1. Introduction
Demand-responsive feeder transit services (DRTs), assigning buses to cover all pickup locations to transport passengers to the rail station, can provide a door-to-door type of service for the first/last mile access to link residential areas and a major fixed-route transit network [
1,
2]. Compared to fixed-route feeder transit services (FRTs), DRTs can catch each passenger’s personalized desires in low-density residential areas by using a cell phone app to place a travel order involving pickup or drop-off locations, windows of time service, and the predetermined subway schedule to provide a lower operating cost and a higher service level [
3]. Therefore, DRTs have attracted the widespread attention of domestic and foreign scholars.
The passengers’ travel orders are the input to the design process of the DRT model. In general, they are willing to choose their own subway schedule, except for the pickup or drop off locations, the boarding time window, etc. Obviously, the passengers’ personalized subway schedules affect the route-building process. However, the DRT model has not been integrated with personalized travel [
4]. Therefore, it is necessary to reveal the impact of the subway schedule chosen by passengers on the design process of the feeder bus route in order to trade off operation cost and service level.
Another major motivation of this paper is to address DRTs with the synchronous coordination of rail transit. Few studies have examined this problem, but many examined the synchronous transfer between the shuttle and the feeder bus [
5,
6]. Without the loss of generality, it is only relevant to the wait-time for passengers taking the subway beforehand, being an important part of total travel time, and it has an impact on the design process of the feeder bus route to the change in ride-time. Obviously, the synchronous transfer between the shuttle and the feeder bus may reduce the total travel time for all passengers. Hence, it is very important to find the optimal relation between the feeder bus routing and the synchronous coordination of rail transit in order to trade off wait-time and ride-time.
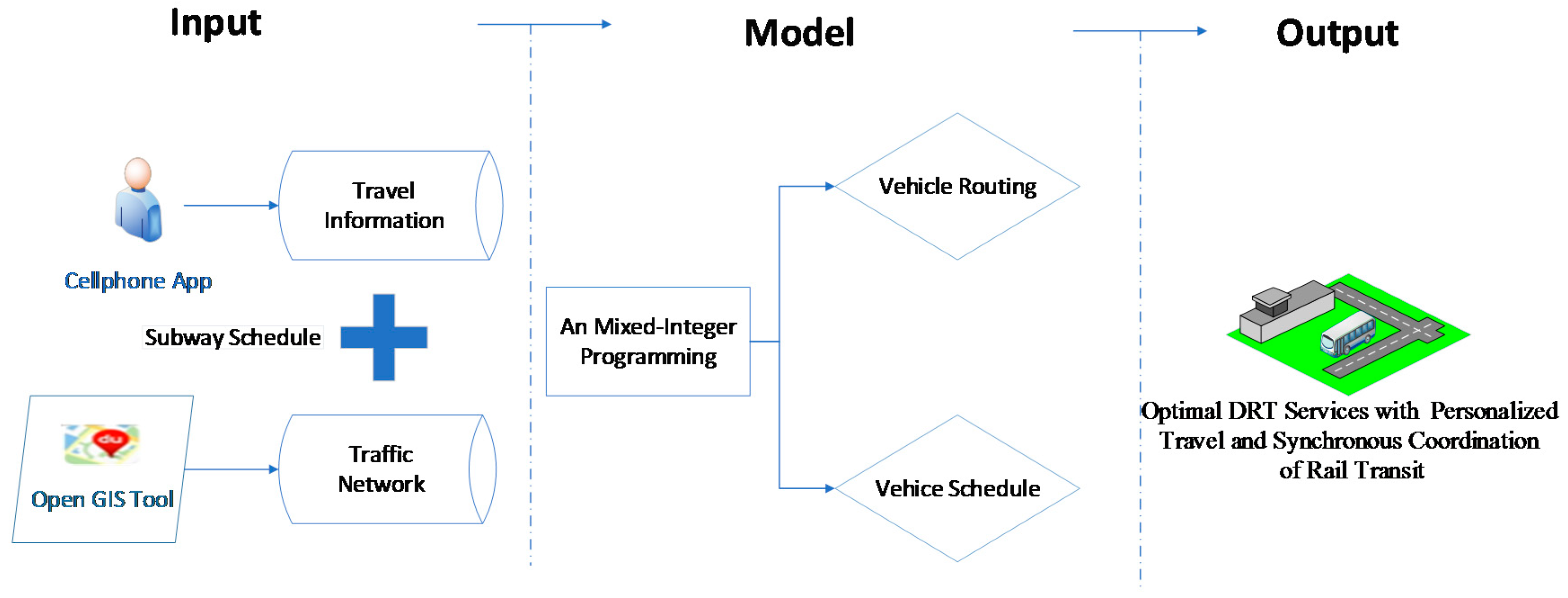
The main contribution of this paper is to present an efficient optimization framework for DRTs with personalized travel orders using a cell phone app and synchronous coordination of rail transit to improve the service level. This study will pay attention to the following critical research tasks: (1) coordinating the process of designing the feeder transit routing and the schedule, considering the synchronous transfer between the shuttle and the feeder bus; (2) based on the division of the problem into several sub-problems, developing a distributed genetic algorithm to efficiently find meta-optimal solutions to the proposed mode; and, finally, (3) a numeric case study is used to illustrate the application and feasibility of the proposed methodology.
