
Modeling of Vehicle-Mounted Flywheel Battery Considering Automobile Suspension and Pulse Road Excitation


Abstract
:1. Introduction
2. Mathematical Model and Dynamic Correction
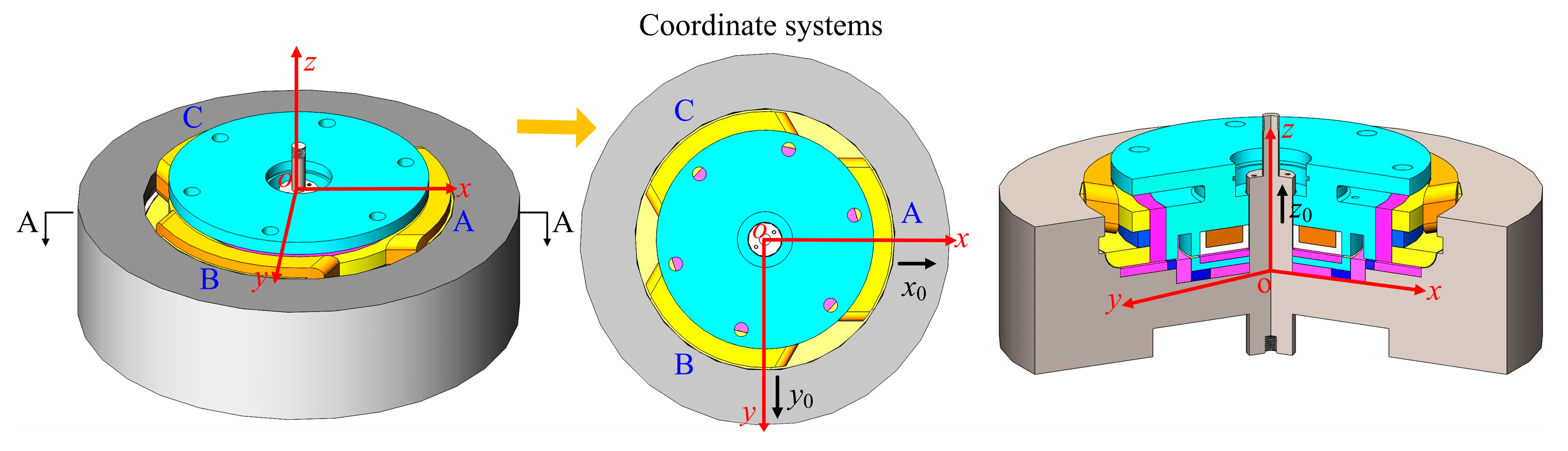
2.1. Topology
2.2. Static Magnetic Suspension Force Model
