1. Introduction
Polarimetric Synthetic Aperture Radar Interferometry (Pol-InSAR) is known as a technical fusion of Polarimetric Synthetic Aperture Radar (Pol-SAR) and Interferometric Synthetic Aperture Radar (In-SAR) [
1]. In a Pol-InSAR system, two Pol-SAR sensors work at slightly different positions in space to acquire fully polarimetric data sets. This technique has been widely used for forest parameter inversion by virtue of its sensibility to both vertical structures and physical characteristics of the scattering media without the influence from time and weather. By extracting the phase and amplitude information from the observed complex correlations, Pol-InSAR can effectively separate the vertical locations of different phase centers with different polarization scattering mechanisms [
2,
3]. So far, there are various inversion algorithms for Pol-InSAR data, but in terms of model-based retrieval methods, the estimation accuracy is closely related to the coherent scattering model [
4].
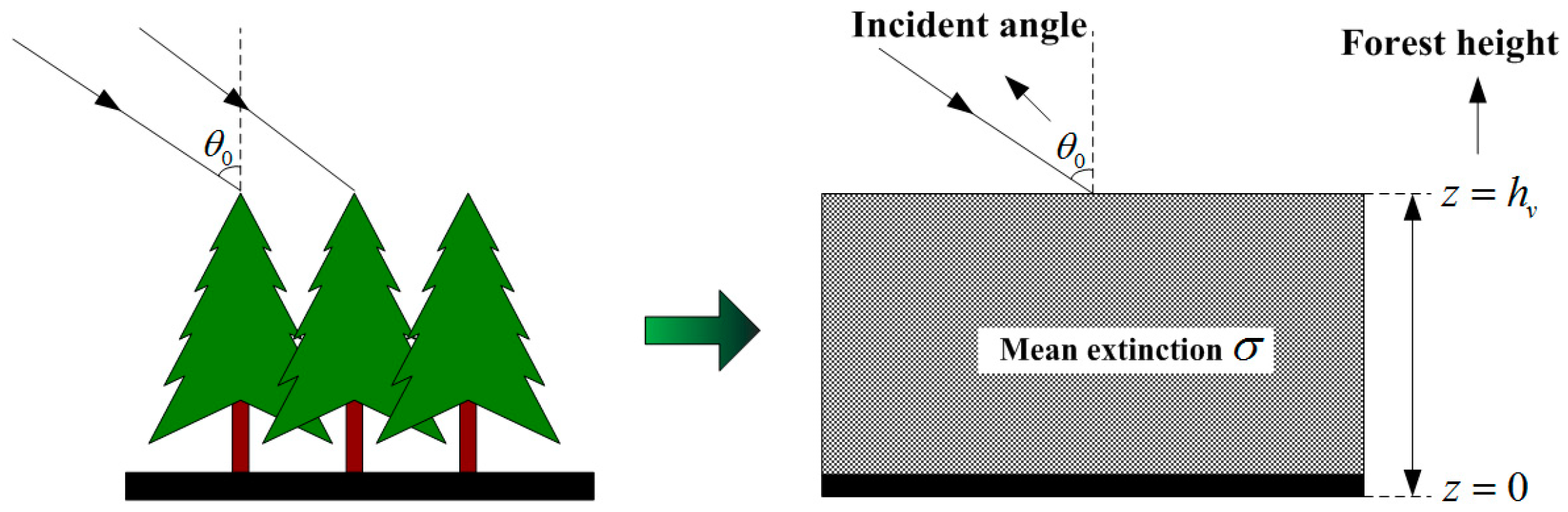
RVoG model is a two-layer scattering construction which considers forest target as a combination of flat ground and volumetric canopy [
5,
6]. In RVoG model, the underlying topography is regarded as a flat plane so that its complex correlation can be approximated as a function of ground phase, ground-to-volume scattering ratio and volume correlation, where the volume correlation can be fully defined by forest height, mean extinction and other system parameters [
7,
8,
9].
As for model-based inversion methods for Pol-InSAR data, three-stage process is widely applied owing to its low complexity and high efficiency. The union of three-stage algorithm and RVoG model is a typical scheme for forest parameter extraction [
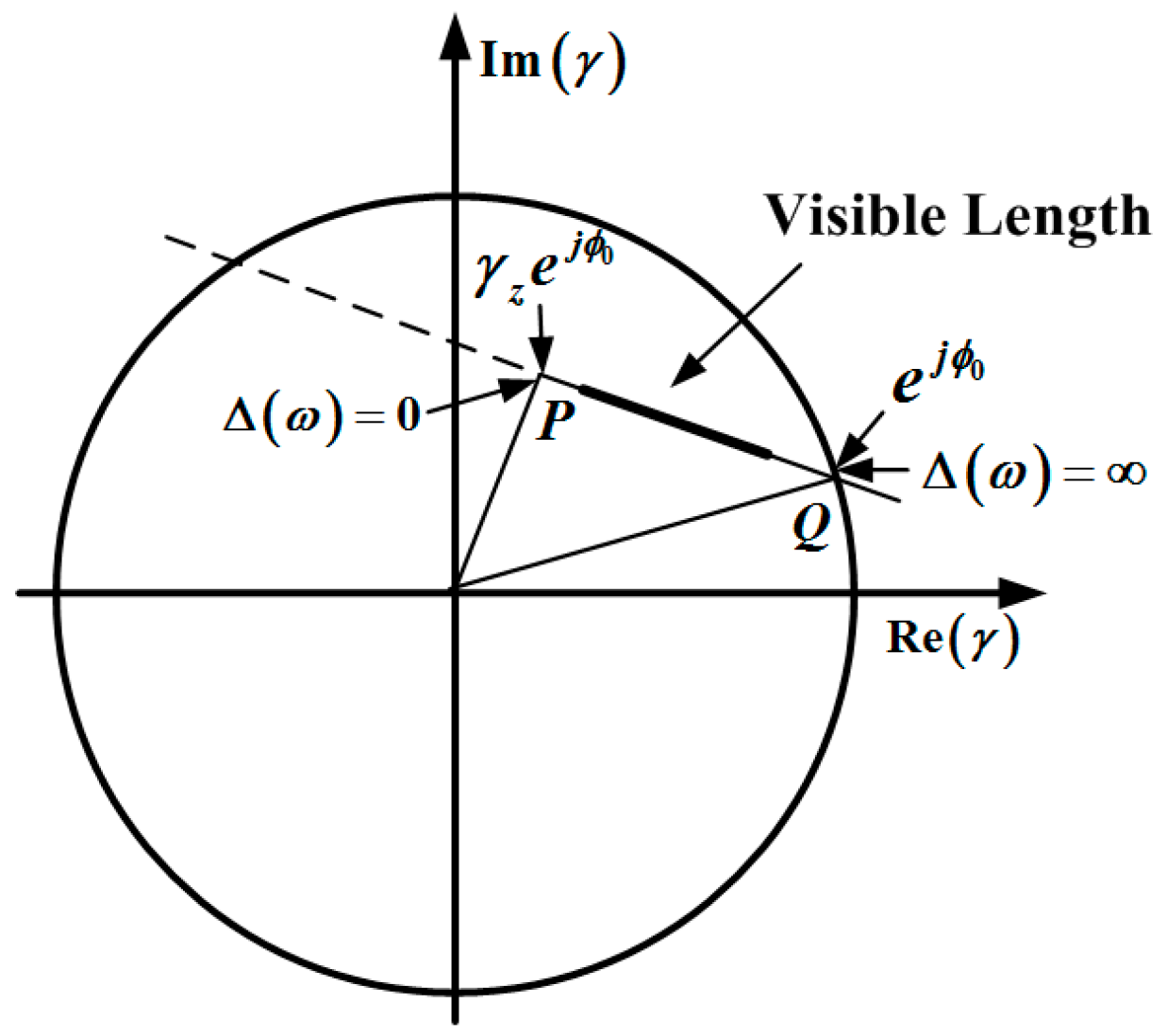
10]. The complex correlation of RVoG model can be visualized as a straight line in the complex plane which is the prior foundation of three-stage process [
11]. Through the least square fitting of the observed complex correlations under different polarimetric channels, the ground phase and volume correlation can be extracted from the geometric relationship between the coherent line and unit circle [
12]. After that, allowing for the nonlinear property of the volume coherent function, two dimensional (2D) search is carried out to accomplish the estimation of forest height and mean extinction [
13].
Three-stage process based on RVoG model has been extensively applied for forest parameter extraction from Pol-InSAR data. However, the inversion accuracy of this scheme is rigorously limited by underlying terrain [
14]. In real scenario, the ground topography intricately fluctuates with the coexistence of azimuth and range slopes, which leads to an extremely complex scattering contribution from the ground and volume components. Under this situation, the flat-ground approximation in RVoG model is likely to cause incorrect separation of the volume and ground correlations and thus influences the estimation accuracy of related parameters. Therefore, the adjustment of RVoG model need to be promoted from this aspect.