The remainder of this paper is organized as follows: The related studies of DRTs are introduced in
Section 2.
Section 3 describes the problem of the proposed methodology and formulates the mathematic model of the DRT.
Section 4 presents a distributed genetic algorithm for resolving the model.
Section 5 and
Section 6 display and discuss a case study to illustrate the proposed methodology, as well as remarks and possible future work.
2. Literature
DRTs, integrating both of the vehicle routing problem (VRP) and the pickup and delivery problem (PDP) [
7,
8], are used to provide door-to-door transportation services wherein vehicles are assigned to visit some locations to pick up or deliver passengers [
9,
10,
11]. However, the distinct differences between VRPs, PDPs, and DRTs result in DRTs addressing more issues and having more complexity than VRPs and PDPs. Compared to FRTs, DRTs are more suitable in low population density areas, especially those places with a weak traffic infrastructure [
11,
12]. There have been numerous studies on DRTs in recent years, which can be divided into two main categories: analytic approaches and network approaches [
13,
14].
The analytic approach reveals the optimal relation between route spacing, the operating headway, and the stop space in the service area, where the shape geometry of the street and the demand distribution of these places are required. The first analytical approach was proposed by Wirasinghe [
15] to design the DRT during a peak-period demand in the Calgary (South Corridor) DRT system. Based on this, Kuah and Perl further studied the influencing factors of bus-stop spacing on the DRT model [
16,
17]. Chowdhury further extended the DRT model with coordinated routes, where the stochastic feeder vehicle arrivals at transfer stations were considered [
18]. However, the analytic approach has not been widely used to deal with DRTs, due to the fact that two model inputs, i.e., the shape geometry of the street and the demand distribution of these places, are regarded as the most significant limitations [
14].
The network approaches represent the service that assigns bus routes to visit the pickup locations, where each location is assumed to be concentrated as a node and the links between these nodes represent the segments of bus routes. There are two typical network approaches to the DRT model, i.e., the feeder-bus network design optimization model proposed by Kuah and Perl [
17] and extended by Chang and Chang [
19], Martins and Pato [
20], Kuan, Ong, and Ng [
14], Mohaymany and Gholami [
21], and the heuristic feeder route generation algorithm (HFRGA) proposed by Shrivastava and Dhingra [
22], and also extended by Shrivastava and O’Mahony [
23,
24,
25]. Chen et al. [
26] proposed a two-phase mode to cope with DRT FBNDP. Deng et al. [
27] proposed a model to solve the multi-level cost structure (passengers’ cost and operators’ cost) of M-to-M DRT. Pan et al. [
28] presented a bi-level model to serve the maximum number of passengers in the feeder transit system in the upper level and to obtain the optimal operational cost for transit operators in the lower level. Yu et al. [
29] presented a bi-level nonlinear MIP model to optimize the flexible feeder dedicated transit from bus stops to rail stations, and vice versa. Sun et al. [
30] constructed a multi-objective MIP model in establishing coordination between rail and bus lines. Yan et al. [
31] used a robust MIP model to minimize the sum of the operator cost and its variability, following a weighting process of the cost components. Sun et al. [
32] presented a MIP model for DRT that considered passengers’ multiple time windows and their satisfaction.
Although existing studies have successfully studied a variety of DRTs, the two key issues deserve further investigation:
(1) Few of the studies take the synchronous transfer of rail transit and personalized travel (the subway schedule chosen by passengers) into account. In the case, it implies a neglect of the integrated operation of the feeder bus routing and the schedule considering synchronous transfer between the shuttle and the feeder bus to minimize the total ride-time and wait-time for all passengers.