2.3. Dynamic Magnetic Suspension Force Model
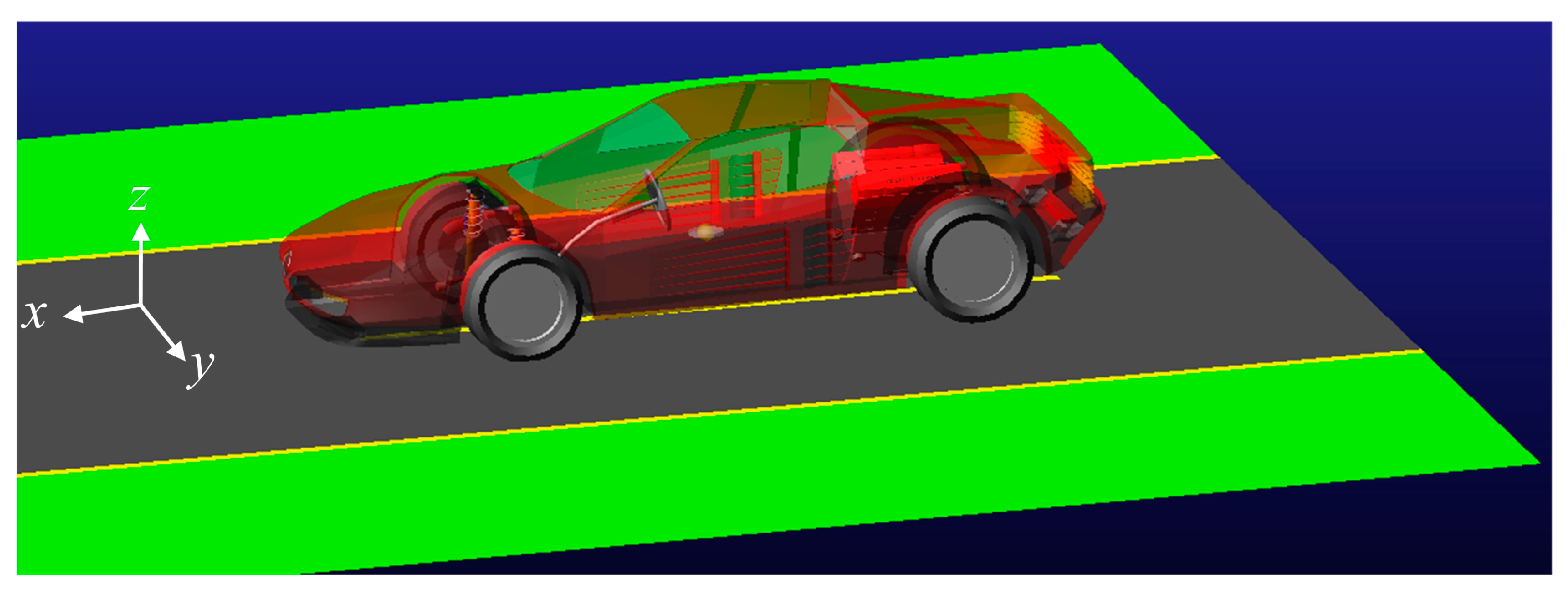
2.4. Parameters of Automobile Suspension System
2.5. Simulation Model Based on ADAMS
3. Modeling and Control of the Flywheel Battery with a Virtual Inertia Spindle Considering Automobile Suspension and Pulse Road Excitation
