
Optimizing Capacities of Distributed Generation and Energy Storage in a Small Autonomous Power System Considering Uncertainty in Renewables

Abstract
:1. Introduction
- (a)
- Most of the aforementioned studies address only one (reliability, optimization or enumeration methods) approach to optimizing the capacities of distributed generation resources. Although the work of Lujano-Rojas considered both optimal investment and reliability [12], detailed treatment was not given. The cost of loss of load was considered in Kaviani’s [13] and Chen’s works [14]; however, it is difficult to gain the cost of loss of load. Borhanazad’s work is improper from the perspectives of mathematics because two equal weighting factors were assigned to the cost and reliability index in [15]. The disadvantages in the Sharafi and ELMekkawy’s method are that the upper limits of three individual objectives have to be given heuristically [16]. These limitations arise from the fact that the application of two of these methods becomes very complex.
- (b)
- (c)
- The load and power generated by renewables are uncertain. Traditional approaches yield only deterministic solutions [3,4,5,6,7,8,9,13,14,15,16,17,18] because probability operations are very complex. Although some works concerned the uncertainties in renewable energies, their treatments were simplified [10,11,12]. Cabral et al. only utilized the average power output obtained by the maximum power of the PV generator and the probability density function (PDF) [10]. In order to simplify the calculation embedded in the optimization, Lujano-Rojas et al. used artificial neural networks in order to avoid Monte Carlo simulations [11]. Lujano-Rojas et al. also investigated the hourly average wind speed obtained by complex autoregressive moving average (ARMA) model and two algorithms to evaluate the inverse of cumulative distribution function (CDF) [12]. However, simplified average wind speed/power [10,12] may lead to inaccurate results; a complex but approximate method like [11] needs many computation times. Thus, efficient computation is needed to avoid complex probabilistic calculations and maintain acceptable accuracy.
- (d)
- Restrictions on greenhouse gas emissions are critical in both large grids and small autonomous power systems [1,2]. According to electricity acts in different countries, the restrictions of fuel emissions are allocated to the supply participants in the power market. Most works have not considered this factor [3,4,5,6,7,8,9,10,11,12,13,14,15,17,18] except for Sharafi and ELMekkawy’s work [16].
- (a)
- The factors of cost, reliability and fuel emission are considered simultaneously. Only cost is adopted in the objective function while both reliability and fuel emission are dealt easily with inequality constraints. In the above reviewed works, only Sharafi and ELMekkawy’s method considered all three factors using three individual objectives with heuristic upper bounds [16].
- (b)
- The load, wind power and PV power are modeled with random variables. This work uses cumulants of random variables incorporating with the Gram-Charlier series expansion to model the uncertainty in the optimization algorithm. The proposed method may assign the value of cumulative probability as a representative for the corresponding random variable. However, the works in [10,11,12] simplified the calculation of uncertainties using average quantities or ANN estimations.
- (c)
- The deterministic and stochastic results are compared and analyzed. It will be shown that the deterministic study yields a pessimistic solution with the largest cost among all approaches; large cumulative probabilities for renewable generations yield an optimistic solution.
2. Problem Formulation
2.1. Assumptions
- (1)
- The system peak demand is small, of the order of several hundreds of kW. In this paper, the peak load in the small autonomous power system is 150 kW.
- (2)
- The system voltage level is low and the topology of the system is simple. In general, many feeders are connected to a single bus that supplies electric power to local customers.
- (3)
- The losses in the transformers and feeders are very small and can be ignored.
- (4)
- The infeasible voltage and line flow problems that are caused by outages can be neglected because only normal operating conditions are considered.
- (5)
- Historical meteorological data are available and meteorological conditions will be the same in the future (to the planning horizon). This assumption has been made in many existing works [4,5,6,7,9,15,16,17], and holds true when historical meteorological data over many years are considered. One year data are considered herein. Since the historical meteorological data are utilized, they are modeled as random variables with uncertainties. Meteorological data on wind speed and irradiation are converted into hourly wind power and PV power with uncertainties, respectively.
- (6)
- The future load profile is known. The IEEE 8760 h Reliability Test Data, which have been used elsewhere [3,13,22], is used. Owing to the load prediction, the hourly loads are modeled as random variables with uncertainties. This test system was developed in order to assess different reliability modeling and evaluation methodologies for the educational purpose [22]. The load profile in a year reflects the characteristics of power consumptions in different seasons, weekdays and weekends, days and nights, and even holidays. The test system provides ratios of loads at all hours with respect to the largest load, which is 150 kW in this paper. With these ratios, the load profile for 8760 h can be evaluated. This test system was also used in sizing the capacities of renewables in an autonomous power system in [3,13].