(2) DRTs, as extensions of the VRP and PDP, are NP-hard problems, and should be resolved by an efficient algorithm.
4. A GA-Based Heuristic Algorithm
The DCR model is an extension of the NP-hard problem related to VRP and PDP; the exact algorithm could not be solved for a large-scale instance within an acceptable time. Thus, a GA-based heuristic approach is further developed to efficiently yield acceptable solutions [
33,
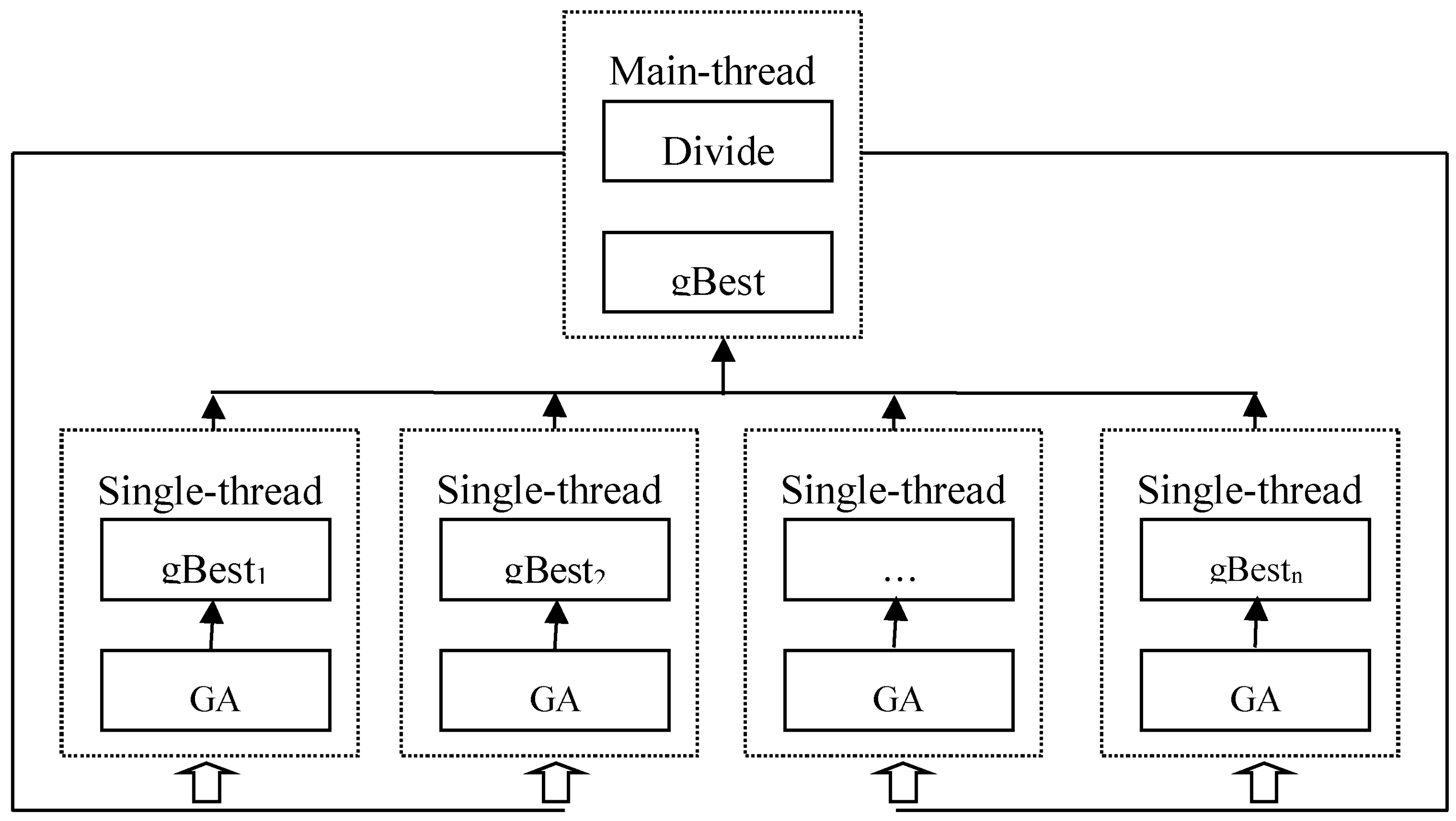
34]. According to the characteristics of the problem, all passengers can be divided into several groups
using Equation (14), when they place their personalized travel orders. In this case, the passengers in each group choose the same subway schedule
at the rail station
, and the design process of the feeder bus routes servicing passengers in each group, i.e., the three core variables
,
, and
, do not affect each other. In order to solve the large-scale problem [
35,
36], this paper designs a distributed parallel genetic algorithm, shown in
Figure 3. Based on the main working thread dividing the problem into sub-problems and providing the data for the sub-problems, the single-population GA is run independently by single working threads to calculate
,
, and
of
(gBest
i), and the optimal solution to the original problem is found by the main working thread in order to summarize the calculation results of the single-population GA, executed concurrently with multiple working threads.