In order to restrain the deterioration of inversion precision derived from azimuth slope, literatures [
15,
16,
17] put forward a series of estimation and compensation algorithms based on the polarization orientation angle of Pol-InSAR data. However, for the disturbance from range terrain distortion, effective solutions are rare. Reference [
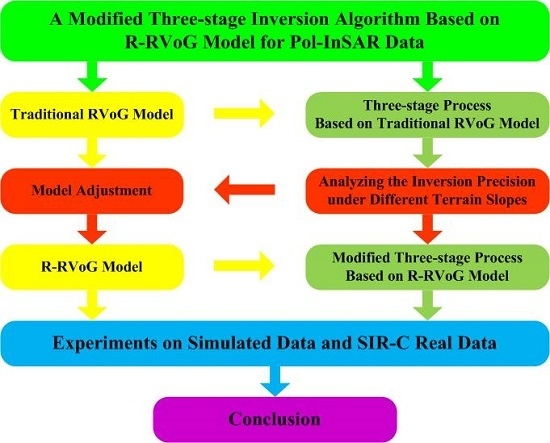
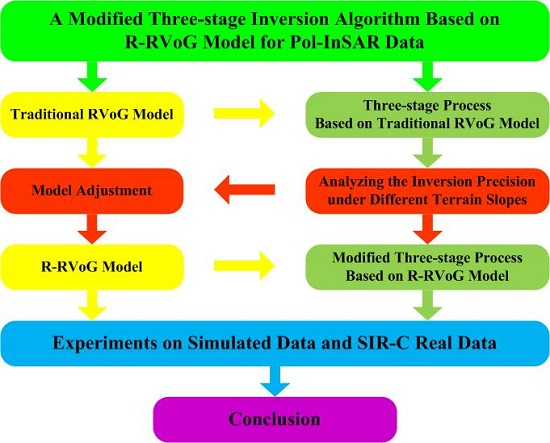
18] proposes an improved algorithm from this aspect, but its inversion accuracy strictly depends on the precision of external input. Motivated by this purpose, this paper proposes an R-RVoG model to replace traditional RVoG model. By modifying the underlying topography as a range-sloped plane, the complex correlation of R-RVoG model can be amended as a function of ground phase, ground-to-volume scattering ratio, forest height, mean extinction and range slope. The introduction of range slope factor makes this modified model better resemble to real scene and thus improves the performance of three-stage algorithm. Both of the simulated data with different terrain slopes and the Space-borne Imaging Radar-C (SIR-C) real data in Tianshan test area are processed to verify the validity of this modification.
This paper is organized as follows: Through the processing of simulated data with different range slopes,
Section 2 analyzes the influence of range slope factor on the performance of traditional RVoG inversion. In order to suppress this impact,
Section 3 develops an R-RVoG scattering model and deduces its complex correlation from the original echo signal of Pol-InSAR. By processing both of the simulated data and SIR-C real data with the modified three-stage operation based on R-RVoG model,
Section 4 and
Section 5 respectively provide corresponding analysis of the inversed results and thus manifest the outperformance of this modification. Conclusions are drawn in
Section 6.
3. R-RVoG Model
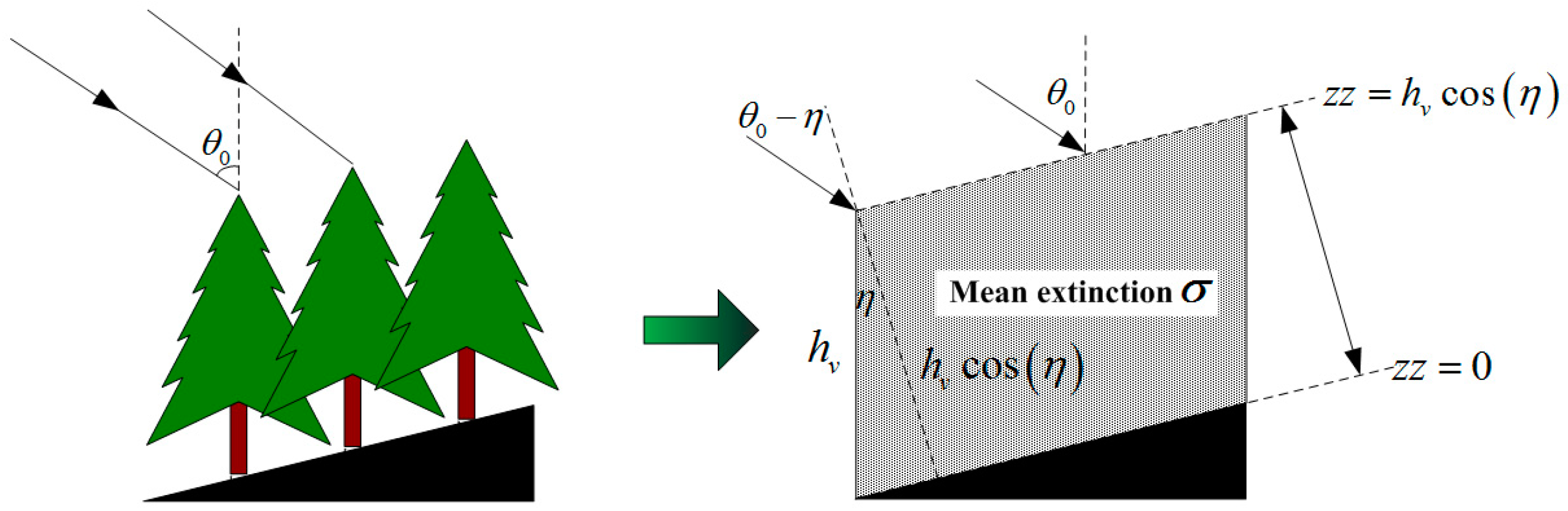
In this section, an R-RVoG model is proposed to compensate the precision deterioration of three-stage process which is mainly caused by the existence of range slope. After relevant adjustments, the constitution of the modified two-layer scattering model is presented in
Figure 8.
The R-RVoG model can be regarded as a modified version of traditional RVoG model where the ground layer is amended as an inclined plane in range direction. The gradient of this plane can be either positive or negative which respectively stands for the phenomenon of front and back slope. Accordingly, the complex correlation of this model needs to be re-deduced from the original echo signal due to the intrinsic change of physical characteristics.
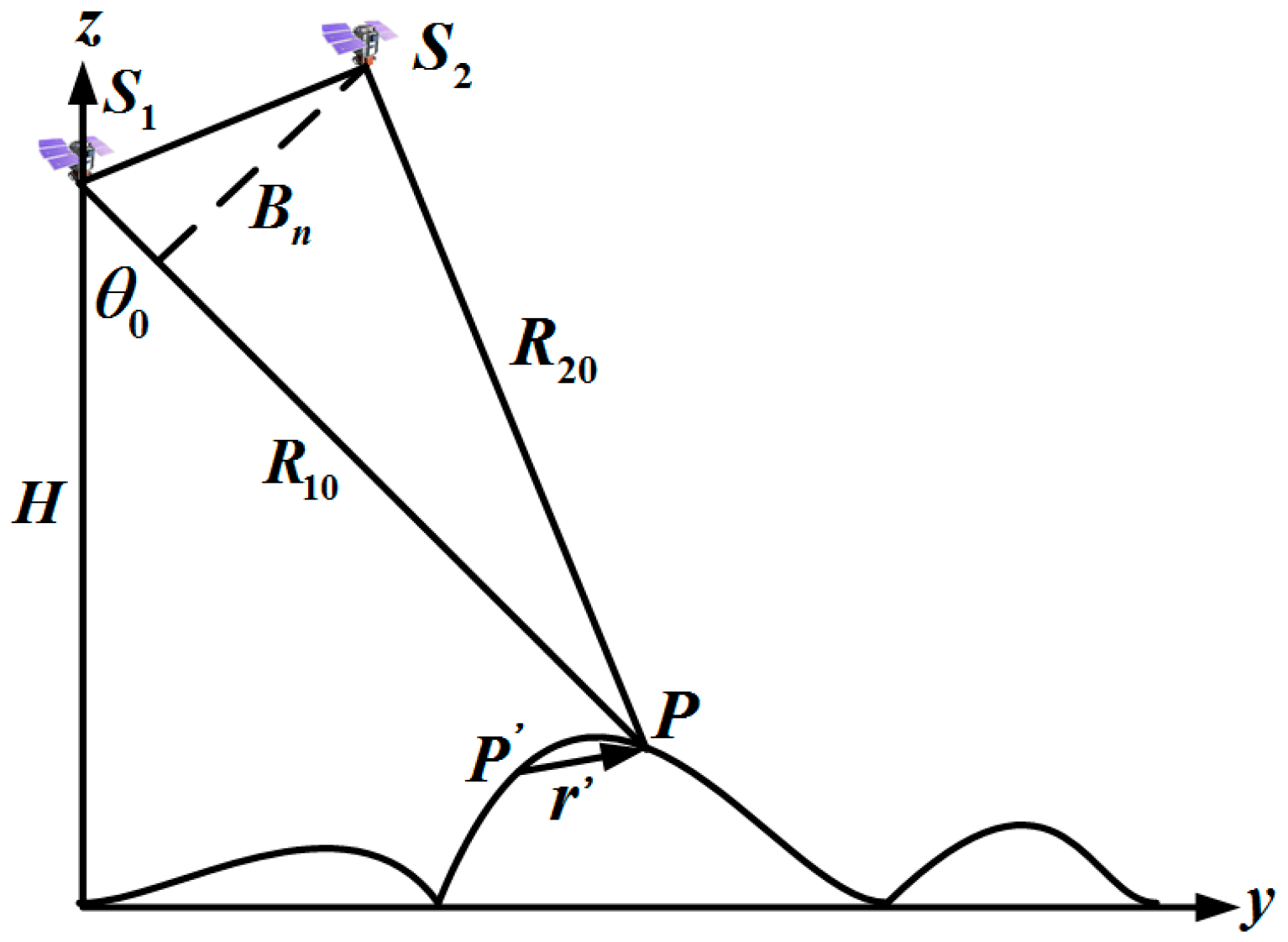
Figure 9 demonstrates the irradiation geometry of Pol-InSAR system.
