; Bozóki, T.; Sátori, G.; Williams, E.; Guha, A.; Yu, H. Reconstruction of global lightning activity based on Schumannresonance measurements: Model description and synthetic tests. Radio Sci. 2019, 54, 254–267. [Google Scholar] [CrossRef]
- CALCULLA. Available online: https://calculla.pl/ (accessed on 6 April 2021).
- Otto, B. Linear Algebra with Applications, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Stephen, S.M. Gauss and the Invention of Least Squares. Ann. Stat. 1981, 9, 465–474. [Google Scholar] [CrossRef]
- Tomasz, K.; Szczupak, P. Analysis of the influence of strong magnetic field on unmanned aircrafts, using Helmholtz coil. Prz. Elektrotech. 2020, 96. [Google Scholar] [CrossRef]
- Tomasz, K.; Filik, K. Lightning tests of unmanned aircrafts with impulse generator. Prz. Elektrotech. 2020, 96, 67–70. [Google Scholar]
- Sehrawat, A.; Choudhury, T.A.; Raj, G. Surveillance Drone for Disaster Management and Military Security. In Proceedings of the IEEE 2017 International Conference on Computing, Communication and Automation (ICCCA), Greater Noida, India, 5–6 May 2017. [Google Scholar]
- Bartlett, E. Drone vs. Lightning, The University of Manchester. 2017. Available online: http://www.mub.eps.manchester.ac.uk/scienceengineering/2017/04/10/drone-vs-lightning/ (accessed on 6 April 2021).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| I01 [kA] | I02 [kA] | τ11 [ms] | τ12 [ms] | τ21 [ms] | τ22 [ms] | n1 | n2 |
|---|---|---|---|---|---|---|---|
| 10.7 | 6.5 | 0.25 | 2.1 | 2.5 | 230 | 2 | 2 |
| Input | Output | Transmittance | Determination |
|---|---|---|---|
| Pins A and B first motor coil | Pins A and B other motor coil | 1.358 × 10−7 x4 − 9.25 × 10−5 x3 + 2 × 10−2 x2 − 1.8 x + 59 | 72% |
| Pins A and B first motor coil | Engine control unit | 4.8 × 10−8 x4 − 5.8 × 10−6 x3 + 2.47 × 10−3 x2 − 0.42 x + 28.62 | 72% |
| Pins A and B first motor coil | GPS module | 1.82 × 10−8 x4 − 1.58 × 10−5 x3 + 4.75 × 10−3 x2 − 0.5768 x + 28.96 | 79% |
| RF antenna | Power supply terminals | −3.37 × 10−6 x3 + 1.86 × 10−3 x2 − 0.33 x + 26.3 | 55% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szczupak, P.; Kossowski, T. Response of Drone Electronic Systems to a Standardized Lightning Pulse. Energies 2021, 14, 6547. https://doi.org/10.3390/en14206547
Szczupak P, Kossowski T. Response of Drone Electronic Systems to a Standardized Lightning Pulse. Energies. 2021; 14(20):6547. https://doi.org/10.3390/en14206547
Chicago/Turabian StyleSzczupak, Paweł, and Tomasz Kossowski. 2021. "Response of Drone Electronic Systems to a Standardized Lightning Pulse" Energies 14, no. 20: 6547. https://doi.org/10.3390/en14206547