
Adaptive Robust Radar Target Detector Based on Gradient Test



Abstract
:
1. Introduction
2. Problem Formulation
3. Design of Adaptive Robust Detector
3.1. Adaptive Robust Gradient Detector
3.2. CFAR Property Proof of the Gradient Detector
4. Performance Assessment
4.1. CFAR Property Analysis
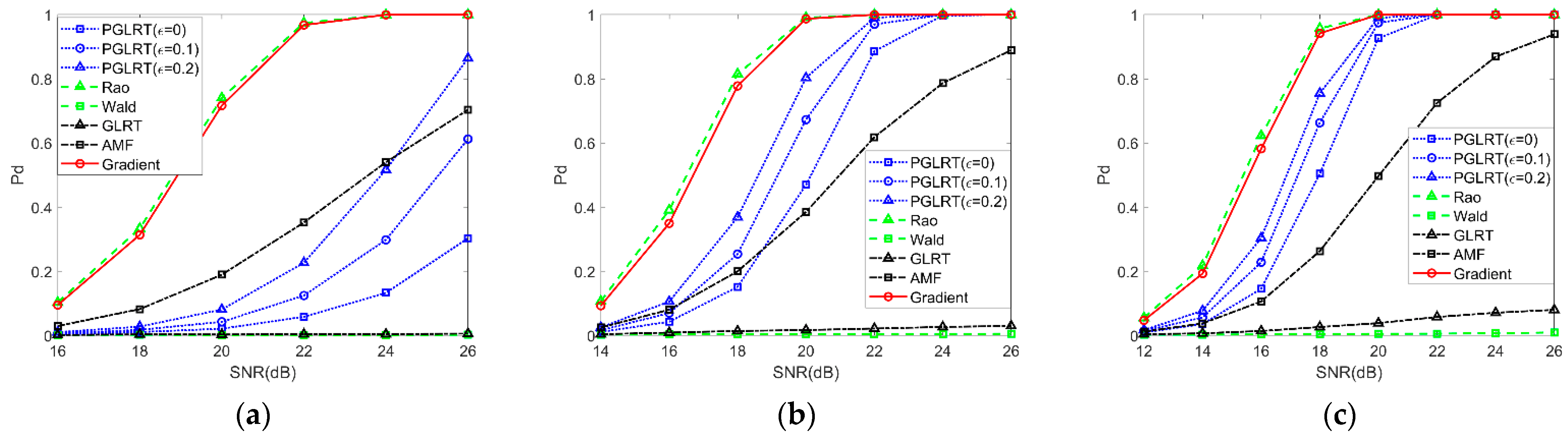
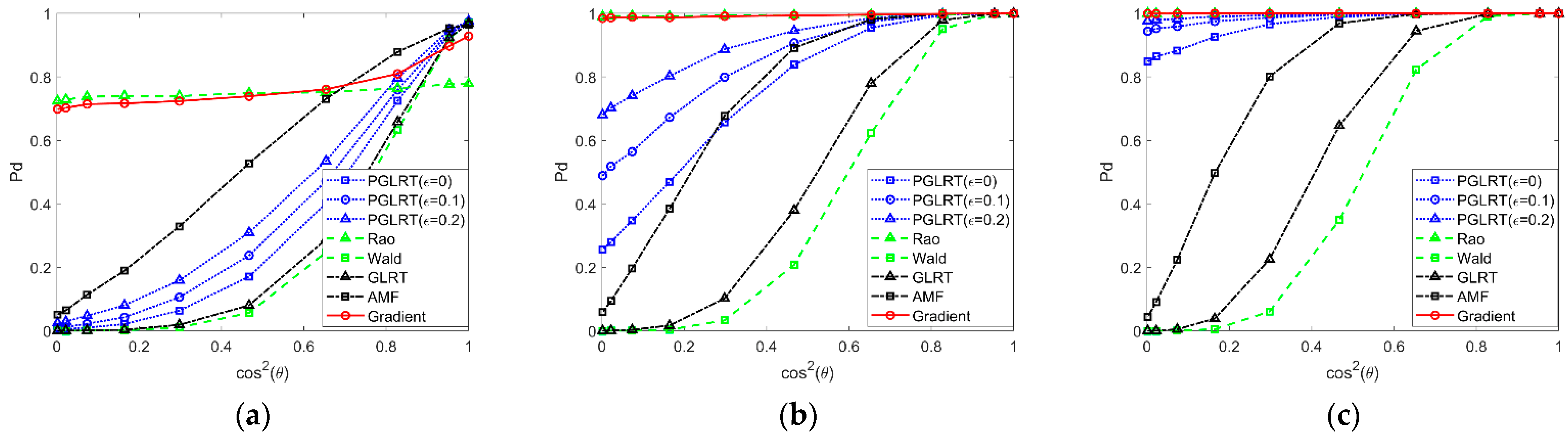
4.2. Mismatched Detection Performance Analysis
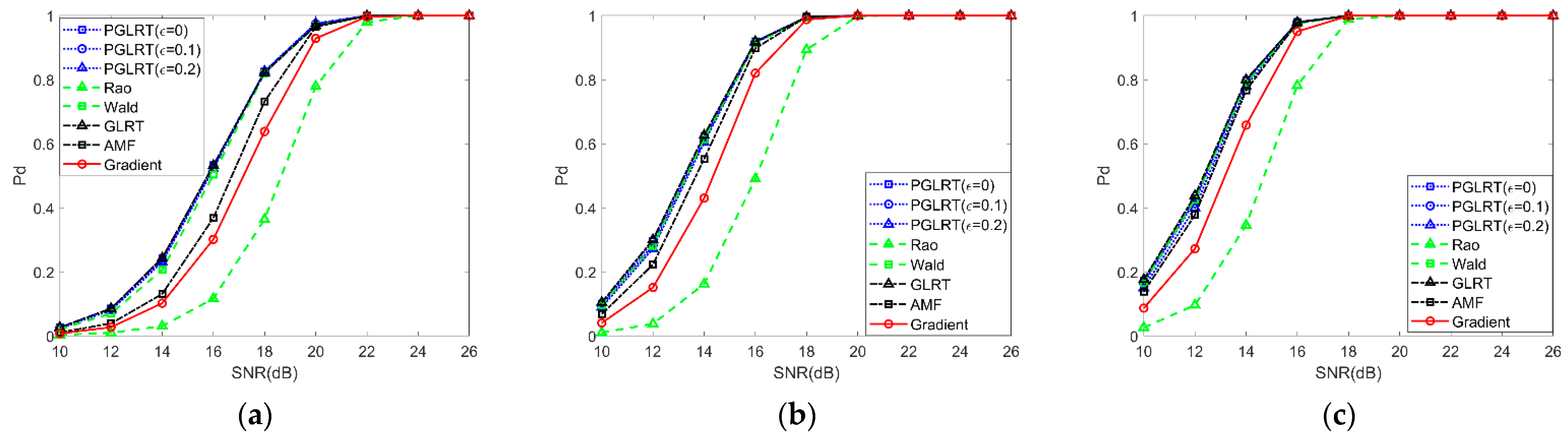
4.3. Matched Detection Performance Analysis
4.4. Computation Complexity Analysis
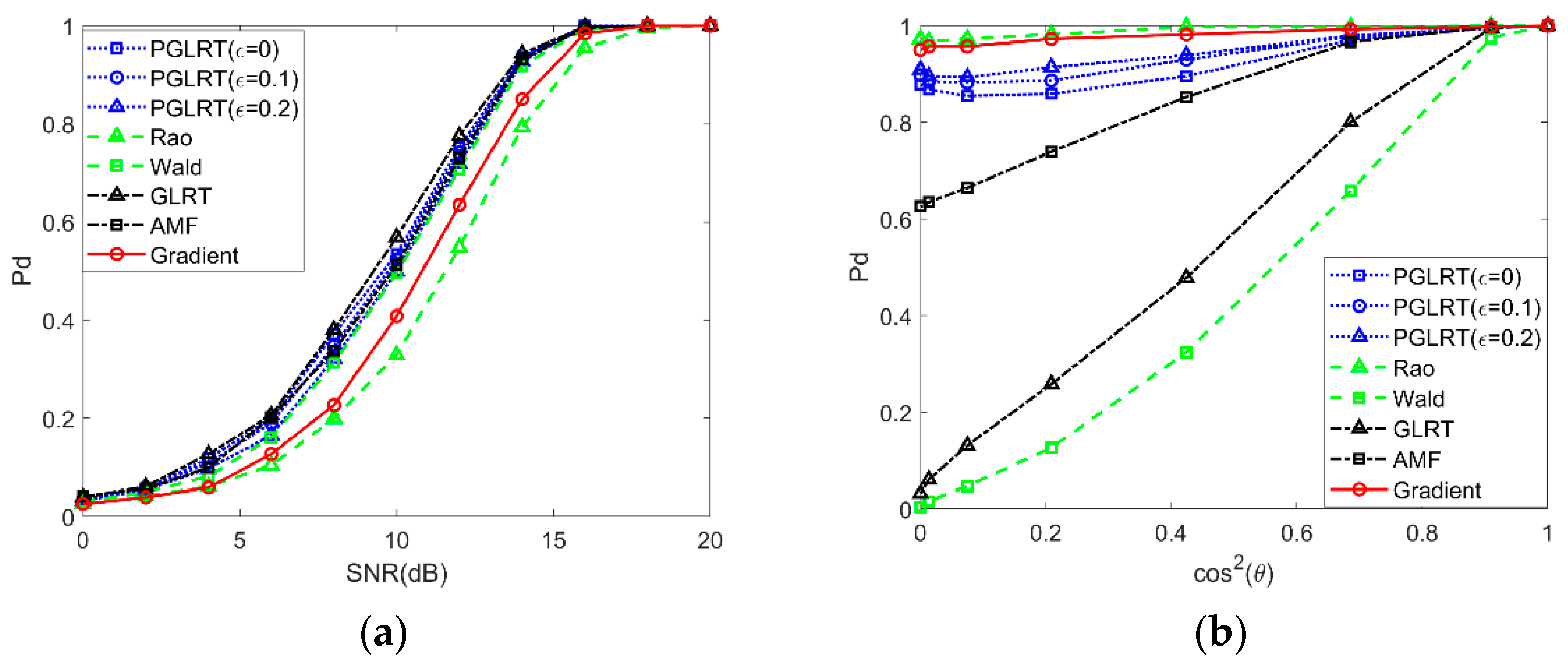
4.5. Experimental Results of IPIX Real Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kelly, E.J. An adaptive detection algorithm. IEEE Trans. Aerosp. Electron. Syst. 1986, AES-22, 115–127. [Google Scholar] [CrossRef] [Green Version]
- Robey, F.C.; Fuhrmann, D.R.; Kelly, E.J.; Nitzberg, R. A CFAR adaptive matched filter detector. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 208–216. [Google Scholar] [CrossRef] [Green Version]
- De Maio, A. A new derivation of the adaptive matched filter. IEEE Signal Process. Lett. 2004, 11, 792–793. [Google Scholar] [CrossRef]
- Kraut, S.; Scharf, L.L.; McWhorter, L.T. Adaptive subspace detectors. IEEE Trans. Signal Process. 2001, 49, 1–16. [Google Scholar] [CrossRef] [Green Version]
- De Maio, A. Rao test for adaptive detection in Gaussian interference with unknown covariance matrix. IEEE Trans. Signal Process. 2007, 55, 3577–3584. [Google Scholar] [CrossRef]
- Liu, X.; Du, L.; Xu, S. GLRT-Based coherent detection in sub-Gaussian symmetric alpha-stable clutter. IEEE Geosci. Remote Sens. Lett. 2022, 19, 8015405. [Google Scholar] [CrossRef]