Figure 9.
Two-layer structure of R-RVoG model.
Figure 9.
Two-layer structure of R-RVoG model.
where,
are the two Pol-SAR sensors used for the acquisition of Pol-InSAR data,
and
respectively stand for the referential and certain scattering points where the relative position between them is denoted as
,
represent the referential slant range distances of two sensors,
is the incident angle,
indicates the effective baseline and
is the height of the platform.
According to the geometrical relationship in
Figure 9, the SAR signals for interferometry can be given as:
where,
denotes the amplitude loss,
stands for the wave number,
are the scattering functions submitting to circular complex Gaussian distribution,
refer to the SAR impulse response functions at
and
denotes the additive Gaussian noise.
The cross and auto- correlations of
and
can be respectively described as:
where,
is the noise variance.
Considering that both of the volume and ground layers rotate with the ground plane, therefore, they are horizontally homogeneous along the inclined range direction with a normalized distribution perpendicular to the slant ground.
The normalized functions of the ground and volume layers can be separately updated as:
where,
is the height variable in the direction vertical to the range-sloped ground and factor
quantitatively describes the gradient of underlying topography.
Then, the second-order scattering statistics of R-RVoG model can be expressed as:
where,
and
respectively denote the total backscattering coefficients and the temporally stable backscattering coefficients of two layers.
For further deductions, the phase delay in Equation (6) needs to be expanded at relevant reference point in the inclined ground plane.
where,
is the phase difference at reference point caused by the slant range deviation between two SAR platforms,
and
are the wave numbers along slant and vertical directions.
Corresponding integrals in vertical direction can be defined as:
As for the inclined ground plane, relevant integrals can be expressed as:
According to above-mentioned deductions, Equation (6) can be simplified as:
Therefore, the complex correlation of R-RVoG model can be written as:
where,
is the ground-to-volume scattering ratio,
and
respectively stand for the temporal and volumetric decorrelations at different SAR platforms,
refers to the baseline decorrelation and
is the thermal decorrelation mainly related to the SNR of the system [
27].
In conjunction with Equations (7) and (11), it is not difficult to find that
equals to one and
is a function of
,
and
.
When the range slope variable comes to zero, Equation (15) will convert into the volume coherent function in flat terrain as Equation (3).
Furthermore, assuming that Pol-InSAR systems satisfy relations of
,
and
. Then, Equation (14) can be further simplified as:
What can be concluded from Equation (16) is that the introduction of range slope variable does not break the linearity of the complex coherent function. Thus, three-stage operation is still available based on this R-RVoG model.
4. Three-Stage Processing of Simulated Data Based on R-RVoG Model
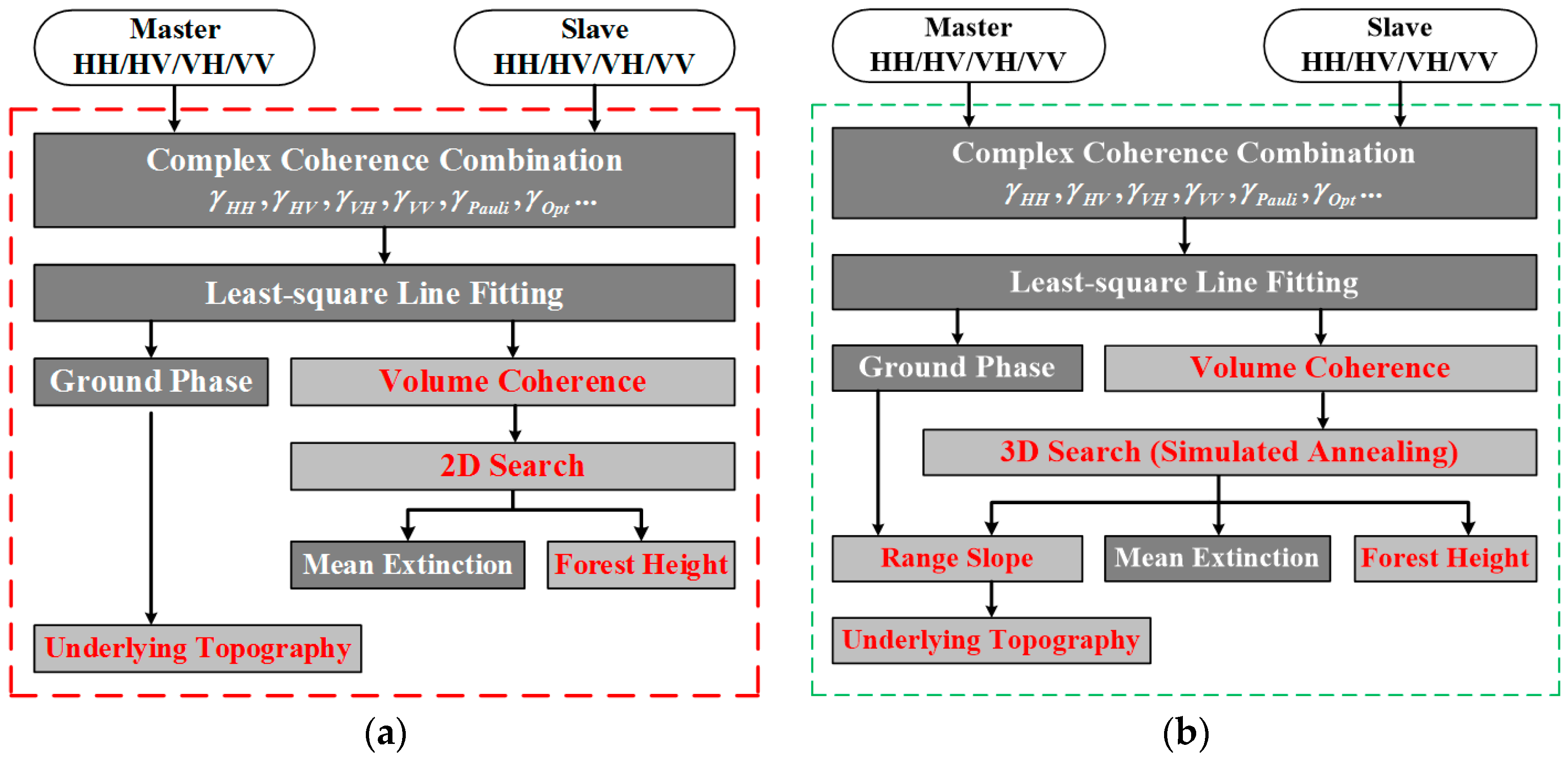
In this part, three-stage operations based on R-RVoG model are performed under the same conditions as in
Section 2. However, the participation of range slope factor increases the complexity of three-stage algorithm and also brings down its calculation efficiency. In this context, Simulated Annealing (SA) optimization algorithm is employed and incorporated into iteration to improve the computing efficiency of three dimensional (3D) search [
28,
29,
30]. The detailed procedures of three-stage process before and after adjustment are listed in
Figure 10.