4.1. Coding of GA Chromosomes
An efficient coding structure of chromosomes to the solution plays a key role in the process of GA searching. In our study, the main body of the proposed model is composed of designing routes and schedules that correspond to () and (), respectively. Therefore, if we use a two-dimensional vector to represent solutions to this model, it could be further decomposed into three parts, and explained as follows:
- (1)
The first part of the GA chromosome, (the vector of integer variables) is used to represent the decision of the feeder bus route. The element () is the number of the demand point, and the element () is the number of the vehicle, i.e., .
- (2)
The second part of the GA chromosome, (the vector of real variables) is used to represent the decision of schedule of the feeder bus. The element denotes the departure time of feeder bus k leaving the bus depot.
4.2. Fitness Evaluation
The objective function
is used to evaluate the fitness of the candidate solutions. Note that the candidate solutions satisfy constraints described by Equations (2)–(7) and may violate constraints described by Equations (9), (11)–(14). To deal with this problem, we include those constraints as penalty terms into the function of the fitness evaluation. In this case, poor solutions will be abandoned and good solutions have more opportunities to be selected into the next generation in the genetic operations of the GA. Thus, the modified fitness function in our study is given by:
4.3. A Heuristic Algorithm of Generating the Initial Population
Many complicated factors influencing the DRT model results in difficulty in randomly generating a feasible solution to this problem. The quality of the solution found depends highly on the selection of the initial population, thus it is important to design a heuristic algorithm to generate the initial population. As mentioned above, and determine , and the objective function leads to the generation of a viable individual to arrange vehicles to visit a series of feasible adjacent notes () until all the nodes are traversed. The procedures are explained as follows:
- Step 1.
For , if , find all pairs of feasible adjacent nodes, i.e., .
- Step 2.
Let denote the set of feeder buses, and each vehicle is randomly and initially placed at the nodes .
- Step 3.
For each vehicle , find the next feasible nodes in , according to the constraints described by Equations (11)–(13),and randomly select a pair . Let and , and continue to step 4.
- Step 4.
If , turn to the step 2; otherwise, the algorithm is terminated to output the result.
4.4. Genetic Operators
Selection, crossover, and mutation are three basic operations of GA. The selection operation selects the good individuals from the current parent population to breed the next generation, a combination of the roulette and the elite retention strategy is generally adopted. The crossover operation exchanges some genes of parental chromosomes to generate diversified individuals. The mutation operations can avoid some loss of genetic information due to the selection and crossover operation and maintain the diversity of the populations.
In order to avoid the crossover and mutation operation, destroying the feasible spatial structure of the chromosomes, we do not directly manipulate the chromosomes and decode them into vehicle paths. After randomly choosing one of the possible adjacent node pairs, we exchange part of the vehicle path genes of the parental chromosome, remove duplicates, and replenish missing genes. By following the constraints of Equations (11)–(13) these operations would generate a new chromosome. Obviously, the crossover and mutation operators in this paper will not destroy the feasible chromosomes.
4.5. Stopping Criteria
A preset maximal number of generations are reached; or, the difference between the minimum evaluation values between two adjacent generations is less than a threshold.