- (7)
- Reliability is quantified using the LOLP. The value of LOLP is specified by the supply quality to the customers. For example, LOLP = 0.01 means that the customers can only accept 87.6 h power shortage in a year. The maximum power generation of diesel generators and other distributed generation resources can be simplified by (1 − μ) × rating where the symbol μ is the unavailability. The unavailability can be ignored by setting μ = 0.
- (8)
- The unit sizes of distributed generation resources and ES are given. Those unit sizes are determined by the existing commercial sizes. Moreover, the unit sizes of diesel generator and wind turbine cannot be too large owing to transient stability problems in the power system. When a single large generator (like diesel generator and WTG) is in a condition of unplanned outage in a small power system, the inertias of the remaining diesel-based synchronous generators may be too small to stabilize the system frequency. A common practice to solve this problem is to impose a planning constraint on the unit sizes of diesel generators and WTG. This issue was also addressed in [3].
- (9)
- To simplify the study, only one year data (i.e., 8760 h) are concerned. That is, all powers from WTG, PV, ES and diesel generators, as well as loads, have individual 8760 values. The fuel cost of diesel generator in one year is evaluated herein. This proposed method may be extended to consider the annualized costs for the WTG, PV, ES and diesel generator using suitable life expectancy estimation models [13,14,15,16]. The replacement cost of ES is also needed to be estimated while suitable life expectancy estimation models are concerned. This can be achieved by modifying the cost coefficients by considering the net present cost and capital recovery factor without changing the proposed algorithm. Some other works also used one-year data without considering the lifetime of WTG, PV, ES, and diesel generator (see Table 1 in [16]).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean of Load (kW) | k1 | k2 | k3~k8 | Standard Deviation (kW) |
|---|---|---|---|---|
| 10 | 10 | 1 | 0 | 0.333 |
| 50 | 50 | 5 | 0 | 1.667 |
| 100 | 100 | 10 | 0 | 3.333 |
| 150 | 150 | 15 | 0 | 5.000 |
2.2. Optimization
2.2.1. Objective Function
2.2.2. Inequality Constraints
- (a)
