


Floating Photovoltaic Plant Monitoring: A Review of Requirements and Feasible Technologies

 ,
,  ,
,  , , and
, , and 
Abstract
:1. Introduction
- Better average PV system efficiency due to the mitigating thermal effect resulting from the thermal capacity of the water [9];
- Indirect effect of water evaporation minimization [10];
- Shorter installation times compared to ground-based systems [11];
- Higher power density as compared to ground-based systems [12].
2. PV Floating Plants
- 1.
- To keep floating solar arrays within reasonable proximity of a target location (station keeping).
- 2.
- To minimize the movement of solar arrays caused by environmental forces such as winds, waves, and currents.
- 3.
- To maintain a minimum distance between solar arrays.
- 4.
- To cope with varying water levels.
- 5.
- Finally, the design of mooring systems must address the following challenges:
- A large number of mooring lines (especially in the case of pure float designs).
- Site constraints.
- Varying water levels.
- Unequal load distribution.
- Array shape and size.
3. PV Floating Monitoring Issues
3.1. Monitoring FPV Systems for Evaluating the Water Environment Impact on Energy Production
- Positioning of the PV Modules: The position of the photovoltaic (PV) modules can be affected by wave movements, which vary significantly depending on whether the system is located offshore or in freshwater basins, as well as the type and design of the anchoring system. Consequently, the modules exhibit variable positioning.
- Temperature of the PV Modules: The temperature of the PV modules is affected by their surrounding microclimate, in turn depending on the water temperature and the thermo-hygrometric conditions induced by the presence of water.
- Efficiency Degradation of the PV Modules over time. The hygrometric conditions in which the PV modules operate can impact their efficiency over time, potentially leading to a loss of performance.
3.1.1. Variable Module Positioning
3.1.2. PV Module Temperature
3.1.3. Loss of Efficiency of PV Modules Over Time
3.1.4. Effects of Soiling on FPV
3.1.5. Monitoring via UAV
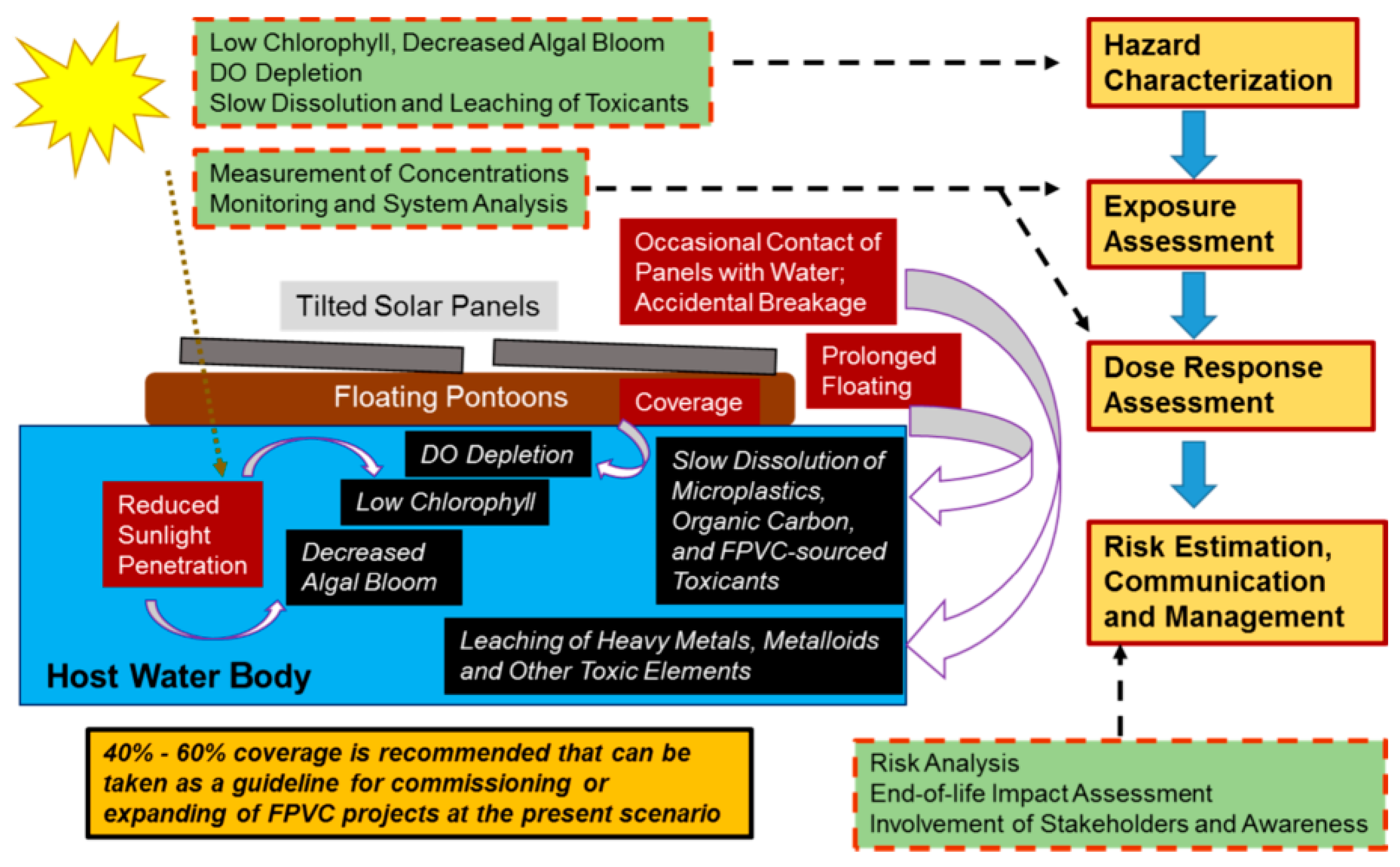
3.2. Monitoring FPV Systems for Evaluating Their Impact on Water Ecosystem
4. Sensors for Water Quality Monitoring
5. Technologies for Autonomous Water Basin Mapping and Monitoring
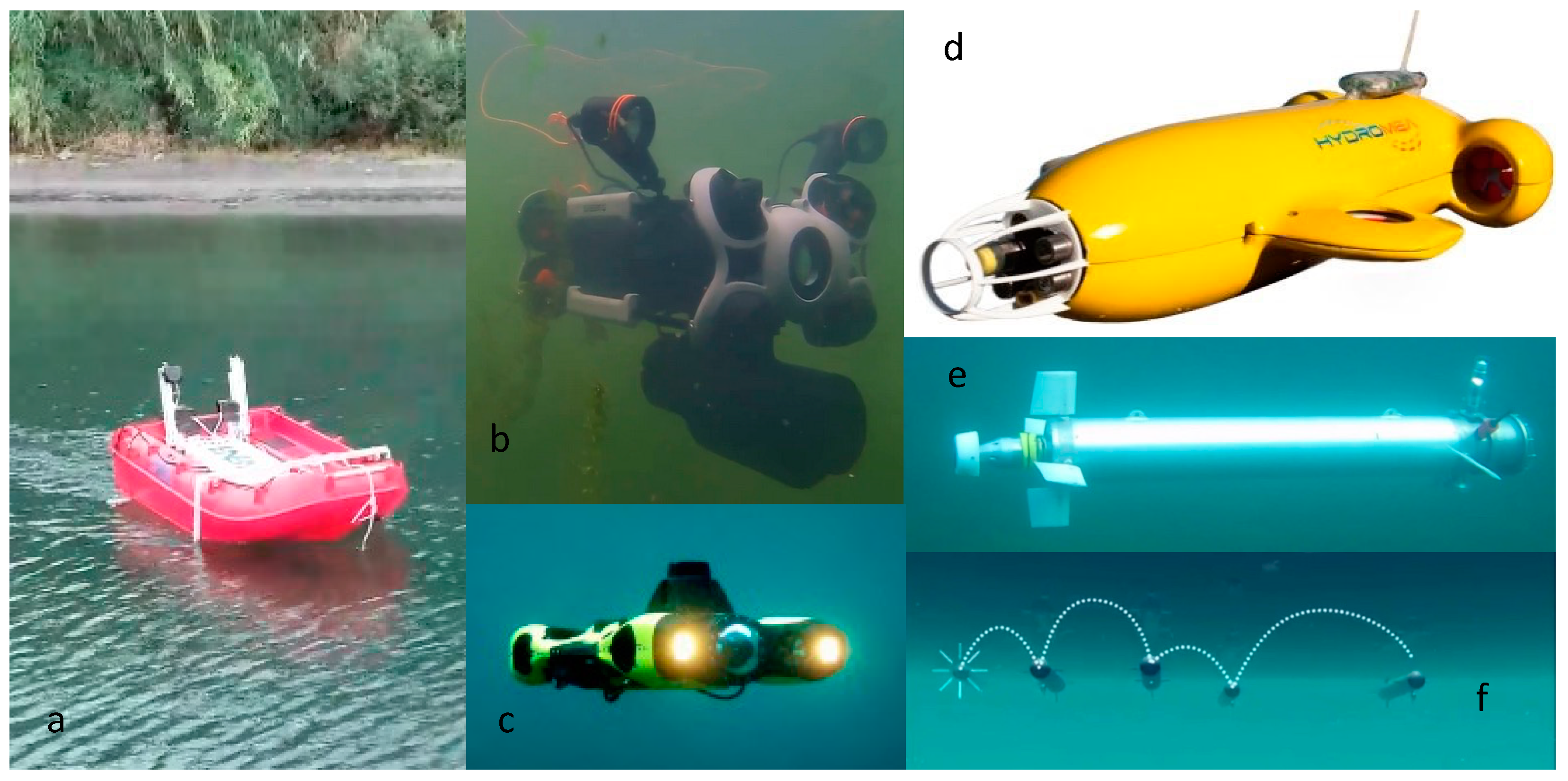
5.1. State of the Art of Surface and Underwater Robotic Systems
- ASVs (autonomous surface vehicles), also called USVs (unmanned surface vehicles), are boats controlled by an autopilot, commonly linked to a ground station through at least one radio trans-receiver (for sending telemetry data) and to a radio-controller through a radio receiver module aboard the vessel, enabling manual recovery of the ASV or failsafe functions at any time. Positions, trajectories, and all on-board data acquired aboard the vessel are available on the ground station (or directly in a control room), making it possible to set waypoints of interest and let the robot follow them automatically.
- ROVs (Remotely Operating Vehicles), due to their cost-effectiveness, excellent maneuverability and on-line acquisition capability, represent the current commercial tool for widespread use in underwater exploration. Some ROVs configurations can be equipped with an extension module, enabling the tethered cable to supply the energy required for an indefinite time due to the availability of an electrical socket on the surface.
- AUVs (Autonomous Underwater Vehicles), unlike ROVs, are characterized by the absence of a tethering cable, relying on a battery pack for power supply and off-line data acquisition capabilities. Indefinite operation requires permanent electrical recharge/docking/recovery stations. The cost of these vehicles increases with the number of sensors fitted on-board. The more automated and powerful the vehicle, the more complex the missions it can perform.
5.2. Issues Related to Robotic Systems
5.2.1. Localization Issues
5.2.2. Data Transmission
5.2.3. Energy Autonomy and Environmental Impact
5.2.4. Operation and Maintenance
6. A Case Study for an FPV Autonomous Monitoring System