3.1. Chassis Acceleration under Pulse Road Excitation
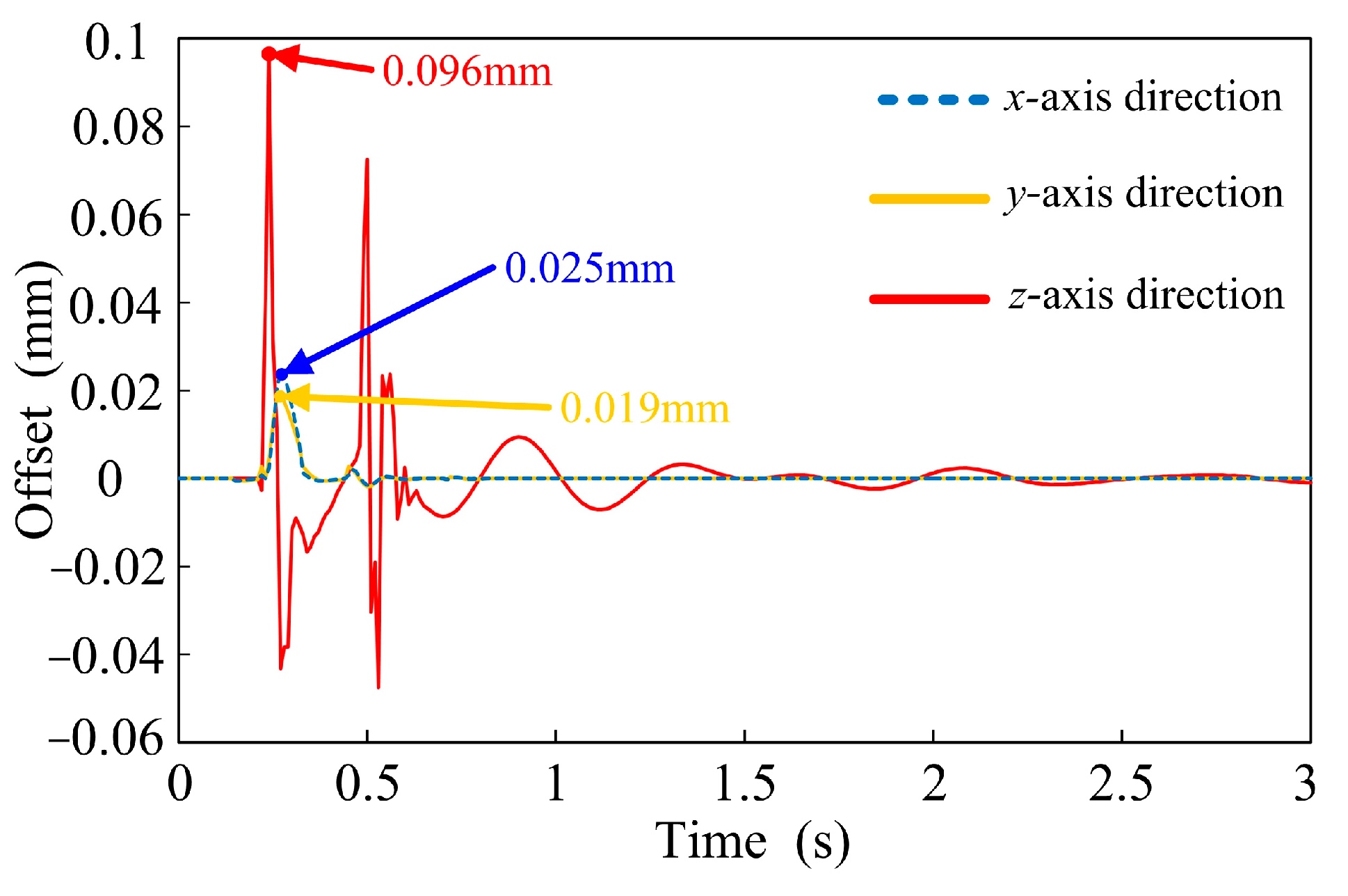
3.2. Contrastive Analysis of Radial and Axial Offsets
3.3. Contrastive Analysis of Different Vehicle Types
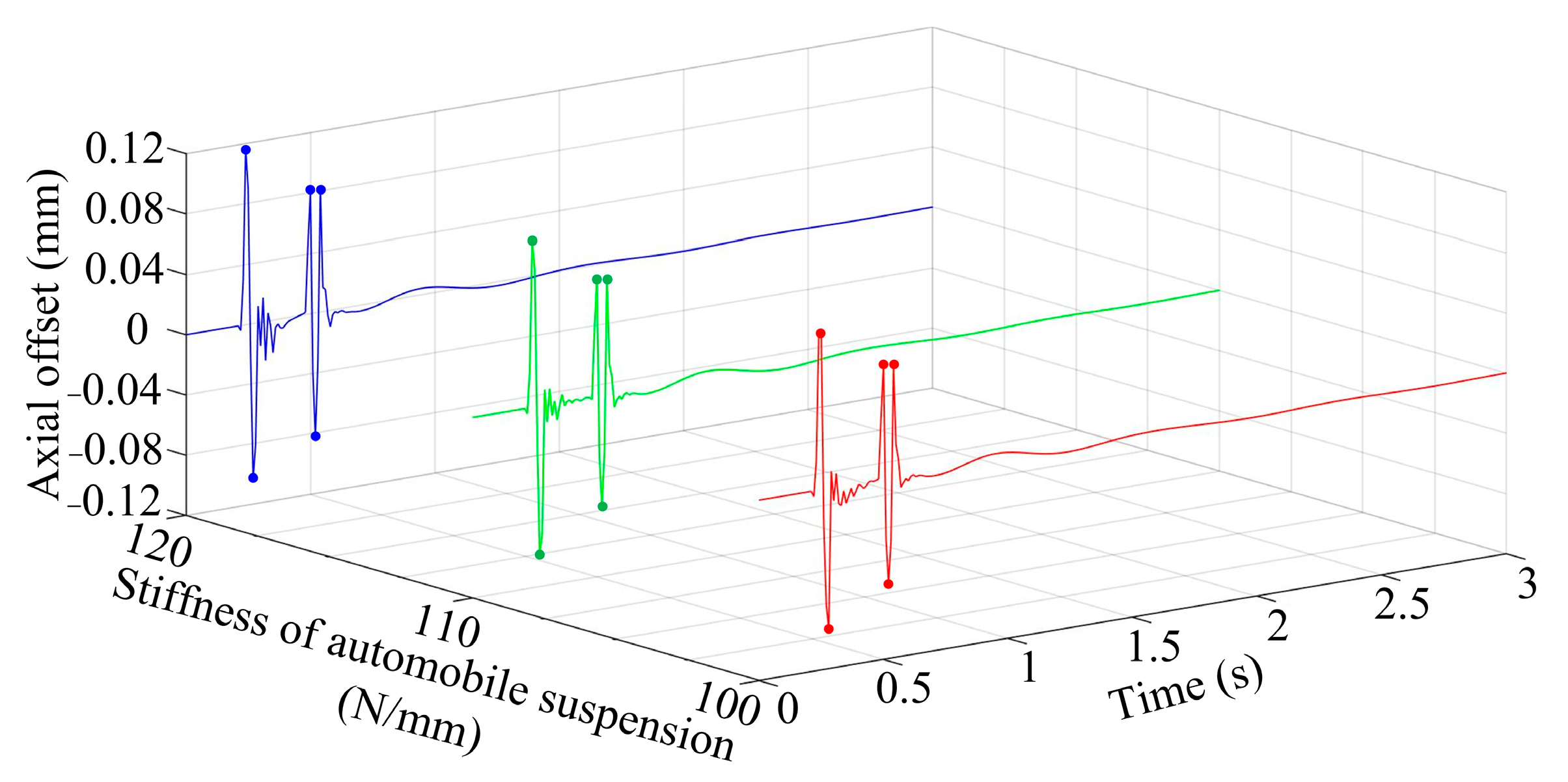
