
Microgrid Protection Using Magneto-Resistive Sensors and Superimposed Reactive Energy

 ,
,  ,
,  , ,
, ,  and
and
Abstract
:1. Introduction
- The presented scheme can non-intrusively sense the faulty conditions using MR sensors without any modification and disturbance to the current system.
- The scheme works well with radial as well as looped micro-grids with different configurations against solid faults having the capability of single line tripping.
- The proposed protection mechanism works well with both grid-tied and islanded modes without any changes in relay setting during the transition of operational modes.
2. Mathematical Modeling of Proposed Protection Scheme
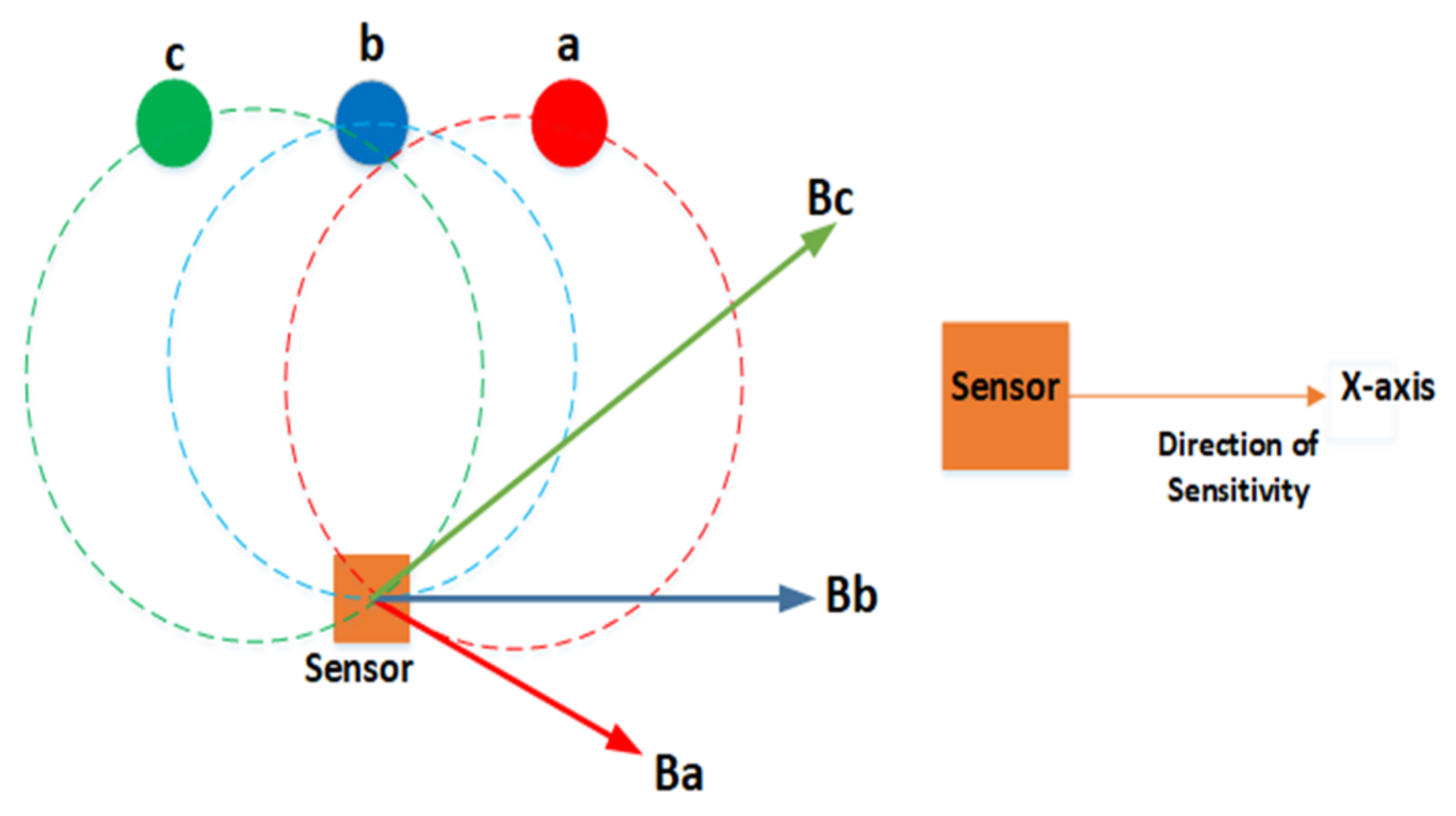
2.1. Magnetic Field Calculation
2.2. Superimposed Quantities (SIQ)
2.3. Superimposed Reactive Energy (SRE)
3. Proposed Protection Scheme
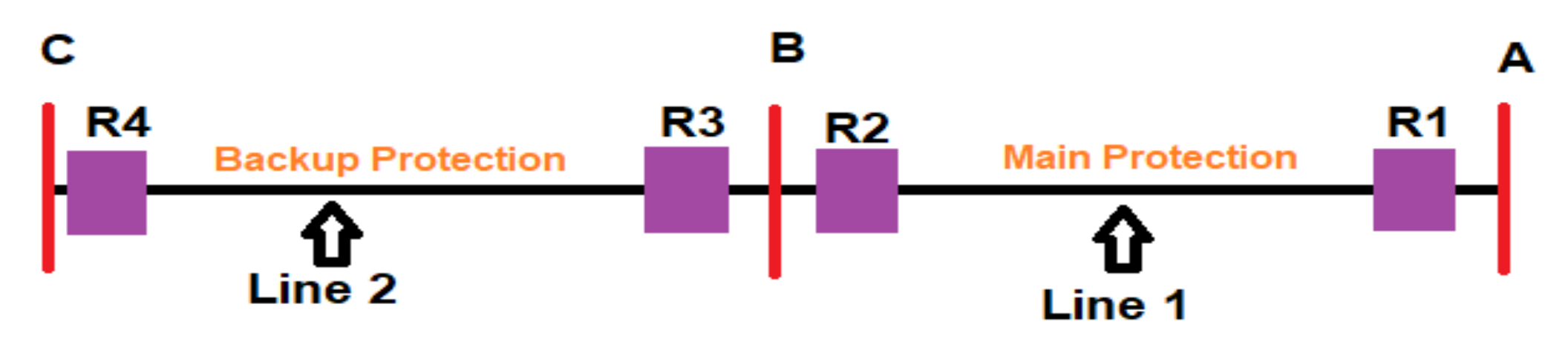
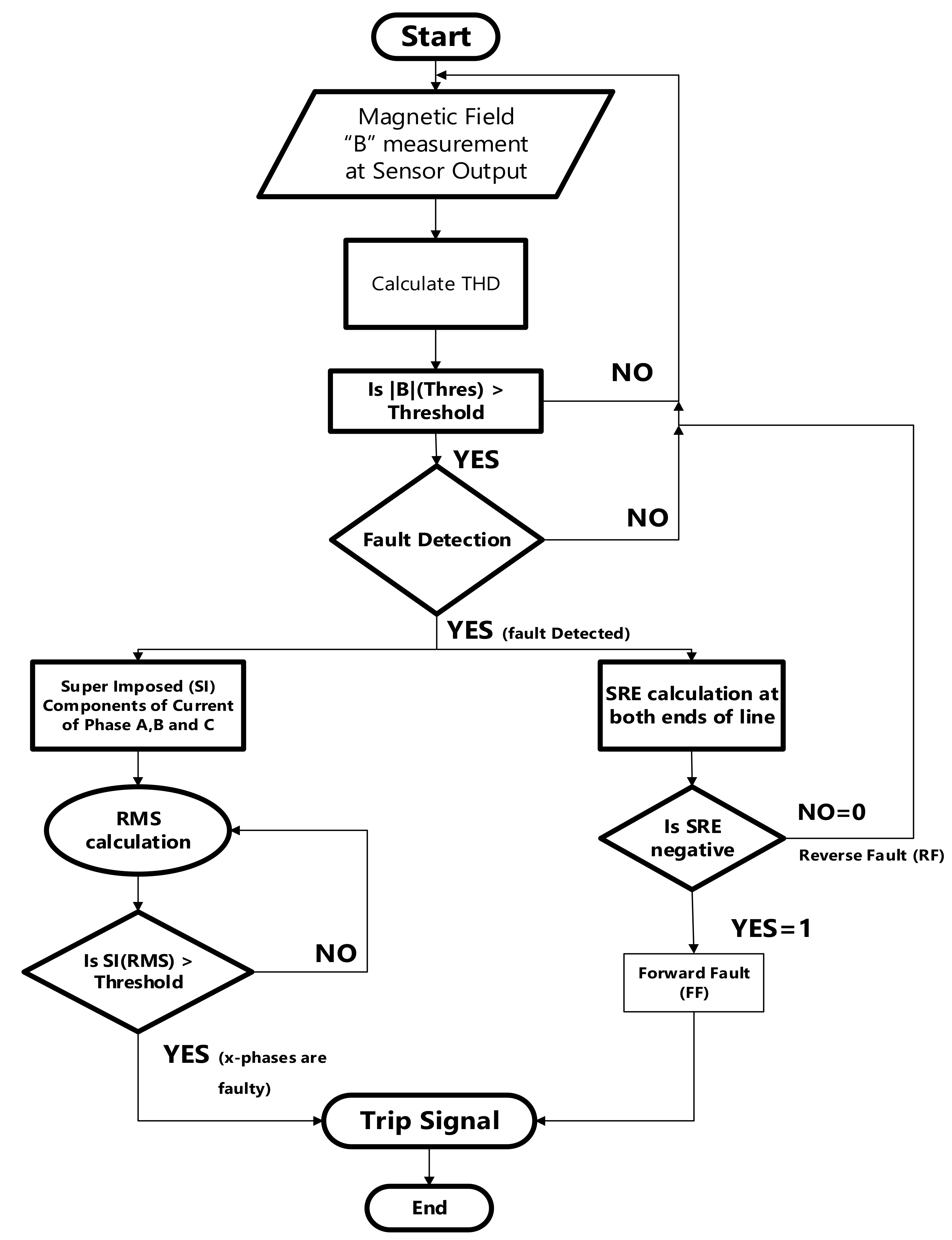
3.1. Fault Detection Scheme
3.2. SRE-Based Protection Scheme
3.3. Proposed Protection Relay
3.3.1. Fault Detection Block
3.3.2. Fault Directional and Localization Block
3.3.3. Fault Classification Block
3.3.4. Tripping Block
4. Simulations, Results and Discussion
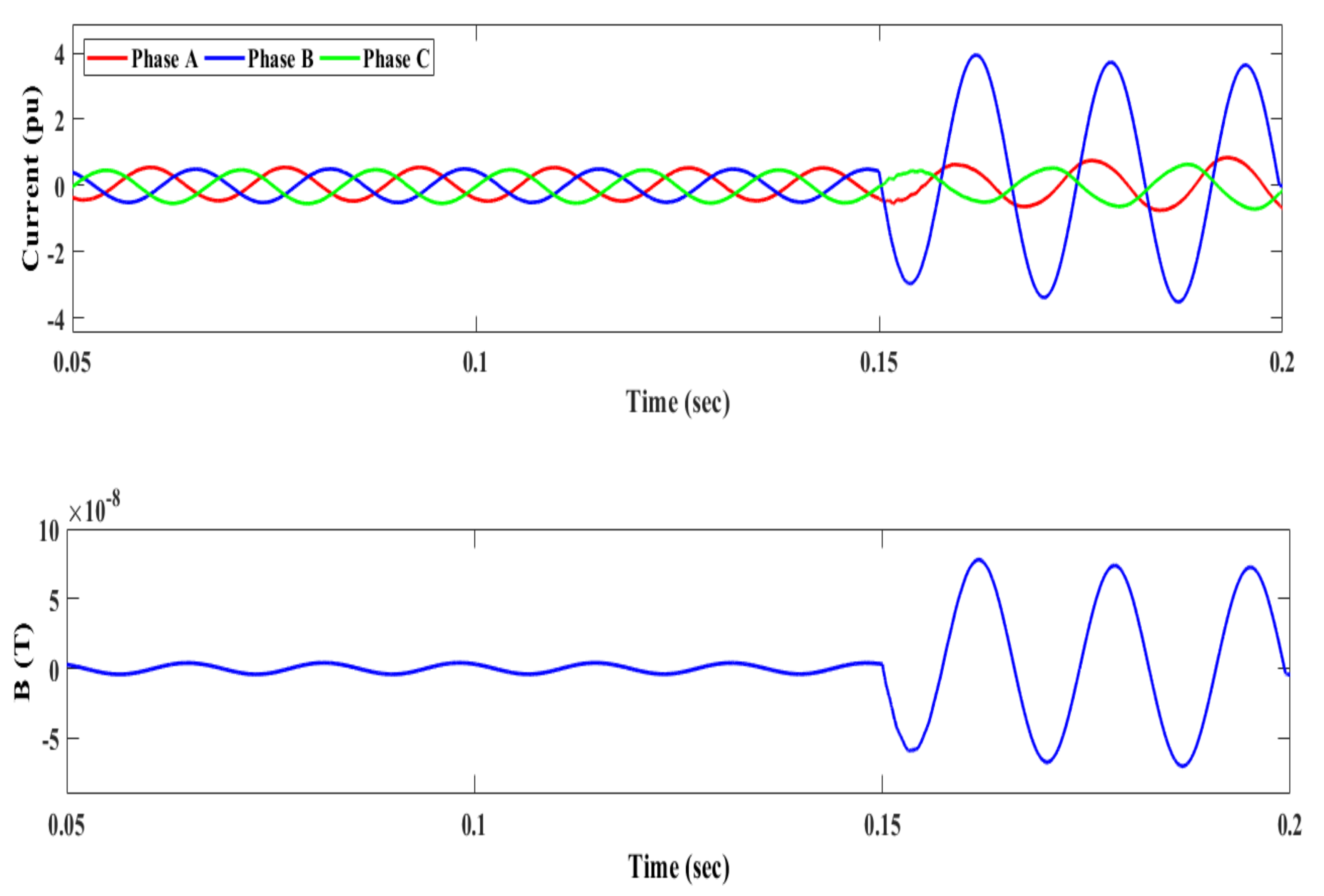
4.1. Fault Detection Scheme
4.1.1. Case Study 1: Grid Connected Mode
4.1.2. Case Study 2: Islanded Mode
4.1.3. Case Study 3: Looped Configurations
4.1.4. Case Study 4: Looped Configurations with Multiple DGs
5. Comparative Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MR Sensors | Magneto-Resistive Sensors |
| B | Magnetic Field |
| DER | Distributed Energy Resources |
| DG’s | Distributed Generators |
| SRE | Superimposed Reactive Energy |
| SIQ | Superimposed Quantities |
| FF | Forward Fault |
| RF | Reverse Fault |
| MP | Main Protection |
| BP | Backup Protection |
