1. Introduction
The oil palm (
Elaeis guineensis) is an important industrial cash crop for major producer countries such as Indonesia, Malaysia, and Thailand, which provide sizeable economic benefits both from employment and income through exports [
1]. Malaysia is the second-largest producer of oil palm and employs more than 600,000 high- and low -skilled laborers. In the next few years, over 66,000 new jobs are expected to be created through continued research and innovation [
2]. According to the Department of Statistics in Malaysia, oil palm is a significant contributor to the gross domestic product (GDP) of the agriculture sector by 46% in 2017 [
3]. Oil palm is the most significant source of vegetable oil because of its high yield and extended productivity with a lifespan up to 25 years [
4]. Currently, 4.49 million hectares of land in Malaysia is planted with oil palm, which produced 17.73 million tons of oil palm [
5]. More land areas for expansion of oil palm plantations are controversial and not sustainable; hence, there is a need to optimize and maximize oil palm yield and production [
6]. Moreover, the yield of oil palm plantation depends mostly on plant health. In addition, the corresponding market price depends heavily on the quality of oil palm [
1]. However, oil palm growth is susceptible to the effects of climate change through a range of expected biotic (e.g., pests, diseases, pollinators, associated crops) and abiotic (e.g., temperature, rainfall, soil moisture, soil pH) stresses [
7].
Information on oil palm plantation health conditions provides valuable inputs for the oil palm companies for planning, decisions, and management strategies. Information technology plays a vital role in increasing the cost-effectiveness of agriculture practices in precision agriculture. Precision agriculture implements management activities, both spatially and temporally. These include pre-planting, planting, fertilizing, crop protection, harvesting, and irrigation [
8]. Remote sensing is one of the main tools that supports precision agriculture as the spatial data provider with its spectral capability to detect some variables, including soil properties, plant health, and crop yields [
9]. In the case of oil palm plantations, plant health detection at an early stage is crucial to curb future losses from underperforming trees. There could be several reasons for low yields, such as diseases, pest attacks, weak quality seedlings, fertilizers, climatic, and edaphic factors that require further investigations. Previous studies reported that early monitoring of oil palm health not only promotes appropriate and effective remedial measures but also extends oil palm lifespan and increases productivity [
10]. The health of oil palm can be monitored by studying the biophysical parameters such as height, crown size, and vegetation vigor. Spectral reflectance-based vegetation indices are effective in monitoring vegetation vigor and phenological parameters [
11]. Several biophysical parameters such as leaf area index (LAI), crown diameter, crown projection area (CPA), vigor, and tree height are positively correlated with the plant growth stage [
12]. Real-time quantification of these parameters can be useful for detecting the health of a tree, which allows the selection of appropriate remedial measures such as the use of fertilizer, insecticides, and irrigation to improve tree health. Meng et al. studied real-time detection of ground objects using unmanned aerial vehicle (UAV) and deep learning methods in China [
13].
The recent development in UAV techniques made it possible to apply low altitude photogrammetric techniques in precision agriculture due to their flexibility and low cost [
14]. In the oil palm industry, UAV-based imaging provides low cost flexible data acquisition with less weather constraints and higher spatial/temporal resolution, as compared to high-resolution satellite data [
15]. There are various applications of UAV, such as monitoring canopy structure and condition, mapping biomass, and precision agriculture [
16,
17]. There are ground-based sensors available for precision agriculture applications, but UAV-based monitoring is advantageous in generating smaller ground sample distances, instantaneous calibration to reflectance, and point cloud construction [
18]. The structure from motion (SfM) technique is useful to characterize individual trees [
17]. Díaz-Varela et al. and Zarco-Tejada et al. used the SfM technique to estimate olive tree height and crown diameter in Spain [
19,
20]. Previous studies showed that UAV-based SfM derived canopy cover of oil palm showed 20-50% overestimation as compared to ground-based measurement [
21]. Usually, before conducting aerial surveys, several parameters need to be optimized. These include flight altitude, image overlap, speed, resolution, and area of coverage [
22]. Logically, higher flight altitude captures a smaller number of images with lower ground sample distance (GSD) because of the broad field of view of the camera sensors onboard the UAV. High flight altitude can influence the accuracy of information derived for an object due to the decline of the image detail [
23]. Hence, lower altitude UAV flight (15–30 m) can provide more accurate and detailed image information [
22]. However, it has been reported that there is no significant difference in the normalized difference vegetation index (NDVI) value between two objects (weed and crop) in images taken from 60 m, 80 m, and 100 m above ground level [
24]. Moreover, the reconstruction of 3D point clouds is sensitive to the movement of twigs and leaves induced by wind [
22]. As the UAV flies lower, the camera captures more images so that the possibility of the object movement becomes greater. In addition, more images require more storage capacity and more computing power for processing.