7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nijsse, F.J.M.M.; Mercure, J.F.; Ameli, N.; Larosa, F.; Kothari, S.; Rickman, J.; Vercoulen, P.; Pollitt, H. The momentum of the solar energy transition. Nat. Commun. 2023, 14, 6542. [Google Scholar] [CrossRef] [PubMed]
- Nøland, J.K.; Auxepaules, J.; Rousset, A.; Perney, B.; Falletti, G. Spatial energy density of large-scale electricity generation from power sources worldwide. Sci. Rep. 2022, 12, 21280. [Google Scholar] [CrossRef] [PubMed]
- Bolinger, M.; Bolinger, G. Land Requirements for Utility-Scale PV: An Empirical Update on Power and Energy Density. IEEE J. Photovolt. 2022, 12, 589–594. [Google Scholar] [CrossRef]
- Capellán-Pérez, I.; Castro, C.; Arto, I. Assessing vulnerabilities and limits in the transition to renewable energies: Land requirements under 100% solar energy scenarios. Renew. Sustain. Energy Rev. 2017, 77, 760–782. [Google Scholar] [CrossRef]
- Sargentis, G.-F.; Siamparina, P.; Sakki, G.-K.; Efstratiadis, A.; Chiotinis, M.; Koutsoyiannis, D. Agricultural Land or Photovoltaic Parks? The Water–Energy–Food Nexus and Land Development Perspectives in the Thessaly Plain, Greece. Sustainability 2021, 13, 8935. [Google Scholar] [CrossRef]
- Cagle, A.E.; Armstrong, A.; Exley, G.; Grodsky, S.M.; Macknick, J.; Sherwin, J.; Hernandez, R.R. The Land Sparing, Water Surface Use Efficiency, and Water Surface Transformation of Floating Photovoltaic Solar Energy Installations. Sustainability 2020, 12, 8154. [Google Scholar] [CrossRef]
- Floating PV on a Quarry Lake in Southern Germany. Available online: https://www.pv-magazine.com/2020/11/16/floating-pv-on-a-quarry-lake-in-southern-germany/ (accessed on 19 September 2024).
- Trapani, K.; Redõn Santafé, M. A review of floating photovoltaic installations: 2007–2013. Prog. Photovolt. Res. Appl. 2015, 23, 524–532. [Google Scholar] [CrossRef]
- Amiot, B.; Le Berre, R.; Giroux-Julien, S. Evaluation of thermal boundary conditions in floating photovoltaic systems. Prog. Photovolt. Res. Appl. 2023, 31, 251–268. [Google Scholar] [CrossRef]
- Bontempo Scavo, F.; Tina, G.M.; Gagliano, A.; Nižetić, S. An assessment study of evaporation rate models on a water basin with floating photovoltaic plants. Int. J. Energy Res. 2021, 45, 167–188. [Google Scholar] [CrossRef]
- Prefab Floating Solar for Easy Installation. Available online: https://www.pv-magazine.com/2022/06/28/prefab-floating-solar-for-easy-installation/ (accessed on 19 September 2024).
- Rosa-Clot, M. (Pisa, Italy). Private communication. 2024. [Google Scholar]
- Hernández-Callejo, L.; Gallardo-Saavedra, S.; Alonso-Gómez, V. A Review of Photovoltaic Systems: Design, Operation and Maintenance. Sol. Energy 2019, 188, 426–440. [Google Scholar] [CrossRef]
- Chen, X.; Zhou, W. Performance Evaluation of Aquavoltaics in China: Retrospect and Prospect. Renew. Sustain. Energy Rev. 2023, 173, 113109. [Google Scholar] [CrossRef]
- Hu, J.; Teng, K.; Li, C.; Li, X.; Wang, J.; Lund, P.D. Review of Recent Water Photovoltaics Development. Oxf. Open Energy 2023, 2, oiad005. [Google Scholar] [CrossRef]
- Cazzaniga, R.; Cicu, M.; Rosa-Clot, M.; Rosa-Clot, P.; Tina, G.M.; Ventura, C. Floating Photovoltaic Plants: Performance Analysis and Design Solutions. Renew. Sustain. Energy Rev. 2018, 81, 1730–1741. [Google Scholar] [CrossRef]
- Rosa-Clot, M.; Marco Tina, G. Chapter 7—Tracking Systems. In Floating PV Plants; Rosa-Clot, M., Marco Tina, G., Eds.; Academic Press: Cambridge, MA, USA, 2020; pp. 79–87. [Google Scholar] [CrossRef]
- Shi, W.; Yan, C.; Ren, Z.; Yuan, Z.; Liu, Y.; Zheng, S.; Li, X.; Han, X. Review on the Development of Marine Floating Photovoltaic Systems. Ocean Eng. 2023, 286, 115560. [Google Scholar] [CrossRef]
- Wu, S.; Jiang, N.; Zhang, S.; Zhang, P.; Zhao, P.; Liu, Y.; Wang, Y. Discussion on the Development of Offshore Floating Photovoltaic Plants, Emphasizing Marine Environmental Protection. Front. Mar. Sci. 2024, 11, 1336783. [Google Scholar] [CrossRef]
- Claus, R.; López, M. Key Issues in the Design of Floating Photovoltaic Structures for the Marine Environment. Renew. Sustain. Energy Rev. 2022, 164, 112502. [Google Scholar] [CrossRef]
- World Bank Group; ESMAP; SERIS. Where Sun Meets Water: Floating Solar Market Report; World Bank: Washington, DC, USA, 2019. Available online: http://documents.worldbank.org/curated/en/670101560451219695/Floating-Solar-Market-Report (accessed on 19 September 2024).