- Song, C.; Wang, B.; Xiang, M.; Wang, Z.; Xu, W.; Sun, X. A novel post-doppler parametric adaptive matched filter for airborne multichannel Radar. Remote Sens. 2020, 12, 4017. [Google Scholar] [CrossRef]
- Chen, X.; Cheng, Y.; Wu, H.; Wang, H. Heterogeneous clutter suppression for airborne radar STAP based on matrix manifolds. Remote Sens. 2021, 13, 3195. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, J.; Li, Y.; Chen, H.; Peng, M. Adaptive Subspace Signal Detection in Structured Interference Plus Compound Gaussian Sea Clutter. Remote Sens. 2022, 14, 2274. [Google Scholar] [CrossRef]
- Xue, J.; Xu, S.; Liu, J.; Pan, M.; Fang, J. Bayesian detection for radar targets in compound-Gaussian Sea clutter. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4020805. [Google Scholar] [CrossRef]
- Wang, Z.; Li, G.; Chen, H. Adaptive persymmetric subspace detectors in the partially homogeneous environment. IEEE Trans. Signal Process. 2020, 68, 5178–5187. [Google Scholar] [CrossRef]
- De Maio, A.; Farina, A.; Gerlach, K. Adaptive detection of range spread targets with orthogonal rejection. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 738–752. [Google Scholar] [CrossRef]
- Pulsone, N.B.; Rader, C.M. Adaptive beamformer orthogonal rejection test. IEEE Trans. Signal Process. 2001, 49, 521–529. [Google Scholar] [CrossRef]
- Bandiera, F.; Besson, O.; Ricci, G. An ABORT-like detector with improved mismatched signals rejection capabilities. IEEE Trans. Signal Process. 2008, 56, 14–25. [Google Scholar] [CrossRef] [Green Version]
