

A Comprehensive Review of Hybrid State Estimation in Power Systems: Challenges, Opportunities and Prospects




Abstract
:1. Introduction
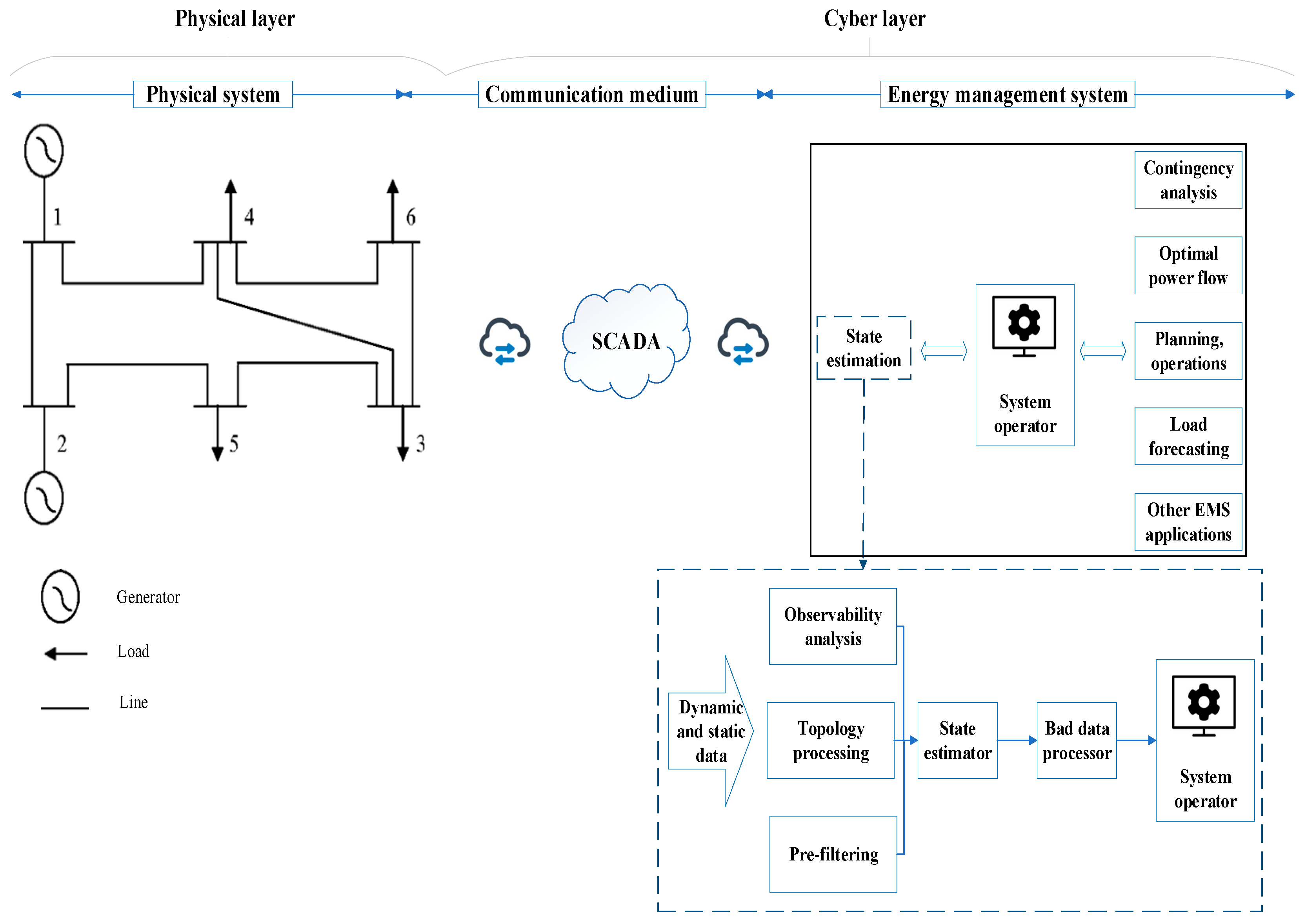
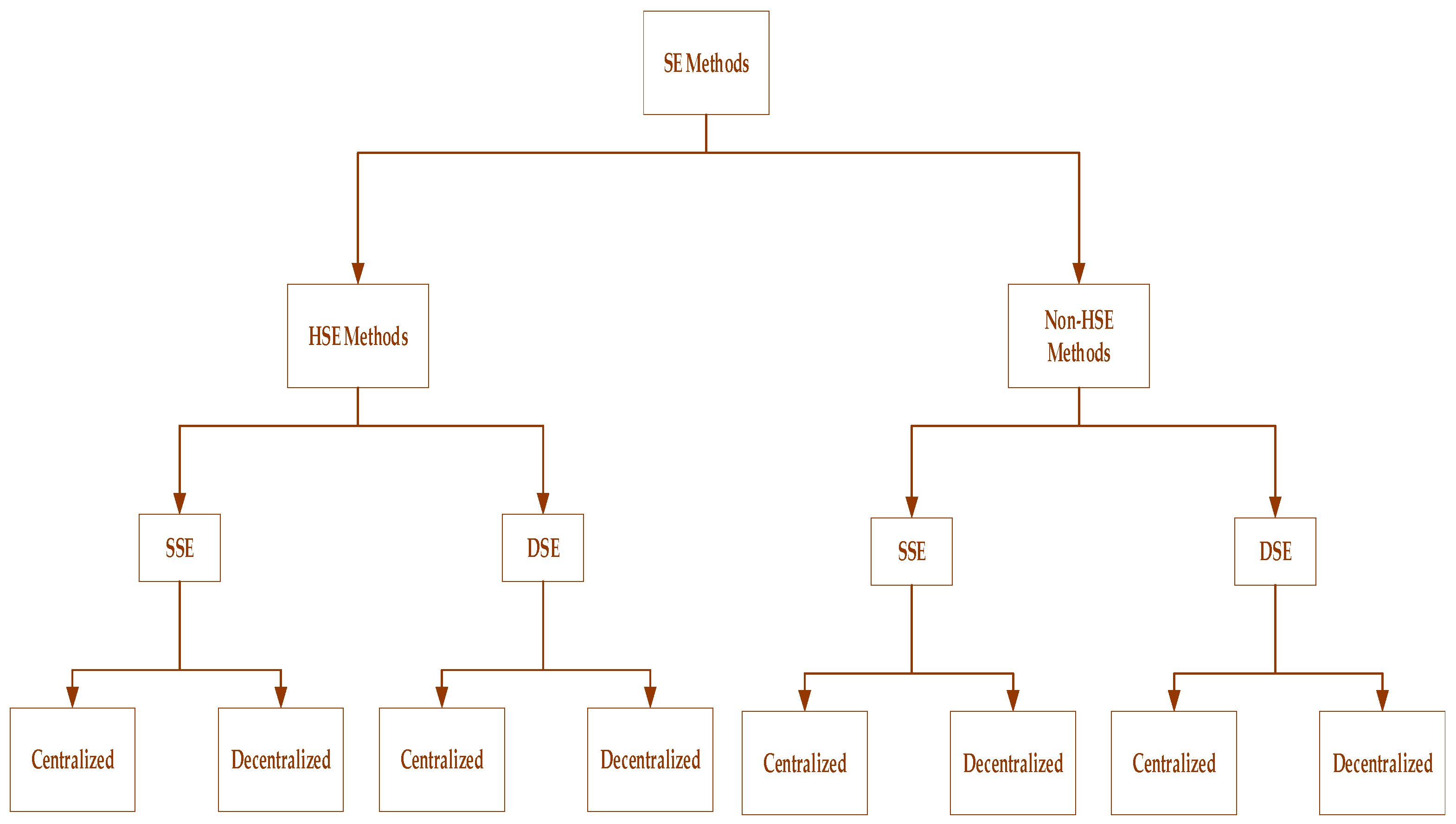