3.4. Different Stiffness Values of Automobile Suspension
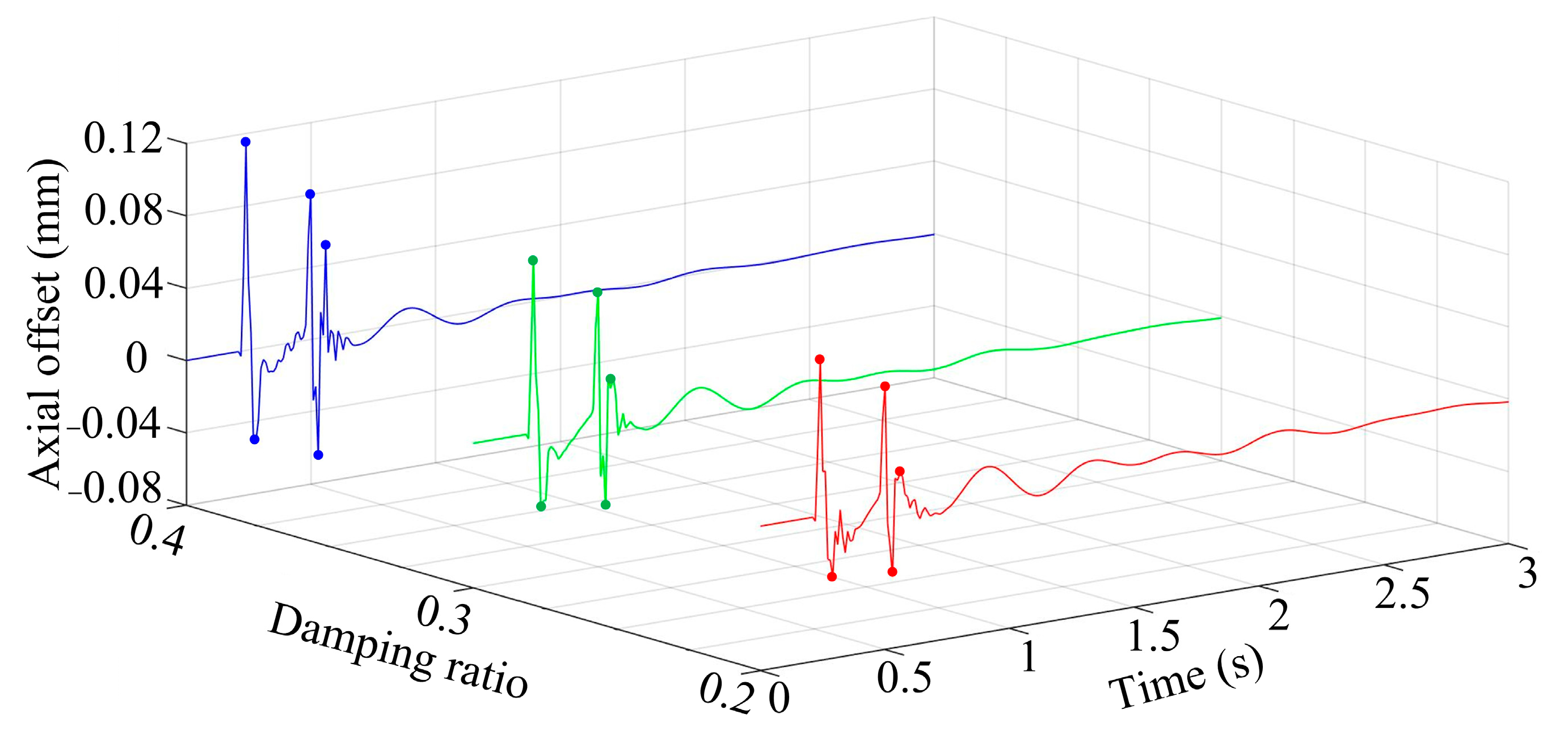
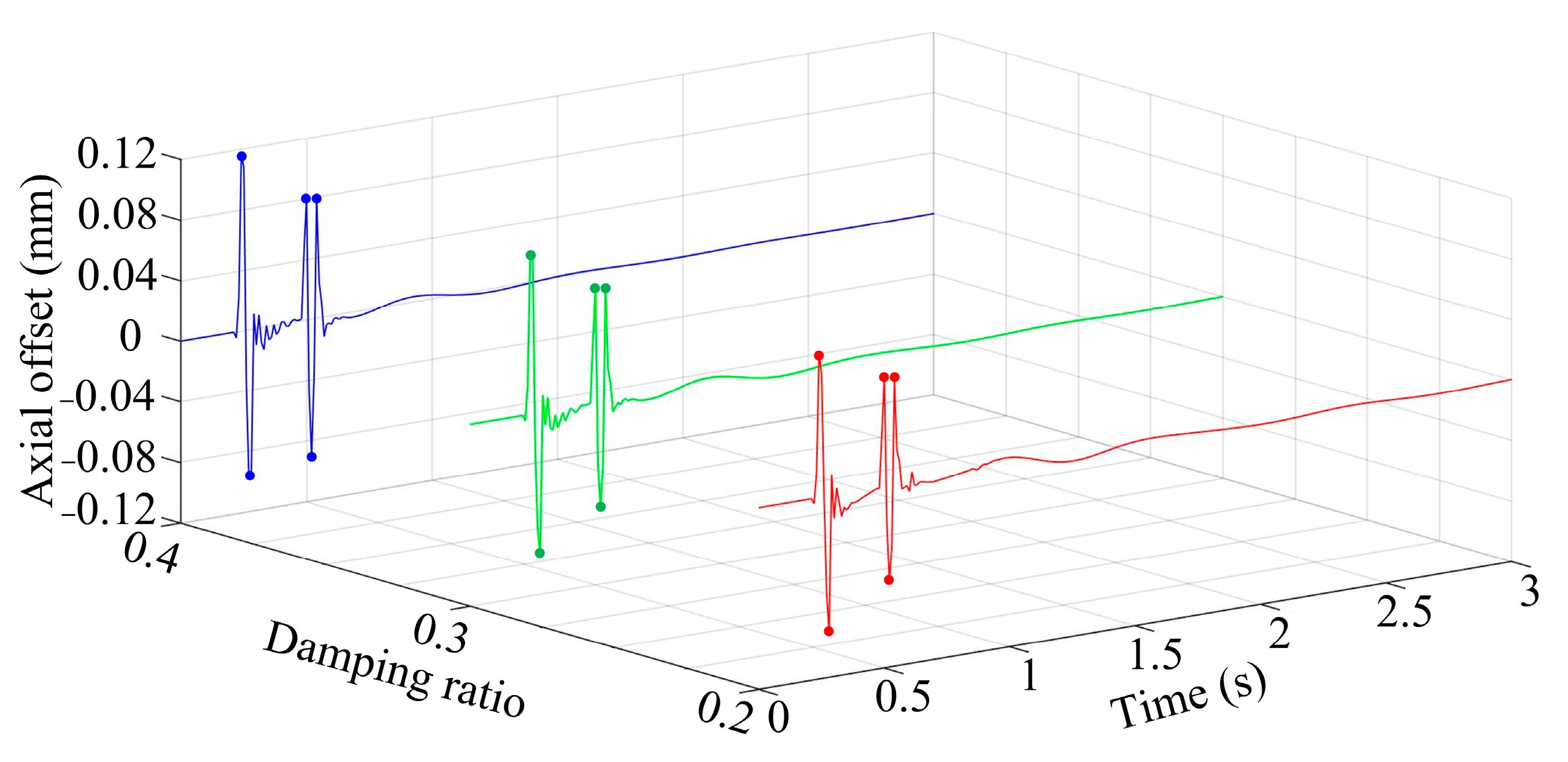
3.5. Different Damping Ratios
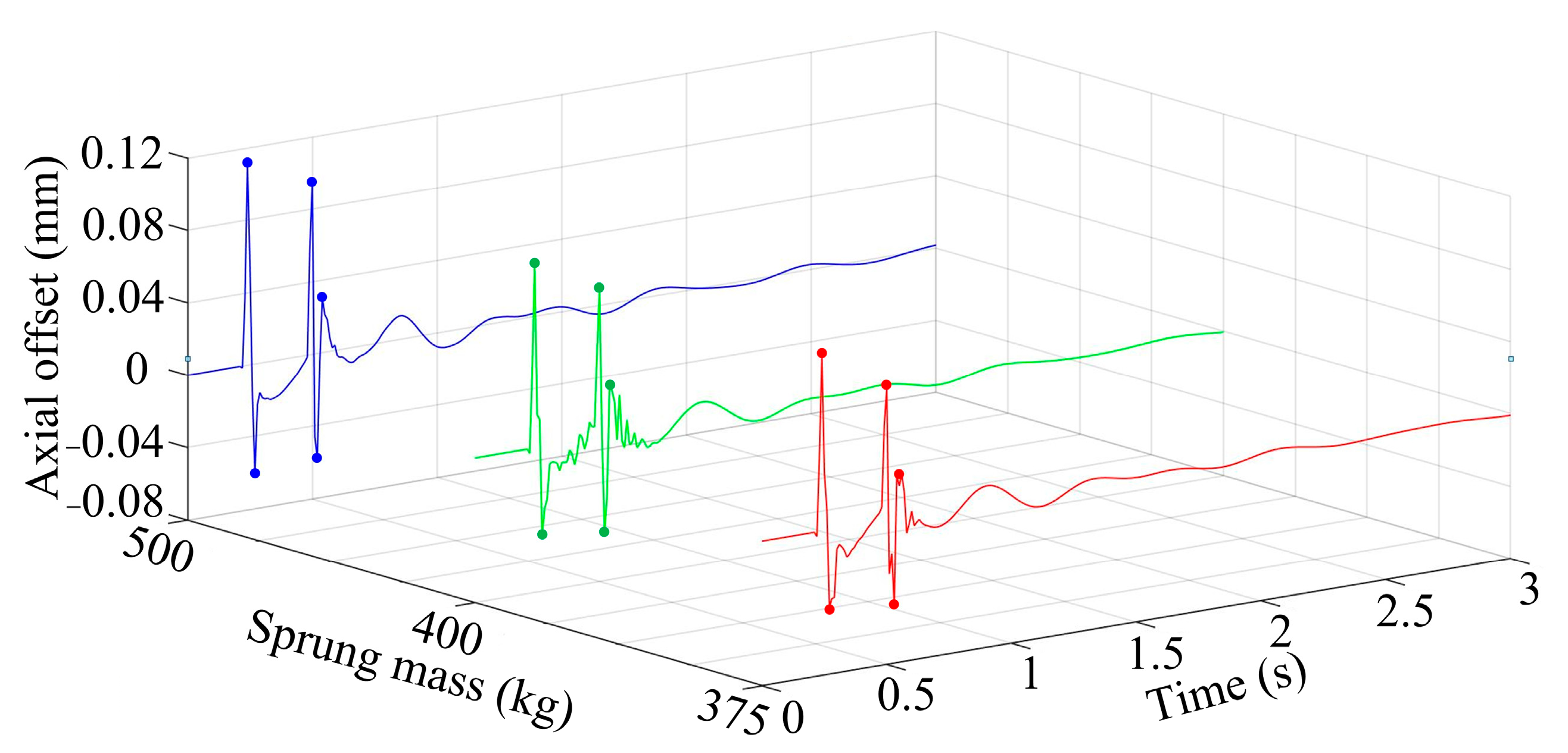
3.6. Different Sprung Masses
3.7. Brief Summary of Bullet Points
- (1)
- In order to improve the calculation accuracy of the dynamic magnetic suspension force model, a dynamic model considering automobile suspension and typical road conditions should be established based on ADAMS, so as to correct the magnetic suspension force model according to the dynamic response rules.