| det. | Detection |
| dir. | Direction |
| ADC | Analog to Digital Converter |
| R | Relay |
| Thres | Threshold |
| IIDG | Inverter Interfaced Distributed Generator |
| BTS | Breaker Trip Signal |
| HIF | High Impedance Fault |
| GCM | Grid-Connected Mode |
| ICM | Islanded Mode |
| LGCM | Looped Grid-Connected Mode |
| LIM | Looped Islanded Mode |
| PCC | Point of Common Coupling |
References
- Mathur, A.; Das, B.; Pant, V. Fault analysis of unbalanced radial and meshed distribution system with inverter based distributed generation (IBDG). Int. J. Electr. Power Energy Syst. 2017, 85, 164–177. [Google Scholar] [CrossRef]
- Tan, X.; Li, Q.; Wang, H. Advances and trends of energy storage technology in Microgrid. Int. J. Electr. Power Energy Syst. 2013, 44, 179–191. [Google Scholar] [CrossRef]
- Hatziargyriou, N.; Asano, H.; Iravani, R.; Marnay, C. Microgrids. IEEE Power Energy Mag. 2007, 5, 78–94. [Google Scholar] [CrossRef]
- Cagnano, A.; De Tuglie, E.; Mancarella, P. Microgrids: Overview and guidelines for practical implementations and operation. Appl. Energy 2019, 258, 114039. [Google Scholar] [CrossRef]
- Hussain, N.; Nasir, M.; Vasquez, J.C.; Guerrero, J.M. Recent Developments and Challenges on AC Microgrids Fault Detection and Protection Systems—A Review. Energies 2020, 13, 2149. [Google Scholar] [CrossRef]
- Kang, X.; Nuworklo, C.E.; Tekpeti, B.S.; Kheshti, M. Protection of micro-grid systems: A comprehensive survey. J. Eng. 2017, 2017, 1515–1518. [Google Scholar] [CrossRef]
- Mahamedi, B.; Fletcher, J.E. Trends in the protection of inverter-based microgrids. IET Gener. Transm. Distrib. 2019, 13, 4511–4522. [Google Scholar] [CrossRef]
- Brearley, B.J.; Prabu, R.R. A review on issues and approaches for microgrid protection. Renew. Sustain. Energy Rev. 2017, 67, 988–997. [Google Scholar] [CrossRef]