6. Conclusions
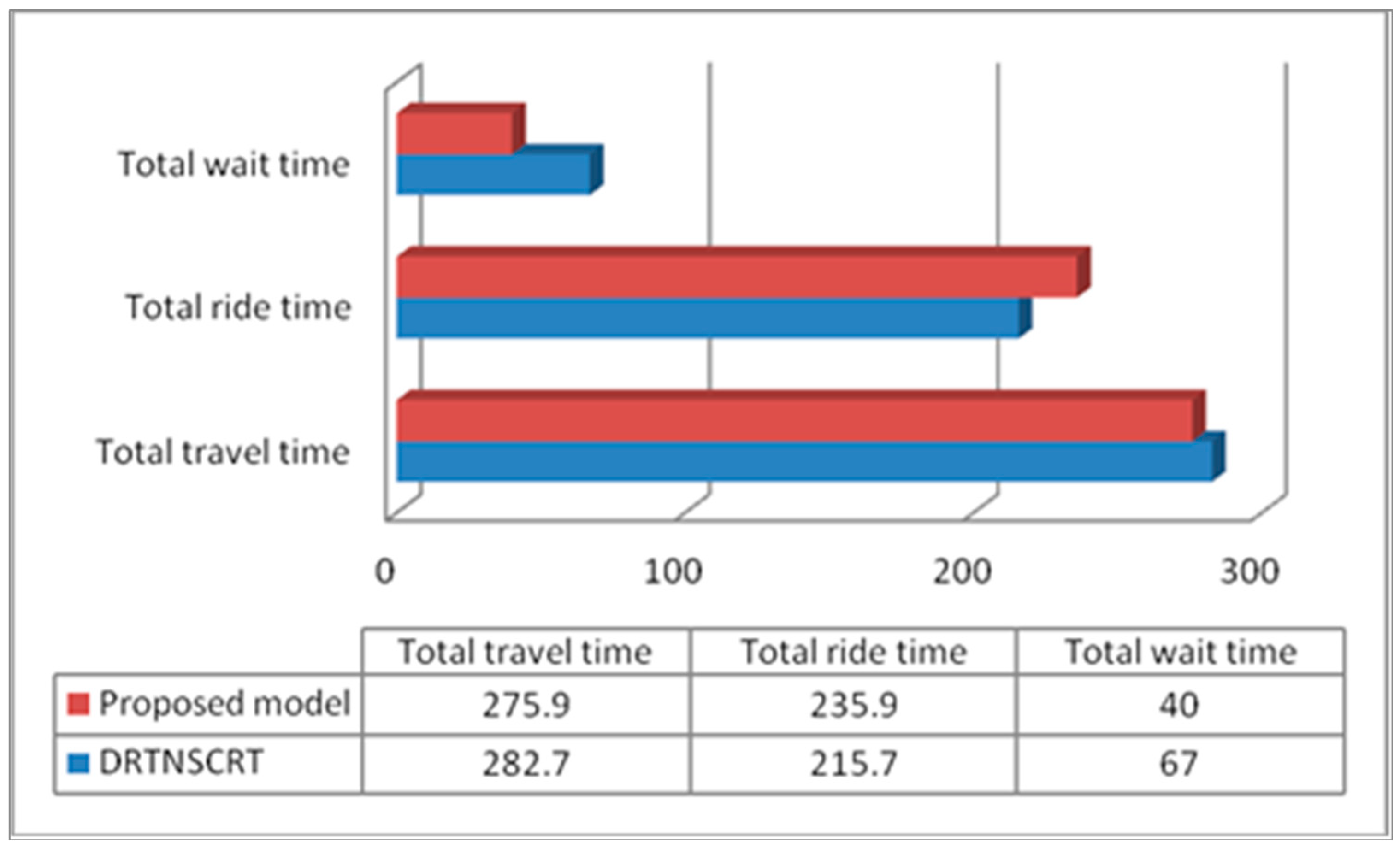
The main contribution of this paper is to create a novel optimization methodology for DRTs with personalized travel and the synchronous coordination of rail transit, to reveal the relation between the ride-time for vehicles from the pickup locations to the rail station, and the wait-time for passengers taking the subway beforehand. In contrast to existing studies, the proposed methodology reflects: (1) an integration process for designing the DRT routing and schedule, considering synchronous transfer between the shuttle and feeder bus; and (2) a distributed GA developed to efficiently resolve the proposed mode. Results show that the total ride-time of the proposed model is significantly increased by 9.36%, but the total wait-time is significantly reduced by 67.5%, which results in the total travel time of our model being reduced by 2.46% compared to the traditional DRT model. Additionally, the difference in optimal solutions between the proposed GA, standard GA, and the use of Cplex is about 5–7%, but the calculation speed is proved acceptable, which proves the validity of the algorithm.
Note that this research is based on key hypotheses of pedestrian boarding places (demand points) being bus stops and the stable OD table. It neglects the integrated assignment of demand points to selected stops, and the dynamic setting with time-varying traffic conditions. Therefore, this model is very useful at the stage of strategic demand-responsive transit service for vehicles visiting demand points directly. However, the model can not deal with demand points located at one way streets or left-turn only intersections in real traffic network. Extending the model to simultaneously select optimal stops in candidates with assignments of pedestrians to these selected stops with time-varying OD is a worthwhile further work.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}