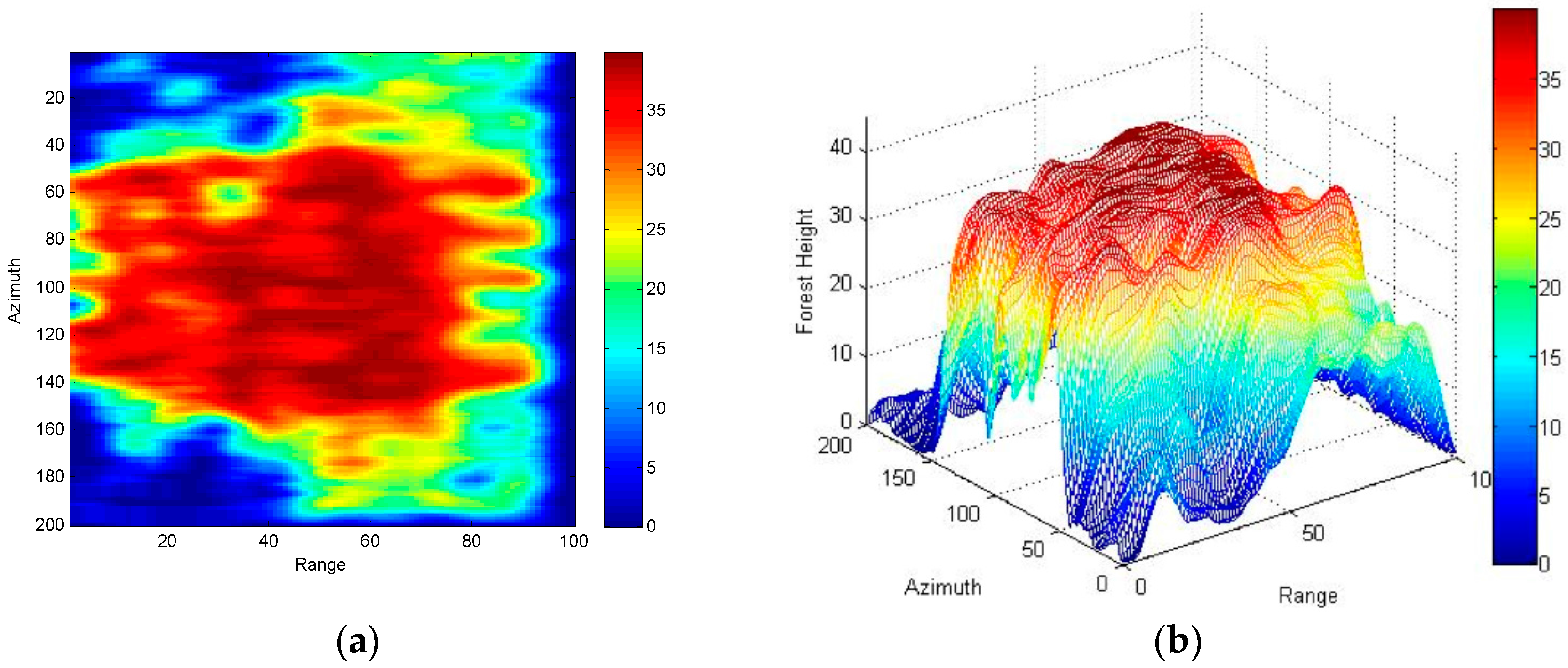
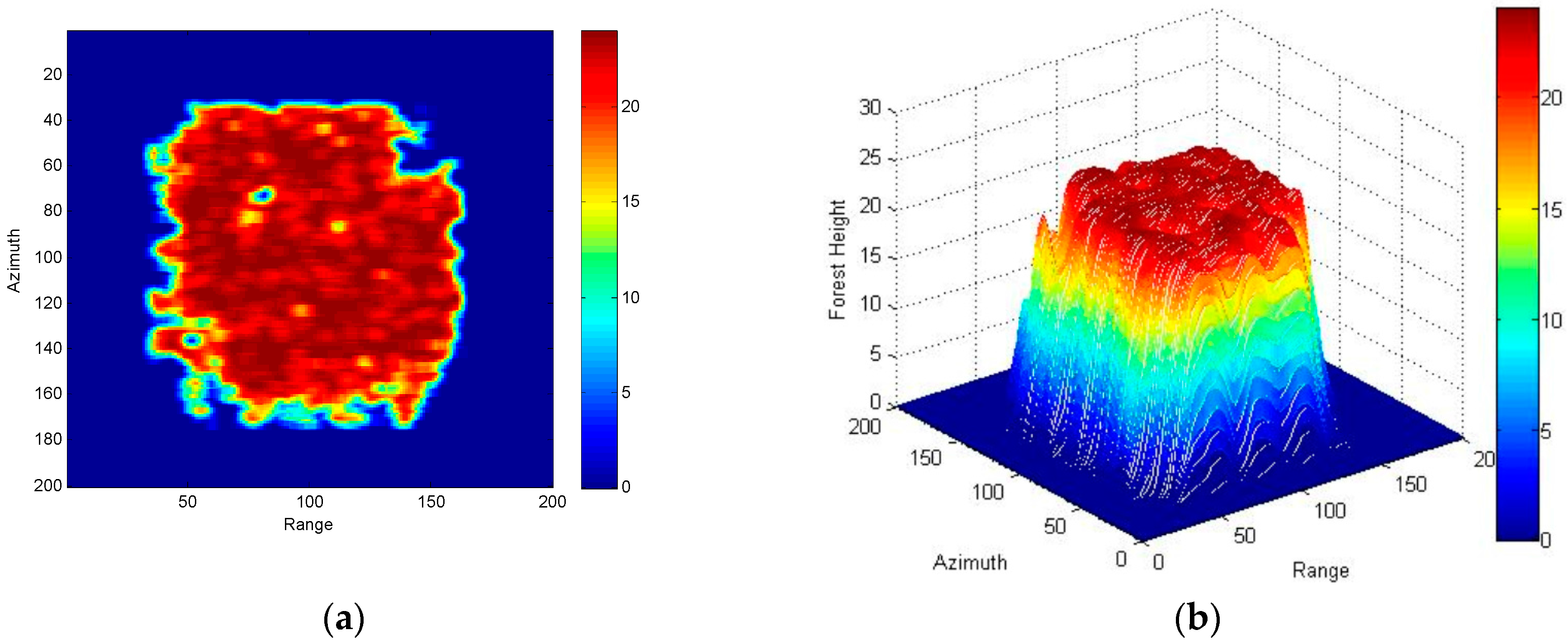
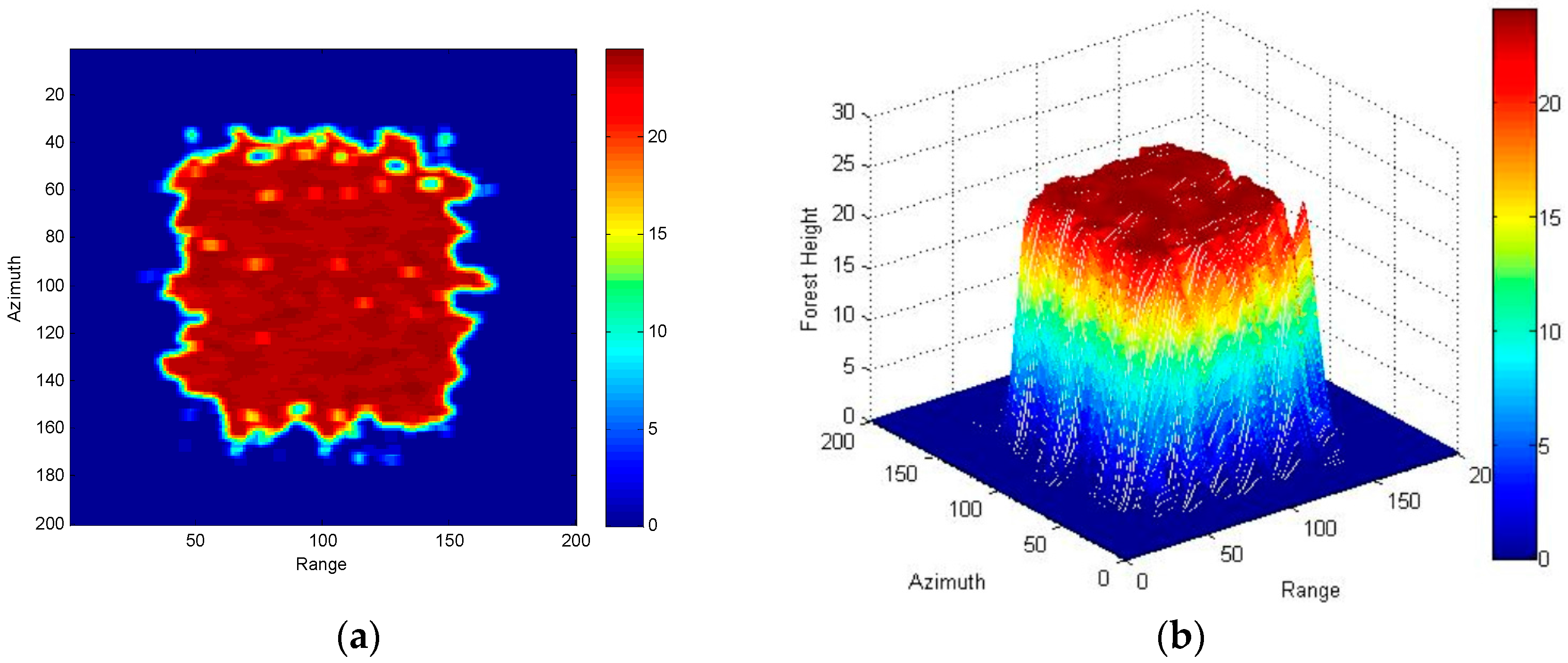
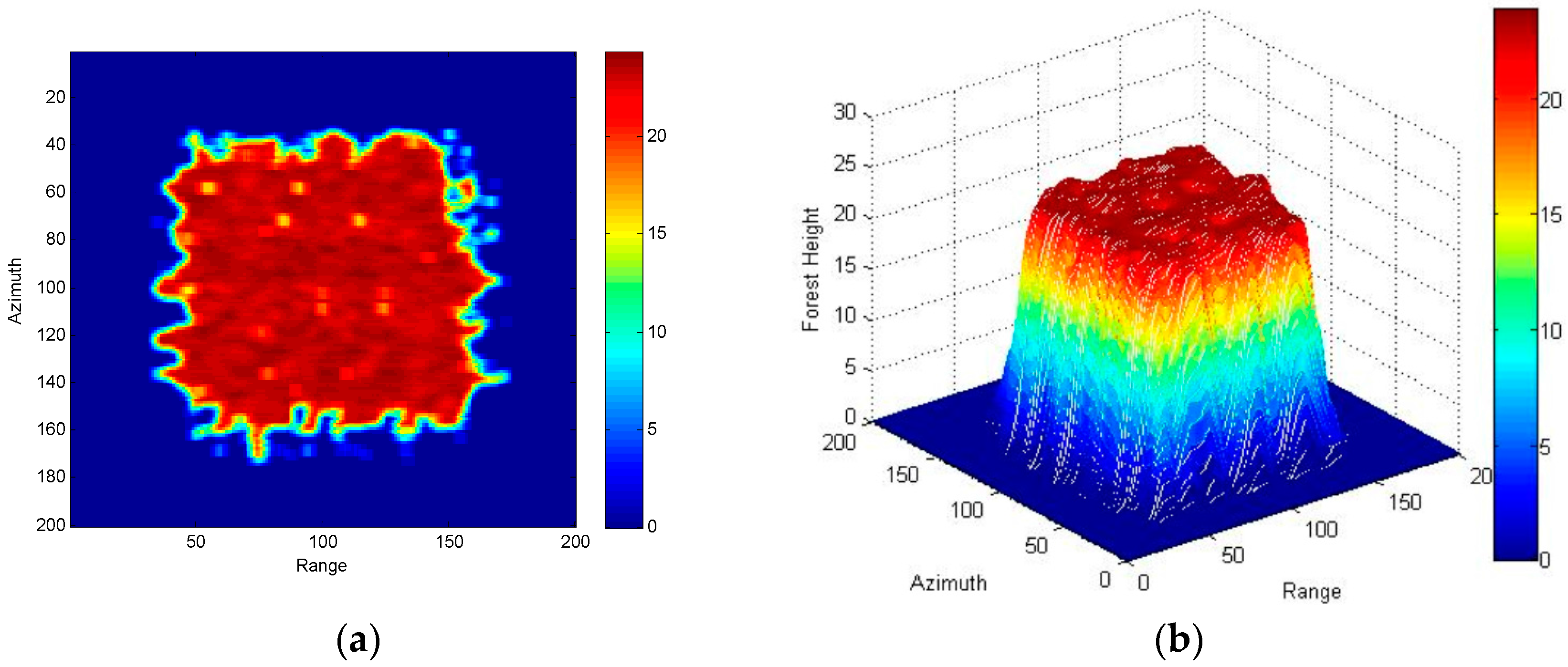
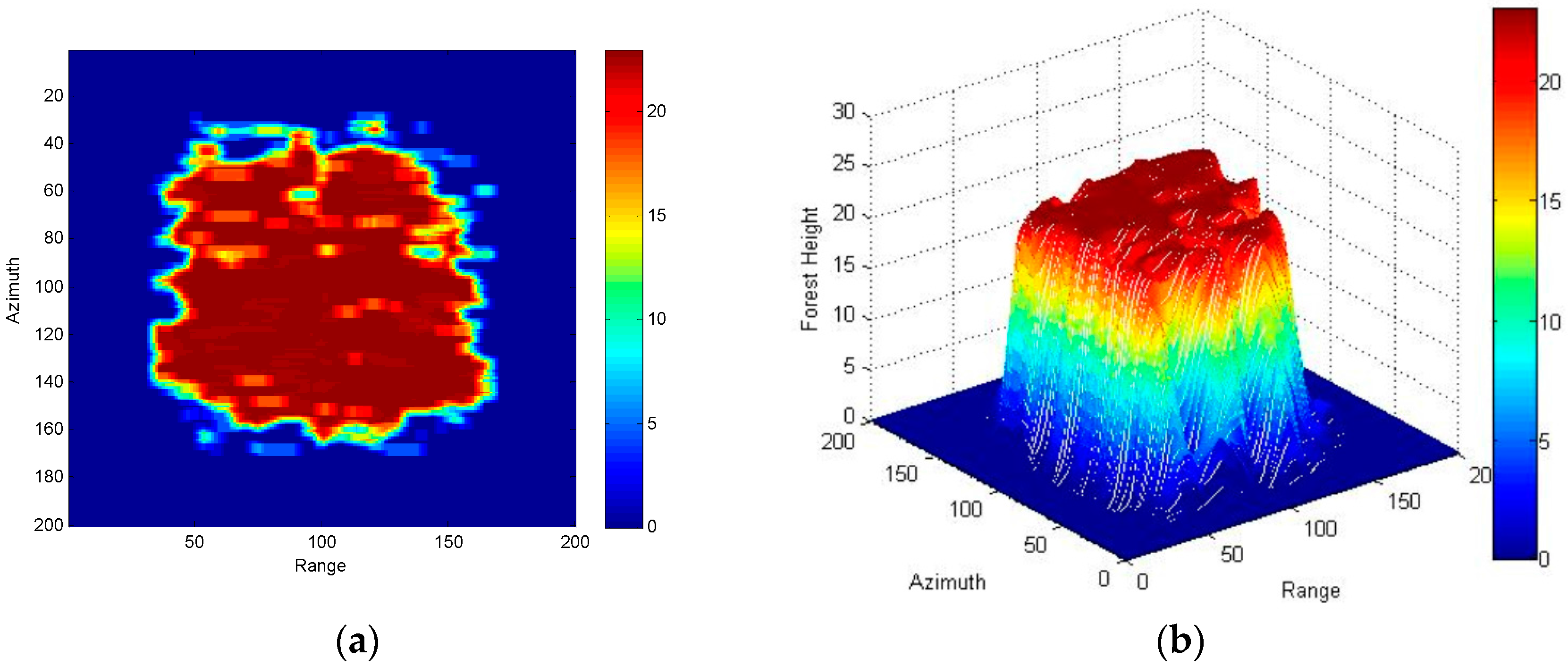
During the process, Matlab is employed as a primary programming language under the hardware condition of 2.6 GHz main frequency Central Processing Unit (CPU) and 4 GB internal storage. After the execution of three-stage process based on R-RVoG model,
Figure 11,
Figure 12,
Figure 13 and
Figure 14 respectively present the inversion results of forest height when the range slopes are set at 0°, 10°, 20° and 30°.
Table 3 lists the AVG bias, SDEV and RMSE of the estimated forest heights just like
Section 2 so that the performance of three-stage process based on R-RVoG model can be equivalently assessed.
In combination with
Table 2,
Figure 15 plots the variation tendencies of the height estimation biases based on RVoG and R-RVoG inversions under different range slopes.
As it is indicated in
Figure 15, the increasing tendency of estimation biases is effectively under control with the introduction of the range slope parameter in R-RVoG correlated model.
Figure 16 shows the inversed underlying topographies in three-dimension by utilizing both of the retrieved ground phase and the estimated range slope.
Table 4 calculates the absolute biases between the estimated range slopes and the real ones to evaluate the accuracy of reconstructed underlying topographies.
The conclusion can be made from above analysis that the R-RVoG model not only can prevent three-stage algorithm from the influence of range slope variation but also has the ability to improve the reconstructed precision of underlying topography.