- Nw, Npv, Nes and Nd must be smaller than their corresponding maximum limits ( and ), which are determined by the spaces needed for installation of these distributed generation resources and ES.
- (b)
- Reliability limit (loss of load probability):LOLP ≤ LOLPmax
- (c)
- Greenhouse gas emission limit:CO2 ≤ CO2max
- (d)
- State of charge (SOC) in the ES:SOCmin ≤ SOC(h) ≤ SOCmax
2.3. Estimation of SOC
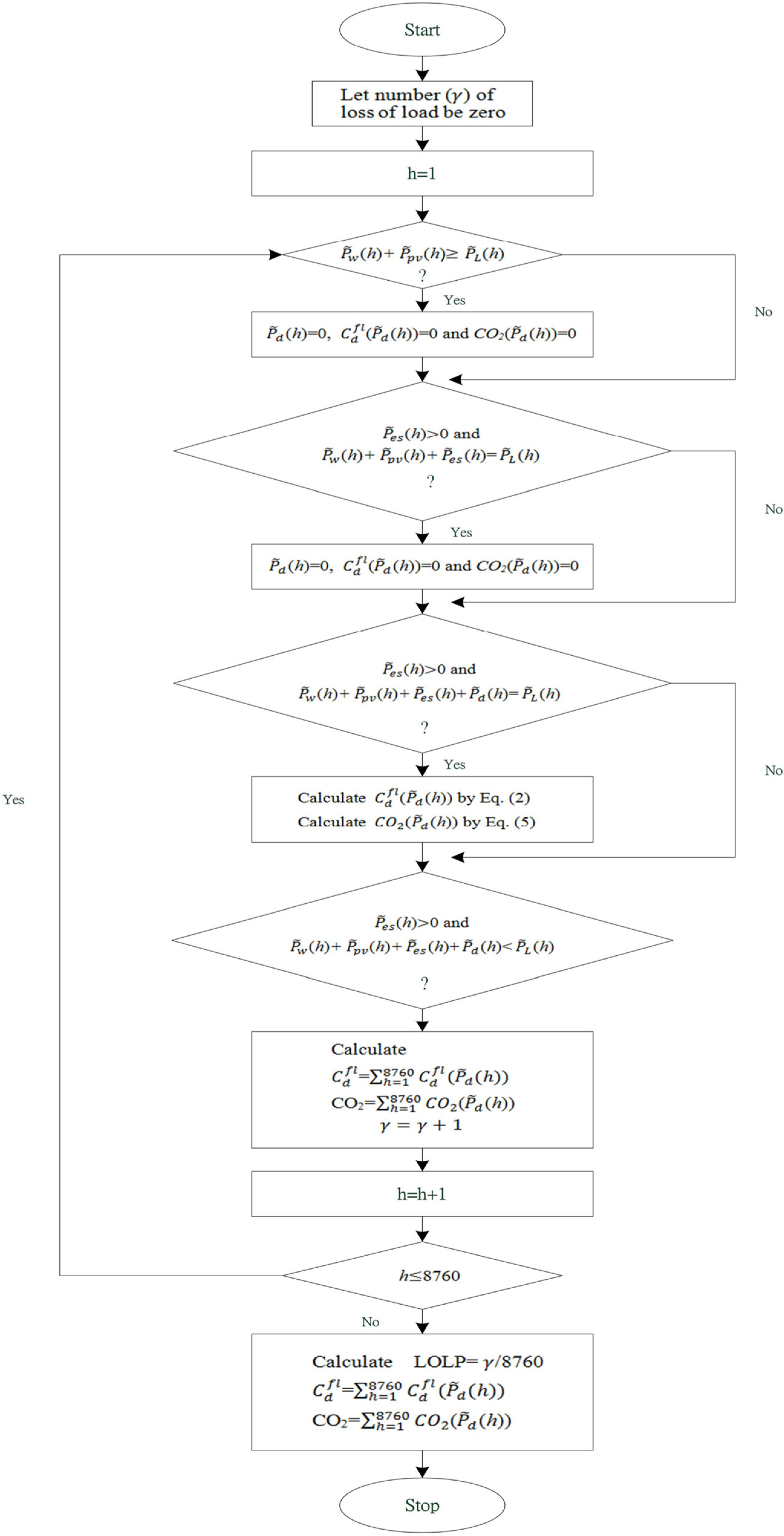
2.4. Estimation of LOLP and CO2 Emission
3. Proposed Method
3.1. Moment and Cumulant
3.2. Cumulant Effect
3.3. Expression of PDF Using Gram-Charlier Series Expansion
3.4. Cumulative Probability
3.5. Genetic Algorithm
3.5.1. Crossover Operation

3.5.2. Mutation Operation
3.5.3. Penalty Functions
3.6. Steps of Algorithm
- Step 1
- Specify historical/hourly loads, wind speed, radiation/temperature using their corresponding PDFs. Read fuel coefficients and emission coefficients in Equations (2) and (5), respectively. Read operational limits, as well as reliability and limits on the emissions of greenhouse gases.
- Step 2
- Compute all cumulants of chronological , and , h = 1, 2, …, 8760.
- Step 3
- Specify the population size (p = 1, 2, …, P), crossover rate and mutation rate in the GA. Define Equation (1) as the fitness in the GA. Encode all chromosomes.
- Step 4
- Conduct the crossover and mutation operations according to Figure 2 and Equation (14), respectively, on all of the chromosomes in the mating pool.
- Step 5
- Decode all of the chromosomes and compute their corresponding fitness functions. Let p = 1.
- Step 6
- Compute all cumulants of hourly , and .
- Step 7
- Execute the steps shown in Figure 1 using the cumulant effect in Section 3.2 and the Gram-Charlier series expansion in Section 3.3 to gain the hourly fuel cost and emission of CO2. Compute the LOLP.
- Step 8
- If emission of CO2 or LOLP violate Equation (3) or Equation (4), respectively, then add the corresponding penalty term to the fitness. Let p = p + 1.
- Step 9
- If p = P, then conduct the roulette wheel selection based on all fitness values plus their corresponding penalty terms to identify better chromosomes for the next generation (iteration); otherwise, go to Step 6.
- Step 10
- If the termination criterion in GA is fulfilled, then stop; otherwise, go to Step 4.
