1. Introduction
Unmanned Aerial Vehicles (UAVs) are increasingly used in everyday life. The scope of their work is constantly enlarged from casual filming [
1] to advanced military use [
2]. UAVs are used for distributing shipments, mapping, surveillance, and monitoring borders or crops [
3,
4]. The limited duration of the UAV flight causes the necessity to land and the resulting loss of time in terms of interrupting the mission, charging or replacing the batteries. Designers of UAVs are looking for opportunities to obtain energy from outside; if this is achieved, the time of flight will be extended [
5]. The goal is to achieve full energy autonomy. The energy autonomy of UAVs is an important direction in the field of aerospace because, in addition to the possibility of continuous operation, another advantage is the lower cost of this kind of application in comparison to using a satellite. One of the most used sources is a solar cell [
4,
5].
Solar-powered UAVs are not a new concept of aerial vehicles. We can distinguish many types of solar-powered UAVs, for example: Atlantic Solar [
5,
6], Solar Impulse 2 [
7], Airbus zephyr [
8], PHASA-35 [
9], and Odysseus [
10]. Each of these aircrafts is based on a lightweight composite structure and is equipped with photovoltaic (PV) panels. Depending on the purpose of the UAV, the payload aspect, as well as the weight of the measuring, detection, and control devices should be taken into account. A UAV’s weight should be as low as possible. The load-bearing structure then enables a larger payload or an increase in the capacity of the batteries, which allows for an extension in the applications of the UAV [
3,
5].
The possibility of obtaining electricity from solar cells makes them the main substitute or complementary source of energy [
11]. The use of PV panels can be found in small devices, such as lights or toys, on the roofs of houses to provide partial electricity to houses, or in a large area of desert, lake or farmland where they play the role of new power plants [
11,
12]. The ease of generating electricity, the relatively low cost of such a power supply system, and the newer materials of solar cells have seen them gain recognition in new technology industries.
There are a number of different technologies are used for manufacturing solar cells with different materials that are used in various industries [
4]. The most commonly used material for solar cells is silicon. Other materials used for the construction of photovoltaic cells are gallium arsenide, cadmium telluride, and copper indium gallium selenide. However, this technology is restricted by the scarcity of the required materials. The most popular silicon PV panels are rigid and breakable [
13,
14]. These kinds of solar cells are not resistant to working under stresses where forces act on the PV panel. The wings, fuselages, tail are curved surfaces. This makes it impossible to fit the silicon solar cell into the construction of the UAV. For UAVs, aerospace, and aviation, we have to take into account flexible solar cells, which are able to bend and are more durable than standard silicon solar cells [
15,
16]. Under the influence of stresses and forces during operation, the PV panel will not break and will still be able to produce electricity. In this group, we can distinguish several types of solar cells that could be used in the aviation industry. The most popular is the GaAs (Gallium arsenide) solar cell, which provides the highest efficiency, exceeding 30% [
4,
17]. The disadvantage of GaAs is the high cost, meaning designers often cannot afford to build a prototype. GaAs is used primarily in the space industry as probes, satellites and in the military industry due to their flexibility, efficiency and weight. Another kind of solar cell that can be used in aviation is flexible silicon solar cells [
18]. This kind of PV panel provides an efficiency of around 25%, at a much lower cost compared to GaAs. A DSSC (Dye-sensitized solar cell) is a type of solar cell that has different properties than the previous two types [
19]. Their maximum efficiency is around 13%, but they make up for this with long service life, low production costs, high resistance to mechanical damage, and a wide-angle range of sunlight [
19,
20]. In addition to low efficiency, another is its poor resistance to operation at low and high temperatures [
19,
20].
To strengthen solar cells mounted on the UAV structure and to prevent mechanical damage, various protective coatings are used on their upper surface, e.g., films and resins to extend the service life of the system. Solar cells can be mounted to the wing via several types of technology [
21]:
Adhering to the existing wing—this method is good for the retrofit of existing UAVs. The advantage is the possibility of replacement in case of damage. The disadvantage of this solution is sealing the gap between the two modules [
21,
22].
Solar modules into the mold—this method is good for new UAVs. Solar cells are a direct part of the wing. The advantage is its easy to arrange wiring, however, the PV modules cannot be swapped in case of damage.
Solar modules as wing surface—PV panels are used as the upper surface of the wings. The advantage is its easy to arrange wiring, however, it requires additional ribs inside the structure of the wing to strengthen the structure of the UAV [
8,
23,
24,
25].
UAV’s power supply system can be built using many different storage sources. The current predominant battery energy storage technology for UAVs is the Li-ion battery [
3,
5,
22,
24]. The type of battery cell should take into account temperature range, lifespan, energy density, safety, and performance. Another issue is the shape of the battery cell. We can distinguish three main shapes of battery cells: prismatic, cylindrical, and pouch [
26,
27]. The cylindrical cell has good mechanical strength, specific energy, and energy density. The disadvantage of the cylindrical cell is its bad heat management. The prismatic cell has good mechanical strength, heat management, specific energy, and energy density but they have a heavy shell, which leads to certain restrictions on the energy density of the battery pack. Pouch cells have good heat management, energy density, and specific energy. The disadvantage is its low mechanical strength [
26,
27].
To provide solar cells and battery cells that are fully functional, the power supply system should be equipped with MPPT (Maximum Power Point Tracking) and a BMS (Battery Management System). MPPT ensures the continuous supply of the maximum power generated by the PV [
28]. A photovoltaic module has non-linear I–V (current–voltage) characteristics and its P–V (power–voltage) characteristics show that it possesses only one point (P
mpp). This point also varies with the change in insolation and temperature. MPPT is used to maximize the value of the solar energy produced by the PV module. BMS is responsible for the proper work of the batteries. The BMS controls the charging and discharging currents, the uniform voltage of cells, and the overall temperature of the system [
29].
As part of the research work, a team of scientists and designers developed and built a family of UAVs called TwinStratos (TS), which are suitable for continuous flight missions.
As part of this work, several scale-up units have been built so far and are intended to be built for the testing and verification of individual subsystems, as well as for the implementation of planned research missions.
TwinStratos 110 (TS110) scaled 1:10—UAV for testing general layout and specific simplified control system;
TS17 scaled 1:7—UAV for testing the power supply system, energy consumption simulation model, and technology of manufacturing;
TS12 scaled 1:2—UAV for long endurance tests, verification flight parameters and performance ranges in operation mode, designated for service use and research tests;
TS—target UAV intended for the research and implementation of commercial services.
The correct selection of solar cells, batteries, energy converters and energy management devices with the simultaneous use of energy-saving propulsion systems should enable the long-endurance flight of the UAV [
5,
6,
30]. The aim of this article is to illustrate the complexity of the issues of a solar-powered UAV. The simulation model developed as part of this work was used to verify whether the aircraft is able to fly over 24 h under the given conditions. In this research, the Model-Based Design (MBD) methodology was used. The approach is characterized by placing the simulation models of the analyzed system in the center of the development process. Using MBD is beneficial, particularly in designing dynamic and complex systems, as it allows for a better understanding and reduction of the complexity of UAVs [
31,
32]. Additionally, the MBD allows us to design and optimize the technical parameters, work more efficiently in designing systems and ease cooperation between specialists in different fields [
33]. Such an integrated design approach based on the MBD methodology was developed by the project team and applied to the design and testing of ultra-efficient racing vehicles [
34], Automated Guided Vehicles AGVs [
33], as well as for the design of General Aviation class aircraft [
35].
3. Materials and Methods—Numerical Model Data
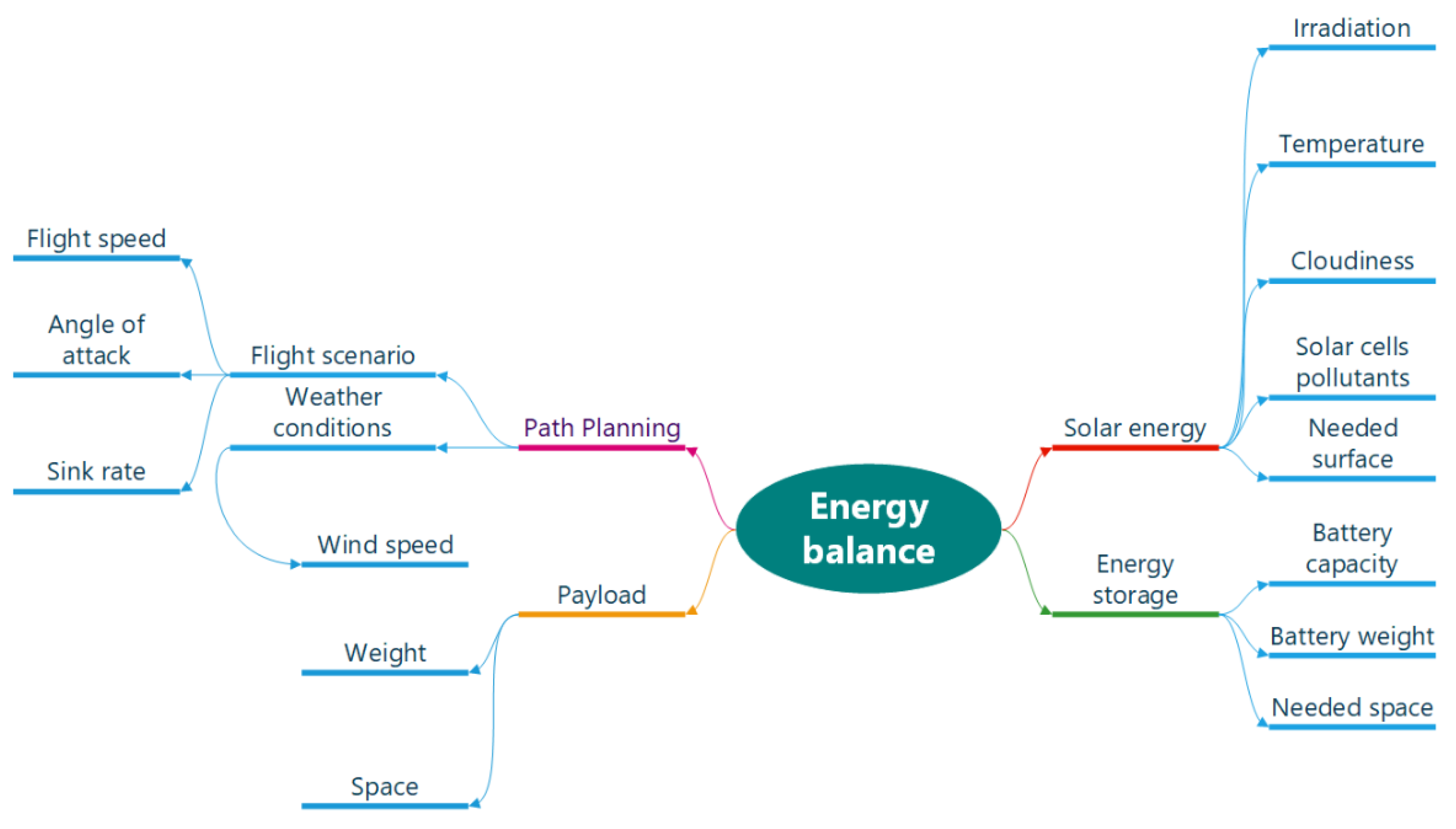
The factors that were presented in the previous section are the first group of the numerical model. These data can help us to calculate the energy balance, but we have no influence on these variables. The second group is directly related to the power supply system components; namely, the solar cells and battery cells. We can freely change these elements and modify their connections in such a way as to obtain an energy surplus that allows for a continuous UAV flight of at least 24 h.
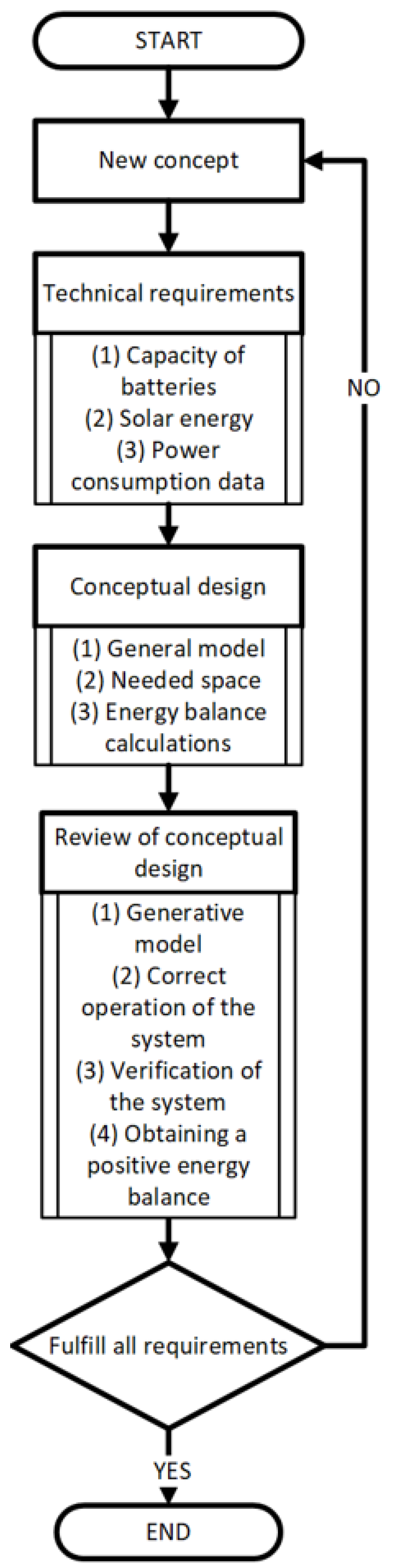
To provide a flight for 24 h we have to take into account both the outside data (e.g., weather) and the inside data (e.g., battery capacity, UAV design, solar cells). All of the requirements should be fulfilled to allow us to complete the planned flight scenario. The process of carrying out the concept selection is presented in
Figure 4.