5. Three-Stage Processing of Real Data Based on R-RVoG Model
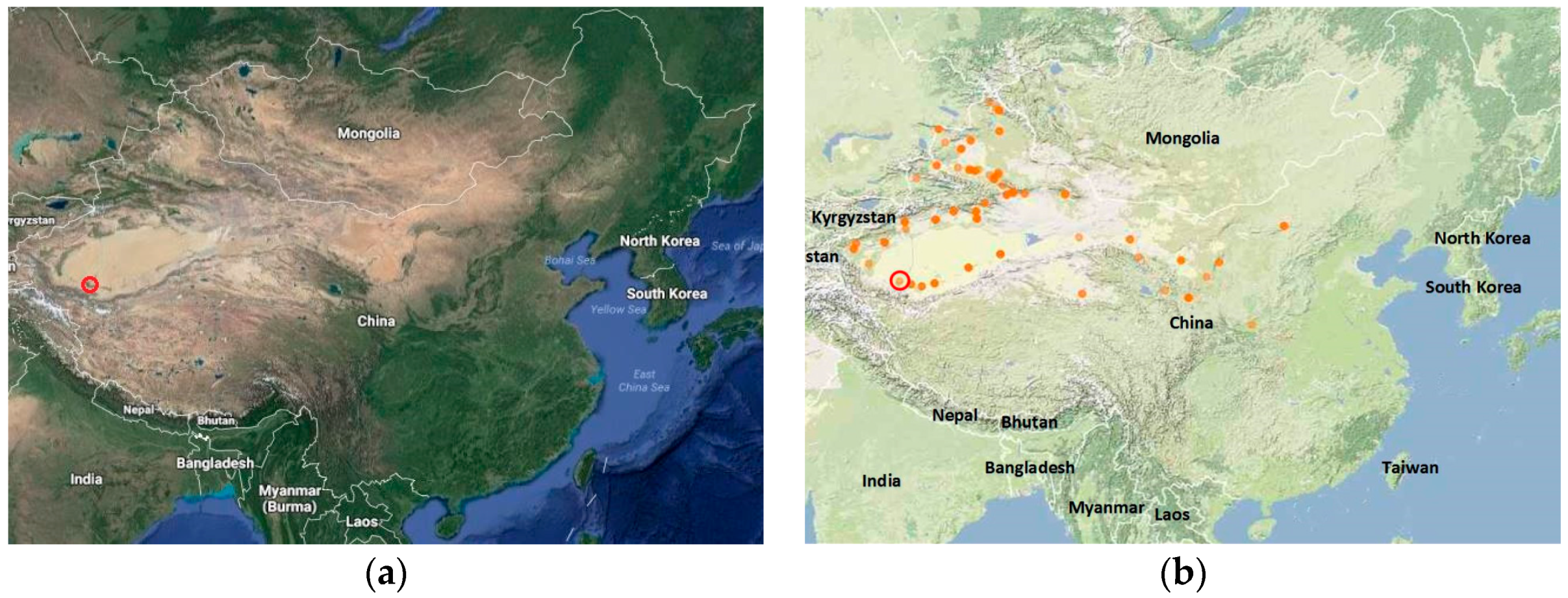
In this section, the parameter estimation behavior of three-stage algorithm based on R-RVoG model is evaluated from the aspect of real space-borne L-band SAR data in Tianshan forest test site, acquired by SIR-C sensors in 1994.
The Tianshan test area is located in Hotan, Sinkiang Province, mainly covered by deserts. The primary tree species in that area is Populus Euphratica which generally grows in dry environment at altitudes of up to 4000 m above sea level with average height between 15 m and 25 m.
Figure 17 shows the location of the test area and the distribution of Populus diversifolia in China [
31].
According to [
32], the Space-borne Imaging Radar-C/X-band Synthetic Aperture Radar (SIR-C and X-SAR) sensors are recruited to obtain Digital Elevation Models (DEMs) on a near-global scale from 56°S to 60°N for the Shuttle Radar Topography Mission (SRTM) research. The data sets utilized in our research are acquired by SIR-C sensor in repeat-pass configuration. Relevant parameters of SIR-C sensor are provided in
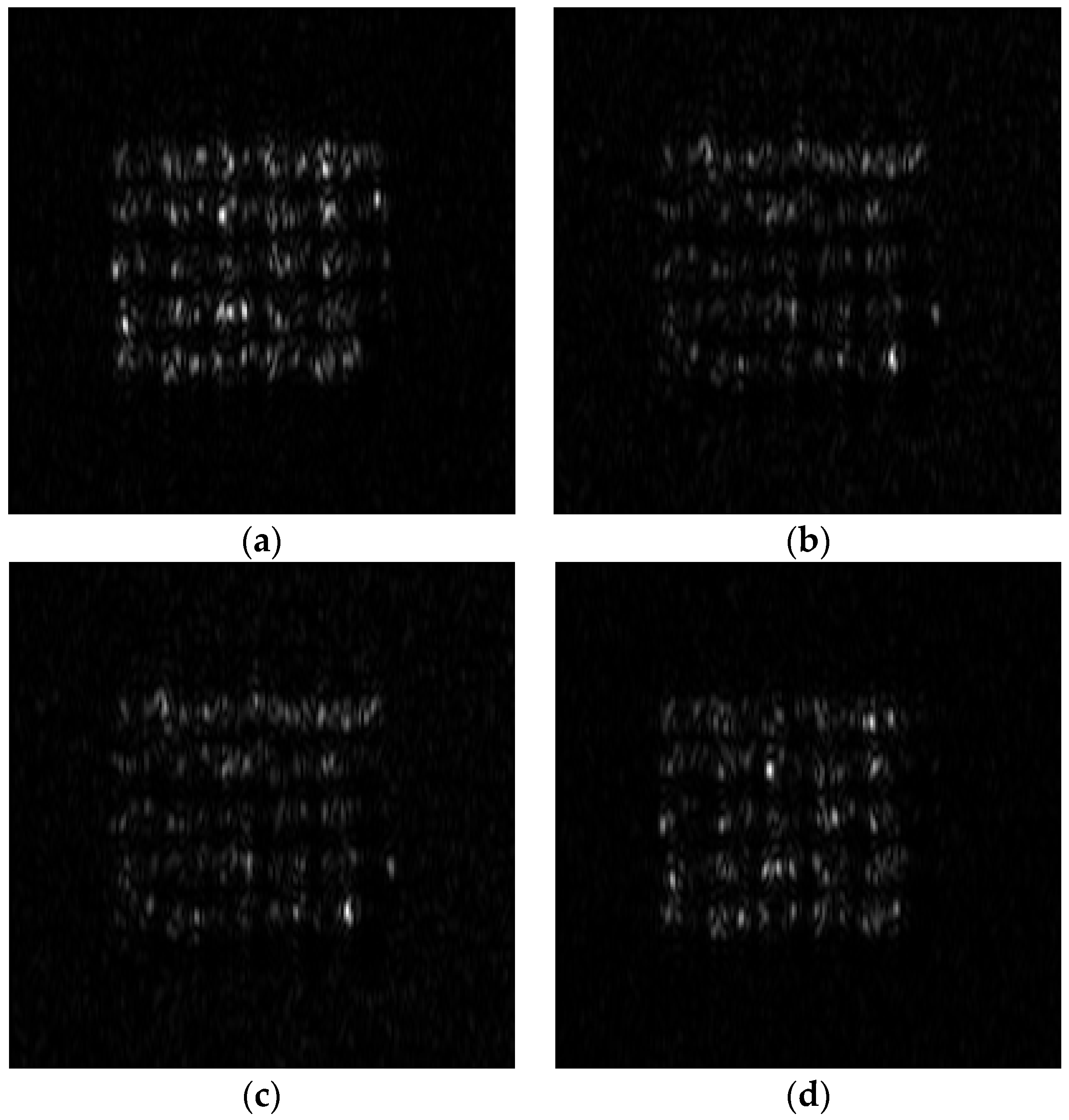
Table 5 and the fully polarimetric SAR images of the first orbit are displayed in
Figure 18.
As an evaluation criteria, the forest height and underlying ground phase used as true value are separately acquired by PolSARpro software and DEM difference [
33,
34].
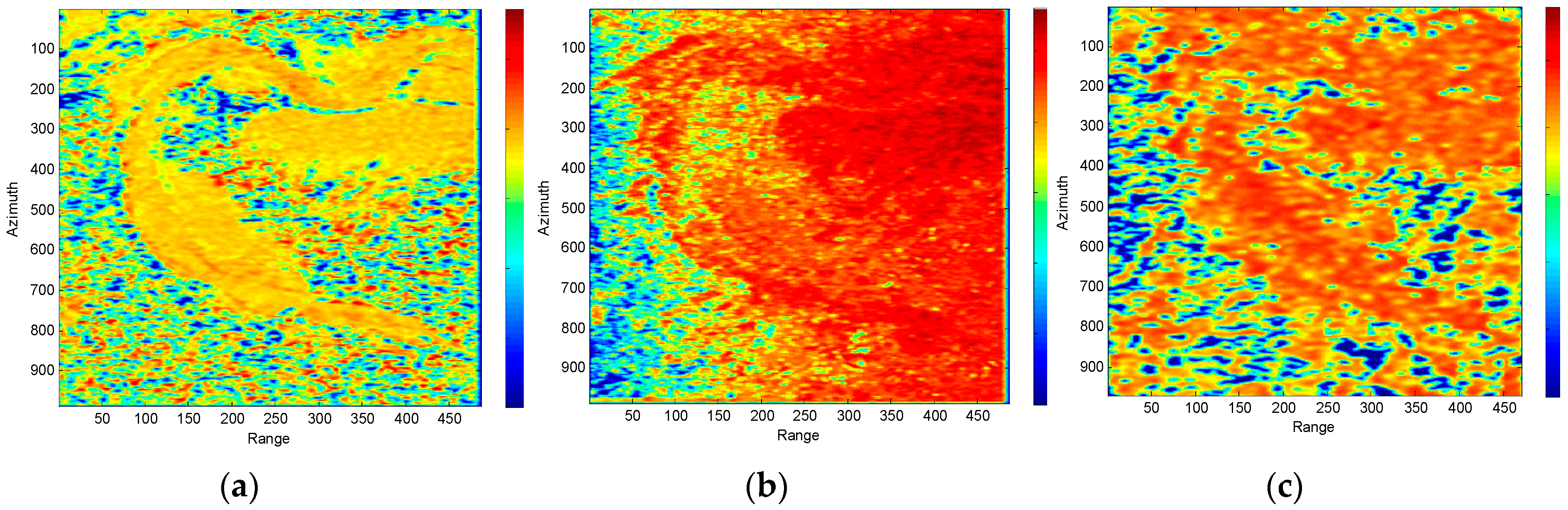
For the purpose of comparison, the same data set is respectively processed by three-stage algorithm based on traditional RVoG model and modified R-RVoG model. Corresponding inversion results are demonstrated in the following figures where
Figure 19 demonstrates the inversion results of forest height,
Figure 20 and
Figure 21 depicts the estimated ground phase before and after the operation of phase unwrapping. The effectiveness of the inversion results can be easily recognized through comparison.
