

Advancements in Sensor Technologies and Control Strategies for Lower-Limb Rehabilitation Exoskeletons: A Comprehensive Review
 ,
,  , ,
, ,  and
and 
Abstract
:1. Introduction
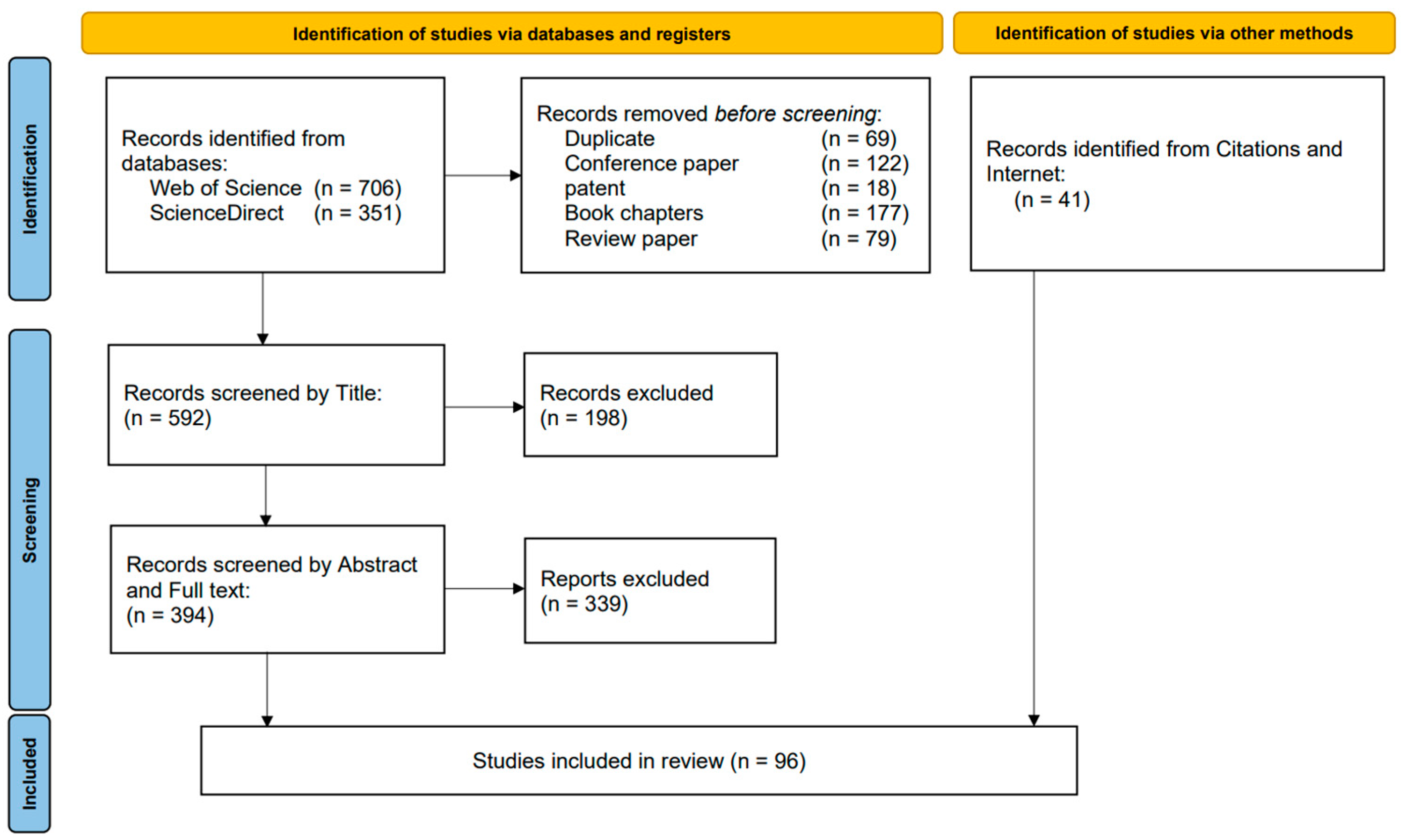
2. Methodology
3. Sensors and Monitoring Systems for Lower-Limb Exoskeletons
3.1. Human Signal-Monitoring Sensors
3.2. Kinematic- and Kinetic-Measurement Sensors
3.3. Environmental and Other Types of Sensors
- Optical sensors: These sensors use light to measure the displacement, velocity, or position of objects. Optical encoders or cameras can be utilized for tracking limb movements, providing data for precise control and coordination of the exoskeleton [79].