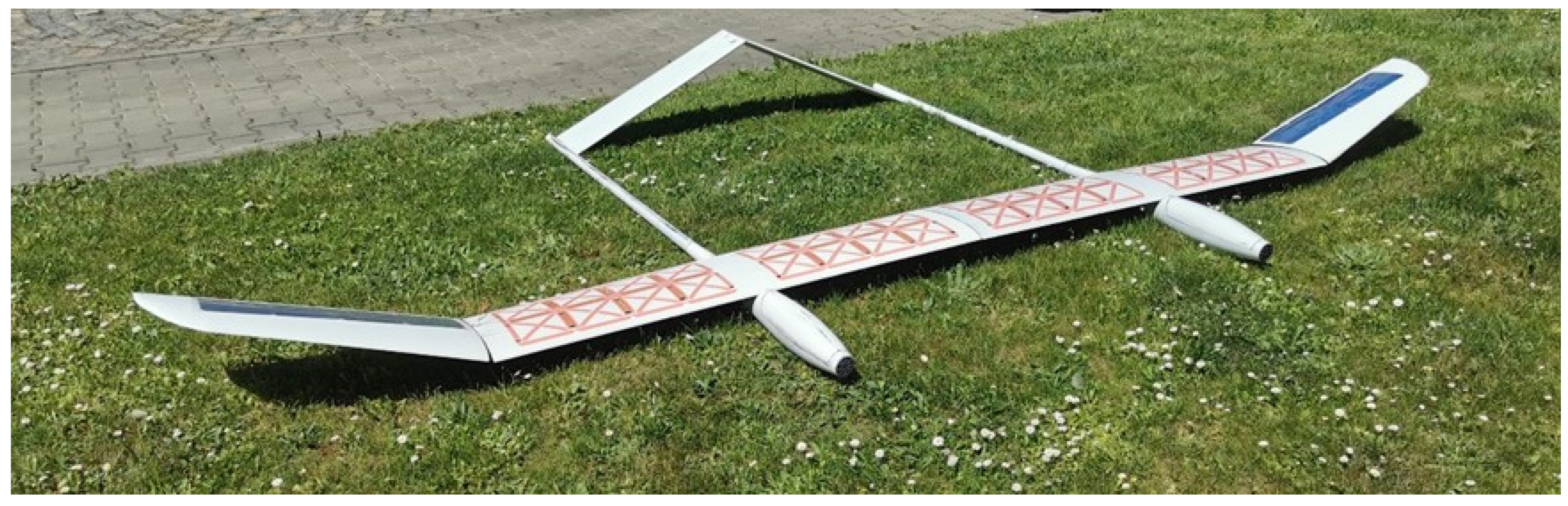
To verify the numerical model, we took into account two types of TwinStratos: TS17 (
Figure 5) and TS12. The parameters of both UAVs are given in
Table 2, below:
3.1. Power Consumption
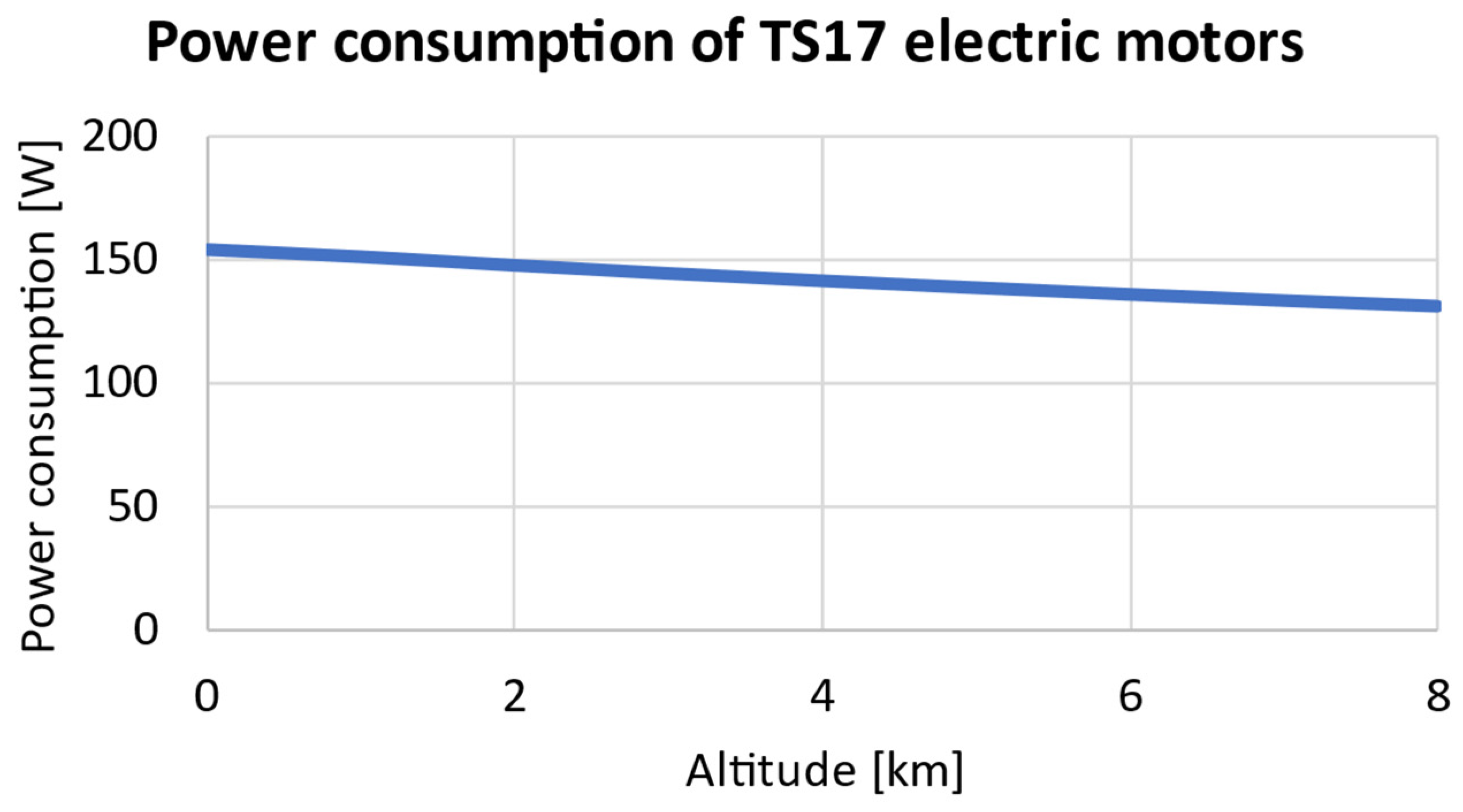
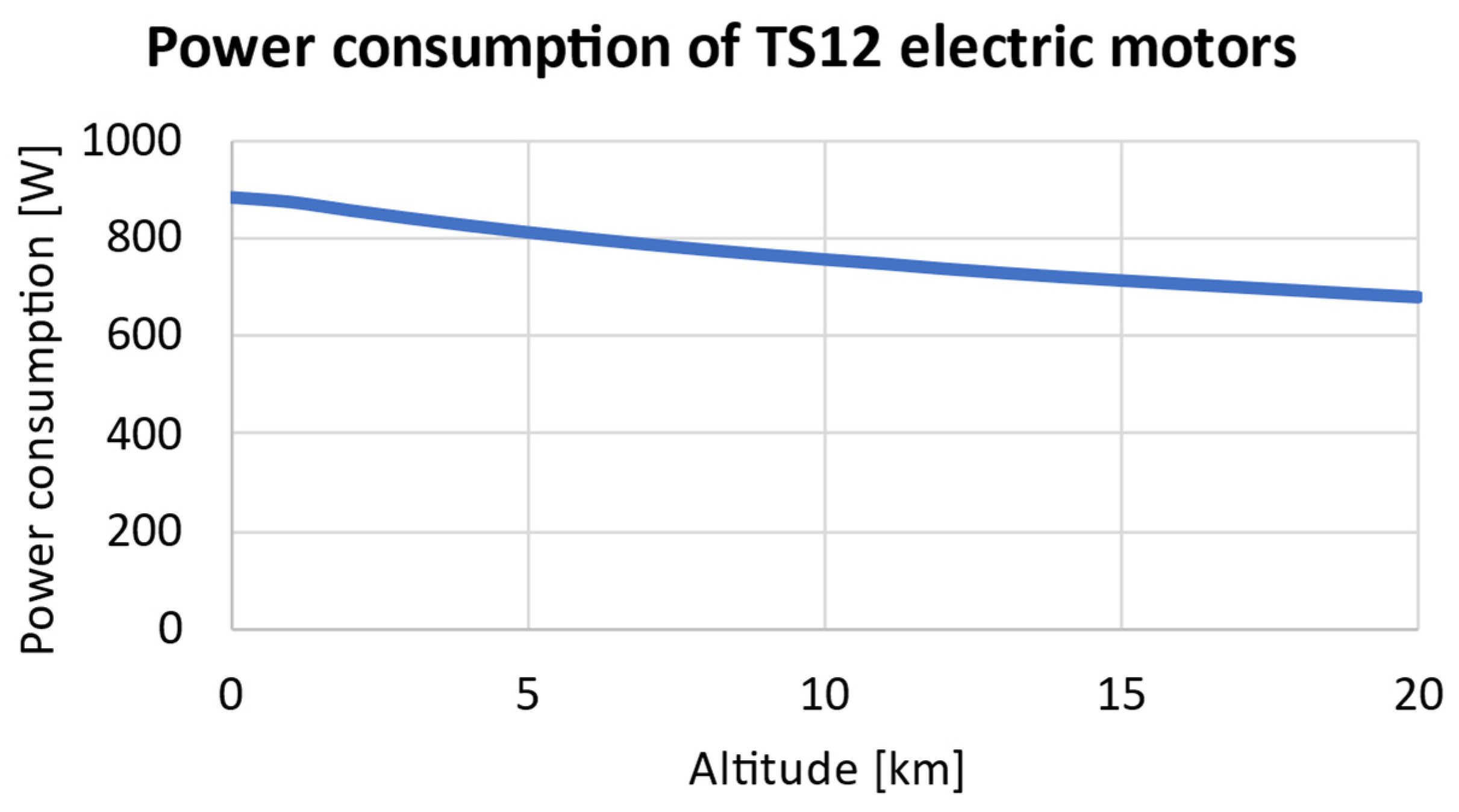
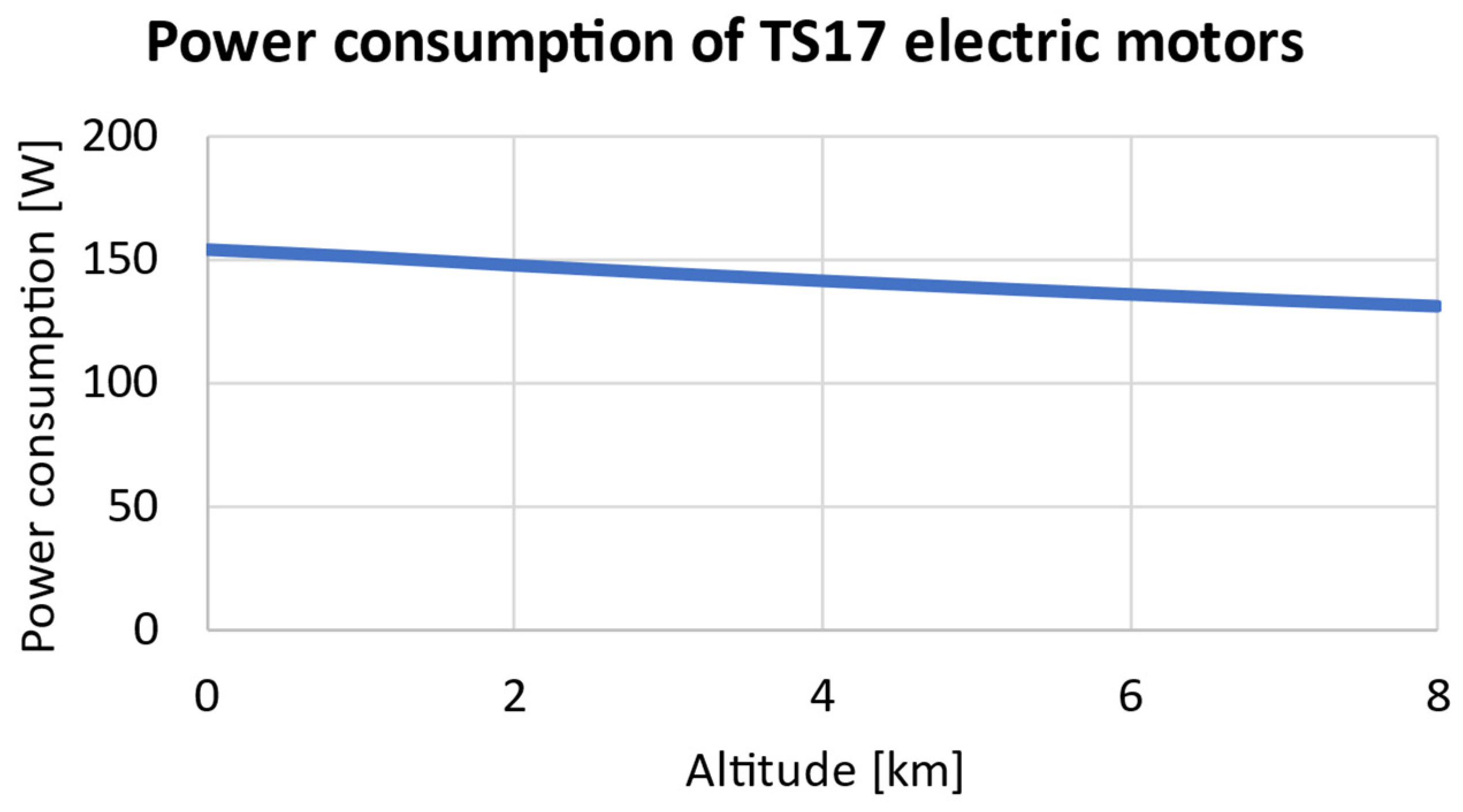
The UAV requires energy for its propulsion and additional systems, e.g., navigation, control, safety, measurement. Electric motors consume the majority of the energy. This value range can be wide due to the operational state of the flight. Take-off and climbing consume the most energy during flight at this same height and descent lower. During gliding, the electric motors do not consume energy; therefore, this stage of flight can be used as an energy buffer.
When the power consumption of the motors is variable, for the peripheral devices (control, navigation), we can use a constant value as the power consumption. The power consumption of the system on the UAV board is difficult to define. Due to the low percentage of the whole energy consumption, we can take into account the maximum value of the power consumption of the additional systems. In our case, this value is equal to 20 W for TS17 and 50 W for TS12. To assess the energy consumption of the analyzed UAVs, we used the simulation model developed in our previous study on the potential of General Aviation electric aircrafts, which is widely described [
35]. Due to the higher altitudes reached by the UAVs, the COESA Atmosphere Model block responsible for calculating the changes in the atmospheric parameters was replaced by the ISA Atmosphere Model block. The model uses a backward approach. This approach allows us to assess the energy demand in order to perform the movement of the vehicle with the predefined parameters and it does not require control. Additionally, this approach performs calculations faster than the forward approach [
49].