4. Simulation Results
4.1. Test Data
| Cumulants | k1 | k2 | k3 | k4 | k5 | k6 | k7 | k8 | κ | c | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean Value (kW) | |||||||||||
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 1 | 1 | 0.29 | 0.11 | 0.03 | −0.01 | −0.03 | −0.01 | 0.02 | 1.92 | 1.13 | |
| 2 | 1.95 | 1.09 | 0.52 | −0.38 | −1.75 | −1.47 | 9.42 | 38.81 | 1.92 | 2.25 | |
| 3 | 2.27 | 1.98 | −0.10 | −3.80 | 1.70 | 34.97 | −40.62 | −721.60 | 1.92 | 3.38 | |
| 4 | 2.02 | 2.78 | 0.47 | −10.69 | −5.73 | 187.24 | 202.24 | −7127.65 | 1.92 | 4.51 | |
| 5 | 1.65 | 3.08 | 2.43 | −12.92 | −46.77 | 205.74 | 1972.06 | −5151.88 | 1.92 | 5.64 | |
| Cumulants | k1 | k2 | k3 | k4 | k5 | k6 | k7 | k8 | κ | c | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean Value (kW) | |||||||||||
| 1 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 2.09 | 1.13 | |
| 2 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 2.09 | 2.26 | |
| 3 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 2.09 | 3.39 | |
| 4 | 0.71 | 0.13 | 0.03 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 2.09 | 4.52 | |
| 5 | 1.96 | 0.97 | 0.55 | 0.14 | −0.35 | −0.62 | 0.34 | 3.80 | 2.09 | 5.65 | |
| 6 | 3.55 | 3.19 | 3.27 | 1.47 | −6.93 | −22.30 | 21.98 | 447.33 | 2.09 | 6.77 | |
| 7 | 5.69 | 8.19 | 13.46 | 9.69 | −73.20 | −377.73 | 588.18 | 19279.99 | 2.09 | 7.90 | |
| 8 | 8.50 | 18.26 | 44.07 | 29.77 | −881.21 | −9169.61 | −42543.18 | 362872.76 | 2.09 | 9.03 | |
| 9 | 11.83 | 33.43 | 72.77 | −583.69 | −9792.04 | 654.93 | 2348606.58 | 27695330.20 | 2.09 | 10.16 | |
| 10 | 14.66 | 43.78 | 5.12 | −1972.94 | −4199.98 | 436344.29 | 2452126.18 | −214451973.79 | 2.09 | 11.29 | |
| 11 | 16.44 | 46.68 | −86.07 | −2373.78 | 18354.16 | 562769.22 | −9865268.34 | −278693443.05 | 2.09 | 12.42 | |