- Sobolewski, K.; Sobieska, E. Lightning Protection of Floating Photovoltaic Power Plants—Simulation Analysis of Sample Solutions. Energies 2023, 16, 4222. [Google Scholar] [CrossRef]
- Ghosh, A. A Comprehensive Review of Water Based PV: Flotavoltaics, under Water, Offshore & Canal Top. Ocean Eng. 2023, 281, 115044. [Google Scholar] [CrossRef]
- Gorjian, S.; Sharon, H.; Ebadi, H.; Kant, K.; Scavo, F.B.; Tina, G.M. Recent Technical Advancements, Economics and Environmental Impacts of Floating Photovoltaic Solar Energy Conversion Systems. J. Clean. Prod. 2021, 278, 124285. [Google Scholar] [CrossRef]
- Acharya, M.; Devraj, S. Floating Solar Photovoltaic (FSPV): A Third Pillar to Solar PV Sector? TERI Discussion Paper; Output of the ETC India Project (The Energy and Resources Institute): New Delhi, India, 2019. [Google Scholar]
- Mayville, P.; Patil, N.V.; Pearce, J.M. Distributed Manufacturing of after Market Flexible Floating Photovoltaic Modules. Sustain. Energy Technol. Assess. 2020, 42, 100830. [Google Scholar] [CrossRef]
- Trapani, K.; Millar, D.L. The Thin Film Flexible Floating PV (T3F-PV) Array: The Concept and Development of the Prototype. Renew. Energy 2014, 71, 43–50. [Google Scholar] [CrossRef]
- Kanotra, R.; Shankar, R. Floating Solar Photovoltaic Mooring System Design and Analysis. In Proceedings of the OCEANS 2022—Chennai, Chennai, India, 21–24 February 2022; pp. 1–9. [Google Scholar] [CrossRef]
- Rosa-Clot, M.; Tina, G.M. Submerged and Floating Photovoltaic Systems. Rosa-Clot, M., Tina, G.M., Eds.; Academic Press: Cambridge, MA, USA, 2018; Chapter 8; pp. 185–212. [Google Scholar] [CrossRef]
- DNV. Design, Development and Operation of Floating Solar Photovoltaic Systems. DNV-RP-0584, March 2021; amended October 2021. Available online: https://brandcentral.dnv.com/fr/gallery/10651/others/0338546af264473e8481ba6ea78daf0f_hi.pdf (accessed on 19 September 2024).
- Alcañiz, A.; Monaco, N.; Isabella, O.; Ziar, H. Offshore Floating PV–DC and AC Yield Analysis Considering Wave Effects. Energy Convers. Manag. 2024, 300, 117897. [Google Scholar] [CrossRef]
- Bugeja, R.; Mule’ Stagno, L.; Dexarcis, L. An Offshore Solar Irradiance Calculator (OSIC) Applied to Photovoltaic Tracking Systems. Energies 2023, 16, 3735. [Google Scholar] [CrossRef]
- Nurhakim, A.; Effendi, M.R.; Saputra, H.M.; Mardiati, R.; Priatna, T.; Ismail, N. A Novel Approach to Calculating Yaw Angles Using an Accelerometer Sensor. In Proceedings of the 2019 IEEE 5th International Conference on Wireless and Telematics (ICWT), Yogyakarta, Indonesia, 25–26 July 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Delacroix, S.; Bourdier, S.; Soulard, T.; Elzaabalawy, H.; Vasilenko, P. Experimental Modelling of a Floating Solar Power Plant Array under Wave Forcing. Energies 2023, 16, 5198. [Google Scholar] [CrossRef]
- Rossi, G.B.; Cannata, A.; Iengo, A.; Migliaccio, M.; Nardone, G.; Piscopo, V.; Zambianchi, E. Measurement of Sea Waves. Sensors 2021, 22, 78. [Google Scholar] [CrossRef]
- Choi, Y.-K.; Lee, N.-H.; Lee, A.-K.; Kim, K.-J. A Study on Major Design Elements of Tracking-Type Floating Photovoltaic Systems. SGCE 2014, 3, 70–74. [Google Scholar] [CrossRef]
- Micheli, L. The Temperature of Floating Photovoltaics: Case Studies, Models and Recent Findings. Sol. Energy 2022, 242, 234–245. [Google Scholar] [CrossRef]
- Santos, L.D.O.; De Carvalho, P.C.M.; Filho, C.D.O.C. Photovoltaic Cell Operating Temperature Models: A Review of Correlations and Parameters. IEEE J. Photovolt. 2022, 12, 179–190. [Google Scholar] [CrossRef]
- Peters, I.M.; Nobre, A.M. Deciphering the Thermal Behavior of Floating Photovoltaic Installations. Sol. Energy Adv. 2022, 2, 100007. [Google Scholar] [CrossRef]
- Tina, G.M.; Bontempo Scavo, F.; Merlo, L.; Bizzarri, F. Analysis of Water Environment on the Performances of Floating Photovoltaic Plants. Renew. Energy 2021, 175, 281–295. [Google Scholar] [CrossRef]
- Lindholm, D.; Selj, J.; Kjeldstad, T.; Fjær, H.; Nysted, V. CFD Modelling to Derive U-Values for Floating PV Technologies with Large Water Footprint. Sol. Energy 2022, 238, 238–247. [Google Scholar] [CrossRef]
- Hamdi, R.T.A.; Hafad, S.A.; Kazem, H.A.; Chaichan, M.T. Humidity Impact on Photovoltaic Cells Performance: A Review. Int. J. Recent Eng. Res. Dev. 2018, 3, 27–37. [Google Scholar]
- Luo, W.; Isukapalli, S.N.; Vinayagam, L.; Ting, S.A.; Pravettoni, M.; Reindl, T.; Kumar, A. Performance Loss Rates of Floating Photovoltaic Installations in the Tropics. Sol. Energy 2021, 219, 58–64. [Google Scholar] [CrossRef]
- Shaju, A.; Chacko, R. Soiling of Photovoltaic Modules—Review. IOP Conf. Ser. Mater. Sci. Eng. 2018, 396, 012050. [Google Scholar] [CrossRef]
- Francia, D.F.; De Vito, S.; Fattoruso, G.; Matano, A. Energy transition: An analysis of agrivoltaic utilities suitability in terms of Levelized Cost of Electric Energy. In Proceedings of the Global Energy Transition Toward Decarbonization: A Multi-Scalar Perspective and Transformation, Milan, Italy, 24–27 July 2023. [Google Scholar]
- Willers, G.; Naumann, V.; Holzlohner, R.; Gottschalg, R.; Ilse, K. Analysis of Threshold Conditions for Cementation of Soiling on PV Modules and Telescope Mirrors. IEEE J. Photovolt. 2024, 14, 330–336. [Google Scholar] [CrossRef]
- Dewi, T.; Taqwa, A.; Rusdianasari; Kusumanto, R.D.; Sitompul, C.R. The Investigation of Sea Salt Soiling on PV Panel. In Proceedings of the 4th Forum in Research, Science, and Technology (FIRST-T1-T2-2020), Palembang, Indonesia, 10-11 November 2020; Atlantis Press: Amsterdam, The Netherlands, 2021; pp. 141–147. [Google Scholar] [CrossRef]
- Boeing, A.; Neda, M.; Steinberg, S.; Batista, J. The Impact of Lower Quality Water on Soiling Removal from Photovoltaic Panels. Renew. Sustain. Energy Rev. 2022, 169, 112870. [Google Scholar] [CrossRef]
- Nordin, M.; Sharma, S.; Khan, A.; Gianni, M.; Rajendran, S.; Sutton, R. Collaborative Unmanned Vehicles for Inspection, Maintenance, and Repairs of Offshore Wind Turbines. Drones 2022, 6, 137. [Google Scholar] [CrossRef]
- NPR. Solar Energy Project Location Debate. NPR [Internet]. 18 June 2023. Available online: https://www.npr.org/2023/06/18/1177524841/solar-energy-project-location-debate (accessed on 10 July 2024).