2. State Estimation
2.1. Static State Estimation
2.2. Dynamic State Estimation
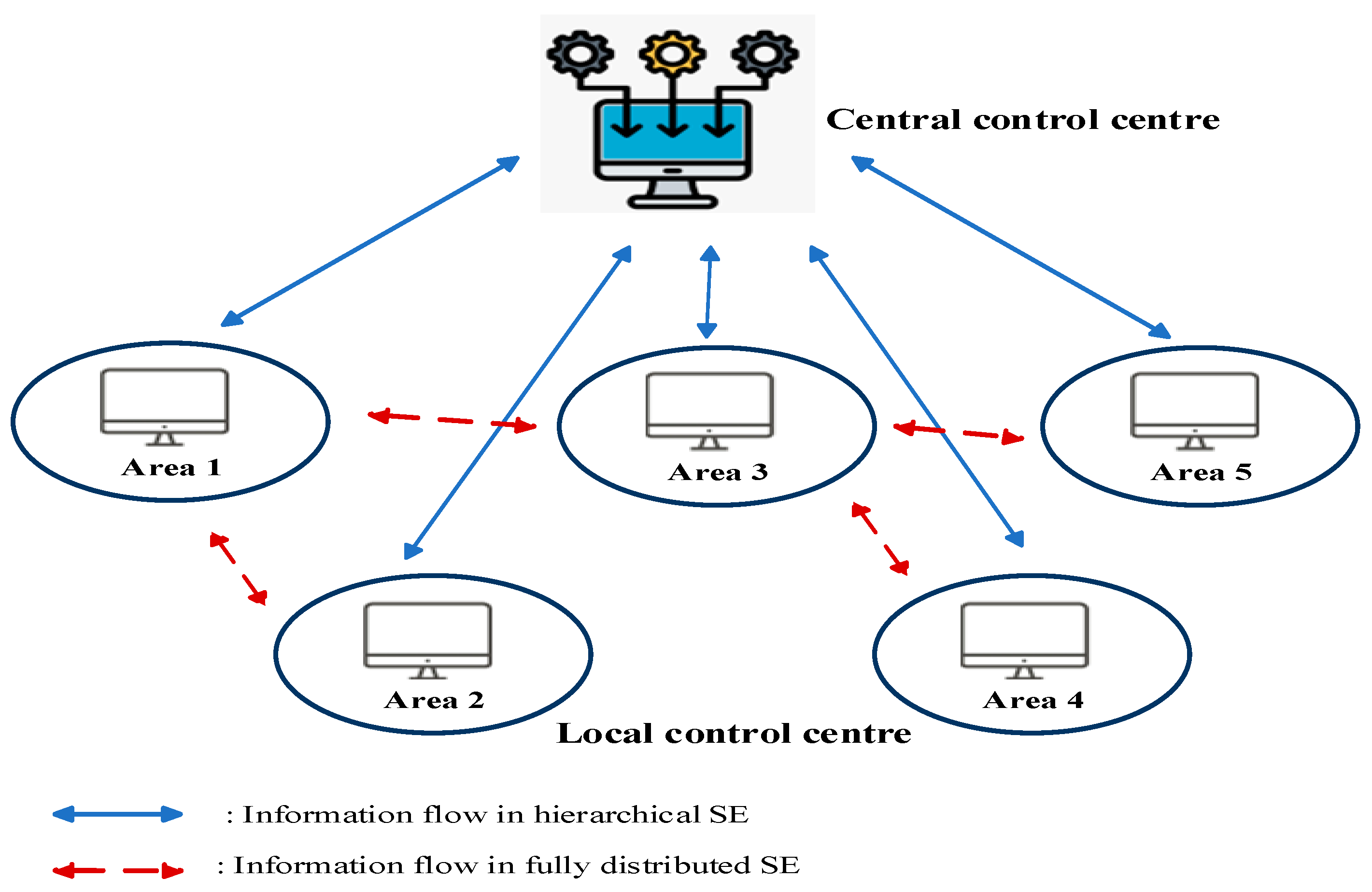
2.2.1. Centralized DSE
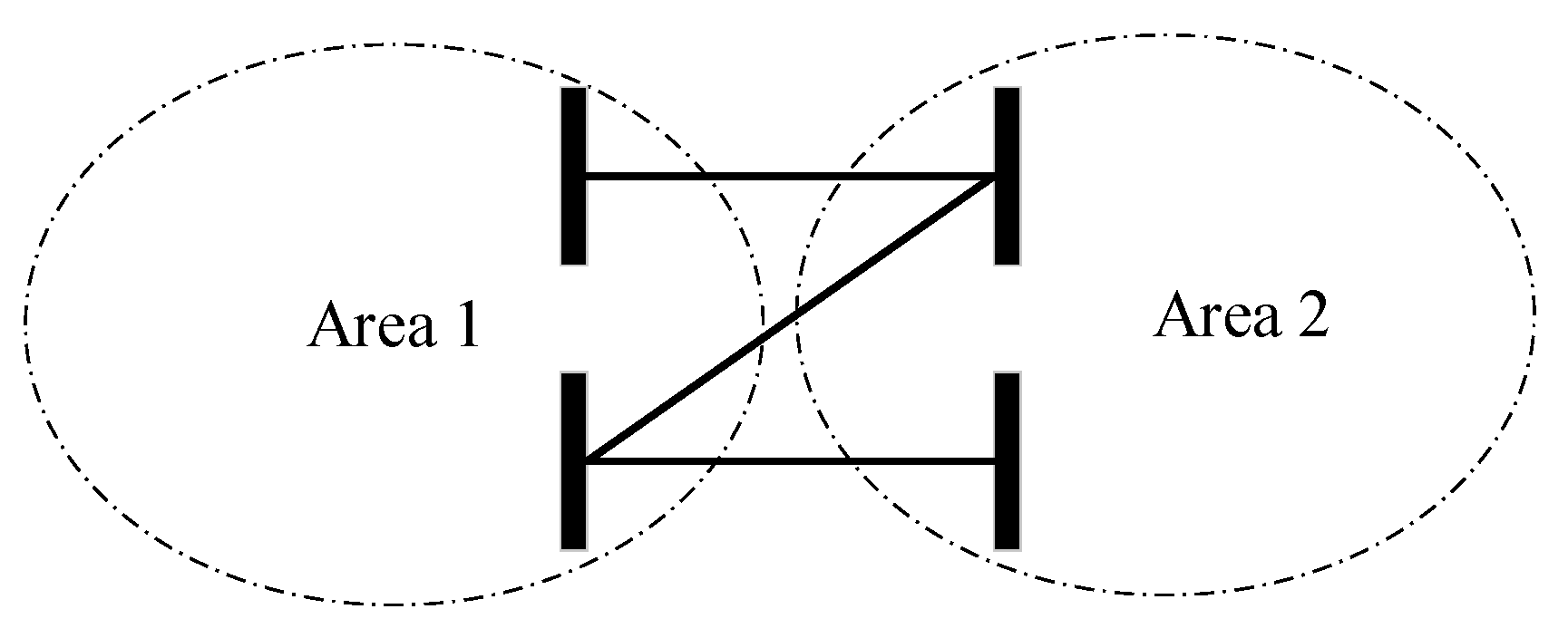
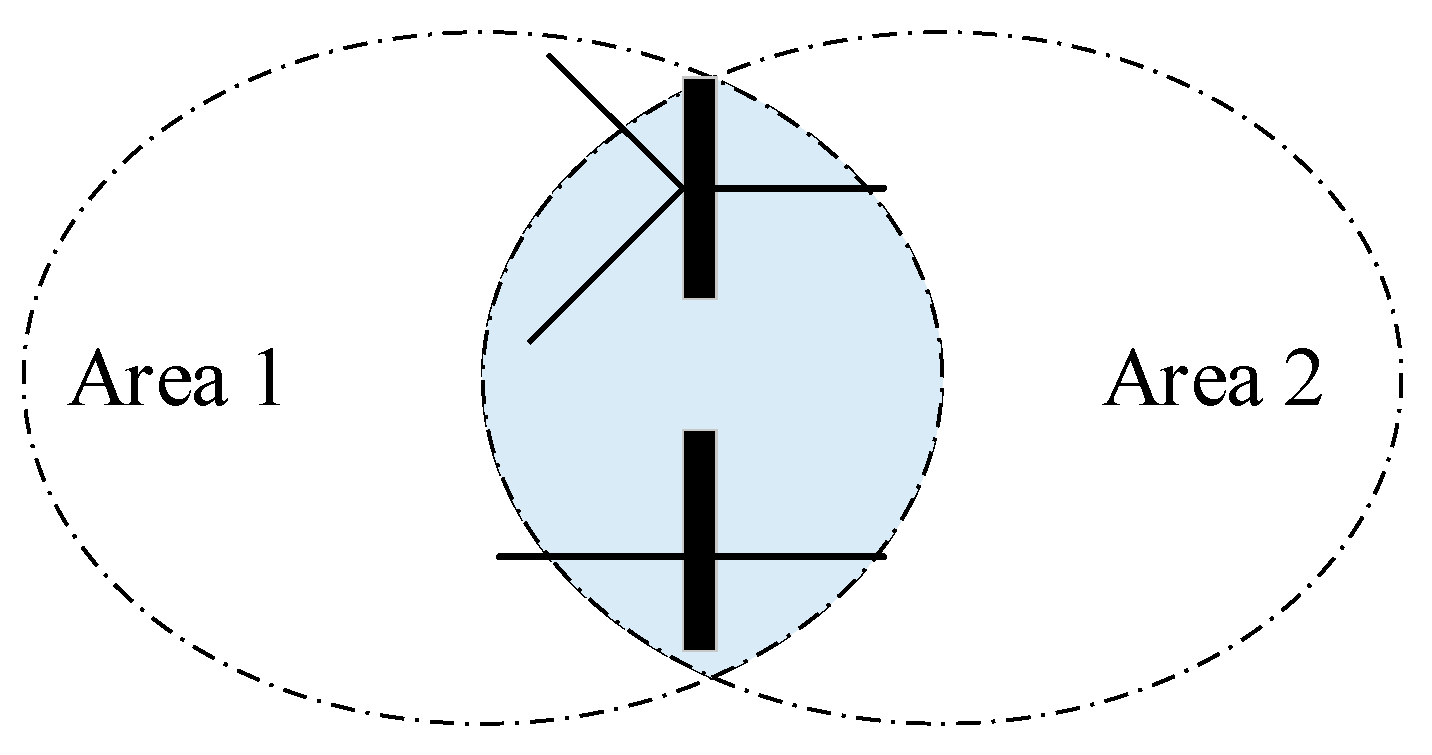