- Mirsaeidi, S.; Said, D.M.; Mustafa, M.W.; Habibuddin, M.H.; Ghaffari, K. An analytical literature review of the available techniques for the protection of micro-grids. Int. J. Electr. Power Energy Syst. 2014, 58, 300–306. [Google Scholar] [CrossRef]
- Brearley, B.J.; Raja Prabu, R.; Regin Bose, K.; Sankaranarayanan, V. Adaptive relay co-ordination scheme for radial microgrid. Int. J. Amb. Energy 2022, 43, 2180–2193. [Google Scholar] [CrossRef]
- Mirsaeidi, S.; Said, D.M.; Mustafa, M.W.; Habibuddin, M.H. A protection strategy for micro-grids based on positive-sequence component. IET Renew. Power Gener. 2015, 9, 600–609. [Google Scholar] [CrossRef] [Green Version]
- Langarizadeh, A.; Hasheminejad, S. A new differential algorithm based on S-transform for the micro-grid protection. Electr. Power Syst. Res. 2022, 202, 107590. [Google Scholar] [CrossRef]
- Li, X.; Dysko, A.; Burt, G.M. Traveling Wave-Based Protection Scheme for Inverter-Dominated Microgrid Using Mathematical Morphology. IEEE Trans. Smart Grid 2014, 5, 2211–2218. [Google Scholar] [CrossRef] [Green Version]
- Oureilidis, K.O.; Demoulias, C.S. A Fault Clearing Method in Converter-Dominated Microgrids with Conventional Protection Means. IEEE Trans. Power Electron. 2015, 31, 4628–4640. [Google Scholar] [CrossRef]
- Pinto, J.O.C.P.; Moreto, M. Protection strategy for fault detection in inverter-dominated low voltage AC microgrid. Electr. Power Syst. Res. 2020, 190, 106572. [Google Scholar] [CrossRef]
- Soleimanisardoo, A.; Karegar, H.K.; Zeineldin, H.H. Differential Frequency Protection Scheme Based on Off-Nominal Frequency Injections for Inverter-Based Islanded Microgrids. IEEE Trans. Smart Grid 2018, 10, 2107–2114. [Google Scholar] [CrossRef]