Oil palm plantations generally cover a large area. However, UAV data collected at low flight altitudes can only cover a small area in a given time. There is a trade-off between flight altitude and area covered during the flight [
22]. Some aerial surveys conducted over oil palm considered using 80 m, 100 m, and 150 m flight height [
1,
23,
25]. See et al. found that 80 m altitude aerial images produced a fair amount of accuracy in individual tree identification and tree crown delineation in matured oil palm plantations [
1]. A previous study on the comparison between fixed-wing and multi-rotor UAVs suggests that flying altitude below 150 m is suitable for environmental mapping for better representation of vegetation features. Multi-rotor UAV systems are more accurate and better suited for small areas than fixed-wing drones [
22]. The flight altitude can directly influence the details and quality of the derived biophysical vegetation parameters. There is a lack of studies about the influence of low flight altitude on the extraction of biophysical parameters of young oil palm. Only a few studies noticed the impact of flight altitude on data acquisition and processing time [
26]. Furthermore, Torres-Sanchez et al. investigated the influence of UAV collected image overlap on computation and DSM accuracy in olive orchards in Calancha, Spain [
27]. Therefore, it is necessary to understand the influence of flight altitude on derived biophysical parameters of young oil palm for precision agriculture studies. This study attempts to compare the influence of different flight altitudes to derive biophysical parameters of young oil palm using the SfM technique.
2. Study Area
The study site lies between latitude 5°8′8.368″N to 5°8′4.852″N and longitude 118°24′26.299″E to 118°24′35.717″E in the Lahad Datu district of the Eastern coast of Sabah, Malaysia. The area of interest (AOI) covers 5.2 acres of young oil palm planted trees (
Figure 1). In total, 241 young oil palm trees with the age of 3 to 4 years were present in the study area. All the oil palm trees were planted with a fixed tree spacing of approximately 8 × 8 m. The climate of the study area is tropical, with an average annual temperature of 26.9 °C and an average rainfall of 2063 mm [
28].
Figure 1 shows the location of the study area and individual oil palm trees in the inset aerial images of the AOI.
Besides oil palm trees, the ground area is covered with
Mucuna Bracteata, a type of land cover crop purposely planted to protect the soil from weeds.
Mucuna Bracteata in oil palm plantations also helps to maintain soil moisture content, supply organic matter, and protect from soil erosion [
29]. Some of the trees were affected by Rhinoceros beetle (
Oryctes rhinoceros L.) and other pests in the study area. Hence, some of the trees were showing damaged fronts and dying leaves. Rhinoceros beetles (RB) destroy the young oil palm trees by burrowing into the shoots and young fronts.
Figure 2a,b show a healthy and diseased oil palm tree, respectively.
Figure 2c shows a variety of damages caused by RB and other pests. Overall, the affected oil palm trees show biological and physical damages such as dying leaves, stunted growth, and irregular crowns. Therefore, the detection of these diseased trees is essential to follow up treatment and control over the spreading to other healthy oil palm trees.