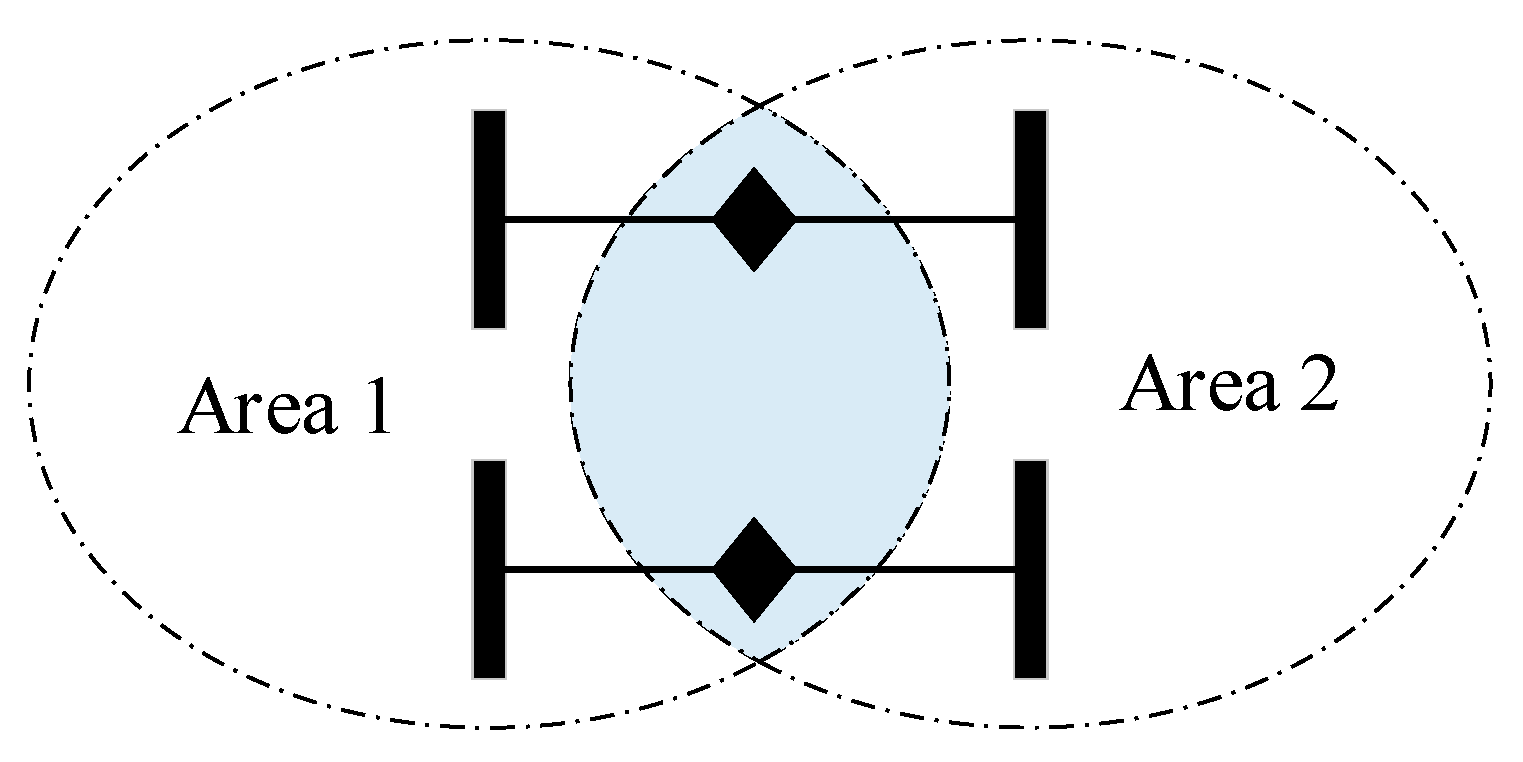
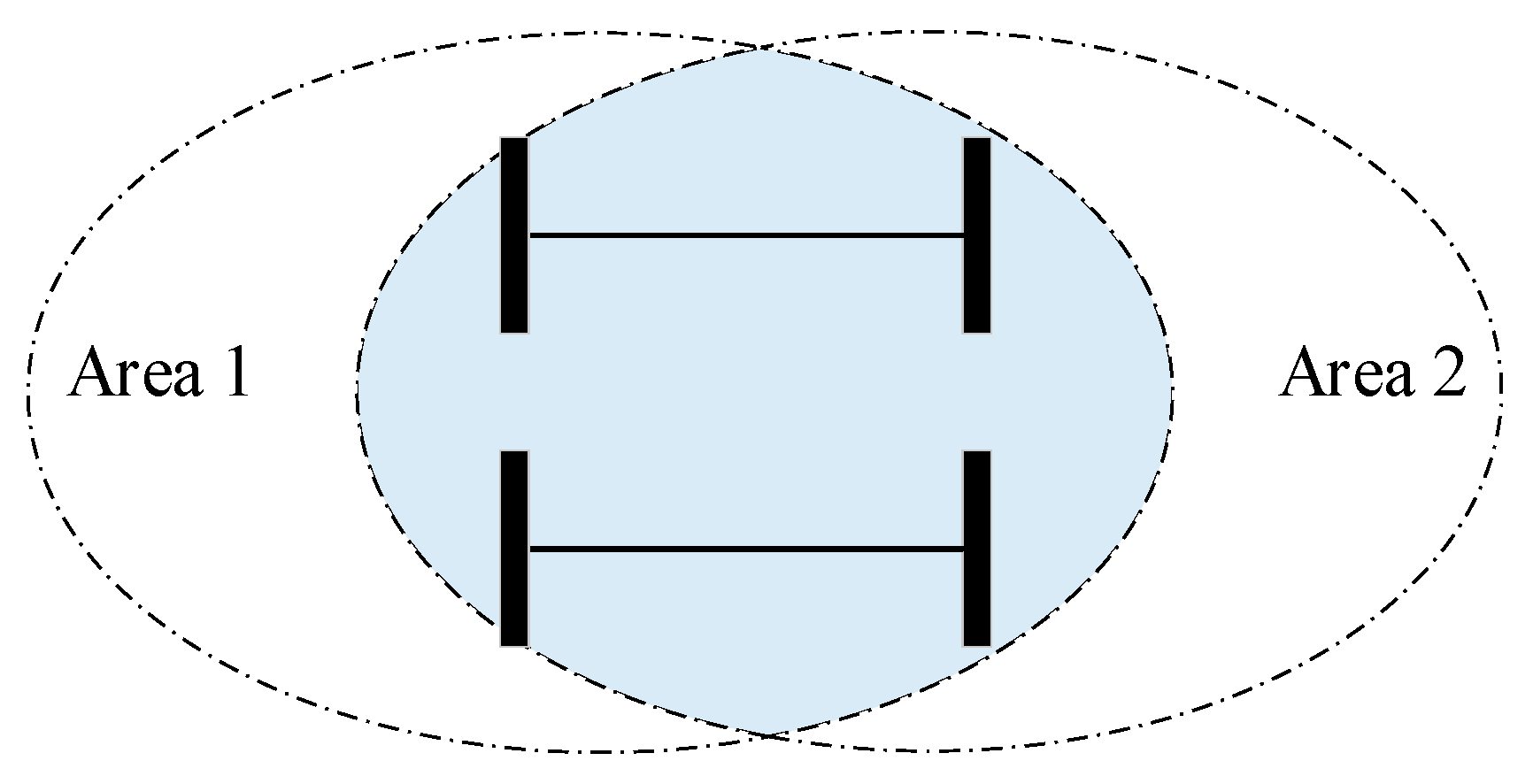
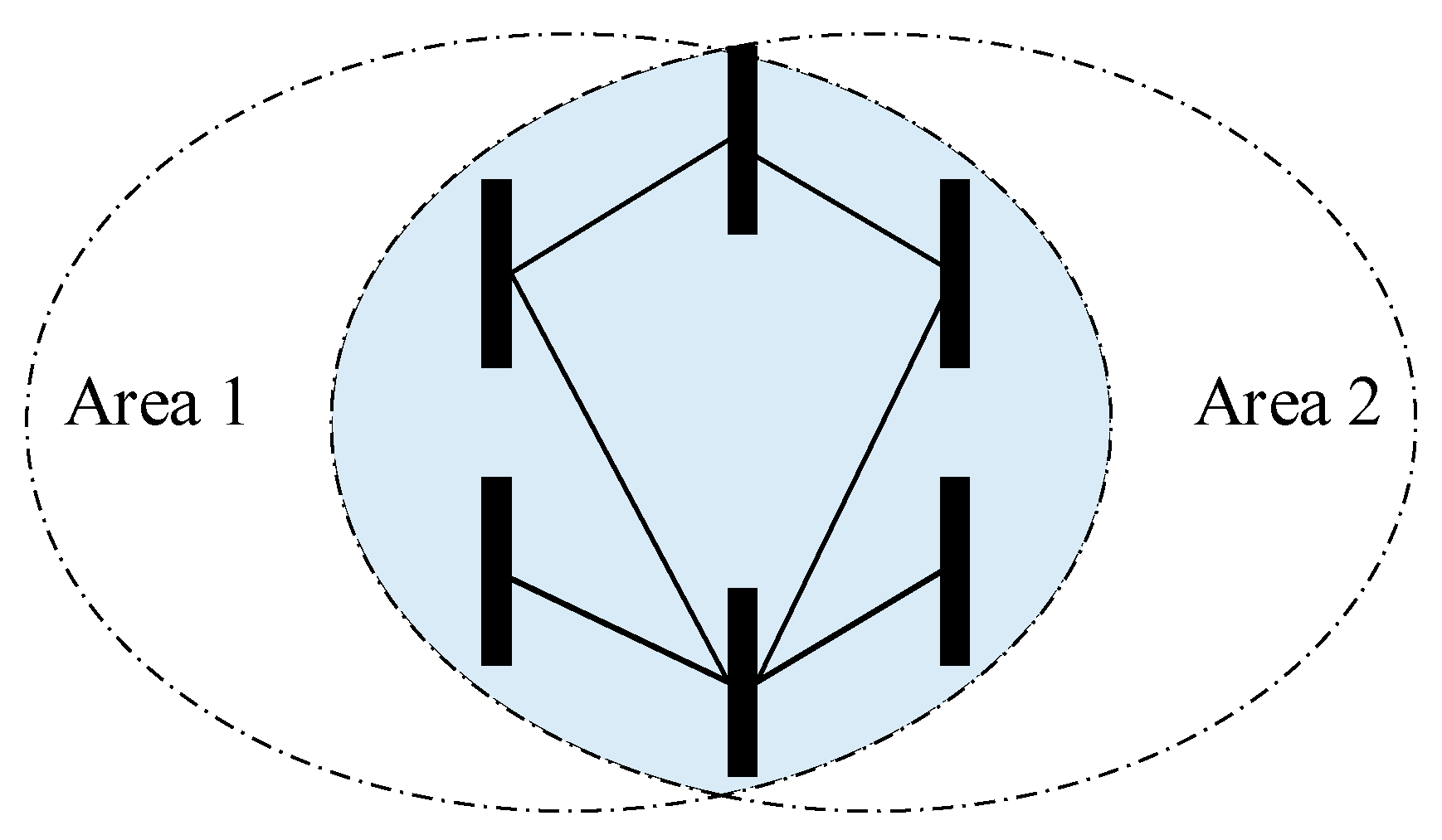
2.2.2. Decentralized DSE
- None-overlapping areas.
- 2.
- Border-bus overlapping areas.
- 3.
- Tie-line overlapping areas.
- 4.
- Deep or extended overlapping areas.
2.3. Hybrid State Estimation
2.3.1. Dynamic Hybrid State Estimation
- Sequential measurement-state fusion.
- 2.
- Parallel state fusion.
- 3.
- Direct measurement fusion.