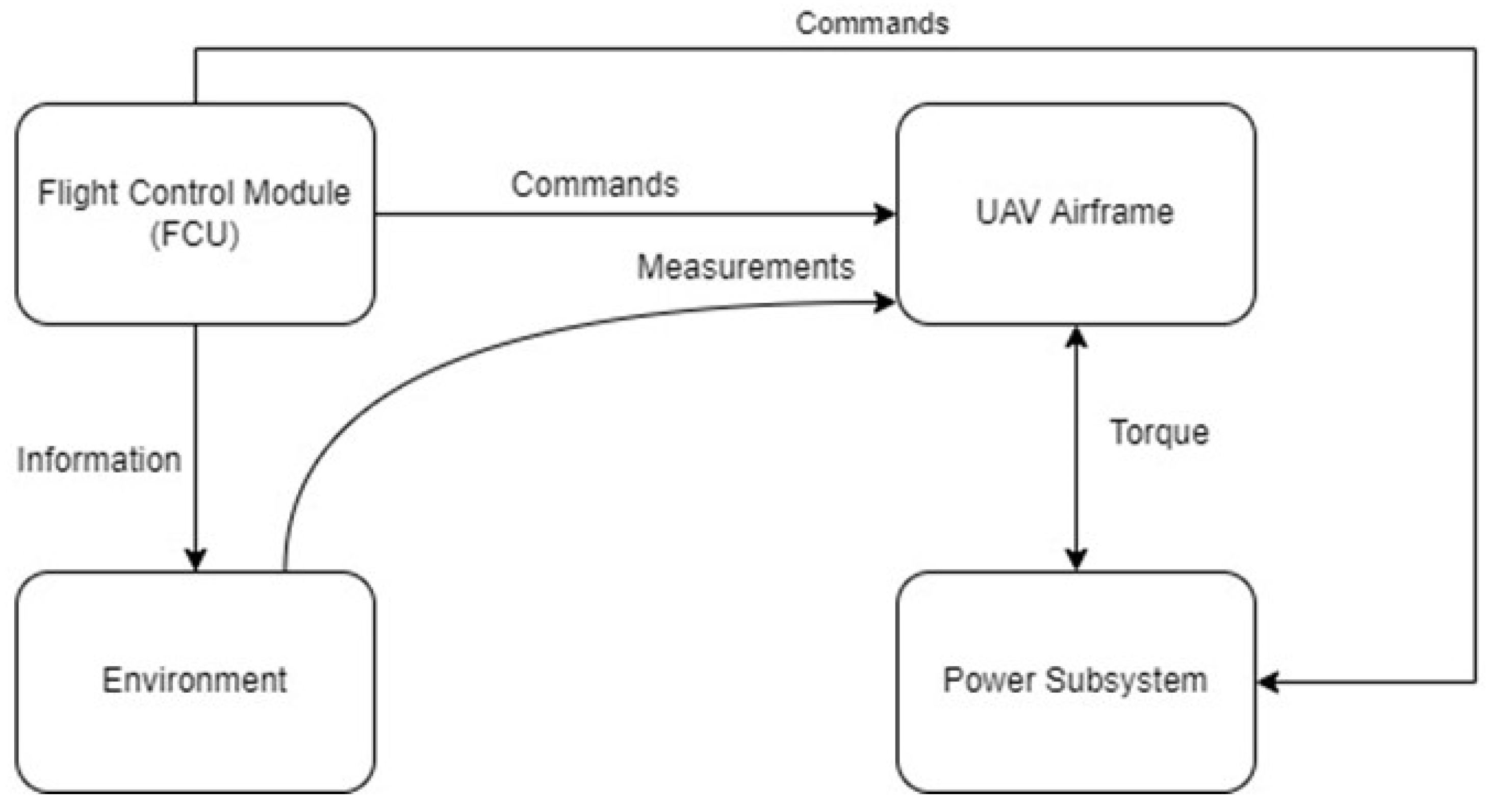
The model consists of the following subsystems, which are responsible for different calculations and behavior simulations (
Figure 6):
Flight Control Module (FCM): controls the UAV and carries out the prepared mission scenario;
Environment: calculates the changes in the atmospheric parameters due to changes in the UAV altitude;
Airframe: calculates, based on the information from Flight Control Module and Environment, the required torque and energy demand of the UAV to fly with the given parameters;
Power Subsystem: consists of the following subsystems: Battery, Electric Motor and Loads, which are responsible for simulating the power demand for avionics.
The model’s working principle can be described as follows: the Flight Control Module passes the information regarding the changes in the UAV altitude to the Environment to calculate the changes in the atmospheric parameters. Then, these subsystems send the flight and atmospheric parameters to the Airframe, which, after calculating the torque demand, “forces” the electric motor to produce the ordered value, which affects the battery power consumption.
In our simulation model, we used the following simplifications:
The electric motor runs on a direct current;
The flight takes place in nonthermal and nonwind conditions;
The battery operation is not affected by the temperature;
The UAV is considered to be a mass point;
The UAV is not equipped with solar cells.
In the case of the last simplification, the task of this model is only to assess the energy demand of the UAV, not its flight performance (e.g., range).
3.2. Power Supply System Elements
3.2.1. Solar Cells
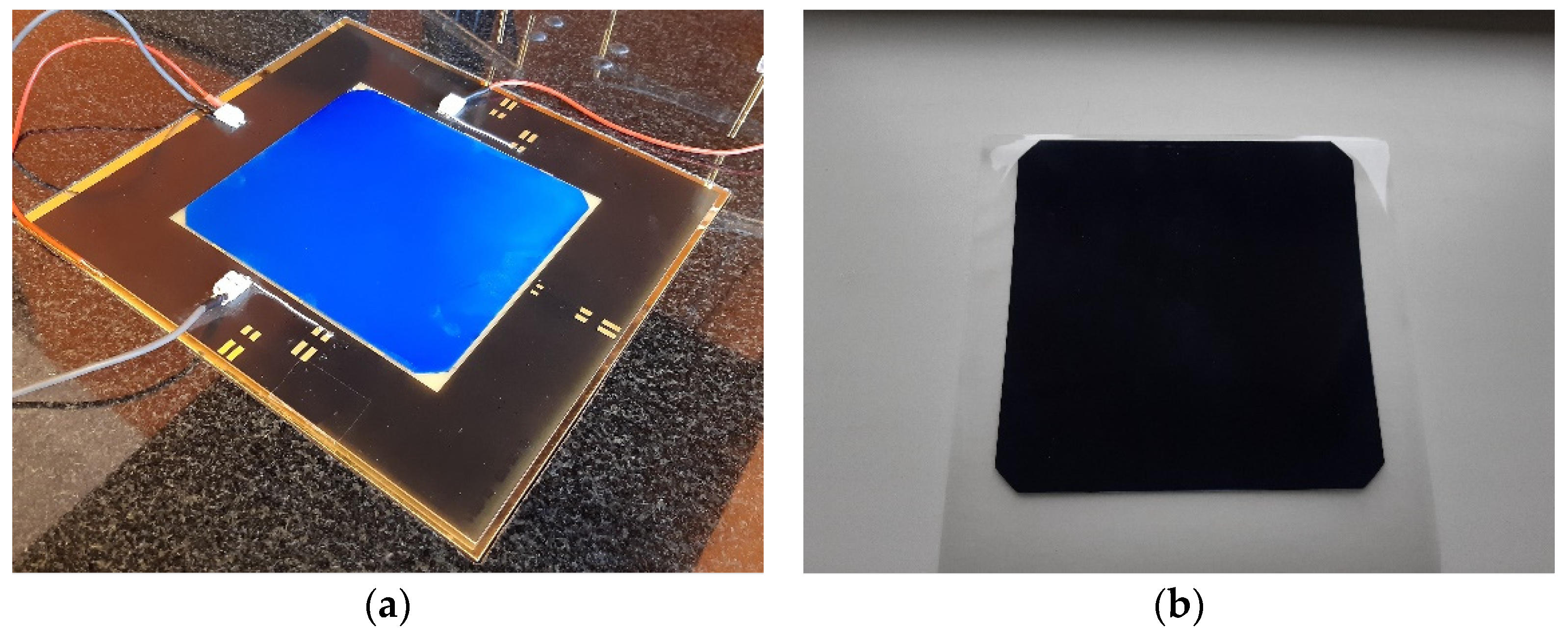
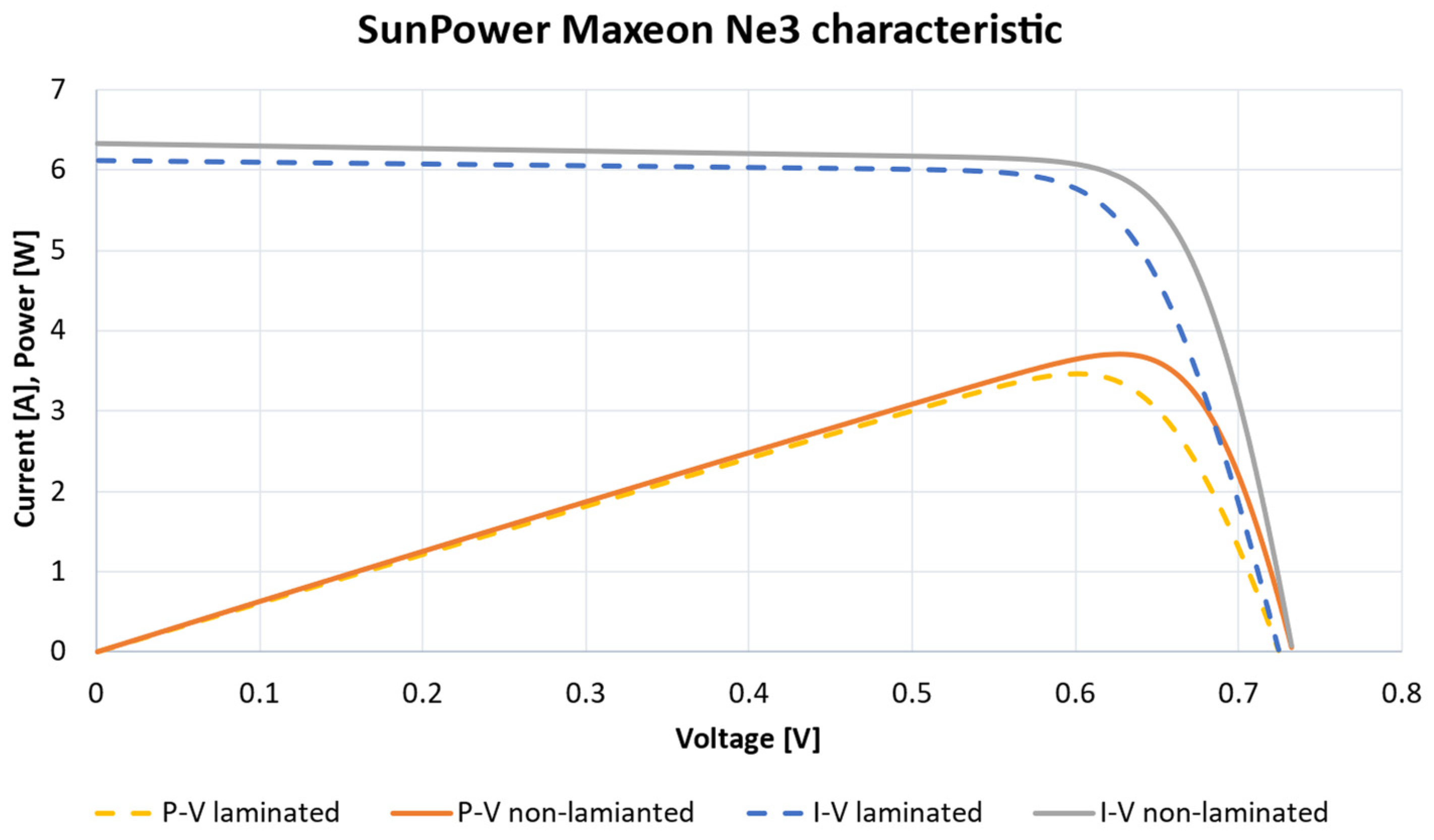
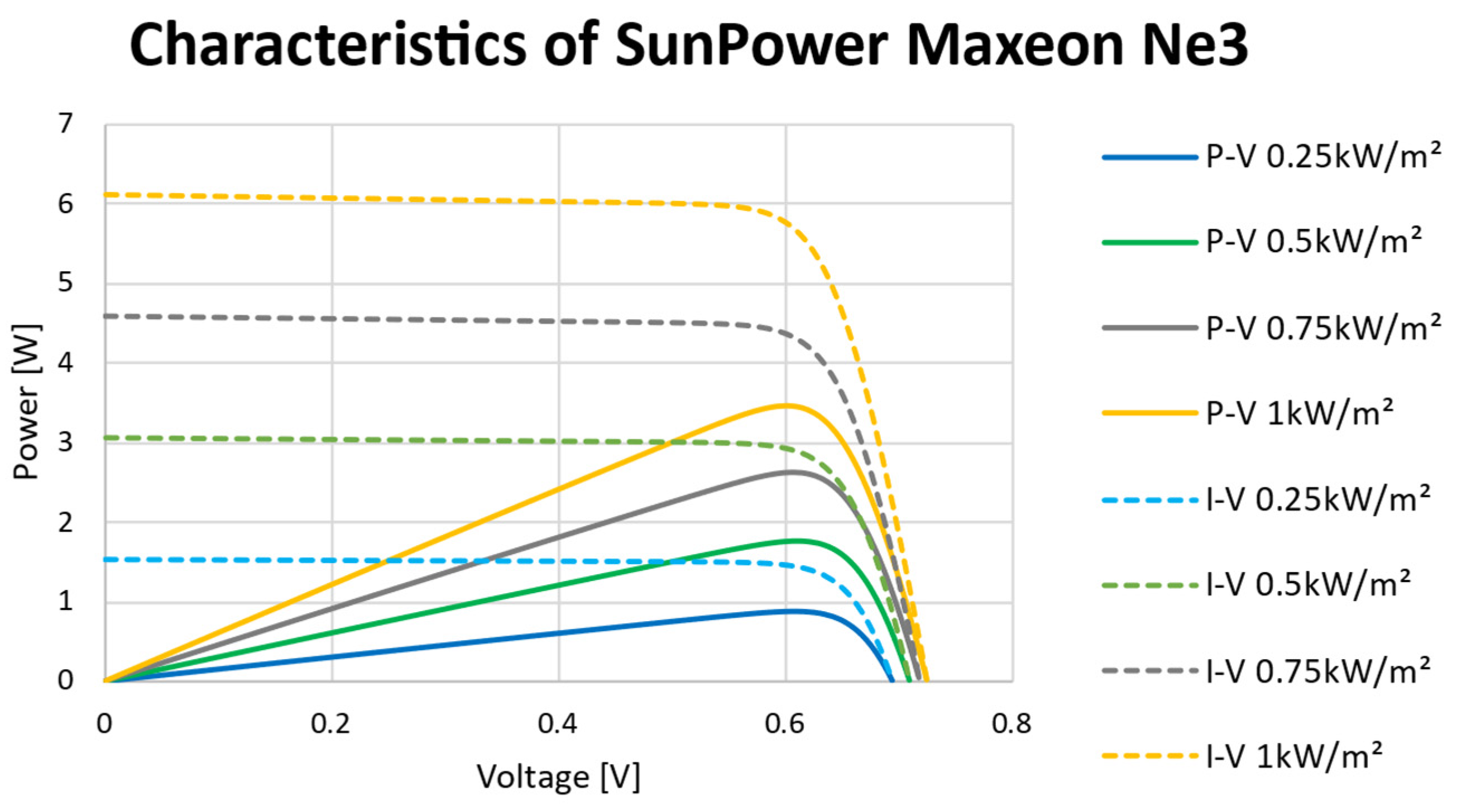
As a base for our UAV, we decided to use flexible SunPower Maxeon Ne3 solar cells [
50]. The manufacturer ensures that the efficiency of this solar cell is over 24.34% and the generated power is around 3.77 W. To check if the parameters included in the datasheet are reliable, we decided to check the current-voltage (I-V) and power-voltage (P-V) characteristics on the test stand. The tests were carried out both for the non-laminated solar cells and for the solar cells laminated with 100 μm PVC (Polyvinyl Chloride) film (
Figure 7). Lamination decreases the efficiency of the solar cell but this coating increases its durability and resistance to the mechanical damage that may occur during UAV flight [
51].