- Besson, O. Detection in the presence of surprise or undernulled interference. IEEE Signal Process. Lett. 2007, 14, 352–354. [Google Scholar] [CrossRef] [Green Version]
- Orlando, D.; Ricci, G. A Rao test with enhanced selectivity properties in homogeneous scenarios. IEEE Trans. Signal Process. 2010, 58, 5385–5390. [Google Scholar] [CrossRef]
- De Maio, A. Robust adaptive radar detection in the presence of steering vector mismatches. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1322–1337. [Google Scholar] [CrossRef]
- Liu, J.; Li, J. Robust detection in MIMO radar with steering vector mismatches. IEEE Trans. Signal Process. 2019, 67, 5270–5280. [Google Scholar] [CrossRef]
- Besson, O. Adaptive detection with bounded steering vectors mismatch angle. IEEE Trans. Signal Process. 2007, 55, 1560–1564. [Google Scholar] [CrossRef] [Green Version]
- Shen, L.; Liu, Z.; Xu, Y.; Bai, Y.; Zhao, T. Robust polarimetric adaptive detector against target steering matrix mismatch. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 442–455. [Google Scholar] [CrossRef]
- Coluccia, A.; Ricci, G.; Besson, O. Design of robust radar detectors through random perturbation of the target signature. IEEE Trans. Signal Process. 2019, 67, 5118–5129. [Google Scholar] [CrossRef] [Green Version]
- Kay, S.; Zhu, Z. The complex parameter Rao test. IEEE Trans. Signal Process. 2016, 64, 6580–6588. [Google Scholar] [CrossRef]
- Sun, M.; Liu, W.; Liu, J.; Hao, C. Complex parameter Rao, Wald, gradient, and Durbin tests for multichannel signal detection. IEEE Trans. Signal Process. 2022, 70, 117–131. [Google Scholar] [CrossRef]