2.3.2. Static Hybrid State Estimation
3. Conclusions and Future Research Prospects
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Abur, A.; Exposito, A.G. Power System State Estimation: Theory and Implementation; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Darmis, O.; Korres, G. A survey on hybrid SCADA/WAMS state estimation methodologies in electric power transmission systems. Energies 2023, 16, 618. [Google Scholar] [CrossRef]
- Schweppe, F.C. Power system static-state estimation, Part III: Implementation. IEEE Trans. Power Appar. Syst. 1970, 89, 130–135. [Google Scholar] [CrossRef]
- Schweppe, F.C.; Rom, D.B. Power system static-state estimation, Part II: Approximate model. IEEE Trans. Power Appar. Syst. 1970, 89, 125–130. [Google Scholar] [CrossRef]
- Schweppe, F.C.; Wildes, J. Power system static-state estimation, Part I: Exact model. IEEE Trans. Power Appar. Syst. 1970, 120–125. [Google Scholar] [CrossRef]
- Wood, A.J.; Wollenberg, B.F.; Sheblé, G.B. Power Generation, Operation, and Control; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Gómez-Expósito, A.; De La Villa Jaén, A.; Gómez-Quiles, C.; Rousseaux, P.; Van Cutsem, T. A taxonomy of multi-area state estimation methods. Electr. Power Syst. Res. 2011, 81, 1060–1069. [Google Scholar] [CrossRef]
- Zhao, J.; Gómez-Expósito, A.; Netto, M.; Mili, L.; Abur, A.; Terzija, V.; Kamwa, I.; Pal, B.; Singh, A.K.; Qi, J. Power system dynamic state estimation: Motivations, definitions, methodologies, and future work. IEEE Trans. Power Syst. 2019, 34, 3188–3198. [Google Scholar] [CrossRef]
- De La Ree, J.; Centeno, V.; Thorp, J.S.; Phadke, A.G. Synchronized phasor measurement applications in power systems. IEEE Trans. Smart Grid 2010, 1, 20–27. [Google Scholar] [CrossRef]
- Terzija, V.; Valverde, G.; Cai, D.; Regulski, P.; Madani, V.; Fitch, J.; Skok, S.; Begovic, M.M.; Phadke, A. Wide-area monitoring, protection, and control of future electric power networks. Proc. IEEE 2010, 99, 80–93. [Google Scholar] [CrossRef]
- Kamyabi, L.; Esmaeili, S.; Koochi, M.H.R. Power quality monitor placement in power systems considering channel limits and estimation error at unobservable buses using a bi-level approach. Int. J. Electr. Power Energy Syst. 2018, 102, 302–311. [Google Scholar] [CrossRef]
- Phadke, A.G.; Thorp, J.S. Synchronized Phasor Measurements and Their Applications; Springer: Berlin/Heidelberg, Germany, 2008; Volume 1. [Google Scholar]
- Göl, M.; Abur, A. A hybrid state estimator for systems with limited number of PMUs. IEEE Trans. Power Syst. 2014, 30, 1511–1517. [Google Scholar] [CrossRef]
- Cheng, G.; Lin, Y.; Abur, A.; Gómez-Expósito, A.; Wu, W. A survey of power system state estimation using multiple data sources: PMUs, SCADA, AMI, and beyond. IEEE Trans. Smart Grid 2023, 15, 1129–1151. [Google Scholar] [CrossRef]
- Zhou, M.; Centeno, V.A.; Thorp, J.S.; Phadke, A.G. An alternative for including phasor measurements in state estimators. IEEE Trans. Power Syst. 2006, 21, 1930–1937. [Google Scholar] [CrossRef]
- Kabiri, M.; Amjady, N. A new hybrid state estimation considering different accuracy levels of PMU and SCADA measurements. IEEE Trans. Instrum. Meas. 2018, 68, 3078–3089. [Google Scholar] [CrossRef]
- Yohanandhan, R.V.; Elavarasan, R.M.; Manoharan, P.; Mihet-Popa, L. Cyber-physical power system (CPPS): A review on modeling, simulation, and analysis with cyber security applications. IEEE Access 2020, 8, 151019–151064. [Google Scholar] [CrossRef]
- Asefi, S.; Gryazina, E. Advancements in Power System State Estimation: Innovative Algorithms and Solutions for Enhanced Reliability and Efficiency. Ph.D. Thesis, Skolkovo Institute of Science and Technology, Moscow, Russia, 2023. [Google Scholar]
- Thomas, M.S.; McDonald, J.D. Power System SCADA and Smart Grids; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Qu, B.; Wang, Z.; Shen, B. Fusion estimation for a class of multi-rate power systems with randomly occurring SCADA measurement delays. Automatica 2021, 125, 109408. [Google Scholar] [CrossRef]
- Dubey, A.; Chakrabarti, S.; Terzija, V. SCADA and PMU measurement based methods for robust hybrid state estimation. Electr. Power Compon. Syst. 2019, 47, 849–860. [Google Scholar] [CrossRef]
- Singh, R.; Pal, B.C.; Jabr, R. Choice of estimator for distribution system state estimation. IET Gener. Transm. Distrib. 2009, 3, 666. [Google Scholar] [CrossRef]
- Jin, Z. Static and Dynamic State Estimation of Power Systems; The University of Manchester (United Kingdom): Manchester, UK, 2018. [Google Scholar]
- Chatterjee, S.; Chowdhury, A.; Dey, A.; Thakur, S. Adaptive Divided Difference Filter for Power Systems Dynamic State Estimation with Outliers and Unknown Noise Covariance. IEEE Trans. Ind. Appl. 2023, 59, 7529–7544. [Google Scholar] [CrossRef]
- Aminifar, F.; Shahidehpour, M.; Fotuhi-Firuzabad, M.; Kamalinia, S. Power system dynamic state estimation with synchronized phasor measurements. IEEE Trans. Instrum. Meas. 2013, 63, 352–363. [Google Scholar] [CrossRef]
- Valverde, G.; Terzija, V. Unscented Kalman filter for power system dynamic state estimation. IET Gener. Transm. Distrib. 2011, 5, 29–37. [Google Scholar] [CrossRef]
- Hassanzadeh, M.; Evrenosoğlu, C.Y.; Mili, L. A short-term nodal voltage phasor forecasting method using temporal and spatial correlation. IEEE Trans. Power Syst. 2015, 31, 3881–3890. [Google Scholar] [CrossRef]
- Chakrabarti, S.; Kyriakides, E.; Ledwich, G.; Ghosh, A. Inclusion of PMU current phasor measurements in a power system state estimator. IET Gener. Transm. Distrib. 2010, 4, 1104–1115. [Google Scholar] [CrossRef]
- Ahmad, F.; Rasool, A.; Ozsoy, E.; Sekar, R.; Sabanovic, A.; Elitaş, M. Distribution system state estimation-A step towards smart grid. Renew. Sustain. Energy Rev. 2018, 81, 2659–2671. [Google Scholar] [CrossRef]
- Basetti, V.; Chandel, A.K.; Shiva, C.K. Square-root cubature Kalman filter based power system dynamic state estimation. Sustain. Energy Grids Netw. 2022, 31, 100712. [Google Scholar] [CrossRef]
- Shivakumar, N.; Jain, A. A review of power system dynamic state estimation techniques. In Proceedings of the 2008 Joint International Conference on Power System Technology and IEEE Power India Conference, New Delhi, India, 12–15 October 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1–6. [Google Scholar]
- Ghahremani, E.; Kamwa, I. Dynamic state estimation in power system by applying the extended Kalman filter with unknown inputs to phasor measurements. IEEE Trans. Power Syst. 2011, 26, 2556–2566. [Google Scholar] [CrossRef]
- Zhou, N.; Meng, D.; Lu, S. Estimation of the dynamic states of synchronous machines using an extended particle filter. IEEE Trans. Power Syst. 2013, 28, 4152–4161. [Google Scholar] [CrossRef]
- Tebianian, H.; Jeyasurya, B. Dynamic state estimation in power systems: Modeling, and challenges. Electr. Power Syst. Res. 2015, 121, 109–114. [Google Scholar] [CrossRef]
- Rostami, M.; Lotfifard, S. Distributed dynamic state estimation of power systems. IEEE Trans. Ind. Inform. 2017, 14, 3395–3404. [Google Scholar] [CrossRef]