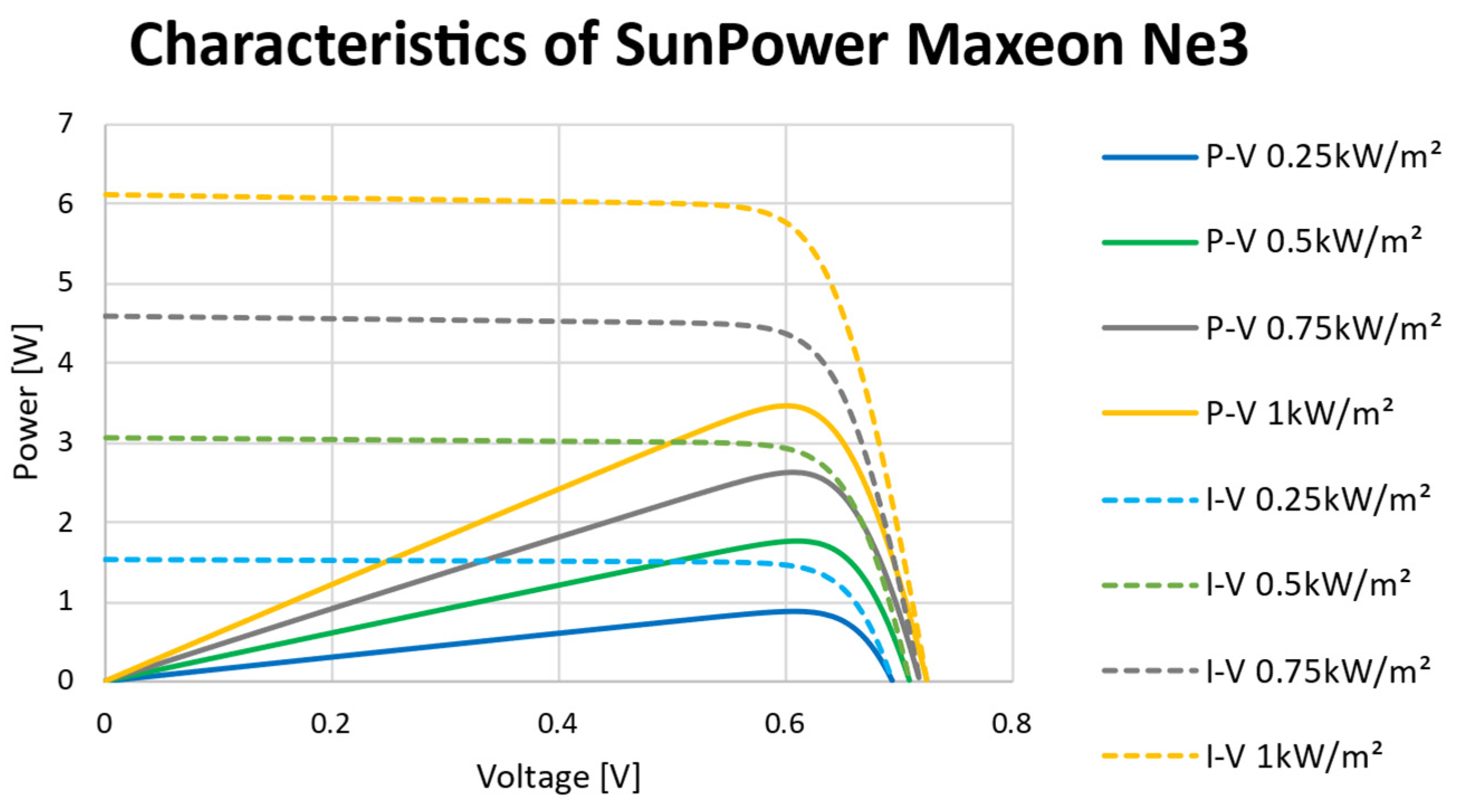
The test stand allows us to test solar cells in the STC (Standard Test Conditions): irradiate with the power 1000 W/m
2 in the temperature 25 °C, and Air mass 1.5 spectrum (AM 1.5) defined by European standard IEC 60904-3 [
52]. The system for the I-V characteristic measurements of the solar cells meets all of the requirements of the IEC 60904-1 standard [
53].
On the wings of the TS17, we could place a maximum of 40 pcs solar cells and, on the TS12, 350 pcs. The exact type of solar cell connection also took into account the nominal voltage of the battery and the voltage range of the MPPT converters. We decided to use a connection 40S1P for TS17, and 70S5P for TS12. In a parallel connection, the disadvantage is that, in case of damaging a single solar cell and lowering the current value, the whole chain will generate this low current. By increasing the number of parallel connections, we increased the redundancy of the system, and in the event of a single cell failure, we increased the value of the generated energy.
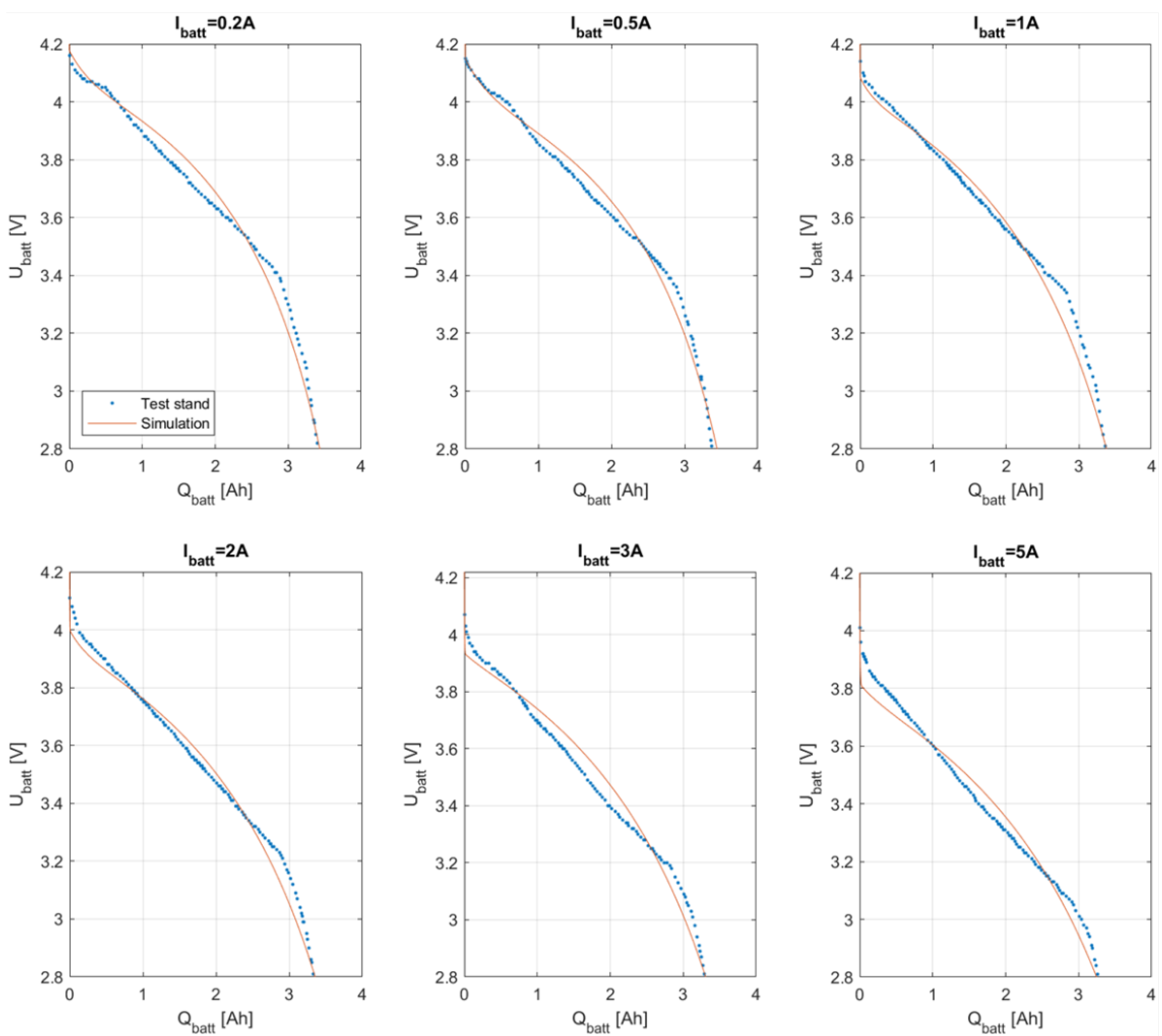
3.2.2. Battery Cells
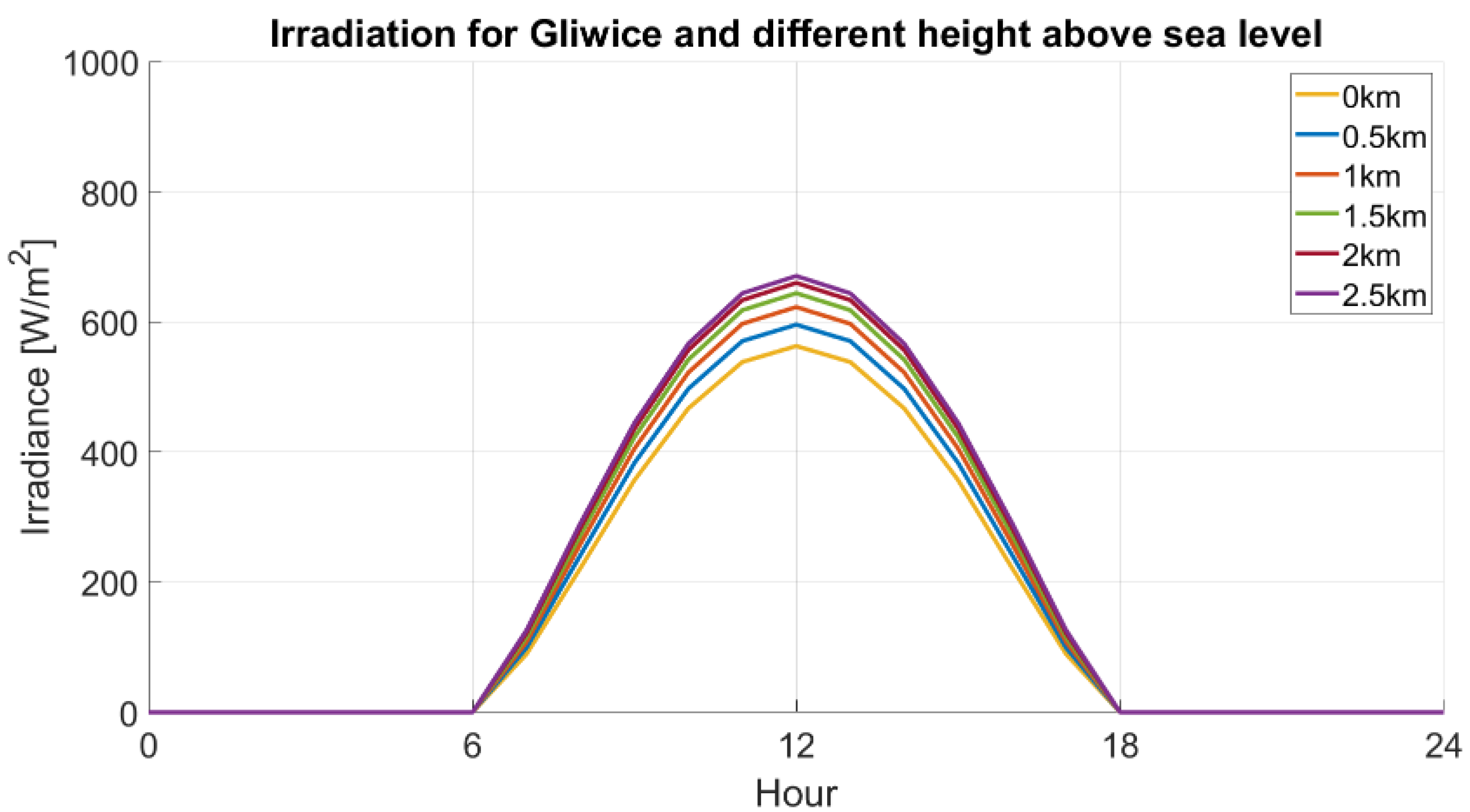
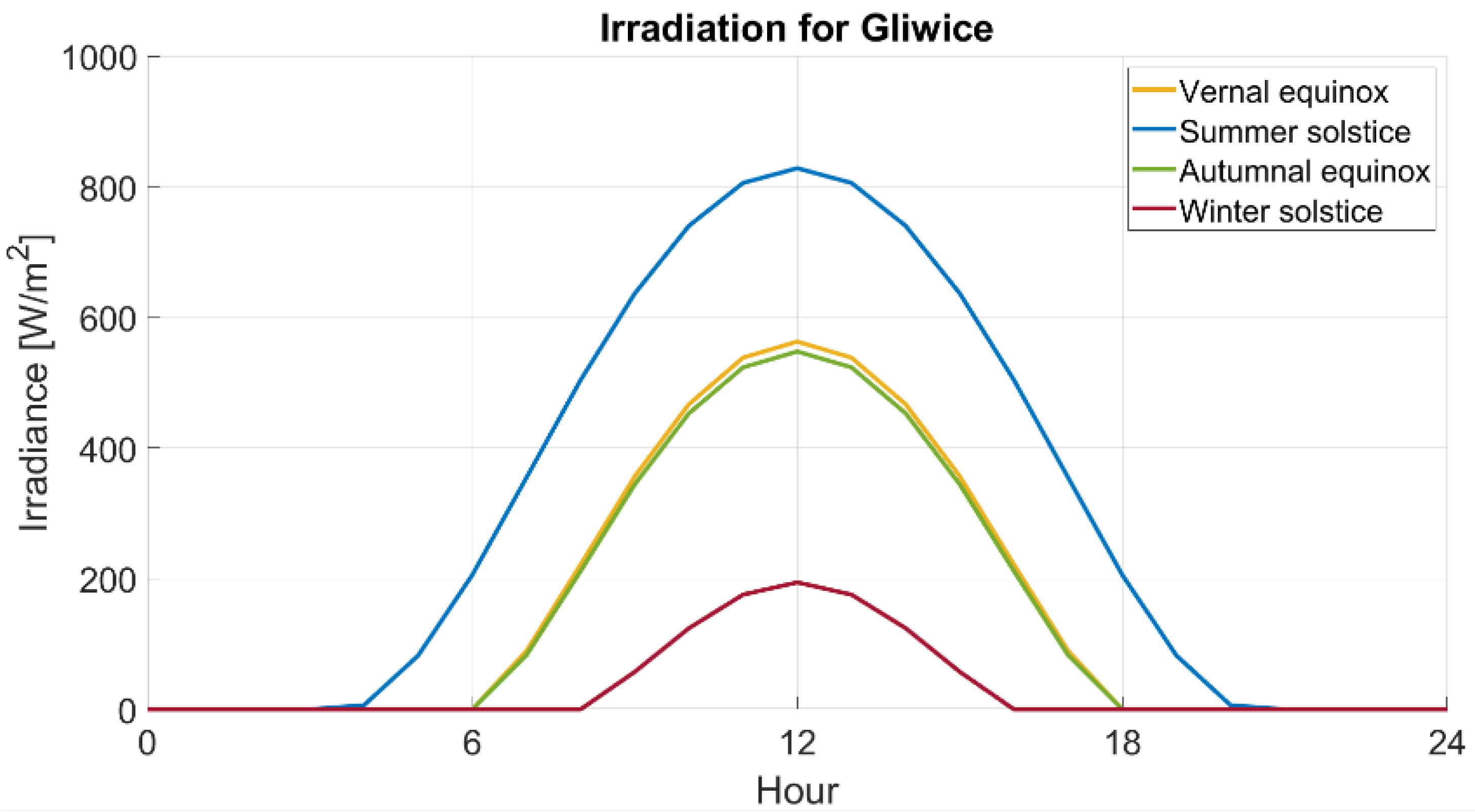
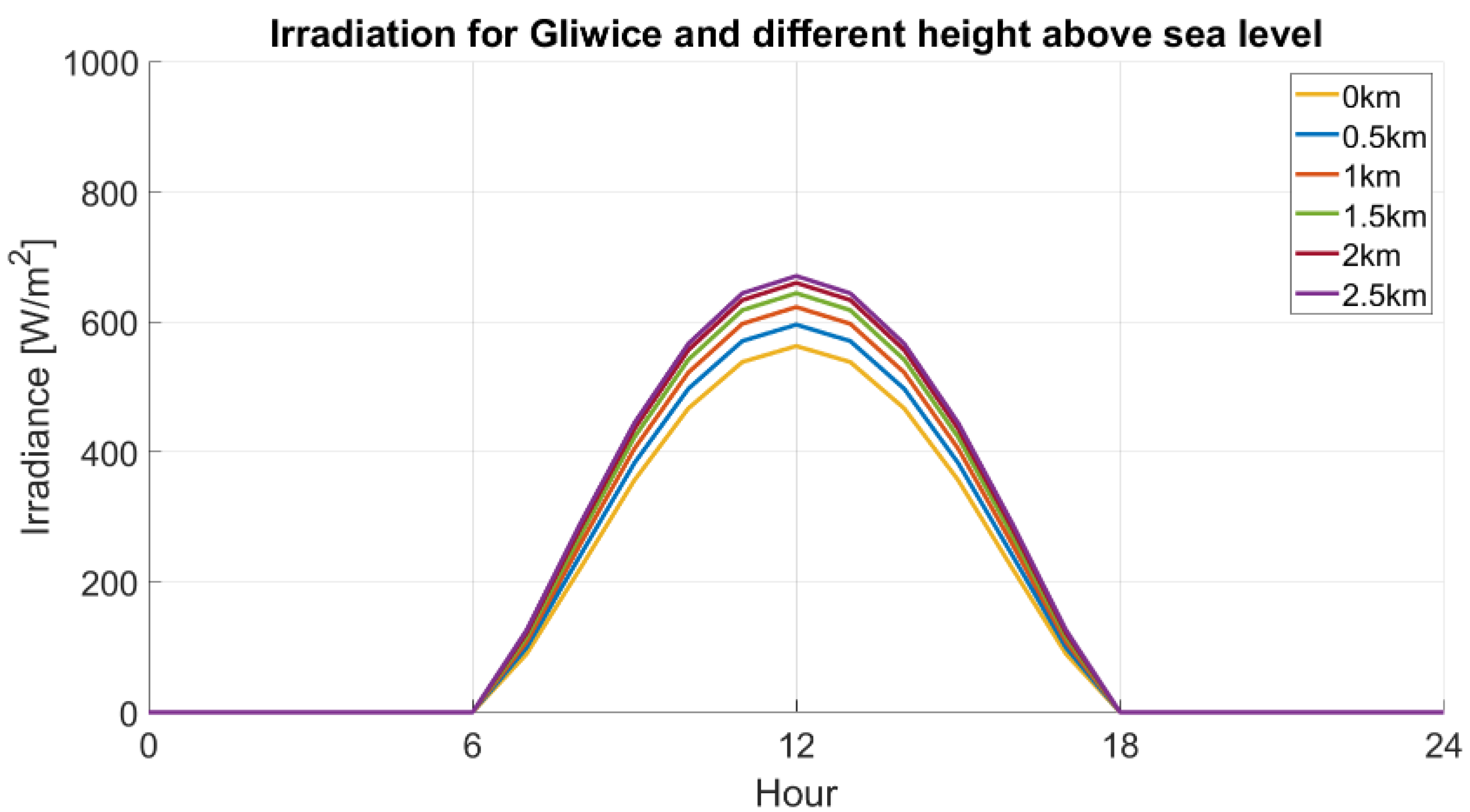
The battery was selected in such a way as to best meet the following criteria: the lowest possible weight with the highest possible specific energy and energy density. The initial parameters of the power supply system were determined on the basis of simplified analytical calculations. Taking into account the number of solar cells and the energy that can be obtained, the capacity of the battery was calculated. We chose Gliwice as the location for the calculation. The vernal equinox was used for the irradiation equations.
For TS17 and TS12, we decided to use this same battery cell: Samsung INR18650-35E (