5. Discussion
This study demonstrates a systematic analysis of the influence of different UAV altitudes to extract biophysical parameters of the young oil palm plantation area in Malaysia. It provides a methodological approach to extract various biophysical parameters from UAV data. These parameters can be useful indicators to monitor plant growth and health. The objective of this study was to evaluate the suitable flying height to extract crown diameter and height using UAV-based aerial images. Obtaining the tree heights and crown diameter from satellite-based surface models have limitations due to their low spatial resolution. Further, obtaining tree height values with a GNSS device is difficult in denser forest areas [
19,
43]. Terrestrial light detection and ranging (LiDARs) and UAV-LiDARs, on the other hand, produce accurate results, but long processing time and heavier payload limit the gathering of base data [
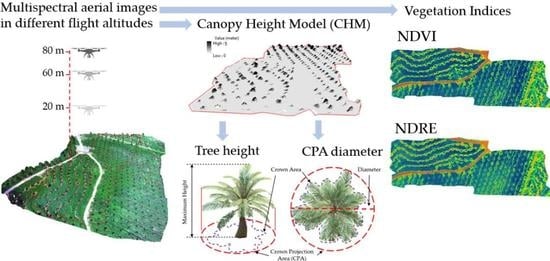
44]. Therefore, a low-weight DJI Phantom–4 UAV device mounted with the MicaSense RedEdge Multispectral sensor were used for obtaining the tree height and crown diameter at 20 m, 60 m, and 80 m flight altitudes. Since the RedEdge camera has the capability to obtain information in the NIR and RedEdge spectrum, we also calculated NDVI and NDRE in this study.
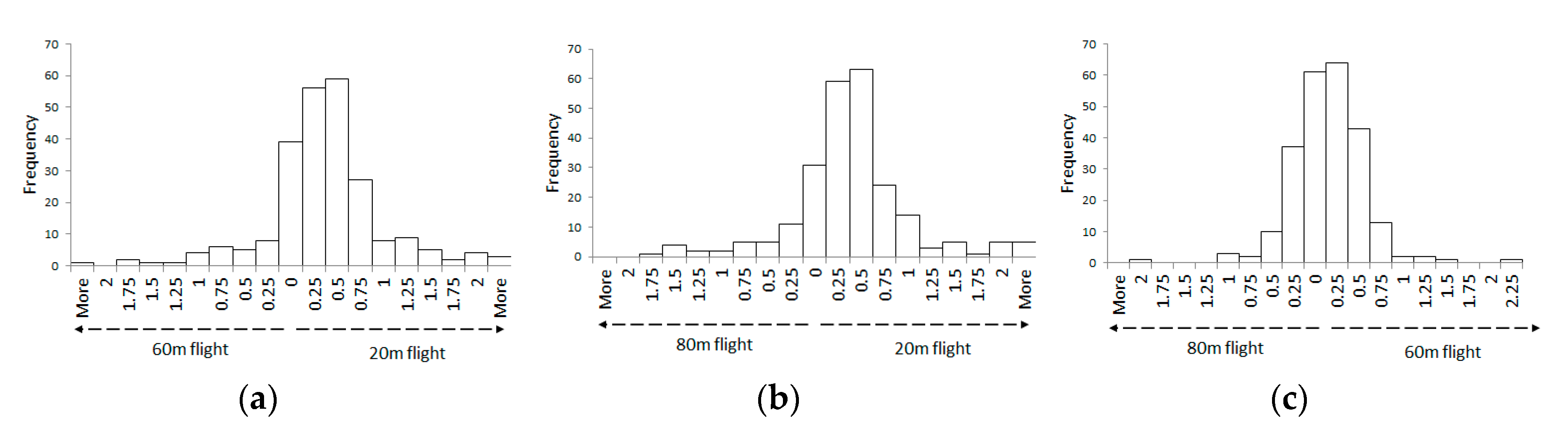
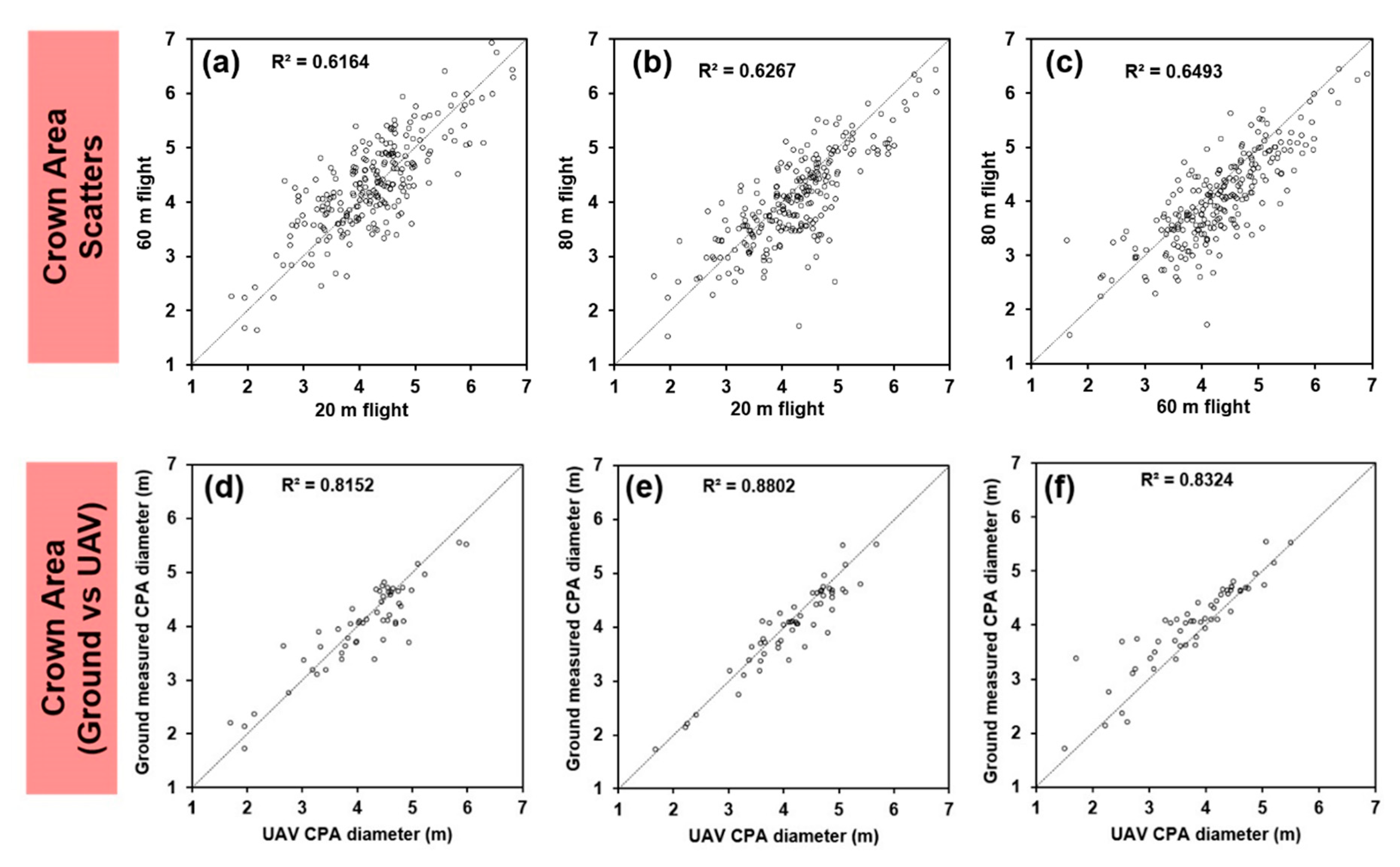
The important finding of this was that flight altitude at 60 m can provide more accurate results as compared to 20 m and 80 m. The highest accuracy to extract CPA diameter and height was produced at 60 m altitudes. UAV data at low altitude (20 m) with an increased number of point clouds can provide better height estimation, but it was not true in this study. The findings of this study is in contrast to Whitehead et al. [
23] and Seifert et al. [
22]. Whitehead et al. reported that the probability of detection of objects is better with higher point clouds data [
23]. However, a higher spatial resolution is not necessary to obtain the desired accuracy, as noticed in this study. Seifert et al. [
22] reported that low flight altitude could produce more details in forest areas. The reason might be that the authors also used high forward overlaps, which is not explored in this study. Even though 20 m flight altitude produced more point clouds than 60 m and 80 m, the systematic error propagation may also be higher while employing denser point clouds. However, this condition is not correct to extract CPA diameter. In this study, flights at all altitudes produced high accuracy for CPA measurements. This is mainly because the extraction of CPA diameter is not as sensitive as tree height, which relies on the maximum height value of the point clouds. According to
Section 4.2, many errors (overestimations) are produced at 20 m flight altitudes, which makes the accuracy lower than tree height estimated at 60 m and 80 m flight altitudes.