- (2)
- It is worth noting that under the typical road conditions (speed bump) used in this paper, the radial degree of freedom was particularly less affected compared to the axial degree of freedom. Therefore, only the axial magnetic suspension force model was taken as an example for model correction in this paper. In addition, a stiffness value of automobile suspension that is too small can cause excessive vibration of the vehicle body, which is avoided during the vehicle manufacturing process. Therefore, such parameters of automobile suspension can be disregarded during modeling.
- (3)
- Under the comprehensive consideration of automobile suspension and typical road conditions, it can be found that the main factor affecting the dynamic response rules is the vehicle type. Compared to the dynamic response using saloon vehicles, the dynamic response using off-road vehicles has a shorter adjustment time, but the overall offset also significantly increases. Furthermore, for the dynamic response using saloon vehicles, a small change in the automobile suspension stiffness will significantly affect the adjustment time. However, when the vehicle type is the same, within a certain range of automobile suspension parameters, the dynamic response rules of the flywheel do not change significantly; it is mainly a small change in the overall offset.
- (4)
- For cases such as in this paper, where the dynamic response had the same trend and the trend was regular within a certain range of independent variables, the Lagrange interpolation method can be used for mean fitting to correct the magnetic suspension force model.
3.8. PID Control Diagram
3.9. PID Controller Applicable to Different Vehicle Types
4. Experiment and Analysis
4.1. Experimental Platform for Pulse Road Excitation
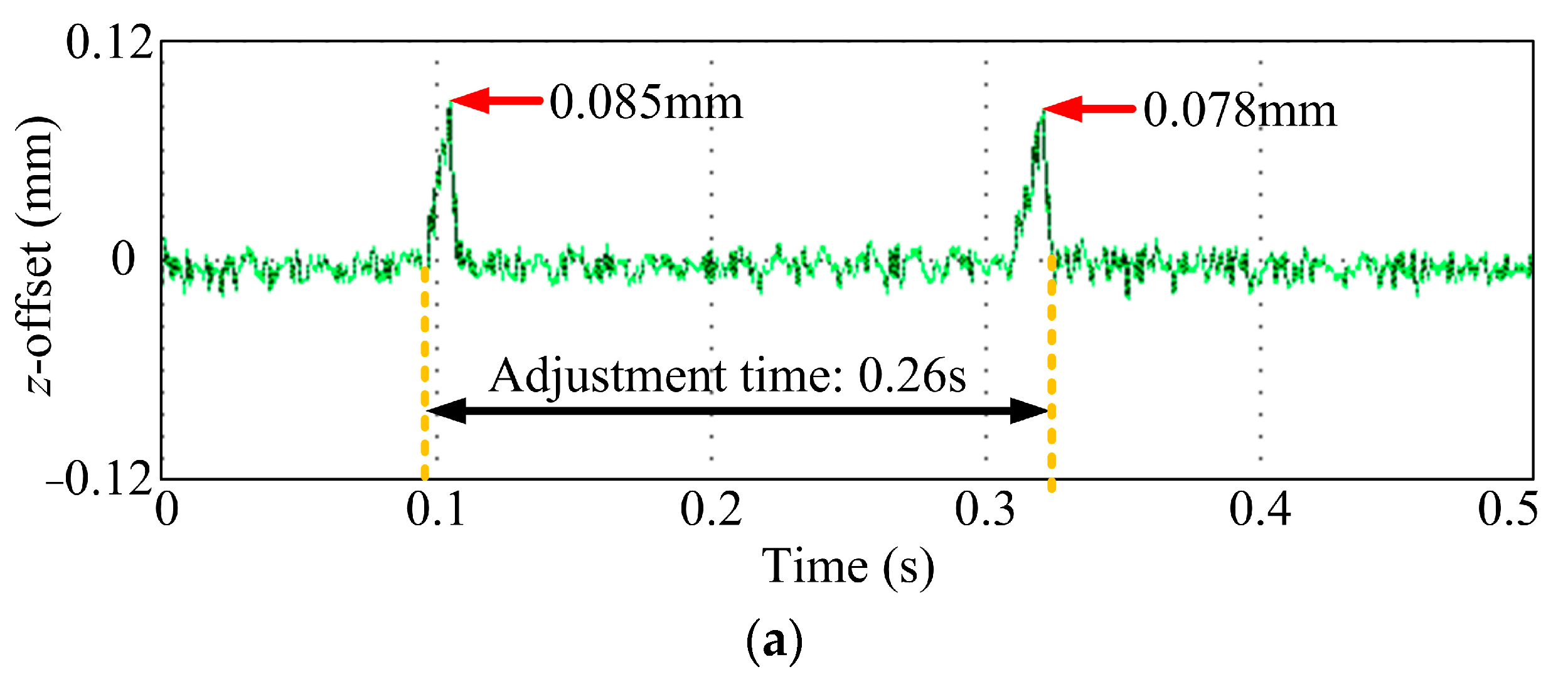
4.2. Performance Tests
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ren, Y.; Su, D.; Fang, J.C. Whirling modes stability criterion for a magnetically suspended flywheel rotor with significant gyroscopic effects and bending modes. IEEE Trans. Power Electron. 2013, 28, 5890–5901. [Google Scholar] [CrossRef]
- Li, X.J.; Anvari, B.; Palazzolo, A.; Wang, Z.Y.; Toliyat, H. A utility-scale flywheel energy storage system with a shaftless, hubless, high-strength steel rotor. IEEE Trans. Ind. Electron. 2018, 65, 6667–6675. [Google Scholar] [CrossRef]
- Peng, C.; Zheng, S.Q.; Huang, Z.Y.; Zhou, X.X. Complete synchronous vibration suppression for a variable-speed magnetically suspended flywheel using phase lead compensation. IEEE Trans. Ind. Electron. 2018, 65, 5837–5846. [Google Scholar] [CrossRef]
- Sun, B.; Dragičević, T.; Freijedo, F.D.; Vasquez, J.C.; Guerrero, J.M. A control algorithm for electric vehicle fast charging stations equipped with flywheel energy storage systems. IEEE Trans. Power Electron. 2016, 31, 6674–6685. [Google Scholar] [CrossRef]
- Sun, Y.G.; Xu, J.Q.; Han, W.; Lin, G.B.; Mumtaz, S. Deep learning based semi-supervised control for vertical security of maglev vehicle with guaranteed bounded airgap. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4431–4442. [Google Scholar] [CrossRef]