- Mirletz, H.; Hieslmair, H.; Ovaitt, S.; Curtis, T.L.; Barnes, T.M. Unfounded Concerns about Photovoltaic Module Toxicity and Waste Are Slowing Decarbonization. Nat. Phys. 2023, 19, 1376–1378. [Google Scholar] [CrossRef]
- Gunerhan, H.; Hepbasli, A.; Giresunlu, U. Environmental Impacts from the Solar Energy Systems. Energy Sources Part A Recovery Util. Environ. Eff. 2008, 31, 131–138. [Google Scholar] [CrossRef]
- Exley, G.; Page, T.; Thackeray, S.J.; Folkard, A.M.; Couture, R.-M.; Hernandez, R.R.; Cagle, A.E.; Salk, K.R.; Clous, L.; Whittaker, P.; et al. Floating Solar Panels on Reservoirs Impact Phytoplankton Populations: A Modelling Experiment. J. Environ. Manag. 2022, 324, 116410. [Google Scholar] [CrossRef]
- Exley, G.; Hernandez, R.R.; Page, T.; Chipps, M.; Gambro, S.; Hersey, M.; Lake, R.; Zoannou, K.-S.; Armstrong, A. Scientific and Stakeholder Evidence-Based Assessment: Ecosystem Response to Floating Solar Photovoltaics and Implications for Sustainability. Renew. Sustain. Energy Rev. 2021, 152, 111639. [Google Scholar] [CrossRef]
- Haas, J.; Khalighi, J.; De La Fuente, A.; Gerbersdorf, S.U.; Nowak, W.; Chen, P.-J. Floating Photovoltaic Plants: Ecological Impacts versus Hydropower Operation Flexibility. Energy Convers. Manag. 2020, 206, 112414. [Google Scholar] [CrossRef]
- Stichting Toegepast Onderzoek Waterbeheer. Zonneparken Versie Maart 2019; STOWA: Amersfoort, The Netherlands, 2019; Available online: https://www.stowa.nl/sites/default/files/assets/PUBLICATIES/Publicaties%202018/STOWA%202018-73%20Zonneparken%20versie%20maart%202019.pdf (accessed on 19 September 2024).
- Ribeiro, H.V.; Acre, M.R.; Faulkner, J.D.; Da Cunha, L.R.; Lawson, K.M.; Wamboldt, J.J.; Brey, M.K.; Woodley, C.M.; Calfee, R.D. Effects of Shady Environments on Fish Collective Behavior. Sci. Rep. 2022, 12, 17873. [Google Scholar] [CrossRef] [PubMed]
- Misman, N.A.; Sharif, M.F.; Chowdhury, A.J.K.; Azizan, N.H. Water Pollution and the Assessment of Water Quality Parameters: A Review. Desalin. Water Treat. 2023, 294, 79–88. [Google Scholar] [CrossRef]
- Yang, P.; Chua, L.H.C.; Irvine, K.N.; Nguyen, M.T.; Low, E.-W. Impacts of a Floating Photovoltaic System on Temperature and Water Quality in a Shallow Tropical Reservoir. Limnology 2022, 23, 441–454. [Google Scholar] [CrossRef]
- Al-Widyan, M.; Khasawneh, M.; Abu-Dalo, M. Potential of Floating Photovoltaic Technology and Their Effects on Energy Output, Water Quality and Supply in Jordan. Energies 2021, 14, 8417. [Google Scholar] [CrossRef]
- Ilgen, K.; Schindler, D.; Wieland, S.; Lange, J. The Impact of Floating Photovoltaic Power Plants on Lake Water Temperature and Stratification. Sci. Rep. 2023, 13, 7932. [Google Scholar] [CrossRef]
- Bai, Q.; Li, R.; Li, Z.; Leppäranta, M.; Arvola, L.; Li, M. Time-Series Analyses of Water Temperature and Dissolved Oxygen Concentration in Lake Valkea-Kotinen (Finland) during Ice Season. Ecol. Inform. 2016, 36, 181–189. [Google Scholar] [CrossRef]
- Liu, Z.; Ma, C.; Li, X.; Deng, Z.; Tian, Z. Aquatic Environment Impacts of Floating Photovoltaic and Implications for Climate Change Challenges. J. Environ. Manag. 2023, 346, 118851. [Google Scholar] [CrossRef]
- Wang, T.; Chang, P.; Huang, Y.; Lin, T.; Yang, S.; Yeh, S.; Tung, C.; Kuo, S.; Lai, H.; Chen, C. Effects of Floating Photovoltaic Systems on Water Quality of Aquaculture Ponds. Aquac. Res. 2022, 53, 1304–1315. [Google Scholar] [CrossRef]
- Bhattacharya, M.; Kumar, A.; Nema, A.K.; Das, S.; Vijayanandan, A. Making a Case for Environmental Risk-Based Monitoring of Floating Solar Systems. Environ. Sci. Technol. 2024, 58, 2595–2597. [Google Scholar] [CrossRef]
- Atikah, R.H.; Wahyuningsih, N.P.S.; Suwartha, N.; Setiawan, E.A. Spatial Analysis of Water Quality Parameters Concentration around the Floating Solar Panel Installation in Lake Mahoni, Depok, Indonesia. E3S Web Conf. 2024, 485, 01010. [Google Scholar] [CrossRef]
- Song, F.; Lu, Z.; Guo, Z.; Wang, Y.; Ma, L. The Effects of a Fishery Complementary Photovoltaic Power Plant on the Near-Surface Meteorology and Water Quality of Coastal Aquaculture Ponds. Water 2024, 16, 526. [Google Scholar] [CrossRef]
- Vlaswinkel, B.; Roos, P.; Nelissen, M. Environmental Observations at the First Offshore Solar Farm in the North Sea. Sustainability 2023, 15, 6533. [Google Scholar] [CrossRef]
- De Lima, R.L.P.; Paxinou, K.; Boogaard, F.C.; Akkerman, O.; Lin, F.-Y. In-Situ Water Quality Observations under a Large-Scale Floating Solar Farm Using Sensors and Underwater Drones. Sustainability 2021, 13, 6421. [Google Scholar] [CrossRef]
- Ubina, N.A.; Cheng, S.-C. A Review of Unmanned System Technologies with Its Application to Aquaculture Farm Monitoring and Management. Drones 2022, 6, 12. [Google Scholar] [CrossRef]
- De Lima, R.L.P.; De Graaf-van Dinther, R.E.; Boogaard, F.C. Impacts of Floating Urbanization on Water Quality and Aquatic Ecosystems: A Study Based on In Situ Data and Observations. J. Water Clim. Chang. 2022, 13, 1185–1203. [Google Scholar] [CrossRef]
- Chatziantoniou, A.; Papandroulakis, N.; Stavrakidis-Zachou, O.; Spondylidis, S.; Taskaris, S.; Topouzelis, K. Aquasafe: A Remote Sensing, Web-Based Platform for the Support of Precision Fish Farming. Appl. Sci. 2023, 13, 6122. [Google Scholar] [CrossRef]
- Bao, H.; Zhang, Y.; Song, M.; Kong, Q.; Hu, X.; An, X. A Review of Underwater Vehicle Motion Stability. Ocean Eng. 2023, 287, 115735. [Google Scholar] [CrossRef]
- YSI Inc. YSI EXO Multiparameter Water Quality Sondes. Available online: https://www.ysi.com/file%20library/documents/brochures%20and%20catalogs/ysi-exo-brochure.pdf (accessed on 19 September 2024).