To produce accurate point clouds, capturing UAV aerial images closer to objects is not always necessary. At a low flight altitude, the UAV captures many images because of the smaller field of view of the sensor. However, even though producing more point clouds, the images-alignment from many images at lower altitudes can result in an additional error. Tree structures (twigs and leaf) may change due to wind-induced movement. This shifts the relative position of objects between images, which causes mismatching in image alignment [
22]. Therefore, more images captured may lead to more errors in image alignment. An additional consideration when capturing aerial images is the height of objects in the area of interest. For example, the maximum oil palm height in our study area was around 5 m and therefore only 15 m difference from the sensor. Moreover, the topography was not flat, which meant some trees would be captured less than 15 m from the UAV. These conditions also make the less consistent for biophysical parameters extraction was observed at 20 m height.
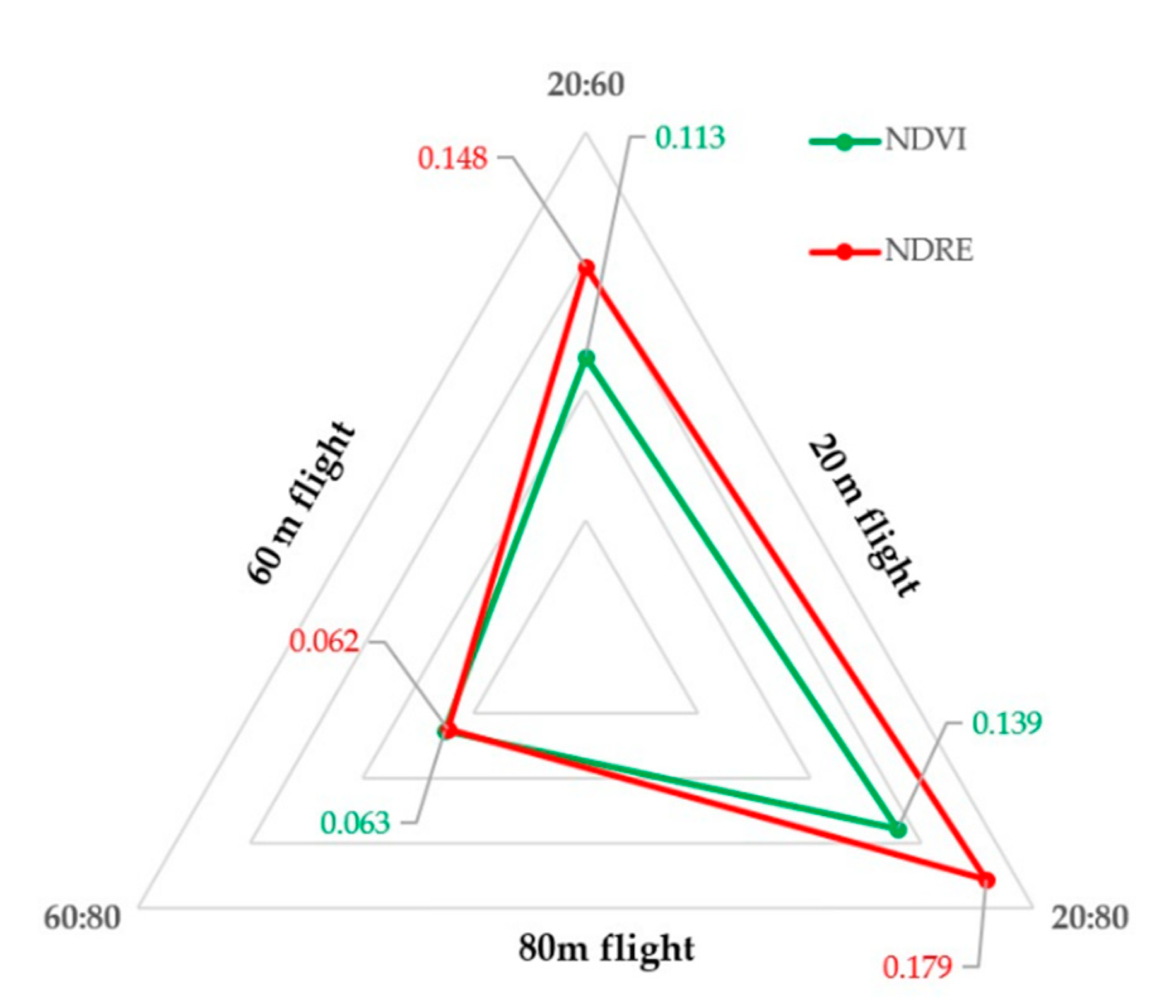
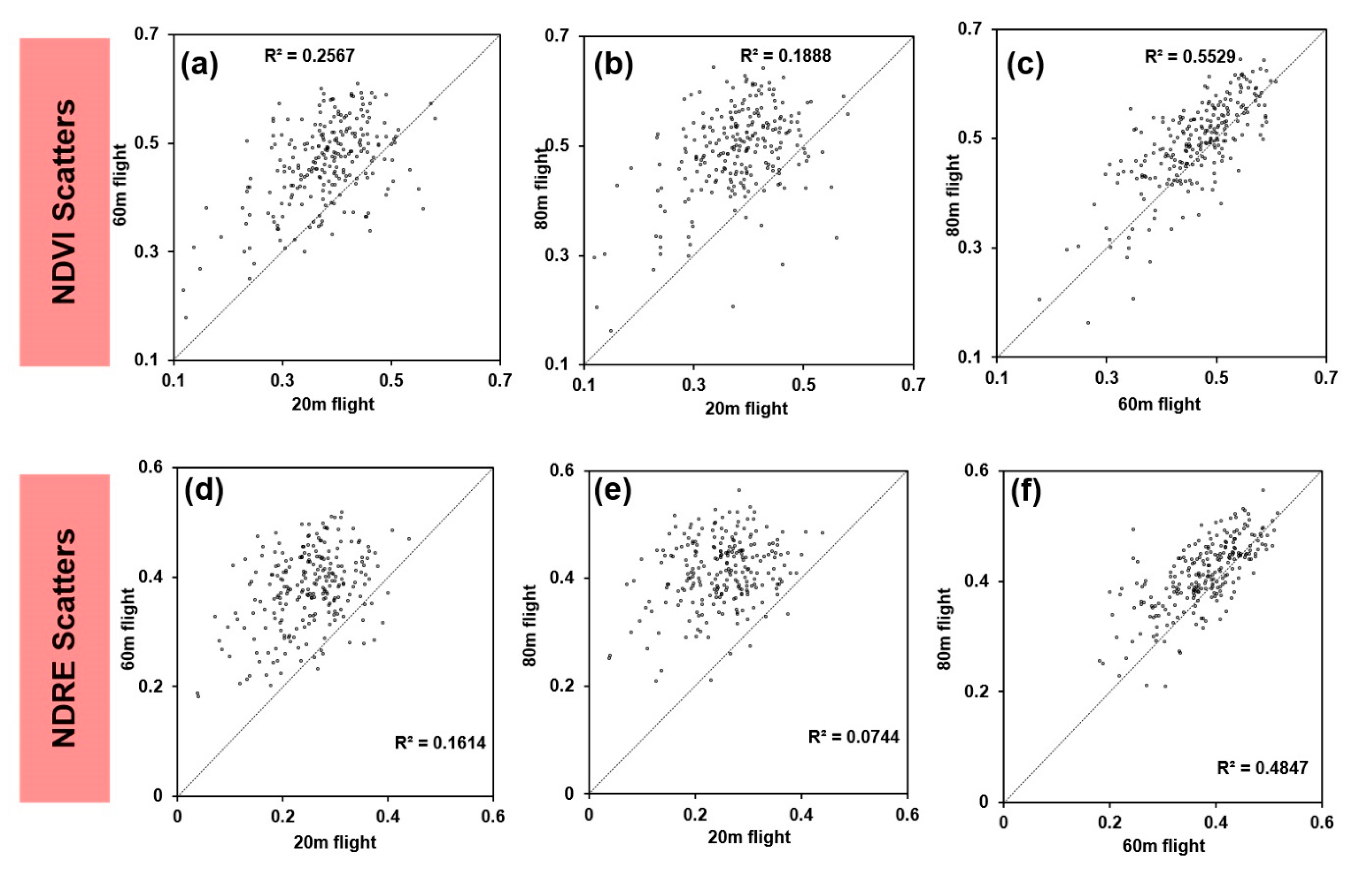
Based on our results, we determined that the NDVI and NDRE are best extracted from 60 m followed by 80 m flight altitudes. Mesas-Carrascosa et al. reported that the NDVI value is not significantly affected by the different flight altitudes [