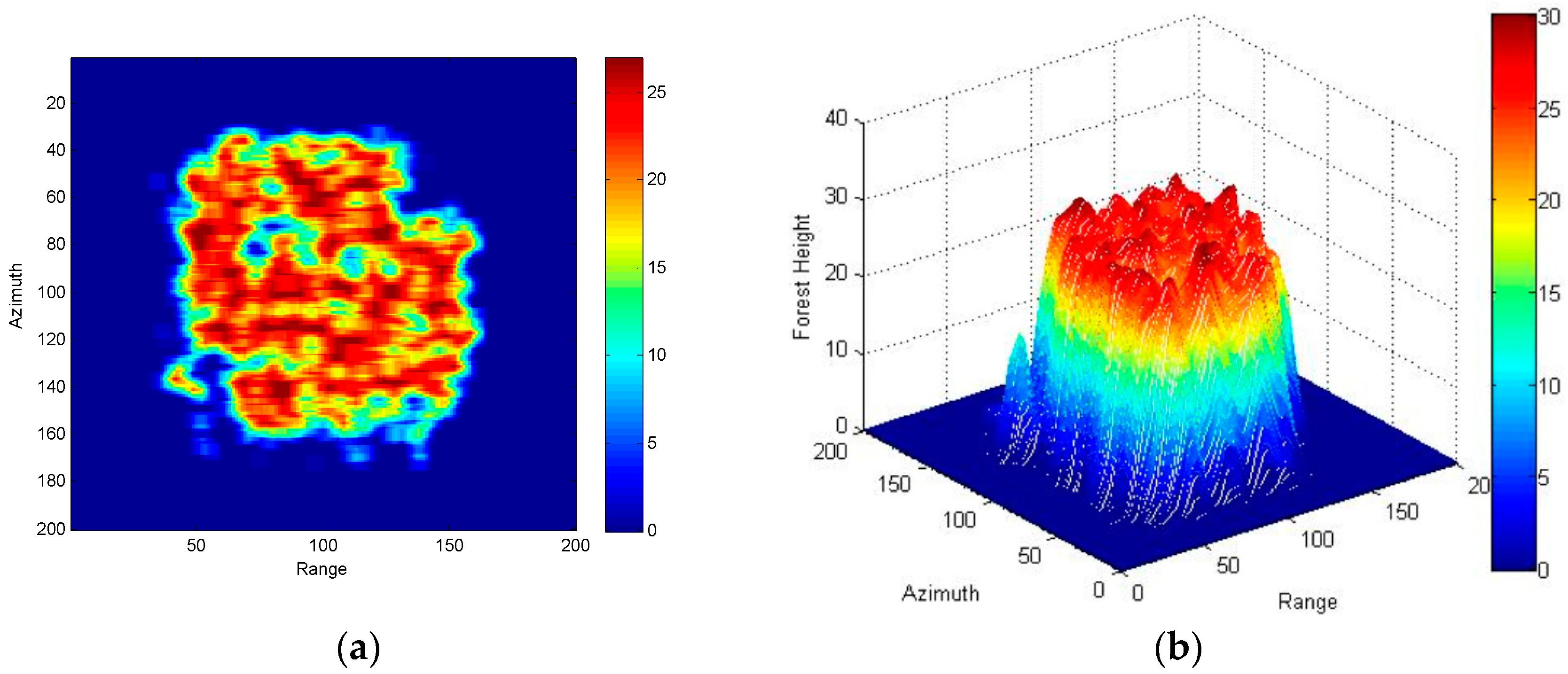
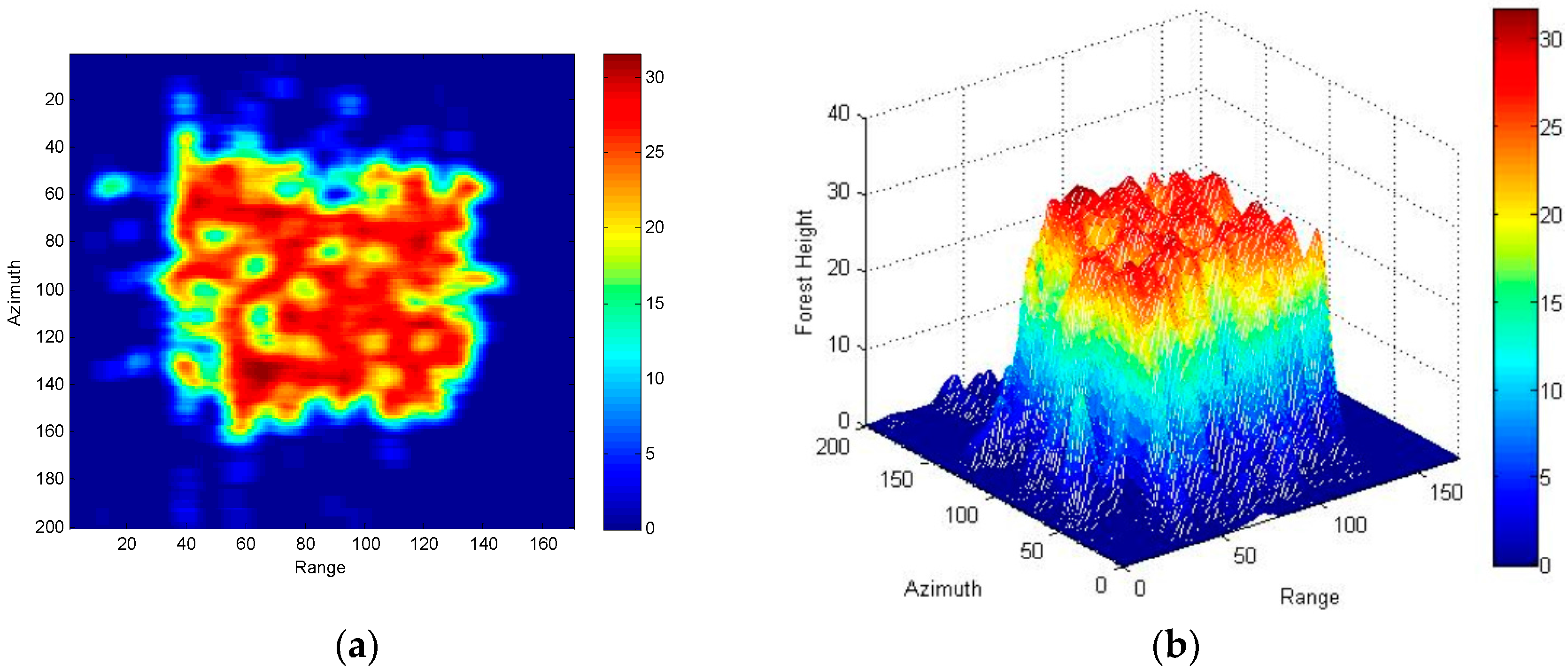
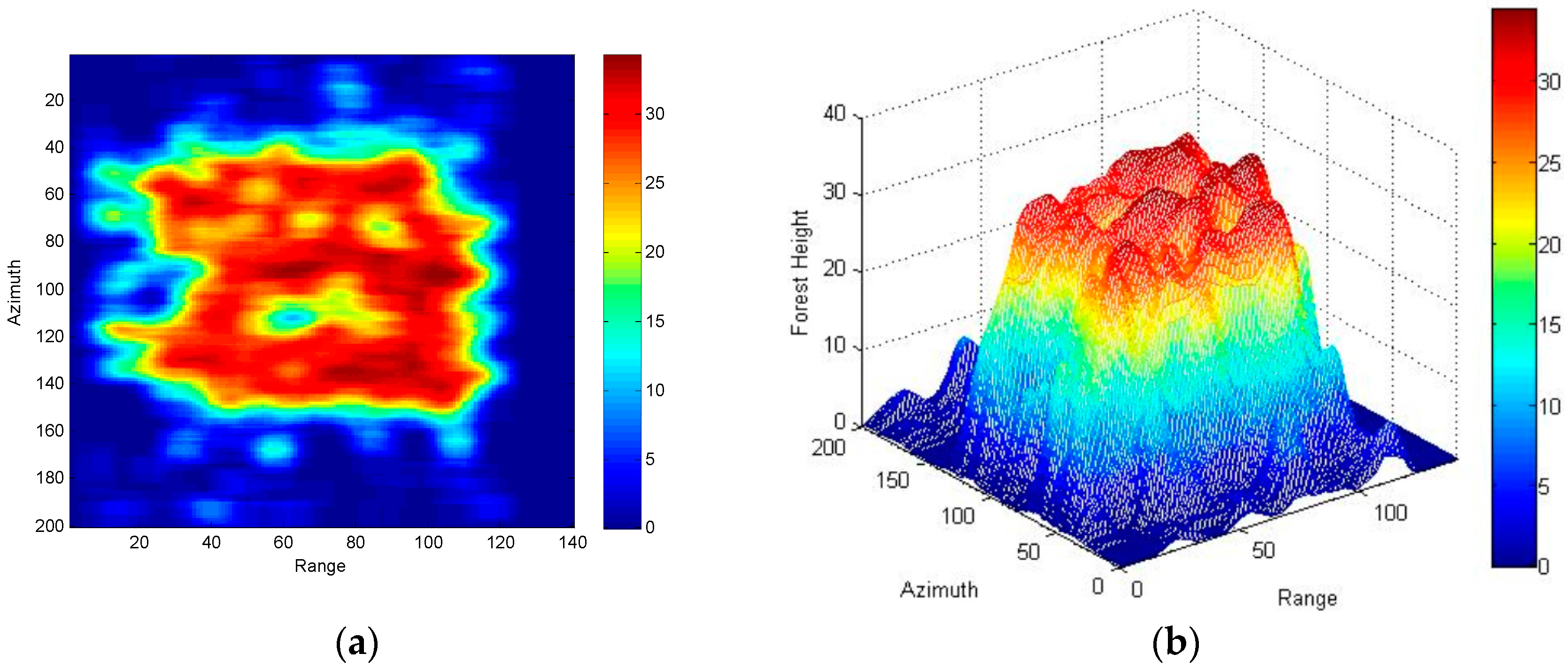
Intuitively, it can be seen from the estimated forest heights in
Figure 19 that in comparison with traditional three-stage algorithm based on RVoG model, the improved algorithm can better reconstruct the basic profile of forest area. Quantitatively, in
Table 6, the AVG bias, SDEV and RMSE of the estimated forest heights are respectively calculated as above to evaluate the performance of different algorithms.