- Coffele, F.; Booth, C.; Dysko, A. An Adaptive Overcurrent Protection Scheme for Distribution Networks. IEEE Trans. Power Deliv. 2014, 30, 561–568. [Google Scholar] [CrossRef] [Green Version]
- Jayawarna, N.; Jones, C.; Barnes, M.; Jenkins, N. Operating microgrid energy storage control during net-work faults. In Proceedings of the 2007 IEEE International Conference on System of Systems Engineering, San Antonio, TX, USA, 16–18 April 2007; pp. 1–7. [Google Scholar]
- Beheshtaein, S.; Cuzner, R.; Savaghebi, M.; Golestan, S.; Guerrero, J.M. Fault location in microgrids: A communica-tion-based high-frequency impedance approach. IET Gener. Transm. Distrib. 2019, 13, 1229–1237. [Google Scholar] [CrossRef]
- Gao, H.; Li, J.; Xu, B. Principle and Implementation of Current Differential Protection in Distribution Networks with High Penetration of DGs. IEEE Trans. Power Deliv. 2016, 32, 565–574. [Google Scholar] [CrossRef]
- Saleh, S.A.; Ahshan, R.; Abu-Khaizaran, M.S.; Alsayid, B.; Rahman, M.A. Implementing and Testing d–q WPT-Based Digital Protection for Microgrid Systems. IEEE Trans. Ind. Appl. 2013, 50, 2173–2185. [Google Scholar] [CrossRef]
- Baloch, S.; Jamali, S.Z.; Mehmood, K.K.; Bukhari, S.B.A.; Zaman, M.S.U.; Hussain, A.; Kim, C.-H. Microgrid Protection Strategy Based on the Autocorrelation of Current Envelopes Using the Squaring and Low-Pass Filtering Method. Energies 2020, 13, 2350. [Google Scholar] [CrossRef]
- Jain, R.; Lubkeman, D.L.; Lukic, S.M. Dynamic Adaptive Protection for Distribution Systems in Grid-Connected and Islanded Modes. IEEE Trans. Power Deliv. 2018, 34, 281–289. [Google Scholar] [CrossRef]
- Jarrahi, M.A.; Samet, H.; Ghanbari, T. Novel Change Detection and Fault Classification Scheme for AC Microgrids. IEEE Syst. J. 2020, 14, 3987–3998. [Google Scholar] [CrossRef]