24]. Contrary to their observation, we found that the low flight altitude (20 m) produced larger RMSD values than 60 m and 80 m flight. This is probably because, at the highest pixel size (1.37 cm), more noise may also be captured when compared to the coarser pixel sizes. The higher altitude can maintain the spectral accuracy as it is observed that NDVI and NDRE values of 60 m and 80 m flight are well correlated. During field measurement, the UAV speed for all altitudes were at 5 m/s. Therefore, the closer sensor to the objects, the faster its relative speed to the object even the drone speed remains the same. As a result, some images were not clear and had to be eliminated. To overcome the limitations of the distance between objects and sensors, the use of a GNSS onboard system like Phantom4 RTK is useful. It can provide real-time, centimeter-level positioning data for improved absolute accuracy on image metadata. The use of real-time detection of young oil palm biophysical parameters using UAV is advantageous because at the young stage, there is a rapid growth of biophysical parameters and it can be helpful to monitor the health of oil palm in case of pest infestation [
13].
This study examined different flight altitudes, but all flights were lower than 100 m above the ground. To cover a larger area, flights at higher altitudes are needed for higher efficiency, and, in this case, 60 m altitude and 80 m altitude flights will be more efficient than flights at 20 m altitudes. It is challenging to provide an optimum value of UAV and sensors parameters since each combination of sensors and drone parameters produce different results. Nonetheless, we attempted to consider only a few parameters in this study. Thus, we need to optimize these combinations based on our requirement by considering various trade-offs such as: altitudes, sensors resolution, point clouds, processing time, side and forward overlaps, etc. A further investigation of the effects of sensors and overlaps would be desirable to better understand their impact.
This study is focused on young oil palm plantation areas with limited coverage, while the old oil palm plantation area was not considered. Fawcett et al. reported that 100 m UAV altitude is the best for estimating the height of seven-year old oil palm trees [
25]. Therefore, we can suggest that flight altitude should be increased in tall trees to minimize the high relative speed, as mentioned earlier. Moreover, the crowns of young oil palm plantations are still in the growing stage, which makes the gaps between individual trees are apparent in this study. Therefore, the estimation of crown size at the young stage is more accurate as compared to the old stage because at the old stage, there is a possibility of overlaps between the crowns of old trees. This challenge can be further explored to determine optimal flight altitudes for different growth stages of oil palm in the future.

 ,
, 




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}