- YSI Inc. YSI 6920 V2-2 Multiparameter Water Quality Sondes. Available online: https://www.ysi.com/6920-v2-2 (accessed on 19 September 2024).
- Quadlink Tech. Aquadlink® Smart Aquaculture Application System. Available online: https://www.quadlink-tech.com/en/a4-11108-14327/Aquadlink%C2%AESmart-Aquaculture-Application-System.html (accessed on 19 September 2024).
- Myron L. Ultrapen PT1; Myron L: Carlsbad, CA, USA, 2024. Available online: https://www.myronl.com/products/handheld-portable-instruments/ultrapen-pt1/?gad_source=1&gclid=Cj0KCQjw7ZO0BhDYARIsAFttkCjR7sQRJ3sgPw4j1wK9lzwPxDoptNmhcrqKIY5AyNtjv1LHsXB82KQaAijJEALw_wcB (accessed on 4 July 2024).
- De Lima, R.L.P.; Boogaard, F.C.; De Graaf-van Dinther, R.E. Innovative Water Quality and Ecology Monitoring Using Underwater Unmanned Vehicles: Field Applications, Challenges and Feedback from Water Managers. Water 2020, 12, 1196. [Google Scholar] [CrossRef]
- In-Situ Inc. TROLL® 9500 Multiparameter Water Quality Monitoring Instrument. Available online: https://www.inmtn.com/docs/IEI_Troll9500_bro.pdf (accessed on 19 September 2024).
- Van Essen Instruments. CTD Diver—Downloads; Van Essen Instruments: Delft, The Netherlands, 2024; Available online: https://www.vanessen.com/products/data-loggers/ctd-diver/#tab-downloads (accessed on 4 July 2024).
- AQUAREAD. AP-2000/2000-D Advanced Multiparameter Water Quality Probes. Available online: https://www.aquaread.com/products/water-quality/ap-2000 (accessed on 19 September 2024).
- PME. PME miniDOT Dissolved Oxygen Logger Specifications. Fondriest Environmental. Available online: https://www.fondriest.com/pme-minidot-dissolved-oxygen-logger.htm (accessed on 4 July 2024).
- Germ, M.; Tertinek, Ž.; Zelnik, I. Diversity of Macrophytes and Macroinvertebrates in Different Types of Standing Waters in the Drava Field. Water 2024, 16, 1130. [Google Scholar] [CrossRef]
- Aquaread. AP-7000; Aquaread: Broadstairs, UK, 2020; Available online: https://www.aquaread.com/products/water-quality/ap-7000 (accessed on 4 July 2024).
- Krohkaew, J.; Nilaphruek, P.; Witthayawiroj, N.; Uapipatanakul, S.; Thwe, Y.; Crisnapati, P.N. Thailand Raw Water Quality Dataset Analysis and Evaluation. Data 2023, 8, 141. [Google Scholar] [CrossRef]
- Eureka Water Probes. Sonde Multiparametriche per Operatori di Campo. Manta+. Available online: https://www.waterprobes.com/product-page/manta-35 (accessed on 19 September 2024).
- Liu, X.; Georgakakos, A.P. Chlorophyll a Estimation in Lakes Using Multi-Parameter Sonde Data. Water Res. 2021, 205, 117661. [Google Scholar] [CrossRef]
- Nazirova, K.; Alferyeva, Y.; Lavrova, O.; Shur, Y.; Soloviev, D.; Bocharova, T.; Strochkov, A. Comparison of In Situ and Remote-Sensing Methods to Determine Turbidity and Concentration of Suspended Matter in the Estuary Zone of the Mzymta River, Black Sea. Remote Sens. 2021, 13, 143. [Google Scholar] [CrossRef]
- RBR Global. RBRduo3 & RBRconcerto3|C.T, C.T.D, C.T.D++; RBR Global: Ottawa, ON, Canada, 2024; Available online: https://rbr-global.com/products/standard-loggers (accessed on 4 July 2024).
- Salas-Cueva, N.F.; Mendoza, J.; Cutipa-Luque, J.C.; Yanyachi, P.R. An Open-Source Wireless Platform for Real-Time Water Quality Monitoring with Precise Global Positioning. Int. J. Adv. Comput. Sci. Appl. 2021, 12, 775–782. [Google Scholar] [CrossRef]
- In-Situ. Aqua TROLL 500-600-700-800 Spec Sheet. Available online: https://in-situ.com/pub/media/support/documents/Aqua-TROLL-500-600-700-800_Spec-Sheet_ltr_en.pdf (accessed on 4 July 2024).
- Boehrer, B.; Saiki, K.; Ohba, T.; Tanyileke, G.; Rouwet, D.; Kusakabe, M. Carbon Dioxide in Lake Nyos, Cameroon, Estimated Quantitatively from Sound Speed Measurements. Front. Earth Sci. 2021, 9, 645011. [Google Scholar] [CrossRef]
- Idronaut. IDRONAUT OCEAN SEVEN 316Plus CTD for Oceanography; Idronaut: Brugherio, Italy, 2023; Available online: www.idronaut.it/wp-content/uploads/2021/10/oceanseven316plus-leaflet.pdf (accessed on 4 July 2024).