- Chakravorty, J.; Jain, A. Use of Magnetic Field Sensing Coils for Fault Location in Transmission Lines. Int. J. Emerg. Trends Eng. Dev. 2012, 4, 566–576. [Google Scholar]
- Khawaja, A.H.; Huang, Q.; Lian, L. Experimental study of Tunnel and Anisotropic Magnetoresistive sensor for power system magnetic field measurement applications. In Proceedings of the 2015 IEEE 3rd International Conference on Smart Instrumentation, Measurement and Applications (ICSIMA), Kuala Lumpur, Malaysia, 24–25 November 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Huang, Q.; Zhen, W.; Pong, P.W. A novel approach for fault location of overhead transmission line with noncontact magnetic-field measurement. IEEE Trans. Power Deliv. 2012, 27, 1186–1195. [Google Scholar] [CrossRef]
- Kazim, M.; Khawaja, A.H.; Zabit, U.; Huang, Q. Fault Detection and Localization for Overhead 11-kV Distribution Lines with Magnetic Measurements. IEEE Trans. Instrum. Meas. 2019, 69, 2028–2038. [Google Scholar] [CrossRef]
- Salari, J.C.; Mpalantinos, A.; Silva, J.I. Comparative Analysis of 2- and 3-D Methods for Computing Electric and Magnetic Fields Generated by Overhead Transmission Lines. IEEE Trans. Power Deliv. 2008, 24, 338–344. [Google Scholar] [CrossRef]
- Benmouyal, G.; Roberts, J. Superimposed quantities: Their true nature and application in relays. In Proceedings of the 26th Annual Western Protective Relay Conference, Spokane, WA, USA, 26–28 October 1999. [Google Scholar]
- Bukhari, S.B.A.; Zaman, M.S.U.; Haider, R.; Oh, Y.-S.; Kim, C.-H. A protection scheme for microgrid with multiple distributed generations using superimposed reactive energy. Int. J. Electr. Power Energy Syst. 2017, 92, 156–166. [Google Scholar] [CrossRef]
- Kar, S.; Samantaray, S.R.; Zadeh, M.D. Data-Mining Model Based Intelligent Differential Microgrid Protection Scheme. IEEE Syst. J. 2015, 11, 1161–1169. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal | 1 | 0 |