| 12 | 17.43 | 46.71 | −144.73 | −2181.18 | 33451.46 | 390646.31 | −17658764.09 | −75117959.02 | 2.09 | 13.55 | |
| 13 | 17.99 | 46.18 | −177.17 | −1921.18 | 40831.90 | 209668.99 | −20357252.19 | 109887544.59 | 2.09 | 14.68 | |
| 14 | 18.30 | 45.69 | −195.17 | −1723.07 | 44353.03 | 82809.21 | −21009161.82 | 228049326.78 | 2.09 | 15.81 | |
| 15 | 18.49 | 45.33 | −205.53 | −1589.07 | 46125.72 | 1104.68 | −21029440.75 | 299107504.35 | 2.09 | 16.94 | |
| 16 | 18.61 | 45.09 | −211.75 | −1500.91 | 47081.72 | −51002.13 | −20896556.67 | 342264715.14 | 2.09 | 18.06 | |
| 17 | 18.68 | 44.92 | −215.62 | −1442.93 | 47630.29 | −4579.68 | −20753607.19 | 369147090.12 | 2.09 | 19.19 | |
| 18 | 18.73 | 44.82 | −217.92 | −1407.30 | 47938.09 | −104946.27 | −20645504.59 | 385087512.06 | 2.09 | 20.32 | |
| 19 | 18.72 | 44.82 | −217.85 | −1408.36 | 47929.23 | −104342.60 | −20648939.01 | 384619064.86 | 2.09 | 21.45 | |
| 20 | 18.61 | 45.08 | −211.82 | −1499.90 | 47091.81 | −51591.81 | −20894429.02 | 342743182.03 | 2.09 | 22.58 | |
| 21 | 18.28 | 45.73 | −193.77 | −1739.94 | 44098.84 | 93321.82 | −20985139.89 | 218614684.56 | 2.09 | 23.71 | |
| 22 | 17.64 | 46.56 | −157.07 | −2096.11 | 36383.05 | 329057.29 | −18877917.19 | −9884837.14 | 2.09 | 24.84 | |
| 23 | 16.65 | 46.79 | −98.23 | −2361.63 | 21566.73 | 543424.55 | −11651899.31 | −252122928.12 | 2.09 | 25.97 | |
| 24 | 15.30 | 45.21 | −24.47 | −2206.51 | 2494.17 | 529969.56 | −939087.82 | −283408170.14 | 2.09 | 27.10 | |
| 25 | 13.68 | 40.82 | 41.12 | -1497.48 | -10327.79 | 252315.74 | 4641727.93 | −86303510.97 | 2.09 | 28.23 | |
| DG/ES | Unit Cost | Installation Cost ($/kW) | Maintenance Cost |
|---|---|---|---|
| Diesel | 300 $/kW | 600 | 0.02 $/kWh |