Figure 8). The chosen battery cell generates 3.7 V, with a capacity of 3.5 Ah. The weight is equal to 50 g. As the connection, we used 4S12P for TS17 and 12S18P for TS12. A wide range of operating temperatures is essential in case of wide varying temperatures during flight. The Samsung INR18650-35E continues to work, even at −20 °C. The storage system was designed in such a way as to provide battery heating for long flights at high altitudes and at low temperatures. The heater starts to heat up the battery pack space if the temperature drops below the set level.
3.3. Simulation Model
A simulation model of the TwinStratos power supply system was prepared analogically, similar to the general diagram in
Figure 2 (
Figure 9). The main goal of the simulation model is to obtain the output data, such as the energy from the PV, the SoC (State of Charge), and time to discharge. Simulation allows us to check whether the given parameters in the adopted scenario will be feasible.
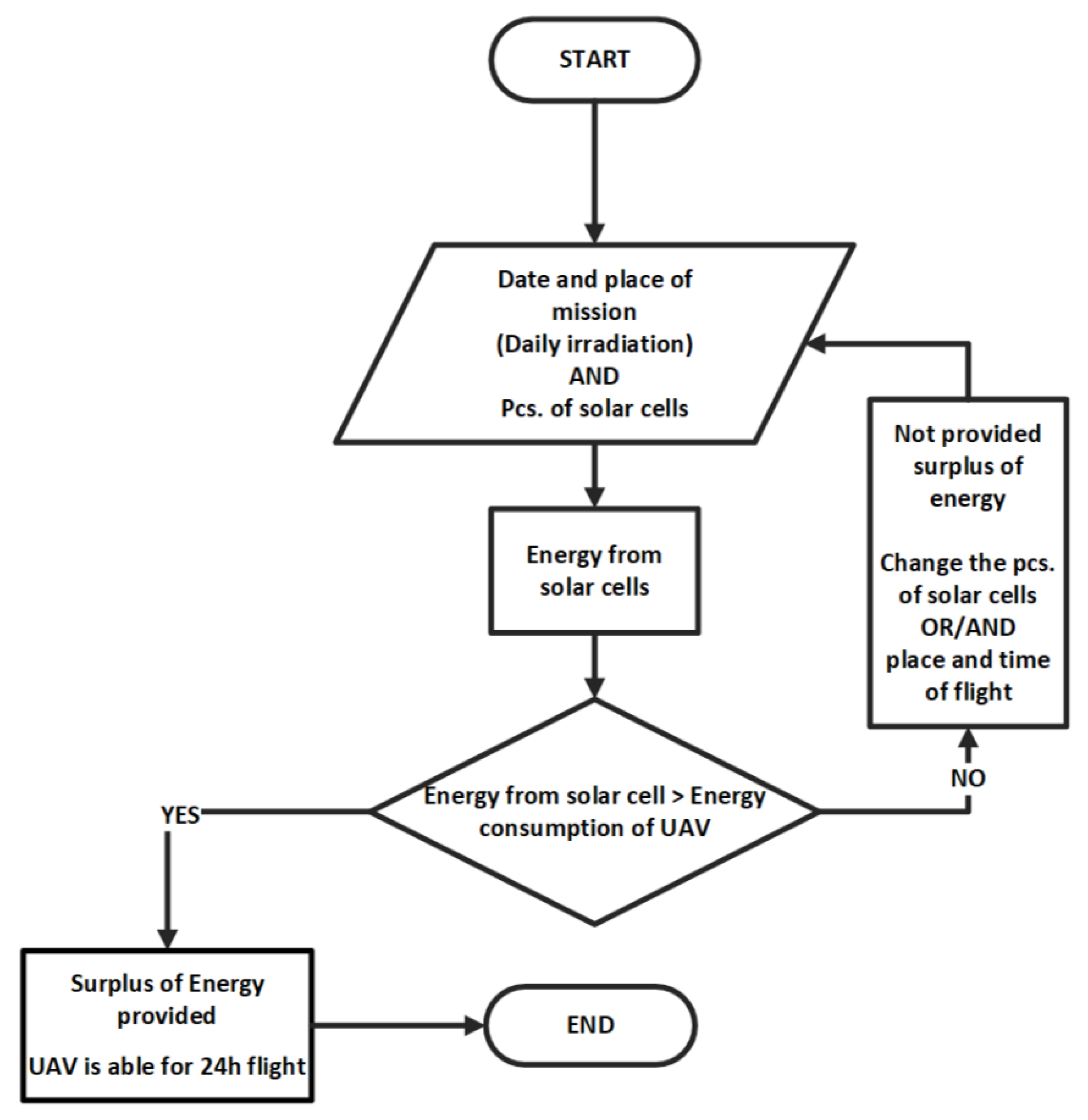
The scenarios that took into consideration time and location were either able or not able to achieve a 24 h flight. The flow chart (
Figure 10) shows the change procedure for achieving a 24 h flight.
3.4. Scenarios of Path of Flight
To develop the UAV flight scenarios, we took into account the basic operations: take-off, climbing, gliding. The scenario helps to define the UAV energy demand so that it is possible to determine the power needed for each stage of flight. In the simulation model, we decided to prepare two main flight scenarios. Flight paths allow us to optimize the power consumption during the flight and increase the working time of the power supply system. The properly prepared scenarios for the UAV, in combination with the properly selected solar cells, batteries, and power consumption devices, allow for obtaining long endurance, which should ultimately achieve full energy autonomy of the UAV. The flight planning paths are mainly based on reaching the set altitude and then, depending on the needs, we can start the gliding or supporting the flight at a certain altitude. The goal of the simulation is to achieve a milestone in the form of a flight over 24 h. All of the scenarios were developed to take-off at sunrise. The single scenario is 24 h and it repeats every day thereafter.