- Tian, G.; Zhou, Q.; Birari, R.; Qi, J.; Qu, Z. A hybrid-learning algorithm for online dynamic state estimation in multimachine power systems. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 5497–5508. [Google Scholar] [CrossRef]
- Ji, X.; Yin, Z.; Zhang, Y.; Wang, M.; Zhang, X.; Zhang, C.; Wang, D. Real-time robust forecasting-aided state estimation of power system based on data-driven models. Int. J. Electr. Power Energy Syst. 2021, 125, 106412. [Google Scholar] [CrossRef]
- Chen, T.; Ren, H.; Li, P.; Amaratunga, G.A. A Robust Dynamic State Estimation Method for Power Systems Using Exponential Absolute Value-Based Estimator. IEEE Trans. Instrum. Meas. 2022, 71, 1–10. [Google Scholar] [CrossRef]
- Li, Z.; Li, S.; Liu, B.; Samson, S.Y.; Shi, P. A stochastic event-triggered robust cubature Kalman filtering approach to power system dynamic state estimation with non-Gaussian measurement noises. IEEE Trans. Control Syst. Technol. 2022, 31, 889–896. [Google Scholar] [CrossRef]
- Gotti, D.; Ledesma, P.; Amaris, H. A fast data-driven topology identification method for dynamic state estimation applications. Int. J. Electr. Power Energy Syst. 2023, 147, 108807. [Google Scholar] [CrossRef]
- Qu, B.; Wang, Z.; Shen, B.; Dong, H. Decentralized dynamic state estimation for multi-machine power systems with non-Gaussian noises: Outlier detection and localization. Automatica 2023, 153, 111010. [Google Scholar] [CrossRef]
- Zhang, J.; Welch, G.; Bishop, G.; Huang, Z. A two-stage Kalman filter approach for robust and real-time power system state estimation. IEEE Trans. Sustain. Energy 2013, 5, 629–636. [Google Scholar] [CrossRef]
- Karimipour, H.; Dinavahi, V. Parallel relaxation-based joint dynamic state estimation of large-scale power systems. IET Gener. Transm. Distrib. 2016, 10, 452–459. [Google Scholar] [CrossRef]
- Pfeifer, M.; Mueller, F.; de Jongh, S.; Gielnik, F.; Leibfried, T.; Hohmann, S. Time-domain Dynamic State Estimation for Unbalanced Three-phase Power Systems. J. Mod. Power Syst. Clean Energy 2022, 11, 446–454. [Google Scholar] [CrossRef]
- Riahinia, S.; Ameli, A.; Ghafouri, M.; Yassine, A. Recursive Least-Square-Based Parameter Estimation for Dynamic State Estimation in Power Grids. In Proceedings of the 2023 IEEE 2nd Industrial Electronics Society Annual Online Conference (ONCON), Virtual, 8–10 December 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar]
- Yuan, L.; Gu, J.; Wen, H.; Jin, Z. Improved particle filter for non-gaussian forecasting-aided state estimation. J. Mod. Power Syst. Clean Energy 2022, 11, 1075–1085. [Google Scholar] [CrossRef]
- Xiao, R.; Wang, G.; Hao, X.; Huang, R.; Xiong, Y. Dynamic state estimation of medium-voltage DC integrated power system with pulse load. J. Mod. Power Syst. Clean Energy 2020, 8, 689–698. [Google Scholar] [CrossRef]
- Challa, K.K.; Gurrala, G. Dynamic state and parameter estimation of synchronous generator from digital relay records. Electr. Power Syst. Res. 2020, 189, 106743. [Google Scholar] [CrossRef]
- Kooshkbaghi, M.; Marquez, H.J.; Xu, W. Event-triggered approach to dynamic state estimation of a synchronous machine using cubature Kalman filter. IEEE Trans. Control Syst. Technol. 2019, 28, 2013–2020. [Google Scholar] [CrossRef]
- Chen, T.; Liu, F.; Luo, H.; Foo, E.Y.; Sun, L.; Sun, Y.; Gooi, H.B. A new robust dynamic state estimation approach for power systems with non-Gaussian noise. Int. J. Electr. Power Energy Syst. 2024, 158, 109948. [Google Scholar] [CrossRef]
- Korres, G.N.; Manousakis, N.M. State estimation and bad data processing for systems including PMU and SCADA measurements. Electr. Power Syst. Res. 2011, 81, 1514–1524. [Google Scholar] [CrossRef]
- Yang, X.; Zhang, X.-P. Fast decoupled multi area state estimation with PMUs measurements. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Washington, DC, USA, 16–20 January 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–7. [Google Scholar]
- Göl, M.; Abur, A. LAV based robust state estimation for systems measured by PMUs. IEEE Trans. Smart Grid 2014, 5, 1808–1814. [Google Scholar] [CrossRef]
- Ren, P.; Abur, A. Obtaining partial solutions for divergent state estimation problems in large power systems. In Proceedings of the 2018 IEEE International Symposium on Circuits and Systems (ISCAS), Florence, Italy, 27–30 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Džafić, I.; Jabr, R.A. Real-time equality-constrained hybrid state estimation in complex variables. Int. J. Electr. Power Energy Syst. 2020, 117, 105634. [Google Scholar] [CrossRef]
- Džafić, I.; Jabr, R.A.; Hrnjić, T. A complex variable perturbed gauss-newton method for tracking mode state estimation. IEEE Trans. Power Syst. 2020, 36, 2594–2602. [Google Scholar] [CrossRef]
- Hossain, M.J.; Naeini, M. Multi-area distributed state estimation in smart grids using data-driven Kalman filters. Energies 2022, 15, 7105. [Google Scholar] [CrossRef]
- Gholami, M.; Tehrani-Fard, A.A.; Lehtonen, M.; Moeini-Aghtaie, M.; Fotuhi-Firuzabad, M. A novel multi-area distribution state estimation approach for active networks. Energies 2021, 14, 1772. [Google Scholar] [CrossRef]
- Conejo, A.J.; de la Torre, S.; Canas, M. An optimization approach to multiarea state estimation. IEEE Trans. Power Syst. 2007, 22, 213–221. [Google Scholar] [CrossRef]
- Kekatos, V.; Giannakis, G.B. Distributed robust power system state estimation. IEEE Trans. Power Syst. 2012, 28, 1617–1626. [Google Scholar] [CrossRef]
- Kurt, M.N.; Yılmaz, Y.; Wang, X. Secure distributed dynamic state estimation in wide-area smart grids. IEEE Trans. Inf. Forensics Secur. 2019, 15, 800–815. [Google Scholar] [CrossRef]
- Su, Q.; Wang, H.; Sun, C.; Li, B.; Li, J. Cyber-attacks against cyber-physical power systems security: State estimation, attacks reconstruction and defense strategy. Appl. Math. Comput. 2022, 413, 126639. [Google Scholar] [CrossRef]
- Zhao, J.; Netto, M.; Mili, L. A robust iterated extended Kalman filter for power system dynamic state estimation. IEEE Trans. Power Syst. 2016, 32, 3205–3216. [Google Scholar] [CrossRef]
- Asefi, S.; Parsegov, S.; Gryazina, E. Distributed state estimation: A novel stopping criterion. arXiv 2020, arXiv:2012.00647. [Google Scholar]
- Zhao, L.; Abur, A. Multi area state estimation using synchronized phasor measurements. IEEE Trans. Power Syst. 2005, 20, 611–617. [Google Scholar] [CrossRef]
- Jiang, W.; Vittal, V.; Heydt, G.T. Diakoptic state estimation using phasor measurement units. IEEE Trans. Power Syst. 2008, 23, 1580–1589. [Google Scholar] [CrossRef]
- Korres, G.N. A distributed multiarea state estimation. IEEE Trans. Power Syst. 2010, 26, 73–84. [Google Scholar] [CrossRef]
- Marelli, D.; Ninness, B.; Fu, M. Distributed weighted least-squares estimation for power networks. IFAC-Pap. 2015, 48, 562–567. [Google Scholar] [CrossRef]
- Minot, A.; Lu, Y.M.; Li, N. A distributed Gauss-Newton method for power system state estimation. IEEE Trans. Power Syst. 2015, 31, 3804–3815. [Google Scholar] [CrossRef]
- Li, X.; Scaglione, A. Robust decentralized state estimation and tracking for power systems via network gossiping. IEEE J. Sel. Areas Commun. 2013, 31, 1184–1194. [Google Scholar] [CrossRef]