| WTG | 1500 $/kW | 600 | 0.06 $/kW |
| PV | 8000 $/kW | - | - |
| ES | 300 $/kWh | - | - |
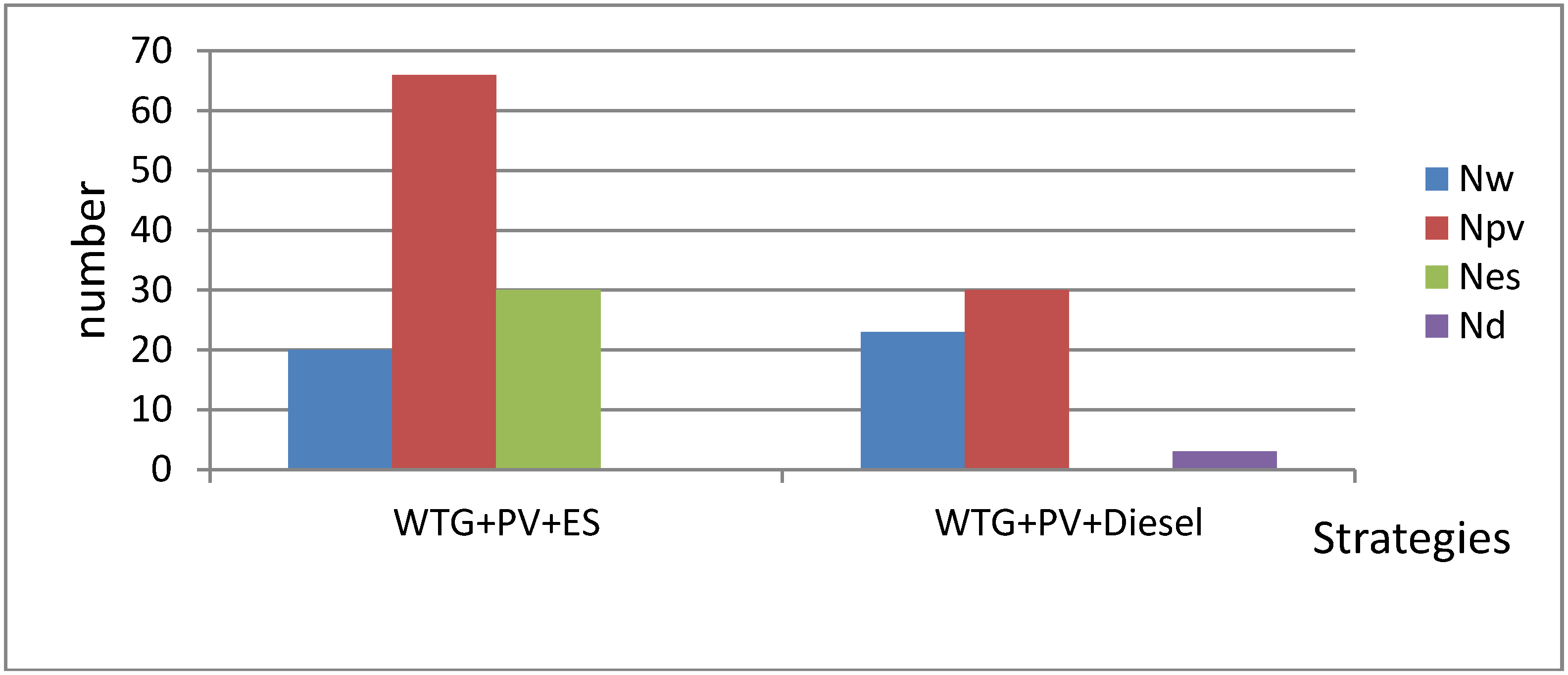
4.2. Results without Considering Diesel Generation or Energy Storage

| Strategies | Total Cost ($) | LOLP | CO2 (kg/y) | CPU (s) |
|---|---|---|---|---|
| WTG + PV + ES | 3,699,000 | 0.030 | - | 203.50 |
| WTG + PV + Diesel | 2,476,926 | 0.028 | 49,821 | 28.71 |
4.3. Impacts of Different LOLP Constraints

| LOLPmax | Total Cost ($) | LOLP | CO2 (kg/y) | CPU (s) |
|---|---|---|---|---|
| 0.01 | 3,318,728 | 0.004 | 49,938 | 57.8 |
| 0.02 | 2,859,729 | 0.015 | 49,945 | 73.2 |
| 0.03 | 2,226,227 | 0.024 | 49,882 | 93.9 |
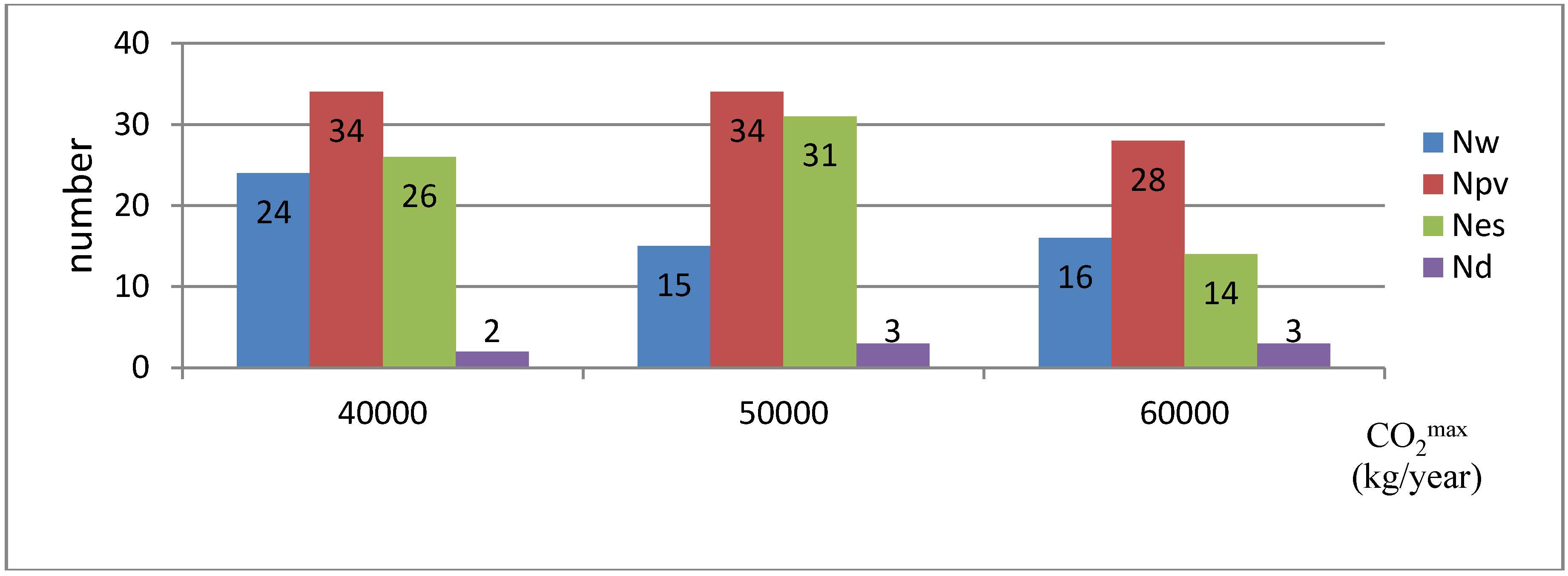
4.4. Impacts of Different CO2 Constraints

| CO2max (kg/year) | Total Cost ($) | LOLP | CO2 (kg/y) | CPU (s) |
|---|---|---|---|---|
| 4 × 104 | 2,674,314 | 0.030 | 39,161 | 85.0 |
| 5 × 104 | 2,226,227 | 0.024 | 49,882 | 93.9 |
| 6 × 104 | 2,033,995 | 0.029 | 59,379 | 137.2 |
4.5. Effect of Cumulative Probability

| Cumulative Probabilities | Total Cost ($) | LOLP | CO2 (kg/y) | CPU (s) |
|---|---|---|---|---|
| ξ = 70% | 3,658,728 | 0.022 | 49,894 | 117.0 |
| ξ = 95% | 2,226,227 | 0.024 | 49,882 | 93.9 |
| ξ = 100% | 1,893,731 | 0.027 | 49,969 | 69.0 |
| deterministic | 4,118,731 | 0.022 | 49,989 | 100.3 |
4.6. Impacts of Different Initial SOCs
| SOC | Total Cost ($) | LOLP | CO2 (kg/y) | CPU (s) |
|---|---|---|---|---|
| SOC = 50% | 2,227,112 | 0.023 | 49,997 | 95.0 |
| SOC = 70% | 2,226,603 | 0.024 | 49,955 | 94.4 |
| SOC = 85% | 2,226,227 | 0.024 | 49,882 | 93.9 |
4.7. Discussions
- (1)
- Energy storage effectively provides an emission-free generation resource that supports reliability but is much more costly than diesel generators.