|---|---|---|
| B (det.) | Fault Detected | No Fault |
| R (dir.) | FF | RF |
| Operation | Threshold |
|---|---|
| Faulted Grid | 0.08 |
| Faulted Islanded | |
| Faulted Looped Configuration |
| Grid Parameter Description | Parameter Designation | Parameter Value |
|---|---|---|
| Voltage | V | 25 kV |
| Frequency | f | 60 Hz |
| DG’s Specifications PV/Wind DG | DER1 | 3 MW (Inverter based) |
| PV/Wind DG | DER 2–3 | 2 MW IIDG |
| Sync Generator | DER4 | 6 MW Sync Generator |
| Line Parameters DL1- DL6 | L | 20 km |
| Voltage | V base | 25 kV |
| Load Parameters | ∑ L1-L6 | 15 MW; 5.5 MVAR |
| Case Study # | Case # | Mode Description/Configuration |
|---|---|---|
| 1 | Case 1 | Grid Connected/Radial |
| 2 | Case 2 | Islanded/Radial |
| 3 | Case 3 | Grid Connected/Loop |
| Case 4 | Islanded/Loop | |
| 4 | Case 5 | Grid Connected/Loop(2 DER’s) |
| Case 6 | Islanded/Loop(2 DER’s) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mehmood, M.; Bukhari, S.B.A.; Altamimi, A.; Khan, Z.A.; Kazmi, S.A.A.; Yousif, M.; Shin, D.R. Microgrid Protection Using Magneto-Resistive Sensors and Superimposed Reactive Energy. Sustainability 2023, 15, 599. https://doi.org/10.3390/su15010599
Mehmood M, Bukhari SBA, Altamimi A, Khan ZA, Kazmi SAA, Yousif M, Shin DR. Microgrid Protection Using Magneto-Resistive Sensors and Superimposed Reactive Energy. Sustainability. 2023; 15(1):599. https://doi.org/10.3390/su15010599
Chicago/Turabian StyleMehmood, Musfira, Syed Basit Ali Bukhari, Abdullah Altamimi, Zafar A. Khan, Syed Ali Abbas Kazmi, Muhammad Yousif, and Dong Ryeol Shin. 2023. "Microgrid Protection Using Magneto-Resistive Sensors and Superimposed Reactive Energy" Sustainability 15, no. 1: 599. https://doi.org/10.3390/su15010599