- Glücker, P.; Kivekäs, K.; Vepsäläinen, J.; Mouratidis, P.; Schneider, M.; Rinderknecht, S.; Tammi, K. Prolongation of Battery Lifetime for Electric Buses through Flywheel Integration. Energies 2021, 14, 899. [Google Scholar] [CrossRef]
- Peng, C.; Zhu, M.T.; Wang, K.; Ren, Y.; Deng, Z.Q. A two-stage synchronous vibration control for magnetically suspended rotor system in the full speed range. IEEE Trans. Ind. Electron. 2020, 67, 480–489. [Google Scholar] [CrossRef]
- Han, B.C.; Chen, Y.L.; Zheng, S.Q.; Li, M.X.; Xie, J.J. Whirl mode suppression for AMB-rotor systems in control moment gyros considering significant gyroscopic effects. IEEE Trans. Ind. Electron. 2020, 68, 4249–4258. [Google Scholar] [CrossRef]
- Ren, Y.; Chen, X.C.; Cai, Y.W.; Zhang, H.J.; Xin, C.J.; Lin, Q. Attitude-rate measurement and control integration using magnetically suspended control and sensitive gyroscopes. IEEE Trans. Ind. Electron. 2018, 65, 4921–4932. [Google Scholar] [CrossRef]
- Zhang, W.Y.; Gu, X.W.; Zhang, L.D. Robust Controller Considering Road Disturbances for a Vehicular Flywheel Battery System. Energies 2022, 15, 5432. [Google Scholar] [CrossRef]
- Zhang, W.Y.; Yang, H.K.; Cheng, L.; Zhu, H.Q. Modeling Based on Exact Segmentation of Magnetic Field for a Centripetal Force Type-Magnetic Bearing. IEEE Trans. Ind. Electron. 2020, 67, 7691–7701. [Google Scholar] [CrossRef]
- Zhang, W.Y.; Cheng, L.; Zhu, H.Q. Suspension Force Error Source Analysis and Multidimensional Dynamic Model for a Centripetal Force Type-Magnetic Bearing. IEEE Trans. Ind. Electron. 2020, 67, 7617–7628. [Google Scholar] [CrossRef]
- Zhang, W.Y.; Zhang, L.D.; Li, K.; Zhu, H.Q. Dynamic correction model considering influence of foundation motions for a centripetal force type-magnetic bearing. IEEE Trans. Ind. Electron. 2021, 68, 9811–9821. [Google Scholar] [CrossRef]
- Zhang, P.; Zhu, C. Vibration Control of Base-Excited Rotors Supported by Active Magnetic Bearing Using a Model-Based Compensation Method. IEEE Trans. Ind. Electron. 2023. [Google Scholar] [CrossRef]
- Ding, G.P.; Zhou, Z.D.; Hu, Y.F. Test of base vibration influence on dynamics of a magnetic suspended disk. In Proceedings of the 2008 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Xi’an, China, 2–5 July 2008; pp. 308–313. [Google Scholar]
- Soni, T.; Sodhi, R. Impact of harmonic road disturbances on active magnetic bearing supported flywheel energy storage system in electric vehicles. In Proceedings of the 2019 IEEE Transportation Electrification Conference (ITEC-India), Bengaluru, India, 17–19 December 2019; pp. 1–4. [Google Scholar]
- Kasarda, M.E.; Clements, J.; Wicks, A.L.; Hall, C.D.; Kirk, R.G. Effect of sinusoidal base motion on a magnetic bearing. In Proceedings of the 2000 IEEE International Conference on Control Applications, Anchorage, AK, USA, 27 September 2000; pp. 144–149. [Google Scholar]
- Zhang, W.Y.; Wang, J.P.; Zhu, P.F.; Yu, J.X. A novel vehicle-mounted magnetic suspension flywheel battery with a virtual inertia spindle. IEEE Trans. Ind. Electron. 2022, 69, 5973–5983. [Google Scholar] [CrossRef]
- Preumont, A.; Seto, K. Active Control of Structures; John Wiley & Sons: New York, NY, USA, 2008. [Google Scholar]