- (2)
- Strict LOLP and CO2 emission limits require large investments to ensure the supply of high quality power and low emissions in a small autonomous power system.
- (3)
- The CPU times required to perform simulations are approximately 1–3 min if the energy storage system is considered. If no energy storage system is considered, then a simulation takes only around 30 s. The CPU time that is required by the proposed method is independent of the number of buses/lines.
- (4)
- The required CPU time may increase if more data from more years (two or three) are used to increase the accuracy of the evaluation of reliability, meaning that a longer planning horizon is considered. In this case, the expected lifetimes of all generation resources and the energy storage system should be evaluated.
- (5)
- The deterministic study yields a pessimistic solution with the largest cost among all approaches. A large cumulative probability ξ yields an optimistic solution. The cost ($2,226,227), obtained with ξ = 95%, which is widely acceptable, is less than a half of that ($4,118,731) obtained by the deterministic study.
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Kyoto Protocol to the United Nations Framework Convention on Climate Change; United Nations: Bonn, Germany, 1997.
- The Copenhagen Accord. In Proceedings of the United Nations Climate Change Conference, Copenhagen, Denmark, 7–18 December 2009.
- Billinton, R.; Karki, R. Apacity expansion of small isolated power systems using PV and wind energy. IEEE Trans. Power Syst. 2001, 16, 892–897. [Google Scholar] [CrossRef]
- Ai, B.; Yang, H.; Shen, H.; Liao, X. Computer-aided design of PV/wind hybrid system. Renew. Energy 2003, 28, 1491–1512. [Google Scholar] [CrossRef]
- Nelson, D.B.; Nehrir, M.H.; Wang, C. Unit sizing and cost analysis of stand-alone hybrid wind/PV/fuel cell power generation systems. Renew. Energy 2006, 31, 1641–1656. [Google Scholar] [CrossRef]
- Diaf, S.; Diaf, D.; Belhamel, M.; Haddadi, M. A methodology for optimal sizing of autonomous hybrid PV/wind system. Energy Policy 2007, 35, 5708–5718. [Google Scholar] [CrossRef]
- Katsigiannis, Y.A.; Georgilakis, P.S.; Karapidakis, E.S. Hybrid simulated annealing—Tabu search method for optimal sizing of autonomous power systems with renewable. IEEE Trans. Sustain. Energy 2012, 3, 330–338. [Google Scholar] [CrossRef]
- Vrettos, E.I.; Papathanassiou, S.A. Operating policy and optimal sizing of a high penetration RES-BESS system for small isolated grids. IEEE Trans. Energy Convers. 2011, 26, 744–756. [Google Scholar] [CrossRef]
- Belfkira, R.; Zhang, L.; Barakat, G. Optimal sizing study of hybrid wind/PV/diesel power generation unit. Sol. Energy 2011, 85, 100–110. [Google Scholar] [CrossRef]
- Cabral, C.V.T.; Filho, D.O.; Diniz, A.S.A.C.; Martins, J.H. A stochastic method for stand-alone photovoltaic system sizing. Sol. Energy 2010, 84, 1628–1636. [Google Scholar] [CrossRef]
- Lujano-Rojas, J.M.; Dufo-López, R.; Bernal-Agustín, J.L. Probabilistic modelling and analysis of stand-alone hybrid power systems. Energy 2013, 63, 19–27. [Google Scholar] [CrossRef]
- Lujano-Rojas, J.M.; Dufo-Lopez, R.; Bernal-Agustin, J.L. Optimal sizing of small wind/battery systems considering the DC bus voltage stability effect on energy capture, wind speed variability, and load uncertainty. Appl. Energy 2012, 93, 404–412. [Google Scholar] [CrossRef]
- Kaviani, A.K.; Riahy, G.H.; Kouhsari, S.H.M. Optimal design of a reliable hydrogen-based stand-alone wind/PV generating system, considering component outages. Renew. Energy 2009, 34, 2380–2390. [Google Scholar] [CrossRef]
- Chen, S.G. Bayesian approach for optimal PV system sizing under climate change. Omega 2013, 41, 176–185. [Google Scholar] [CrossRef]