Comparing with traditional estimation scheme based on RVoG model, the AVG bias, SDEV and RMSE of R-RVoG inversion are correspondingly 1.6885 m, 0.1405 m and 0.9893 m closer to the true value. Therefore, the estimated forest heights based on the modified algorithm validate the improvement of height inversion precision.
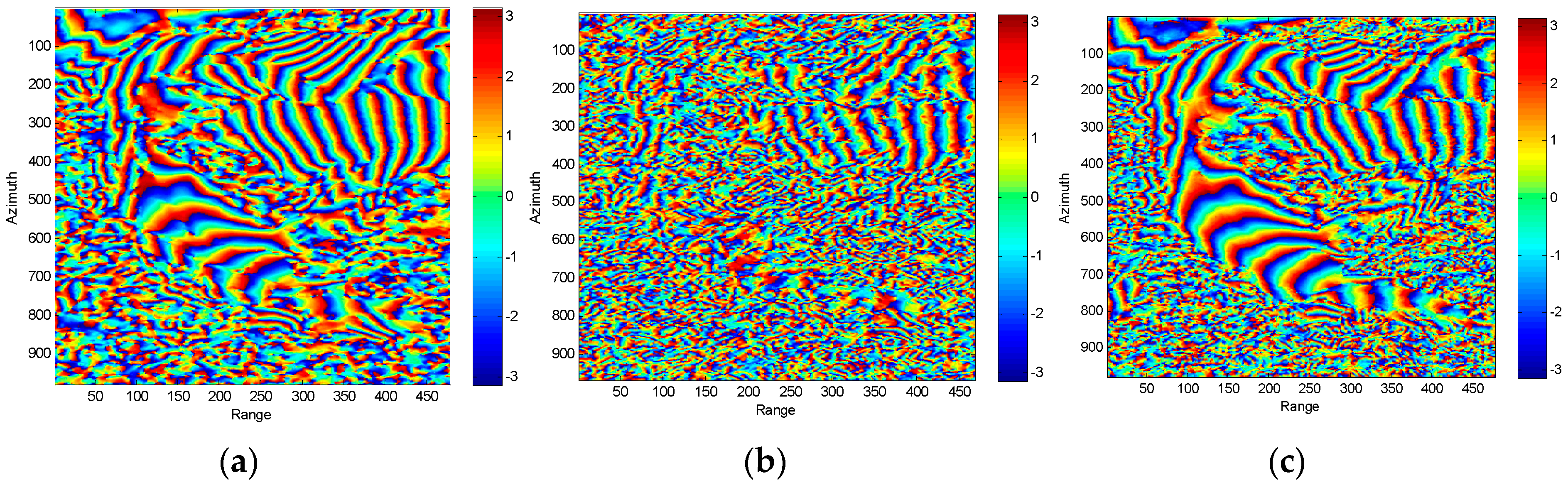
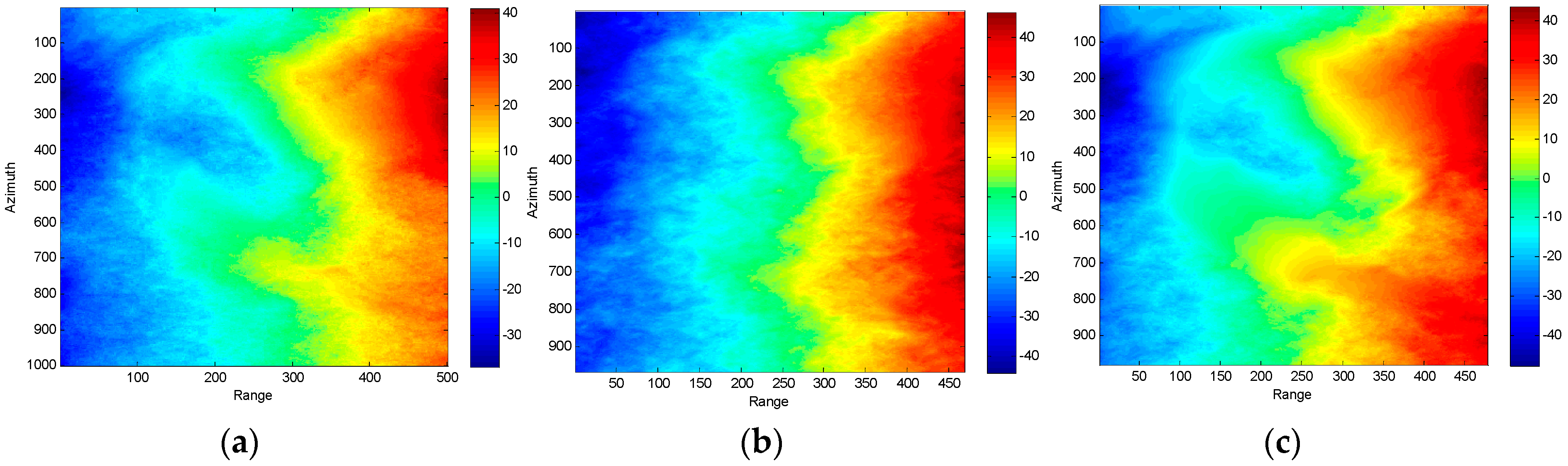
Figure 20 and
Figure 21 respectively demonstrate the estimated ground phase before and after phase unwrapping. Here, Least Square Phase Unwrapping algorithm based on Discrete Cosine Transformation (DCT) is employed to accomplish the phase unwrapping operation [
35].
The inversion results in
Figure 20 and
Figure 21 can draw to the conclusion that the modified algorithm effectively prevents the interferometric fringes of the ground phase from the destruction of range slope variation and thus provides a vital premise for the further phase unwrapping and elevation reconstruction.
Despite that the inversion precision of three-stage algorithm is enhanced with the introduction of R-RVoG model, there are still differences between the true value and the estimated result. This is mainly caused by the small error imported during the estimation of range slope and the unexecuted pre-compensation of azimuth slope. Further works will concentrate on the improvements of these two aspects.
6. Conclusions
This paper proposes a modified three-stage algorithm based on R-RVoG model to extract forest parameters from Pol-InSAR data. Similarly to traditional RVoG model, R-RVoG model is contributed by both of the volume and ground layers. Differences are that in R-RVoG model the ground component is amended as a range-sloped plane and the volume part is characterized as an inclined cloud of discrete particles. After detailed deduction, a new range slope parameter is introduced into the complex correlation of this modified model and the three-stage procedure is further rebuilt to develop the estimation operation where the SA optimization algorithm is employed to ensure the calculation efficiency and accuracy. The performance of this modified algorithm is further evaluated on both of the simulated data and SIR-C real data. Estimation results indicates that in comparison with the traditional RVoG model, the retrieved forest heights based on R-RVoG model are less affected by the range slope variation in terms of AVG bias, RMSE, and SDEV. Furthermore, from the perspective of ground phase, the reconstruction precision of underlying topography is also improved.
The modified three-stage algorithm based on R-RVoG model is quite applicable for the processing of Pol-InSAR data. However, further theoretical and experimental researches need to be conducted when both of the range and azimuth slope are under consideration so that the possibilities and limits of Pol-InSAR system can be better investigated.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}