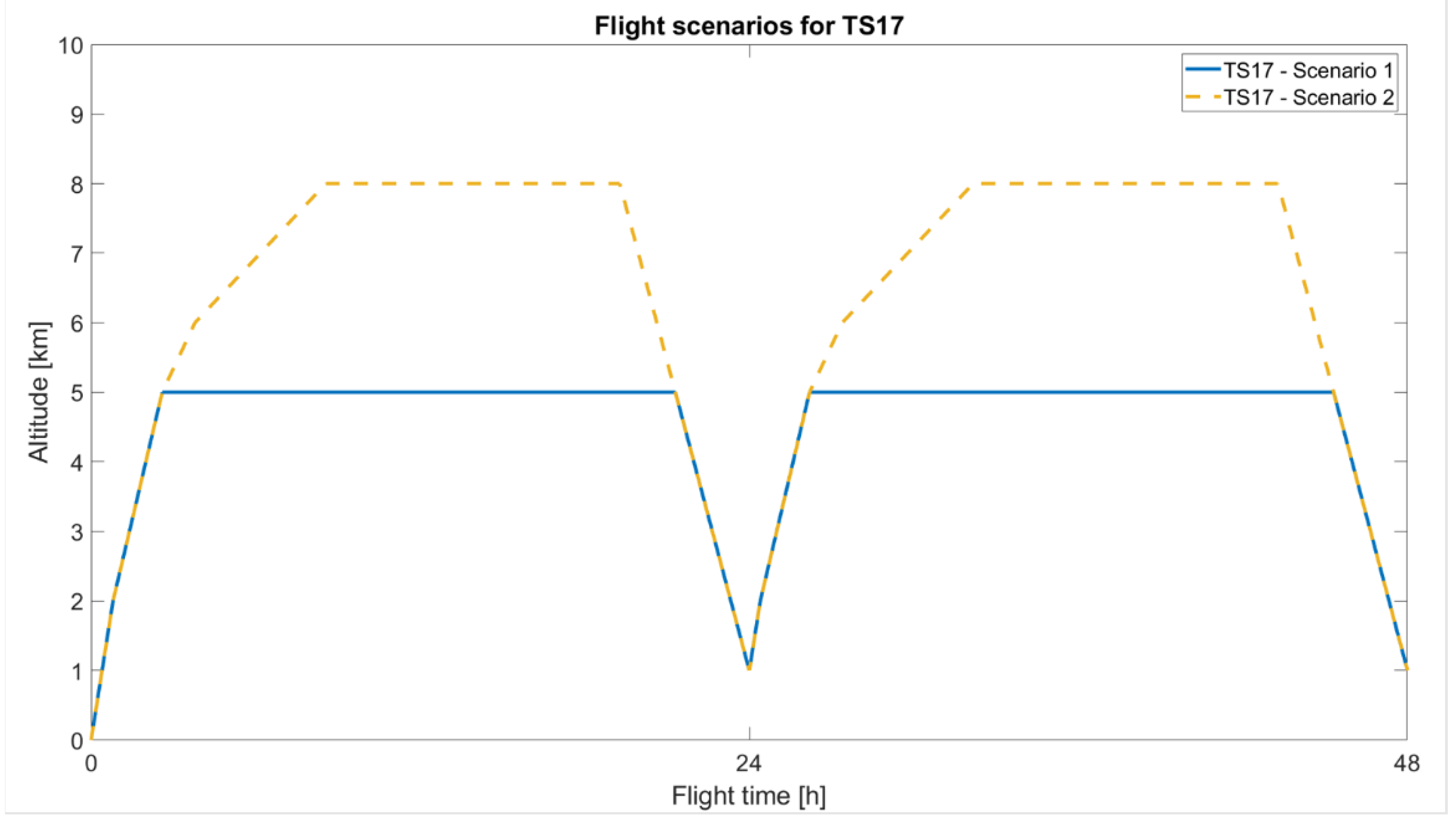
The TwinStratos 1:7 scenarios were divided into two parts (
Figure 11):
Ascending to a height of 5 km and then holding that ceiling. We start gliding to 1 km in this way to finish gliding in 24 h from the take-off
Ascending to a height of 8 km and then holding that ceiling. We start gliding to 1 km in this way to finish gliding in 24 h from the take-off
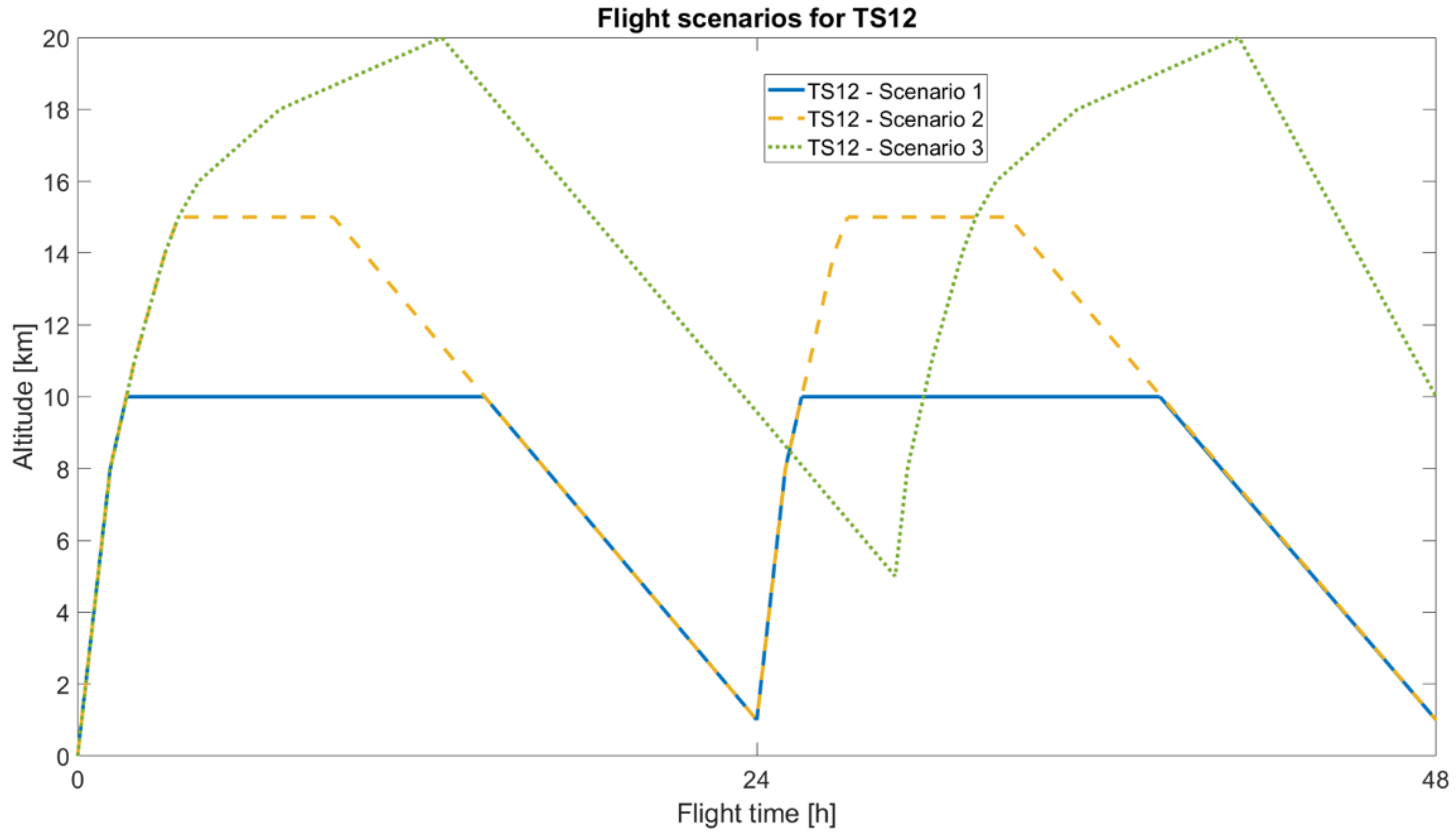
The TwinStratos 1:2 scenarios were divided for three parts (
Figure 12):
Ascending to a height of 10 km and then holding that ceiling. We start gliding to 1 km in this way to finish gliding in 24 h from the take-off.
Ascending to a height of 15 km and then holding that ceiling. We start gliding to 1 km in this way to finish gliding in 24 h from the take-off.
Ascending to a height of 20 km and then gliding to 1 km.
Figure 12.
Flight scenarios for TS12.
Figure 12.
Flight scenarios for TS12.
For the initial scenarios, we used a location of Gliwice. At the time of the first flights, we decided to set to the vernal equinox. If the UAV was unable to fly in this season, we would change the time to summer solstice to compare the results. As the temperature for the vernal equinox, we take a temperature of 15 °C, and for the summer solstice, 25 °C.
The data (partially included in
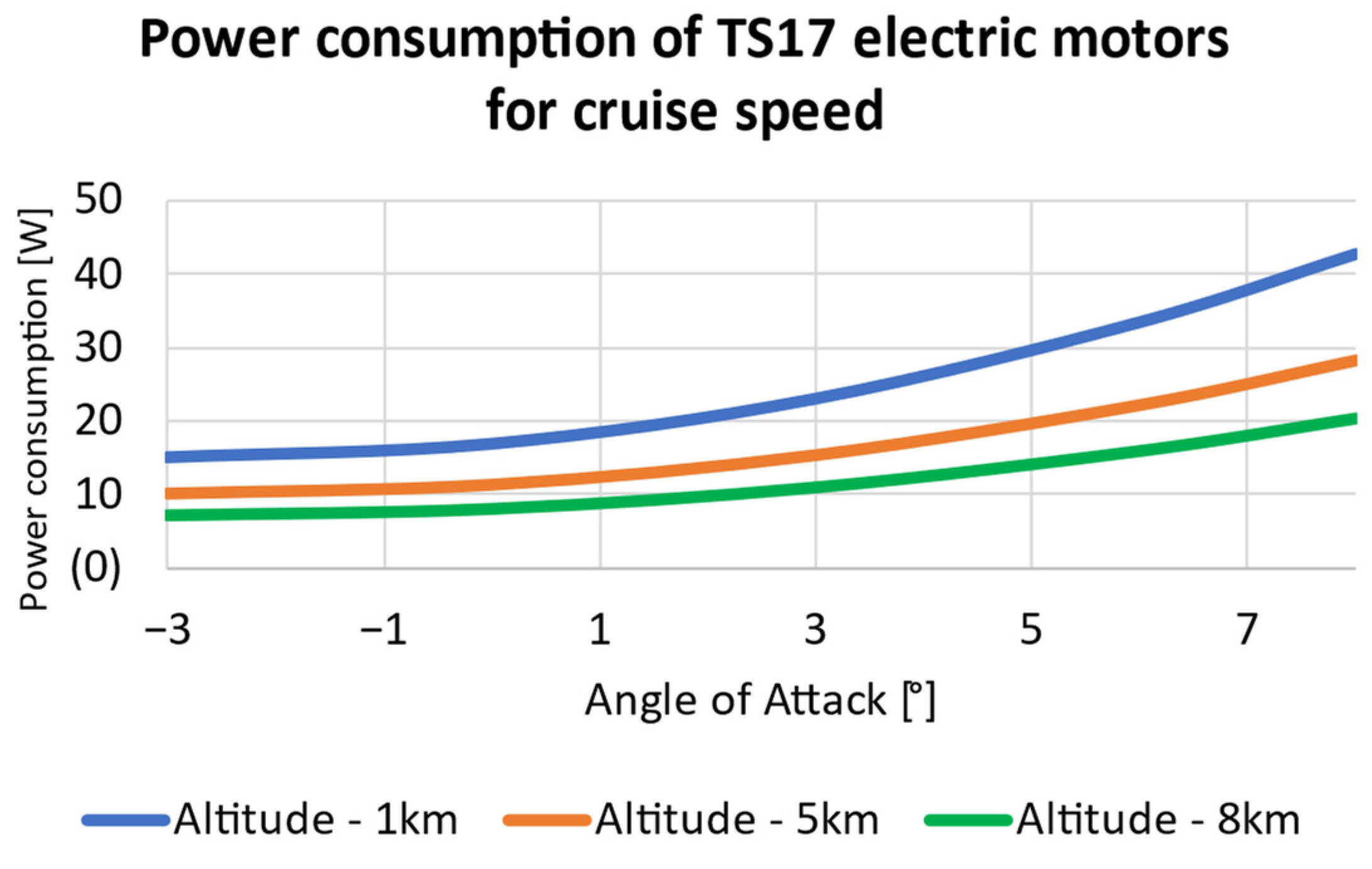
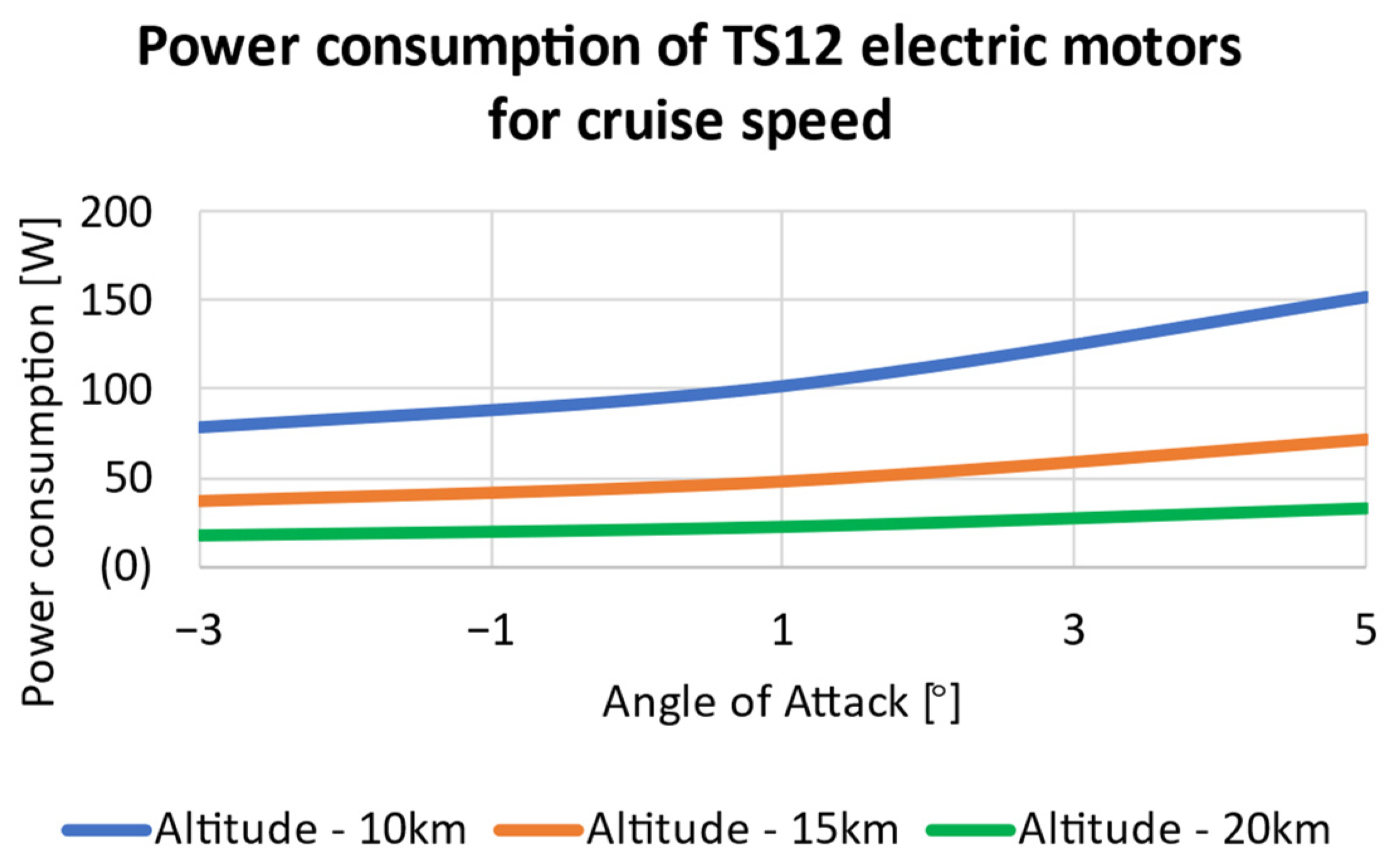
Table 2) for the simulation model of the power consumption were developed by aviation designers. These parameters were entered into the model. In the simulation model, we used data where the flight path angle is 4.3° for TS17 and 7.7° for TS12. To provide enough lift force, the angle of attack is equal to 6° for TS17 and 3.5° for TS12.