- Suciu, C.V.; Tobiishi, T.; Mouri, R. Modeling and Simulation of a Vehicle Suspension with Variable Damping and Elastic Properties versus the Excitation Frequency. In Proceedings of the 2011 International Conference on P2P, Parallel, Grid, Cloud and Internet Computing, Barcelona, Spain, 26–28 October 2011; pp. 402–407. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| c3/c2 | c2/c1 | c3/c1 | OPi | |
|---|---|---|---|---|
| Main migration point 1 | 1.08 | 1.08 | 1.17 | 1.11 |
| Main migration point 2 | 1.31 | 1.27 | 1.65 | 1.41 |
| Main migration point 3 | 1.14 | 1.06 | 1.21 | 1.14 |
| Main migration point 4 | 1.25 | 1.30 | 1.62 | 1.39 |
| Main migration point 5 | 1.30 | 1.32 | 1.72 | 1.45 |
| c3/c2 | c2/c1 | c3/c1 | OPi | |
|---|---|---|---|---|
| Main migration point 1 | 1.06 | 1.05 | 1.11 | 1.07 |
| Main migration point 2 | 1.05 | 1.05 | 1.11 | 1.07 |
| Main migration point 3 | 1.04 | 1.01 | 1.05 | 1.03 |
| Main migration point 4 | 1.12 | 1.06 | 1.19 | 1.12 |
| Main migration point 5 | 1.07 | 1.04 | 1.11 | 1.07 |
| c3/c2 | c2/c1 | c3/c1 | OPi | |
|---|---|---|---|---|
| Main migration point 1 | 1.18 | 1.11 | 1.31 | 1.20 |
| Main migration point 2 | 1.19 | 1.24 | 1.48 | 1.30 |
| Main migration point 3 | 1.12 | 1.10 | 1.23 | 1.15 |
| Main migration point 4 | 1.39 | 1.18 | 1.64 | 1.40 |
| Main migration point 5 | 2.10 | 1.44 | 3.02 | 2.19 |
| c3/c2 | c2/c1 | c3/c1 | OPi | |
|---|---|---|---|---|
| Main migration point 1 | 1.11 | 1.16 | 1.29 | 1.19 |
| Main migration point 2 | 1.04 | 1.04 | 1.08 | 1.05 |
| Main migration point 3 | 1.05 | 1.05 | 1.10 | 1.07 |
| Main migration point 4 | 1.31 | 1.10 | 1.44 | 1.28 |
| Main migration point 5 | 1.08 | 1.07 | 1.15 | 1.10 |
| c3/c2 | c2/c1 | c3/c1 | OPi | |
|---|---|---|---|---|
| Main migration point 1 | 1.10 | 1.04 | 1.15 | 1.10 |
| Main migration point 2 | 1.24 | 1.13 | 1.40 | 1.26 |
| Main migration point 3 | 1.17 | 1.12 | 1.30 | 1.20 |
| Main migration point 4 | 1.11 | 1.10 | 1.23 | 1.15 |
| Main migration point 5 | 1.14 | 1.13 | 1.30 | 1.19 |
| c3/c2 | c2/c1 | c3/c1 | OPi | |
|---|---|---|---|---|
| Main migration point 1 | 1.11 | 1.06 | 1.18 | 1.12 |
| Main migration point 2 | 1.12 | 1.06 | 1.18 | 1.12 |
| Main migration point 3 | 1.18 | 1.07 | 1.26 | 1.17 |
| Main migration point 4 | 1.17 | 1.11 | 1.30 | 1.19 |
| Main migration point 5 | 1.09 | 1.05 | 1.15 | 1.10 |
| Different Stiffness Values of Automobile Suspension | Different Damping Ratios | Different Sprung Masses | |
|---|---|---|---|
| Low stiffness of automobile suspension | kf1 | kf3 | kf5 |
| High stiffness of automobile suspension | kf2 | kf4 | kf6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Yu, J. Modeling of Vehicle-Mounted Flywheel Battery Considering Automobile Suspension and Pulse Road Excitation. Energies 2023, 16, 4288. https://doi.org/10.3390/en16114288
Zhang W, Yu J. Modeling of Vehicle-Mounted Flywheel Battery Considering Automobile Suspension and Pulse Road Excitation. Energies. 2023; 16(11):4288. https://doi.org/10.3390/en16114288
Chicago/Turabian StyleZhang, Weiyu, and Juexin Yu. 2023. "Modeling of Vehicle-Mounted Flywheel Battery Considering Automobile Suspension and Pulse Road Excitation" Energies 16, no. 11: 4288. https://doi.org/10.3390/en16114288