- Borhanazad, H.; Mekhilef, S.; Ganapathy, V.G.; Modiri-Delshad, M. Optimization of micro-grid system using MOPSO. Renew. Energy 2014, 71, 295–306. [Google Scholar] [CrossRef]
- Sharafi, M.; ELMekkawy, T.Y. Multi-objective optimal design of hybrid renewable energy systems using PSO-simulation based approach. Renew. Energy 2014, 68, 67–79. [Google Scholar] [CrossRef]
- Diaf, S.; Notton, G.; Belhamel, M.; Haddadi, M. Design and techno-economical optimization for hybrid PV/wind system under various meteorological conditions. Appl. Energy 2008, 85, 968–987. [Google Scholar] [CrossRef]
- Kaldellis, J.K. Optimum autonomous wind-power system sizing for remote consumers using long-term wind speed data. Appl. Energy 2002, 71, 215–233. [Google Scholar] [CrossRef]
- Luna-Rubio, R.; Trejo-Perea, M.; Vargas-Va’zquez, D.; Rı’os-Moreno, G.J. Optimal sizing of renewable hybrids energy systems: A review of methodologies. Sol. Energy 2012, 86, 1077–1088. [Google Scholar] [CrossRef]
- Atwa, Y.M.; el-Saadany, E.F. Probabilistic approach for optimal allocation of wind based distributed generation in distribution systems. IET Renew. Power Gener. 2011, 5, 79–88. [Google Scholar] [CrossRef]
- Soroudi, A.; Caire, R.; Hadjsaid, N.; Ehsan, M. Probabilistic dynamic multi-objective model for renewable and non-renewable distributed generation planning. IET Gener. Transm. Distrib. 2011, 5, 1173–1182. [Google Scholar] [CrossRef]
- Reliability Test System Task Force of the Application of Probability Methods Subcommittee. IEEE reliability test system. IEEE Trans. Power Syst. 1999, 14, 1010–1020. [Google Scholar]
- Alsema, E.A. Energy pay-back time and CO2 emissions of PV systems. Prog. Photovolt. Res. Appl. 2000, 8, 17–25. [Google Scholar] [CrossRef]
- Wang, C.S.; Liu, M.X.; Guo, L. Cooperative operation and optimal design for islanded microgrid. In Proceedings of the 2012 IEEE PES Innovative Smart Grid Technologies, Washington, DC, USA, 16–20 January 2012.
- Zhang, P.; Lee, S.T. Probabilistic load flow computation using the method of combined cumulants and Gram-Charlier expansion. IEEE Trans. Power Syst. 2004, 19, 676–681. [Google Scholar] [CrossRef]
- Hong, Y.Y.; Luo, Y.F. Optimal VAR control considering wind farms using probabilistic load flow and Gray-based genetic algorithms. IEEE Trans. Power Deliv. 2009, 24, 1441–1449. [Google Scholar] [CrossRef]
- Stuart, A.; Stuartx, J.K. Kendall’s Advanced Theory of Statistic, Distribution Theory, 6th ed.; Edward Arnold: London, UK, 1994; Volume 1. [Google Scholar]
- Review of Basic Statistical Concepts. Available online: http://sites.stat.psu.edu/~lsimon/stat501wc/sp05/00review/ (accessed on 20 March 2015).
- Taha, H.A. Integer Programming: Theory, Application and Computation; Academic Press: New York, NY, USA, 1975. [Google Scholar]
- Gen, M.; Cheng, R. Genetic Algorithms and Engineering Design; Wiley: New York, NY, USA, 1997. [Google Scholar]
- Keyhani, A. Design of Smart Power Grid Renewable Energy Systems; Wiley-IEEE Press: Hoboken, NJ, USA, 2011. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, Y.-Y.; Lai, Y.-M.; Chang, Y.-R.; Lee, Y.-D.; Liu, P.-W. Optimizing Capacities of Distributed Generation and Energy Storage in a Small Autonomous Power System Considering Uncertainty in Renewables. Energies 2015, 8, 2473-2492. https://doi.org/10.3390/en8042473
Hong Y-Y, Lai Y-M, Chang Y-R, Lee Y-D, Liu P-W. Optimizing Capacities of Distributed Generation and Energy Storage in a Small Autonomous Power System Considering Uncertainty in Renewables. Energies. 2015; 8(4):2473-2492. https://doi.org/10.3390/en8042473
Chicago/Turabian StyleHong, Ying-Yi, Yuan-Ming Lai, Yung-Ruei Chang, Yih-Der Lee, and Pang-Wei Liu. 2015. "Optimizing Capacities of Distributed Generation and Energy Storage in a Small Autonomous Power System Considering Uncertainty in Renewables" Energies 8, no. 4: 2473-2492. https://doi.org/10.3390/en8042473