- Marsili-Libelli, S. Fuzzy Prediction of the Algal Blooms in the Orbetello Lagoon. Environ. Model. Softw. 2004, 19, 799–808. [Google Scholar] [CrossRef]
- Di Natale, C.; Davide, F.; D’Amico, A.; Legin, A.; Rudinitskaya, A.; Selezenev, B.; Vlasov, Y. Technical Digest of Eurosensors X; Eurosensors Association: Leuven, Belgium, 1996; pp. 1345–1348. [Google Scholar]
- Yu, V.; Legin, A.; Rudnitskaya, A.; Di Natale, C.; D’Amico, A. Nonspecific Sensor Arrays (“Electronic Tongue”) for Chemical Analysis of Liquids. Pure Appl. Chem 2005, 77, 1965–1983. [Google Scholar]
- Tønning, E.; Sapelnikova, S.; Christensen, J.; Carlsson, C.; Winther-Nielsen, M.; Dock, E.; Solna, R.; Skladal, P.; Nørgaard, L.; Ruzgas, T.; et al. Chemometric Exploration of an Amperometric Biosensor Array for Fast Determination of Wastewater Quality. Biosens. Bioelectron. 2005, 21, 608–617. [Google Scholar] [CrossRef]
- Gabrieli, G.; Muszynski, M.; Ruch, P.W. Feature Importance Methods Unveiling the Cross-Sensitive Response of an Integrated Sensor Array to Quantify Major Cations in Drinking Water. In Proceedings of the 2022 IEEE Sensors, Dallas, TX, USA, 30 October 2022–2 November 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Martınez-Máñez, R.; Soto, J.; Garcia-Breijo, E.; Gil, L.; Ibáñez, J.; Llobet, E. An “Electronic Tongue” Design for the Qualitative Analysis of Natural Waters. Sens. Actuators B Chem. 2005, 104, 302–307. [Google Scholar] [CrossRef]
- Mimendia, A.; Gutiérrez, J.M.; Leija, L.; Hernández, P.R.; Favari, L.; Muñoz, R.; Del Valle, M. A Review of the Use of the Potentiometric Electronic Tongue in the Monitoring of Environmental Systems. Environ. Model. Softw. 2010, 25, 1023–1030. [Google Scholar] [CrossRef]
- Cetó, X.; Valle, M.D. Electronic Tongue Applications for Wastewater and Soil Analysis. iScience 2022, 25, 104304. [Google Scholar] [CrossRef]
- Campos, I.; Alcañiz, M.; Aguado, D.; Barat, R.; Ferrer, J.; Gil, L.; Marrakchi, M.; Martínez-Mañez, R.; Soto, J.; Vivancos, J.L. A voltammetric electronic tongue as tool for water quality monitoring in wastewater treatment plants. Water Res. 2012, 46, 2605–2614. [Google Scholar] [CrossRef]
- Cruz, M.G.N.; Ferreira, N.S.; Gomes, M.T.S.R.; Botelho, M.J.; Costa, S.T.; Vale, C.; Rudnitskaya, A. Determination of Paralytic Shellfish Toxins Using Potentiometric Electronic Tongue. Sens. Actuators B Chem. 2018, 263, 550–556. [Google Scholar] [CrossRef]
- Ruch, P.W.; Hu, R.; Capua, L.; Temiz, Y.; Paredes, S.; Lopez, A.; Barroso, J.; Cox, A.; Nakamura, E.; Matsumoto, K. A Portable Potentiometric Electronic Tongue Leveraging Smartphone and Cloud Platforms. In Proceedings of the 2019 IEEE International Symposium on Olfaction and Electronic Nose (ISOEN), Fukuoka, Japan, 26–29 May 2019; pp. 1–3. [Google Scholar] [CrossRef]
- Arzamendia, M.; Britez, D.; Recalde, G.; Gomez, V.; Santacruz, M.; Gregor, D.; Gutierrez, D.; Toral, S.; Cuellar, F. An Autonomous Surface Vehicle for Water Quality Measurements in a Lake Using MQTT Protocol. In Proceedings of the 2021 IEEE CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Valparaíso, Chile, 6–9 December 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Beshah, W.T.; Moorhead, J.; Dash, P.; Moorhead, R.J.; Herman, J.; Sankar, M.S.; Chesser, D.; Lowe, W.; Simmerman, J.; Turnage, G. IoT Based Real-Time Water Quality Monitoring and Visualization System Using an Autonomous Surface Vehicle. In Proceedings of the OCEANS 2021: San Diego—Porto, San Diego, CA, USA, 20–23 September 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Kaushal, P.; Mudhalwadkar, R.P. Internet of Things Enabled Electronic Tongue for Remote Monitoring of Water Quality. In Smart Sensors Measurements and Instrumentation; Santhosh, K.V., Guruprasad, R.K., Eds.; Springer: Singapore, 2021; pp. 71–79. [Google Scholar]
- Mayflower: World’s Cleverest Robotic Ship Gets Ready to Cross and Study the Atlantic. Available online: https://research.ibm.com/blog/mayflower-to-cross-the-atlantic (accessed on 11 July 2024).
- Rudnitskaya, A. Calibration Update and Drift Correction for Electronic Noses and Tongues. Front. Chem. 2018, 6, 433. [Google Scholar] [CrossRef]
- Simmerman, J.; Chesser, G.D.; Lowe, J.W.; Moorhead, J.; Beshah, W.; Turnage, G.; Dash, P.; Sankar, M.S.; Moorhead, R.; Herman, J. Evaluation of the Utility and Performance of an Autonomous Surface Vehicle for Mobile Monitoring of Waterborne Biochemical Agents. In Proceedings of the OCEANS 2021: San Diego—Porto, San Diego, CA, USA, 20–23 September 2021; pp. 1–10. [Google Scholar] [CrossRef]
- Gentemann, C.L.; Scott, J.P.; Mazzini, P.L.F.; Pianca, C.; Akella, S.; Minnett, P.J.; Cornillon, P.; Fox-Kemper, B.; Cetinić, I.; Chin, T.M.; et al. Saildrone: Adaptively Sampling the Marine Environment. Bull. Am. Meteorol. Soc. 2020, 101, E744–E762. [Google Scholar] [CrossRef]
- Steccanella, L.; Bloisi, D.D.; Castellini, A.; Farinelli, A. Waterline and Obstacle Detection in Images from Low-Cost Autonomous Boats for Environmental Monitoring. Robot. Auton. Syst. 2020, 124, 103346. [Google Scholar] [CrossRef]
- Manley, J.E. Unmanned Surface Vehicles, 15 Years of Development. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–4. [Google Scholar] [CrossRef]
- Christ, R.D.; Wernli, R.L. The ROV Manual: A User Guide for Observation-Class Remotely Operated Vehicles, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Enterprise Grade ROV Platform Powerful & Precise, Advanced Add-Ons, Exceptional Stability, Superior Battery. Available online: https://www.qysea.com/products/fifish-w6/ (accessed on 5 July 2024).
- Vedachalam, N.; Ramesh, R.; Jyothi, V.B.N.; Doss Prakash, V.; Ramadass, G.A. Autonomous Underwater Vehicles—Challenging Developments and Technological Maturity towards Strategic Swarm Robotics Systems. Mar. Georesour. Geotechnol. 2019, 37, 525–538. [Google Scholar] [CrossRef]
- Hydromea. EXRAY™ Leaflet 2024; Hydromea: Renens, Switzerland, 2024; Available online: https://files.hydromea.com/exray/EXRAY_leaflet_2024_Web.pdf (accessed on 19 September 2024).
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of Underwater Life with an Acoustically Controlled Soft Robotic Fish. Sci. Robot. 2018, 3, eaar3449. [Google Scholar] [CrossRef]
- Moriconi, C.; Cupertino, G.; Betti, S.; Tabacchiera, M. Hybrid Acoustic/Optic Communications in Underwater Swarms. In Proceedings of the OCEANS 2015—Genova, Genova, Italy, 18–21 May 2015; pp. 1–9. [Google Scholar] [CrossRef]
- UNEXMIN Project. Underwater Explorer for Flooded Mines. Horizon 2020, European Union. Available online: https://www.unexmin.eu/ (accessed on 15 July 2024).
- Ridolfi, A.; Costanzi, R.; Fanelli, F.; Monni, N.; Allotta, B.; Bianchi, S.; Conti, R.; Gelli, J.; Gori, L.; Pugi, L.; et al. FeelHippo: A Low-Cost Autonomous Underwater Vehicle for Subsea Monitoring and Inspection. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Hydromea. Autonomous Underwater Swarm. Available online: https://www.hydromea.com/_files/ugd/474ccd_0bd150d8e2194648b37b80d3b947f626.pdf (accessed on 5 July 2024).