- Sun, S.; Liu, J.; Liu, W.; Jian, T. Robust detection of distributed targets based on Rao test and Wald test. Signal Process. 2021, 180, 107801. [Google Scholar] [CrossRef]
- Kelly, E.J.; Forsythe, K. Adaptive Detection and Parameter Estimation for Multidimensional Signal Models; Technical Report 848; Lincoln Laboratory: Lexington, KY, USA, 1989. [Google Scholar]
- The McMaster IPIX Radar Sea Clutter Database. Available online: http://soma.ece.mcmaster.ca/ipix/ (accessed on 1 June 2019).
- Tang, P.; Wang, Y.-L.; Liu, W.; Du, Q.; Wu, C.; Chen, W. A tunable detector for distributed target detection in the situation of signal mismatch. IEEE Signal Process. Lett. 2020, 27, 151–155. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Operation Time(s) |
|---|---|
| ) | 75.3228 |
| Rao | 72.6946 |
| Wald | 77.5186 |
| GLRT | 70.0076 |
| AMF | 68.3321 |
| Gradient | 76.2530 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Liu, J.; Chen, H.; Yang, W. Adaptive Robust Radar Target Detector Based on Gradient Test. Remote Sens. 2022, 14, 5236. https://doi.org/10.3390/rs14205236
Wang Z, Liu J, Chen H, Yang W. Adaptive Robust Radar Target Detector Based on Gradient Test. Remote Sensing. 2022; 14(20):5236. https://doi.org/10.3390/rs14205236
Chicago/Turabian StyleWang, Zeyu, Jun Liu, Hongmeng Chen, and Wei Yang. 2022. "Adaptive Robust Radar Target Detector Based on Gradient Test" Remote Sensing 14, no. 20: 5236. https://doi.org/10.3390/rs14205236
APA StyleWang, Z., Liu, J., Chen, H., & Yang, W. (2022). Adaptive Robust Radar Target Detector Based on Gradient Test. Remote Sensing, 14(20), 5236. https://doi.org/10.3390/rs14205236