As in the initial stage of flight (take-off), we can climb fast with a high flight path angle; in further climbing to the higher levels, this value will be lower due to the air density decrease and pressure decrease. It can cause lower energy consumption.
The lower the air density, the higher the speed required by the UAV to fly. We assumed that to simplify the simulation model, the power consumption data will be the same as in the simulation model of the propulsion system. Increasing the airspeed at a reduced flight path angle should, to some degree, increase the power consumption.
Table 3 contains the flight path angle used in the power supply system simulation model.
5. Conclusions
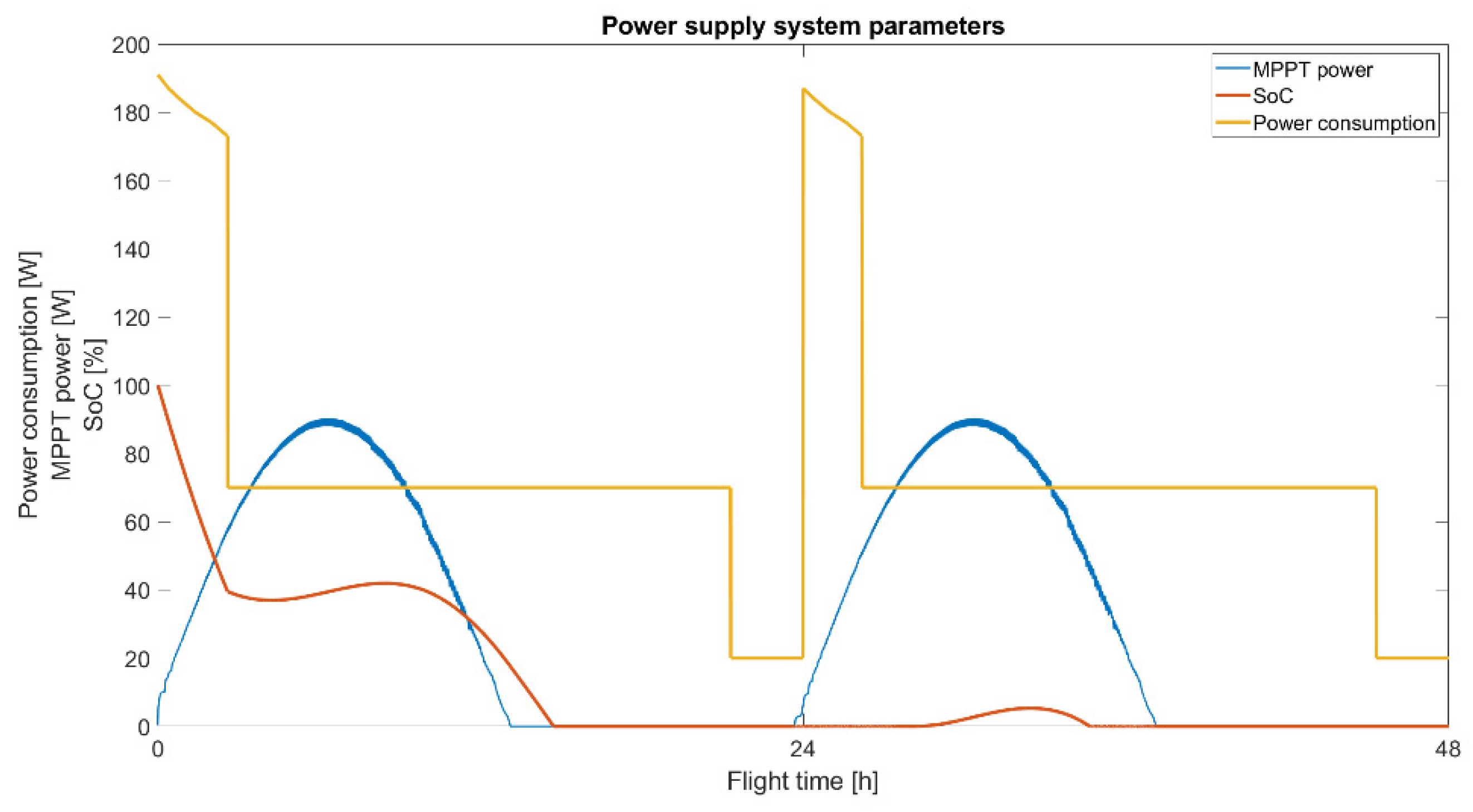
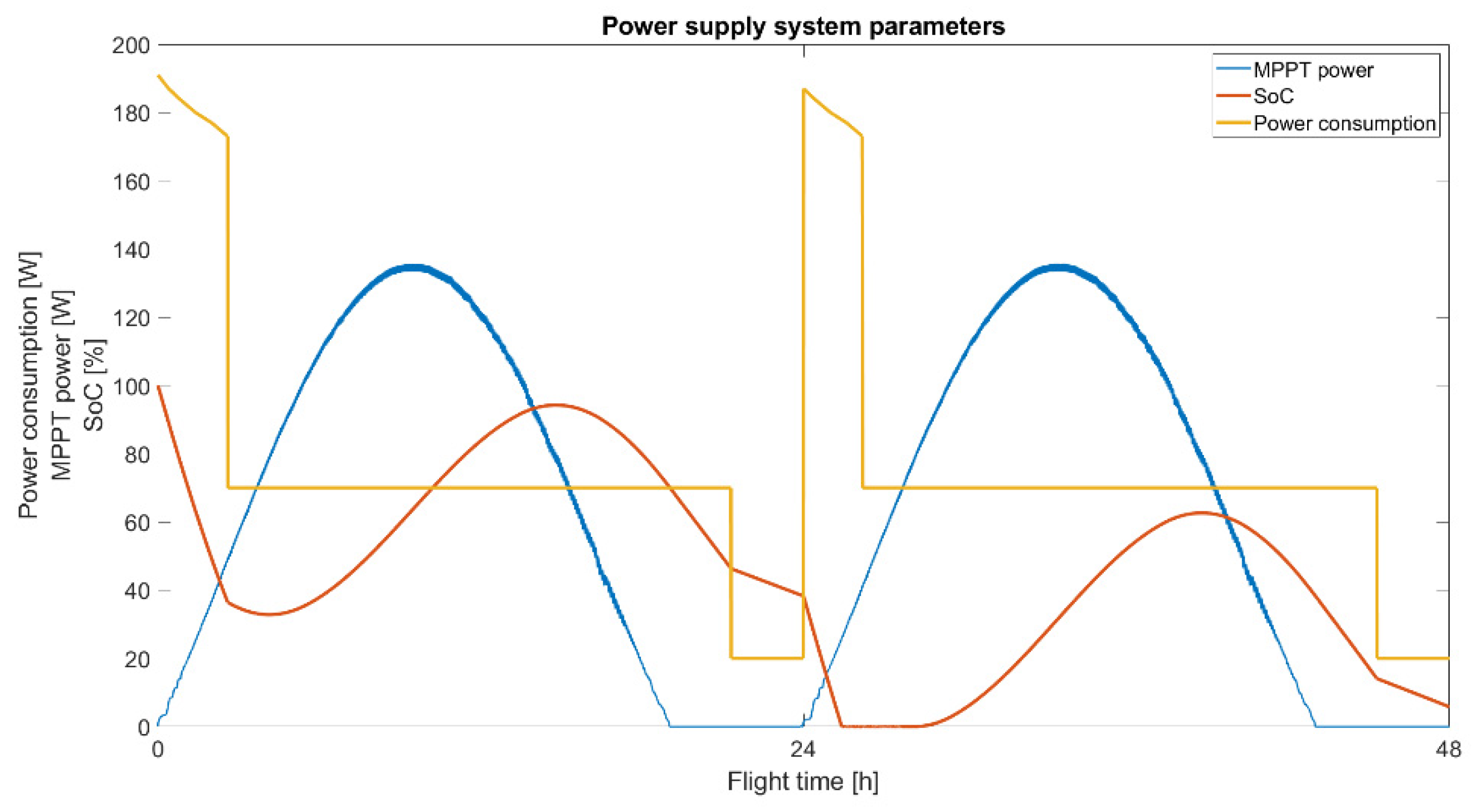
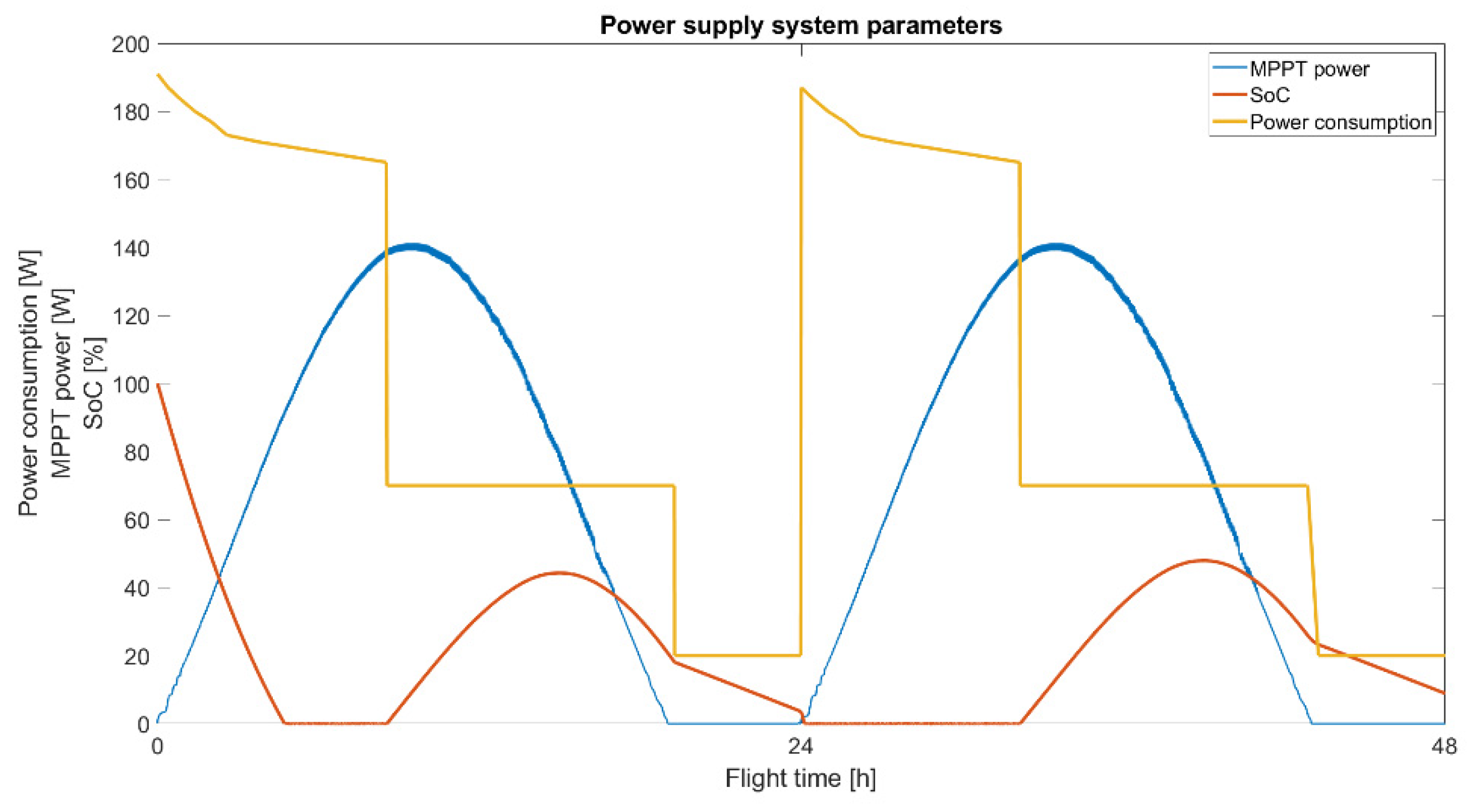
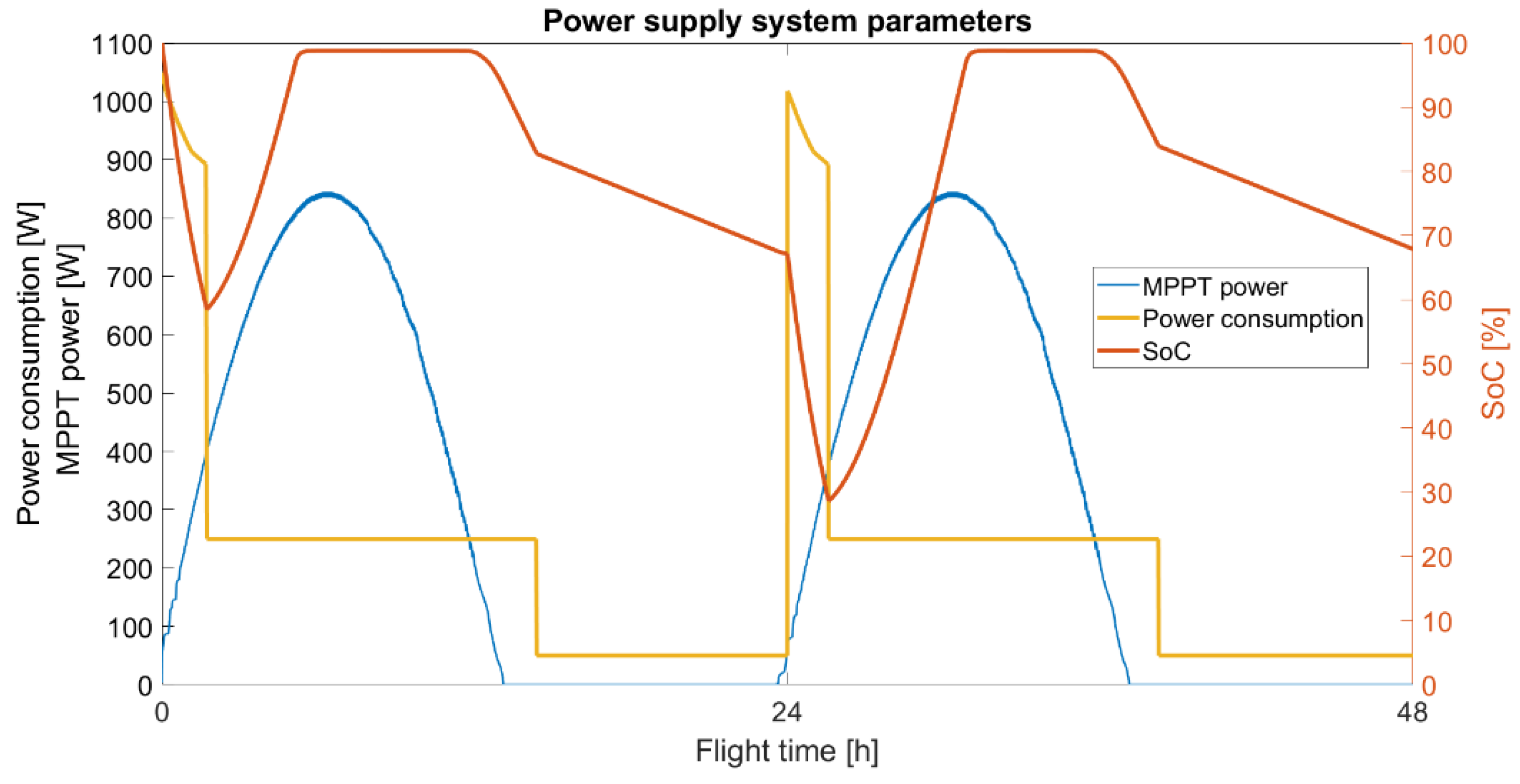
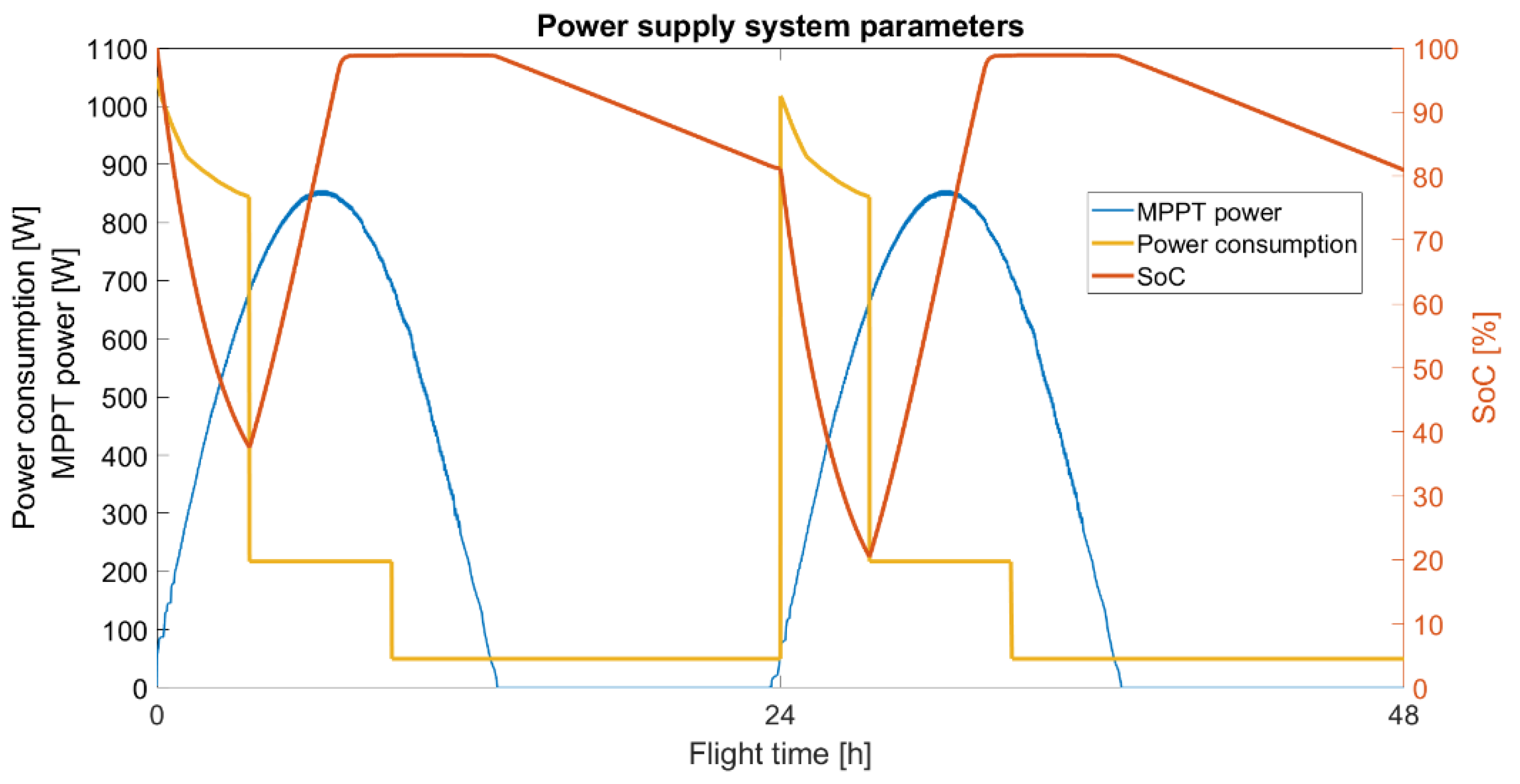
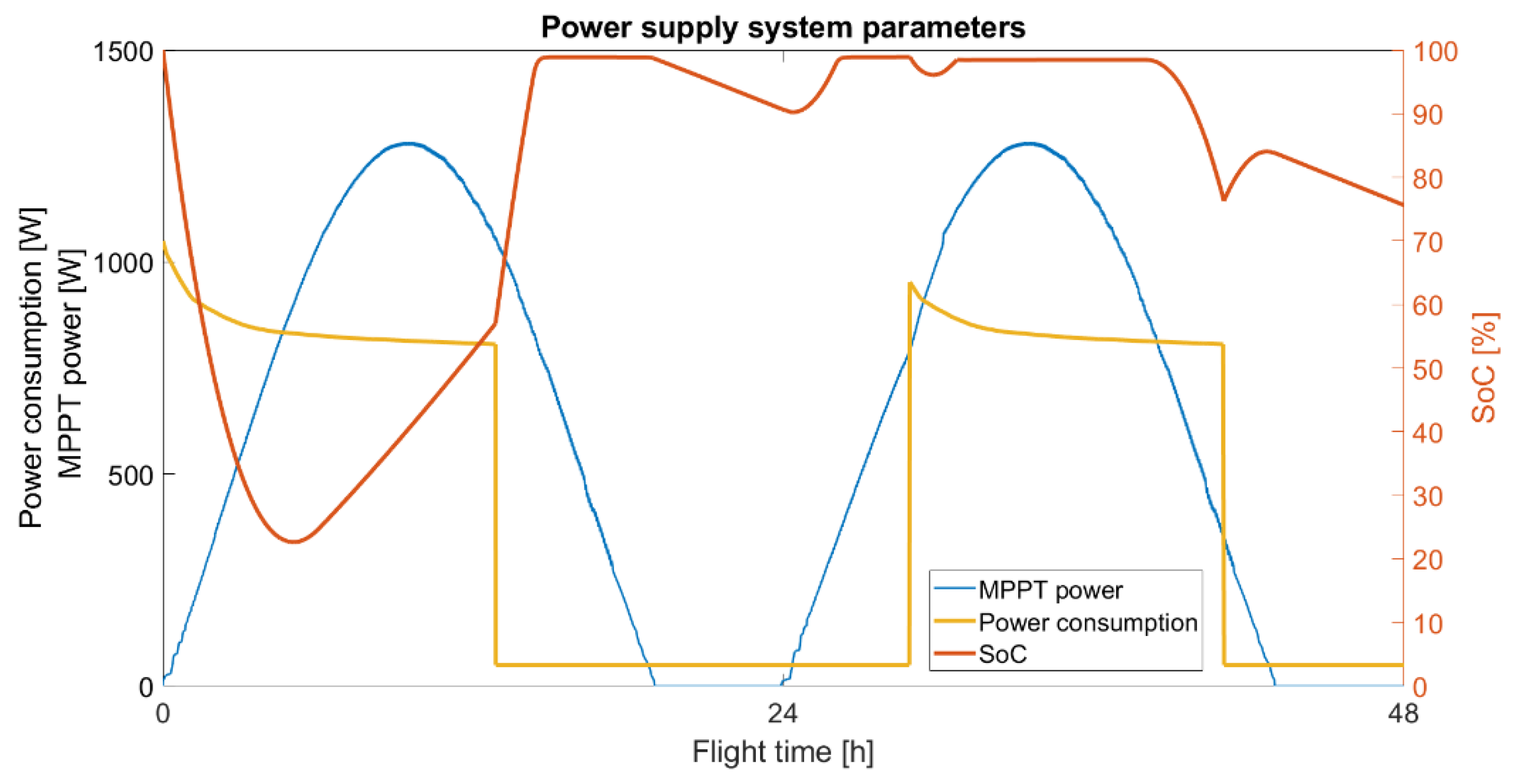
By analyzing the simulation graphs, it can be concluded that the most important issue when planning a long-endurance flight is the flight path and the appropriate weather conditions. The simulations show that a 24 h flight is feasible for the location of Gliwice during the spring equinox for TS12 and during the summer solstice for TS17. For both scenarios, sunny weather was adopted without cloud cover, which additionally allowed the UAVs to obtain more energy from the PV.
As the altitude increases, the energy obtained from the solar cells increases. However, due to the impossibility of obtaining the data from the real environment, the increase in this value was omitted and the data from 0 m above sea level were adopted.
The falling speed of TS12 and TS17 depends on the altitude, but for the calculations, this value has been simplified to one constant value for TS12 — 0.26 m/s — and0.41 m/s for TS17.
By analyzing the numerical simulations and the prepared flight scenarios, it can be concluded that the best ways to achieve a long endurance flight (at least 24 h) are the following elements:
The flight begins at sunrise. Take-off and climb are the stages that consume the most energy, so it is good to compensate for high energy consumption with energy produced from the photovoltaic system;
The potential energy accumulated in the form of height should be used as a time buffer, which is best used at night, when the photovoltaic system does not produce energy and the drive system does not consume energy from the power supply system;
Continuous, gradual increase in altitude during the day and keeping the altitude as high as possible until sunset or even more depending on the type of mission;
Commencement of the UAV gliding stage with sunset or supporting a specific altitude in such a way as to complete the stage of gliding to a given altitude with sunrise or later depending on the type of mission;
Flight sustain should be performed at the highest altitudes due to the lower energy demand of UAV propulsion systems;
When it is not possible to obtain a long endurance flight for the UAV, it may be necessary to change the flight duration, location, time of flight, or flight path;
If it is not possible to obtain flight-long endurance for the key set parameters, it may be necessary to change the design of the UAV, the number of solar cells, the capacity of the battery, or the weight of the payload.