- Bellingham, J.G.; Rajan, K. Robotics in Remote and Hostile Environments. Science 2007, 318, 1098–1102. [Google Scholar] [CrossRef]
- Yoerger, D.R.; Jakuba, M.; Bradley, A.M.; Bingham, B. Techniques for Deep Sea Near Bottom Survey Using an Autonomous Underwater Vehicle. In Robotics Research: Results of the 12th International Symposium ISRR; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Hagen, P.E.; Midtgaard, O.; Hasvold, O. Making AUVs Truly Autonomous. In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–4. [Google Scholar] [CrossRef]
- Walker, J.H.; Trembanis, A.C.; Miller, D.C. Assessing the Use of a Camera System within an Autonomous Underwater Vehicle for Monitoring the Distribution and Density of Sea Scallops (Placopecten magellanicus) in the Mid-Atlantic Bight. Fish. Bull. 2016, 114, 261–274. [Google Scholar] [CrossRef]
- Niccolai, A.; Grimaccia, F.; Lorenzo, G.D.; Araneo, R.; Ughi, F.; Polenghi, M. A Review of Floating PV Systems with a Techno-Economic Analysis. IEEE J. Photovolt. 2024, 14, 23–34. [Google Scholar] [CrossRef]
- Kinsey, J.C.; Eustice, R.M.; Whitcomb, L.L. A Survey of Underwater Vehicle Navigation: Recent Advances and New Challenges. In Proceedings of the 7th Conference on Maneuvering and Control of Marine Craft (MCMC’2006), Lisbon, Portugal, 20–22 September 2006; IFAC: Lisbon, Portugal, 2006; pp. 1–12. [Google Scholar]
- Heidemann, J.; Stojanovic, M.; Zorzi, M. Underwater Sensor Networks: Applications, Advances and Challenges. Phil. Trans. R. Soc. A 2012, 370, 158–175. [Google Scholar] [CrossRef]
- Pal, A.; Campagnaro, F.; Ashraf, K.; Rahman, M.R.; Ashok, A.; Guo, H. Communication for Underwater Sensor Networks: A Comprehensive Summary. ACM Trans. Sens. Netw. 2022, 19, 22. [Google Scholar] [CrossRef]
- Cai, W.; Liu, Z.; Zhang, M.; Wang, C. Cooperative Artificial Intelligence for Underwater Robotic Swarm. Robot. Auton. Syst. 2023, 164, 104410. [Google Scholar] [CrossRef]
- Campagnaro, F.; Calore, M.; Casari, P.; Calzado, V.S.; Cupertino, G.; Moriconi, C.; Zorzi, M. Measurement-Based Simulation of Underwater Optical Networks. In Proceedings of the OCEANS 2017—Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Glover, D.M.; Jenkins, W.J.; Doney, S.C. Modeling Methods for Marine Science. In Modeling Methods for Marine Science, 2nd ed.; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- Paul, D.; Devaprakasam, D.; Patil, S.; Agrawal, A. Floating Solar: A Review on the Comparison of Efficiency, Issues, and Projections with Ground-Mounted Solar Photovoltaics. Int. J. Sustain. Dev. Plan. 2023, 18, 3213–3228. [Google Scholar] [CrossRef]
- Ramanan, C.J.; Lim, K.H.; Kurnia, J.C.; Roy, S.; Bora, B.J.; Medhi, B.J. Towards Sustainable Power Generation: Recent Advancements in Floating Photovoltaic Technologies. Renew. Sustain. Energy Rev. 2024, 194, 114322. [Google Scholar] [CrossRef]
- dell’Erba, R. Determination of Spatial Configuration of an Underwater Swarm with Minimum Data. Int. J. Adv. Robot. Syst. 2015, 12, 97. [Google Scholar] [CrossRef]
- dell’Erba, R. Distance Estimations in Unknown Sea Underwater Conditions by Power LED for Robotics Swarms. Contin. Mech. Thermodyn. 2021, 33, 97–106. [Google Scholar] [CrossRef]
- dell’Erba, R. The Distances Measurement Problem for an Underwater Robotic Swarm: A Semi-Experimental Trial, Using Power LEDs, in Unknown Sea Water Conditions. Contin. Mech. Thermodyn. 2023, 35, 895–903. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, J.; Wang, J. Constrained Control of Autonomous Underwater Vehicles Based on Command Optimization and Disturbance Estimation. IEEE Trans. Ind. Electron. 2019, 66, 3627–3635. [Google Scholar] [CrossRef]
- RBR. RBR CT-UV and CTD-UV Instruments; RBR: Ottawa, Canada, 2023; Available online: https://rbr-global.com/wp-content/uploads/2023/12/RBR-CT-uv-and-CTD-uv-Instruments-RIG-0015699revA.pdf (accessed on 19 September 2024).
- RBR. Performance of Two RBRconcerto CTDs on OSNAP Mooring CF06; RBR: Ottawa, Canada, 2019; Available online: https://rbr-global.com/wp-content/uploads/2019/11/Performance-of-two-RBRconcerto-CTDs-on-OSNAP-mooring-CF06-20190409-1.pdf (accessed on 19 September 2024).
- RBR. Assessment of RBRcoda, T.ODO Performance on Long-Term Deployment and Profiling in Bedford Basin; RBR: Ottawa, Canada, 2020; Available online: https://rbr-global.com/wp-content/uploads/2020/02/0008419revC-Assessment-of-RBRcoda-T.ODO-performance-on-long-term-deployment-and-profiling-in-Bedford-Basin.pdf (accessed on 19 September 2024).
- Oceanology International. Trusted for Argo: RBR Sensors Receive Highest Argo Data Quality Designation. Oceanology International. 17 February 2023. Available online: https://inside.oceanologyinternational.com/2023/02/17/trusted-for-argo-rbr-sensors-receive-highest-argo-data-quality-designation/ (accessed on 19 September 2024).
- Lundesgaard, Ø.; Sundfjord, A.; Lind, S.; Nilsen, F.; Renner, A.H.H. Import of Atlantic Water and Sea Ice Controls the Ocean Environment in the Northern Barents Sea. Ocean Sci. 2022, 18, 1389–1418. [Google Scholar] [CrossRef]
- Ziar, H.; Prudon, B.; Lin, F.; Roeffen, B.; Heijkoop, D.; Stark, T.; Teurlincx, S.; De Senerpont Domis, L.; Goma, E.G.; Extebarria, J.G.; et al. Innovative Floating Bifacial Photovoltaic Solutions for Inland Water Areas. Prog. Photovolt. 2021, 29, 725–743. [Google Scholar] [CrossRef]
- Dever, M.; Owens, B.; Richards, C.; Wijffels, S.; Wong, A.; Shkvorets, I.; Halverson, M.; Johnson, G. Static and Dynamic Performance of the RBRargo3 CTD. J. Atmos. Ocean. Technol. 2022, 39, 1525–1539. [Google Scholar] [CrossRef]
- Teece, M.A. An Inexpensive Remotely Operated Vehicle for Underwater Studies. Limnol. Ocean Methods 2009, 7, 206–215. [Google Scholar] [CrossRef]
- Meng, L.; Hirayama, T.; Oyanagi, S. Underwater-Drone with Panoramic Camera for Automatic Fish Recognition Based on Deep Learning. IEEE Access 2018, 6, 17880–17886. [Google Scholar] [CrossRef]
- Kimball, P.W.; Clark, E.B.; Scully, M.; Richmond, K.; Flesher, C.; Lindzey, L.E.; Harman, J.; Huffstutler, K.; Lawrence, J.; Lelievre, S.; et al. The ARTEMIS Under-ice AUV Docking System. J. Field Robot. 2018, 35, 299–308. [Google Scholar] [CrossRef]
- Yan, X.; Liang, X.; Ouyang, W.; Liu, Z.; Liu, B.; Lan, J. A Review of Progress and Applications of Ship Shaft-Less Rim-Driven Thrusters. Ocean Eng. 2017, 144, 142–156. [Google Scholar] [CrossRef]
- Hydromea. DiskDrive Thruster Technology; Hydromea: Renens, Switzerland, 2024; Available online: https://www.hydromea.com/diskdrive-thruster-technology (accessed on 19 September 2024).
- Hydromea. Vertex Autonomous Underwater Swarm; Hydromea: Renens, Switzerland, 2024; Available online: https://www.hydromea.com/vertex-autonomous-underwater-swarm (accessed on 19 September 2024).