- Sharma, A.; Srivastava, S.; Chakrabarti, S. Multi area state estimation using area slack bus angle adjustment with minimal data exchange. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–5. [Google Scholar]
- Guo, Y.; Tong, L.; Wu, W.; Sun, H.; Zhang, B. Hierarchical multi-area state estimation via sensitivity function exchanges. IEEE Trans. Power Syst. 2016, 32, 442–453. [Google Scholar] [CrossRef]
- Xie, L.; Choi, D.-H.; Kar, S.; Poor, H.V. Fully distributed state estimation for wide-area monitoring systems. IEEE Trans. Smart Grid 2012, 3, 1154–1169. [Google Scholar] [CrossRef]
- Chen, T.; Liu, F.; Li, P.; Sun, L.; Amaratunga, G.A. A distributed multi-area power system state estimation method based on generalized loss function. Meas. Sci. Technol. 2023, 34, 115010. [Google Scholar] [CrossRef]
- Murugesan, V.; Chakhchoukh, Y.; Vittal, V.; Heydt, G.T.; Logic, N.; Sturgill, S. PMU data buffering for power system state estimators. IEEE Power Energy Technol. Syst. J. 2015, 2, 94–102. [Google Scholar] [CrossRef]
- Korres, G.; Manousakis, N. State estimation and observability analysis for phasor measurement unit measured systems. IET Gener. Transm. Distrib. 2012, 6, 902–913. [Google Scholar] [CrossRef]
- Asprou, M.; Chakrabarti, S.; Kyriakides, E. A two-stage state estimator for dynamic monitoring of power systems. IEEE Syst. J. 2014, 11, 1767–1776. [Google Scholar] [CrossRef]
- Manousakis, N.M.; Korres, G.N. A hybrid power system state estimator using synchronized and unsynchronized sensors. Int. Trans. Electr. Energy Syst. 2018, 28, e2580. [Google Scholar] [CrossRef]
- Dubey, A.; Chakrabarti, S.; Sharma, A.; Terzija, V. Optimal utilisation of PMU measurements in power system hybrid state estimators. IET Gener. Transm. Distrib. 2019, 13, 4978–4986. [Google Scholar] [CrossRef]
- Huang, M.; Wei, Z.; Sun, G.; Zang, H. Hybrid state estimation for distribution systems with AMI and SCADA measurements. IEEE Access 2019, 7, 120350–120359. [Google Scholar] [CrossRef]
- Švenda, V.G.; Stanković, A.M.; Sarić, A.T.; Transtrum, M.K. Flexible hybrid state estimation for power systems with communication irregularities. IET Gener. Transm. Distrib. 2020, 14, 2111–2119. [Google Scholar] [CrossRef]
- He, X.; Li, C.; Du, M.; Dong, H.; Li, P. Hybrid measurements-based fast state estimation for power distribution system. IEEE Access 2021, 9, 21112–21122. [Google Scholar] [CrossRef]
- Moshtagh, S.; Rahmani, M. Robust hybrid state estimation for power systems utilizing Phasor measurements units. Electr. Power Syst. Res. 2021, 196, 107195. [Google Scholar] [CrossRef]
- Ortiz, G.; Rehtanz, C.; Colomé, G. Monitoring of power system dynamics under incomplete PMU observability condition. IET Gener. Transm. Distrib. 2021, 15, 1435–1450. [Google Scholar] [CrossRef]
- Kirincic, V.; Skok, S.; Terzija, V. A two-step hybrid power system state estimator. Int. Trans. Electr. Energy Syst. 2015, 25, 1158–1172. [Google Scholar] [CrossRef]
- Du, J.; Ma, S.; Wu, Y.-C.; Poor, H.V. Distributed hybrid power state estimation under PMU sampling phase errors. IEEE Trans. Signal Process. 2014, 62, 4052–4063. [Google Scholar] [CrossRef]
- Hu, J.; Wang, Q.; Ye, Y.; Tang, Y. High-Resolution Real-time Power Systems State Estimation: A Combined Physics-embedded and Data-driven Perspective. IEEE Trans. Power Syst. 2024, 1–14. [Google Scholar] [CrossRef]
- Karimipour, H.; Dinavahi, V. Extended Kalman filter-based parallel dynamic state estimation. IEEE Trans. Smart Grid 2015, 6, 1539–1549. [Google Scholar] [CrossRef]
- Costa, A.S.; Albuquerque, A.; Bez, D. An estimation fusion method for including phasor measurements into power system real-time modeling. IEEE Trans. Power Syst. 2013, 28, 1910–1920. [Google Scholar] [CrossRef]
- Wu, T.; Chung, C.Y.; Kamwa, I. A fast state estimator for systems including limited number of PMUs. IEEE Trans. Power Syst. 2017, 32, 4329–4339. [Google Scholar] [CrossRef]
- Zhao, J.; Mili, L. A framework for robust hybrid state estimation with unknown measurement noise statistics. IEEE Trans. Ind. Inform. 2017, 14, 1866–1875. [Google Scholar] [CrossRef]
- Ascari, L.; Simoes Costa, A.; Miranda, V. Correntropy-based fusion strategy for incorporating pmu measurements into power system state estimation. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Ban, J.; Im, J.; Kim, Y.-J.; Zhao, J. Decentralization of phasor-aided state estimation using local state vector extension. IEEE Trans. Power Syst. 2021, 36, 4645–4659. [Google Scholar] [CrossRef]
- Ghosal, M.; Rao, V. Fusion of PMU and SCADA data for dynamic state estimation of power system. In Proceedings of the 2015 North American Power Symposium (NAPS), Charlotte, NC, USA, 4–6 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–6. [Google Scholar]
- Ghosal, M.; Rao, V. Fusion of multirate measurements for nonlinear dynamic state estimation of the power systems. IEEE Trans. Smart Grid 2017, 10, 216–226. [Google Scholar] [CrossRef]
- Jain, A.; Shivakumar, N. Impact of PMU in dynamic state estimation of power systems. In Proceedings of the 2008 40th North American Power Symposium, Calgary, AB, Canada, 28–30 September 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1–8. [Google Scholar]
- Simon, D. Kalman h-infinity and nonlinear approaches. In Optimal State Estimation; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Das, K.; Hazra, J.; Seetharam, D.P.; Reddi, R.K.; Sinha, A.K. Real-time hybrid state estimation incorporating SCADA and PMU measurements. In Proceedings of the 2012 3rd IEEE PES Innovative Smart Grid Technologies Europe (ISGT Europe), Berlin, Germany, 14–17 October 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–8. [Google Scholar]
- Albuquerque, A.; Bez, D.; Simões, A. Multistage strategies to incorporate phasor measurements into power system state estimation. In Proceedings of the 2013 IREP Symposium Bulk Power System Dynamics and Control-IX Optimization, Security and Control of the Emerging Power Grid, Crete, Greece, 25–30 August 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–11. [Google Scholar]
- Zhao, J.; Zhang, G.; Das, K.; Korres, G.N.; Manousakis, N.M.; Sinha, A.K.; He, Z. Power system real-time monitoring by using PMU-based robust state estimation method. IEEE Trans. Smart Grid 2015, 7, 300–309. [Google Scholar] [CrossRef]
- Hamidi, R.J.; Khodabandelou, H.; Livani, H.; Sami-Fadali, M. Hybrid state estimation using distributed compressive sensing. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–5. [Google Scholar]
- Özsoy, B.; Göl, M. A hybrid state estimation strategy with optimal use of pseudo-measurements. In Proceedings of the 2018 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Sarajevo, Bosnia and Herzegovina, 21–25 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Li, J.; Gao, M.; Liu, B.; Cai, Y. Forecasting Aided Distribution Network State Estimation Using Mixed μPMU-RTU Measurements. IEEE Syst. J. 2022, 16, 6524–6534. [Google Scholar] [CrossRef]
- Thorp, J.; Phadke, A.; Karimi, K. Real time voltage-phasor measurement for static state estimation. IEEE Trans. Power Appar. Syst. 1985, 3098–3106. [Google Scholar] [CrossRef]