It can be concluded that the TS17 scale is a bit too small for full energy autonomy. TS12 shows a greater degree of energy autonomy by achieving higher ceilings and a lower value of the ROD (Rate of Descent) than in the case of TS17. The TS12 has almost ten times more wing area than the TS17, as a result of which it is able to obtain ten times more energy during the flight than the TS17. An additional advantage in the energy balance of the TS12 is that the maximum power consumption is seven times higher than in the case of TS17. Comparing the energy that can be produced by the TwinStratos 1:2 and 1:7 and their energy demand, it can be seen that a better energy balance is achieved by TS12.
Another milestone that our team has taken into account is the highest possible altitude to be achieved. When analyzing the flight duration, we noticed that sometimes the maximum altitude of TS is not possible to reach, particularly when starting the flight at sunrise (e.g.,
Figure 26 and
Figure 29), or during the not appropriate period. In the event that the energy demand during take-off and climb is the highest, and the PV energy is insufficient at some point, the battery discharges, preventing the UAV from continue to climb.
By analyzing the energy demand and PV power, it can be concluded that the best time to complete the mission aimed at achieving the highest ceiling is not sunrise, but around noon, when the sun is at its highest. In this case, the energy obtained from the PV will partially cover the energy demand of the electric motors and the UAV’s control systems. The limitations are also related to the time needed to reach a given altitude. These considerations should be taken into account when we are choosing the time of the UAV’s take-off.
The full set of equipment depends on the mission being performed, which is not fully defined at this stage of the work; therefore, simplifications have been made in the model after defining the mission and the various sets of measuring/observation devices. Another reason for simplifying the model is the lack of detailed data for many on-board subsystems with energy consumption characteristics. For many, only the maximum power of the device is given and the load characteristics are not analyzed. In laboratory tests, it is also difficult to confirm the characteristics of many subsystems. The team is planning intensive work on the problem indicated by the reviewer during the flight tests. Therefore, the entire power supply system has been measured in detail and is equipped with controllers and accessories that allow for connecting and disconnecting individual power supply systems.
TS17 and TS12 will be made with the technology of ultra-light composite structures. Currently, TS17 is at the construction stage and the prototype is shown in
Figure 5. Only flights in the real environment will allow the correctness of the simulation and its results to be verified. The completed missions will provide the necessary data to fine-tune the simulation model. Another stage will be the intended use of the UAV, taking into consideration its equipment and the weight of its on-board devices. In the event that, in a given mission, it is not possible to perform a long-endurance flight, the mission can be postponed until the summer solstice or the 24 h flight stage can be avoided, with an emphasis on the implementation of a specific mission.




 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}