- Markelov, I.; Couture, R.; Fischer, R.; Haande, S.; Van Cappellen, P. Coupling Water Column and Sediment Biogeochemical Dynamics: Modeling Internal Phosphorus Loading, Climate Change Responses, and Mitigation Measures in Lake Vansjø, Norway. JGR Biogeosci. 2019, 124, 3847–3866. [Google Scholar] [CrossRef]
- Saloranta, T.M.; Andersen, T. MyLake—A Multi-Year Lake Simulation Model Code Suitable for Uncertainty and Sensitivity Analysis Simulations. Ecol. Model. 2007, 207, 45–60. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Possible Effects on the Ecosystem | Observed Effects in an FPV Plant |
|---|---|---|
| Submarine light intensity (W/m2) | The intensity of sunlight at different depths not only activates biological processes, but can also play a role in the migration of animal species. On the contrary, shading may also influence fish behavior, attracting fishes which perceive increased safety from predators or reducing interactions [57]. | Under an FPV system, UV reduction has been observed [59] |
| Turbidity (NTU/FNU) | Turbidity may be correlated to the presence of suspended particles. As it increases, the fraction of light that can reach underwater plants, either sessile or floating, decreases along with photosynthesis intensity. | A certain decrease in turbidity has been observed due to the lower presence of algae [60] under an FPV. |
| Water Temperature (°C) | The temperature of the water affects the chemical reaction kinetics and the overall concentration of dissolved oxygen. | The average temperature of the basin as a whole decreases by approximately 1°C as its occupation by the FPV increases from 0 to 90%. Correspondingly, the Schmidt stability index is almost halved [61]. |
| Dissolved Oxygen (mg/L) | It is an index of self-purification of water, and it gives direct and indirect information on bacterial activity, photosynthesis, and leads to stratification. | Dissolved oxygen tends to decrease in non-aerated basins [62] and is observed to decrease significantly below an FPV system [63]. |
| Chlorophyll-a (µg/L) | Chlorophyll a is a measure of the amount of algae growing in a water body. It can be used to classify the trophic condition of a water body. | A slight increase, however not statistically significant, is observed under the FPV plant [63], which seems in contradiction with what is reported in Ref. [60]. |
| pH | pH is an index of the healthiness of water. Normally between 6.5 and 8.5, it is modified as a result of the presence of pesticides or by the organic decomposition process. | A slight, although non-statistically significant, decrease under the FPV plant is reported in Ref. [63]. |
| Conductivity (S/m) | It may be correlated to various parameters such as salinity, i.e., the presence of positive and negative ions. Its variation may be an indication of water contamination. | A certain decrease is claimed in Ref. [64]. |
| Available Sensors (by Data Sheets) | Probe Features (by Data Sheets) | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ref. | FPV | Probe Name | Probe Mfr. | P/ Depth | T | σ | NTU/ FNU | DO | pH | I | Chl-a | Max Depth (m) | Weight (kg) | Ø (cm) | Lenght (cm) |
| Vlaswinkel (2023) [68] | * | EXO3 [74] | YSI | * | * | * | * | * | * | * | 250 | 2 | 7.6 | 58.7 | |
| Liu (2023) [63] | * | n.s. | YSI | * | * | * | * | * | * | ||||||
| Yang (2022) [59] | * | 6920 [75] | YSI | * | * | * | * | * | * | * | 200 | 1.8 | 7.2 | 45.7 | |
| Wang (2021) [64] | * | QAM300-DE [76] | Quadlink | * | * | * | |||||||||
| Al Widyan (2021) [60] | * | UltraPen PT1 [77] | Myron L | * | * | 0.055 | 1.6 | 17.2 | |||||||
| Pedroso de Lima (2020) [78] | * | Troll 9500 [79] | In Situ | * | * | * | * | * | * | 210 | 1.9 | 8.8 | 47.3 | ||
| Pedroso de Lima (2020) [78] | * | CTD Diver [80] | Van Essen Inst. | * | * | * | 0.08 | 2.2 | 13.5 | ||||||
| Pedroso de Lima 2020 [78] | * | AP2000 [81] | Aquaread | * | * | * | * | * | 100 | 0.7 | 4.2 | 29 | |||
| Pedroso de Lima (2020) [78] | * | MiniDOT Logger [82] | PME | * | * | 300 | 0.34 | 5 | 8.6 | ||||||
| Germ (2023) [83] | AP-7000 [84] | Aquaread | * | * | * | * | * | * | * | 100 | 1.4 | 7.7 | 44 | ||
| Khrohkaew (2023) [85] | MANTA +35 [86] | Eureka | * | * | * | * | * | * | * | 100 | 2.3 | 8.9 | 48.3 | ||
| Liu (2021) [87] | EXO2 [74] | YSI | * | * | * | * | * | * | * | 100 | 3.6 | 7.6 | 70.5 | ||
| Nazirova (2021) [88] | RBR Concerto [89] | RBR | * | * | * | * | * | * | * | 750 | 6.3 | ||||
| Salas-Cueva (2021) [90] | Aqua TROLL 600 [91] | In Situ | * | * | * | * | * | * | 200 | 1.5 | 4.7 | 60.2 | |||
| Boehrer (2021) [92] | Ocean Seven 316 [93] | Idronaut | * | * | * | * | * | 100 | 2.2 | 10 | 71 | ||||
| Ref. | FPV Dim. [ha] | Water Depth [m] Max (Avg) | n° WC FPV | n° WC Fringe (dist. from FPV) | n° WC Open Water (dist. from FPV) | Depths of Measurements for Each WC [m] | Monitoring Configuration |
|---|---|---|---|---|---|---|---|
| Vlaswinke (2023) [68] | 0.04 | 22 | 1 | - | 1 (100 m) | 0.6 | Fixed: x, y, z |
| 1 | - | 1 (100 m) | each 0.5 | Fixed: x, y Mobile (winch): z | |||
| Liu (2023) [63] | 400 | >3 | 8 | 3 | 0.5, 2, 3 | Fixed: x, y, z | |
| 6 | 6 | 0.5, 2, 3 | Fixed: x, y, z | ||||
| Ilgen [2023] [61] | 0.8 | 70 (22) | 1 | 1 (<5 m) | 1 (120 m) | each 0.5 until 10 | Fixed: x, y, z (low-cost sensors) |
| Yang (2022) [60] | 1 | Shallow | 1 | 1 | 1 | 0.8 | Fixed: x, y, z |
| Wang (2021) [64] | 0.08 | 1 | 1 | 0.2 | Fixed: x, y, z | ||
| Pedroso de Lima [69] | 18.3 | 35 | 1 | 1 (100 m) | 1.5 10 20 31.5 | Fixed: x, y, z | |
| 1 | 1 (100 m) | each 1 | Mobile (ROV): x, y, z | ||||
| Pedroso de Lima [71] | 0.006–0.8 | 1 | 1 | 1 (>10 m) | 1.5 | Fixed: x, y, z |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bossi, S.; Blasi, L.; Cupertino, G.; dell’Erba, R.; Cipollini, A.; De Vito, S.; Santoro, M.; Di Francia, G.; Tina, G.M. Floating Photovoltaic Plant Monitoring: A Review of Requirements and Feasible Technologies. Sustainability 2024, 16, 8367. https://doi.org/10.3390/su16198367
Bossi S, Blasi L, Cupertino G, dell’Erba R, Cipollini A, De Vito S, Santoro M, Di Francia G, Tina GM. Floating Photovoltaic Plant Monitoring: A Review of Requirements and Feasible Technologies. Sustainability. 2024; 16(19):8367. https://doi.org/10.3390/su16198367
Chicago/Turabian StyleBossi, Silvia, Luciano Blasi, Giacomo Cupertino, Ramiro dell’Erba, Angelo Cipollini, Saverio De Vito, Marco Santoro, Girolamo Di Francia, and Giuseppe Marco Tina. 2024. "Floating Photovoltaic Plant Monitoring: A Review of Requirements and Feasible Technologies" Sustainability 16, no. 19: 8367. https://doi.org/10.3390/su16198367