- Zivanovic, R.; Cairns, C. Implementation of PMU technology in state estimation: An overview. Proc. IEEE. AFRICON’96 1996, 2, 1006–1011. [Google Scholar]
- Bi, T.; Qin, X.; Yang, Q. A novel hybrid state estimator for including synchronized phasor measurements. Electr. Power Syst. Res. 2008, 78, 1343–1352. [Google Scholar] [CrossRef]
- Korres, G.N.; Manousakis, N.M. A state estimator including conventional and synchronized phasor measurements. Comput. Electr. Eng. 2012, 38, 294–305. [Google Scholar] [CrossRef]
- Zhu, J.; Gao, W.; Li, Y.; Guo, X.; Zhang, G.; Sun, W. Power System State Estimation Based on Fusion of PMU and SCADA Data. Energies 2024, 17, 2609. [Google Scholar] [CrossRef]
- Khamis, A.; Naidu, D.S. Real-time algorithm for nonlinear systems with incomplete state information using finite-horizon optimal control technique. In Proceedings of the 2014 7th International Symposium on Resilient Control Systems (ISRCS), Denver, CO, USA, 19–21 August 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–6. [Google Scholar]
- Weng, Y.; Negi, R.; Ilić, M.D. Historical data-driven state estimation for electric power systems. In Proceedings of the 2013 IEEE International Conference on Smart Grid Communications (SmartGridComm), Vancouver, BC, Canada, 21–24 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 97–102. [Google Scholar]
- Weng, Y.; Negi, R.; Faloutsos, C.; Ilić, M.D. Robust data-driven state estimation for smart grid. IEEE Trans. Smart Grid 2016, 8, 1956–1967. [Google Scholar] [CrossRef]
- Weng, Y.; Negi, R.; Ilić, M.D. Probabilistic joint state estimation for operational planning. IEEE Trans. Smart Grid 2017, 10, 601–612. [Google Scholar] [CrossRef]
- Song, Q.; Shepperd, M. Missing data imputation techniques. Int. J. Bus. Intell. Data Min. 2007, 2, 261–291. [Google Scholar] [CrossRef]
- Le, N.T.; Benjapolakul, W. A data imputation model in phasor measurement units based on bagged averaging of multiple linear regression. IEEE Access 2018, 6, 39324–39333. [Google Scholar] [CrossRef]
- Ayad, A.; Farag, H.E.; Youssef, A.; El-Saadany, E.F. Detection of false data injection attacks in smart grids using recurrent neural networks. In Proceedings of the 2018 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Sarajevo, Bosnia and Herzegovina, 21–25 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Gupta, A.; Gurrala, G.; Sastry, P. An online power system stability monitoring system using convolutional neural networks. IEEE Trans. Power Syst. 2018, 34, 864–872. [Google Scholar] [CrossRef]
- Ma, Z.; Li, H.; Weng, Y.; Blasch, E.; Zheng, X. Hd-Deep-EM: Deep Expectation Maximization for Dynamic Hidden State Recovery Using Heterogeneous Data. IEEE Trans. Power Syst. 2023, 39, 3575–3587. [Google Scholar] [CrossRef]
- Guo, Y.; Wu, W.; Zhang, B.; Sun, H. A distributed state estimation method for power systems incorporating linear and nonlinear models. Int. J. Electr. Power Energy Syst. 2015, 64, 608–616. [Google Scholar] [CrossRef]
- Karimipour, H.; Dinavahi, V. Parallel domain decomposition based distributed state estimation for large-scale power systems. In Proceedings of the 2015 IEEE/IAS 51st Industrial & Commercial Power Systems Technical Conference (I&CPS), Calgary, AB, Canada, 5–8 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar]
- Yang, T.; Sun, H.; Bose, A. Transition to a two-level linear state estimator—Part II: Algorithm. IEEE Trans. Power Syst. 2010, 26, 54–62. [Google Scholar] [CrossRef]
- Rathod, N.; Patel, H.; Joshi, S. Implementing two stage hybrid state estimation with various approaches. In Proceedings of the 2020 International Conference on Smart Grids and Energy Systems (SGES), Perth, Australia, 23–26 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 627–632. [Google Scholar]
- Bez, D.M.; Costa, A.S.; Ascari, L.B.; Junior, E.Z. A block version of orthogonal rotations for improving the accuracy of hybrid state estimators. IEEE Trans. Power Syst. 2020, 35, 4432–4444. [Google Scholar] [CrossRef]
- Darmis, O.; Korres, G.N. A Hybrid Power System State Estimator Under Limited PMU Availability. IEEE Trans. Power Syst. 2024, 1–13. [Google Scholar] [CrossRef]
- Dobakhshari, A.S.; Abdolmaleki, M.; Terzija, V.; Azizi, S. Robust hybrid linear state estimator utilizing SCADA and PMU measurements. IEEE Trans. Power Syst. 2020, 36, 1264–1273. [Google Scholar] [CrossRef]
- Jovicic, A.; Jereminov, M.; Pileggi, L.; Hug, G. Enhanced modelling framework for equivalent circuit-based power system state estimation. IEEE Trans. Power Syst. 2020, 35, 3790–3799. [Google Scholar] [CrossRef]
- Valverde, G.; Chakrabarti, S.; Kyriakides, E.; Terzija, V. A constrained formulation for hybrid state estimation. IEEE Trans. Power Syst. 2010, 26, 1102–1109. [Google Scholar] [CrossRef]
- Jovicic, A.; Hug, G. Linear state estimation and bad data detection for power systems with RTU and PMU measurements. IET Gener. Transm. Distrib. 2020, 14, 5675–5684. [Google Scholar] [CrossRef]
- Khalili, R.; Abur, A. Iterative linear state estimation using a limited number of PMU measurements. In Proceedings of the 2021 IEEE Madrid PowerTech, Madrid, Spain, 28 June–2 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Zhao, J. Dynamic state estimation with model uncertainties using H∞ extended kalman filter. IEEE Trans. Power Syst. 2017, 33, 1099–1100. [Google Scholar] [CrossRef]
- Rouhani, A.; Abur, A. Constrained iterated unscented Kalman filter for dynamic state and parameter estimation. IEEE Trans. Power Syst. 2017, 33, 2404–2414. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Z.; Wang, Y.; Dinavahi, V.; Liang, J.; Wang, K. Robust dynamic state estimation for power system based on adaptive cubature Kalman filter with generalized correntropy loss. IEEE Trans. Instrum. Meas. 2022, 71, 1–11. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Challenges | References |
|---|---|---|
| Centralized DSE | - It is prone to communication problems and single points of failure. - It might be difficult to handle massive amounts of data from sensors and measurement devices. - It is vulnerable to cyber attacks. | [1,59,60,61,62] |
| Category | Challenges | References |
|---|---|---|
| Decentralized DSE | - To have reliable estimation, it is important to employ an accurate and fast SE algorithm. - It is imperative to control the amount of data exchange between sub-areas to computational burdens and communication resources. | [60,64,69,73,74] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kamyabi, L.; Lie, T.T.; Madanian, S.; Marshall, S. A Comprehensive Review of Hybrid State Estimation in Power Systems: Challenges, Opportunities and Prospects. Energies 2024, 17, 4806. https://doi.org/10.3390/en17194806
Kamyabi L, Lie TT, Madanian S, Marshall S. A Comprehensive Review of Hybrid State Estimation in Power Systems: Challenges, Opportunities and Prospects. Energies. 2024; 17(19):4806. https://doi.org/10.3390/en17194806
Chicago/Turabian StyleKamyabi, Leila, Tek Tjing Lie, Samaneh Madanian, and Sarah Marshall. 2024. "A Comprehensive Review of Hybrid State Estimation in Power Systems: Challenges, Opportunities and Prospects" Energies 17, no. 19: 4806. https://doi.org/10.3390/en17194806