- Ultrasonic sensors: By emitting and receiving ultrasonic waves, these sensors can determine the distance to nearby objects, assisting in obstacle detection and avoidance for exoskeleton users [28].
- Tactile sensors: These sensors can detect touch, pressure, or vibrations and can be embedded in areas where the exoskeleton interacts with the user’s body, providing feedback on fit and comfort [80].
- Temperature sensors: These sensors monitor temperature changes and can be integrated into exoskeleton systems to ensure that motors, batteries, or other components do not overheat during operation [81].
4. Control of the Lower-Limb Rehabilitation Exoskeleton
4.1. Assist-As-Needed (AAN) Control Strategies
4.2. Model-Free and Intelligent Control Strategies
4.3. Model-Based Control Strategies
4.4. Hybrid Control Strategies
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhou, L.; Chen, W.; Chen, W.; Bai, S.; Zhang, J.; Wang, J. Design of a passive lower limb exoskeleton for walking assistance with gravity compensation. Mech. Mach. Theory 2020, 150, 103840. [Google Scholar] [CrossRef]
- Chen, Q.; Cheng, H.; Yue, C.; Huang, R.; Guo, H. Dynamic Balance Gait for Walking Assistance Exoskeleton. Appl. Bionics Biomech. 2018, 2018, 7847014. [Google Scholar] [CrossRef] [PubMed]
- Kagirov, I.; Kapustin, A.; Kipyatkova, I.; Klyuzhev, K.; Kudryavcev, A.; Kudryavcev, I.; Loskutov, Y.; Ryumin, D.; Karpov, A. Medical exoskeleton “Remotion” with an intelligent control system: Modeling, implementation, and testing. Simul. Model. Pract. Theory 2021, 107, 102200. [Google Scholar] [CrossRef]
- Chen, G.; Qi, P.; Guo, Z.; Yu, H. Mechanical design and evaluation of a compact portable knee–ankle–foot robot for gait rehabilitation. Mech. Mach. Theory 2016, 103, 51–64. [Google Scholar] [CrossRef]
- Yang, S.; Han, J.; Xia, L.; Chen, Y.-H. An optimal fuzzy-theoretic setting of adaptive robust control design for a lower limb exoskeleton robot system. Mech. Syst. Signal Process. 2020, 141, 106706. [Google Scholar] [CrossRef]
- Shi, D.; Zhang, W.; Zhang, W.; Ding, X. Assist-as-needed attitude control in three-dimensional space for robotic rehabilitation. Mech. Mach. Theory 2020, 154, 104044. [Google Scholar] [CrossRef]
- Sado, F.; Yap, H.J.; Ghazilla, R.A.R.; Ahmad, N. Design and control of a wearable lower-body exoskeleton for squatting and walking assistance in manual handling works. Mechatronics 2019, 63, 102272. [Google Scholar] [CrossRef]
- Akdoğan, E.; Adli, M.A. The design and control of a therapeutic exercise robot for lower limb rehabilitation: Physiotherabot. Mechatronics 2011, 21, 509–522. [Google Scholar] [CrossRef]
- Cardona, M.; García Cena, C.E.; Serrano, F.; Saltaren, R. ALICE: Conceptual Development of a Lower Limb Exoskeleton Robot Driven by an On-Board Musculoskeletal Simulator. Sensors 2020, 20, 789. [Google Scholar] [CrossRef]
- Bernhardt, M.; Frey, M.; Colombo, G.; Riener, R. Hybrid Force-Position Control Yields Cooperative Behaviour of the Rehabilitation Robot Lokomat. In Proceedings of the 9th International Conference on Rehabilitation Robotics, Chicago, IL, USA, 28 June –1 July 2005; pp. 536–539. [Google Scholar] [CrossRef]
- Yang, M.; Wang, X.; Zhu, Z.; Xi, R.; Wu, Q. Development and control of a robotic lower limb exoskeleton for paraplegic patients. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 1087–1098. [Google Scholar] [CrossRef]
- Han, S.; Wang, H.; Tian, Y. A linear discrete-time extended state observer-based intelligent PD controller for a 12 DOFs lower limb exoskeleton LLE-RePA. Mech. Syst. Signal Process. 2020, 138, 106547. [Google Scholar] [CrossRef]
- Zeilig, G.; Weingarden, H.; Zwecker, M.; Dudkiewicz, I.; Bloch, A.; Esquenazi, A. Safety and tolerance of the ReWalk TM exoskeleton suit for ambulation by people with complete spinal cord injury: A pilot study. J. Spinal Cord Med. 2012, 35, 96–101. [Google Scholar] [CrossRef]
- Pransky, J. The Pransky interview: Russ Angold, Co-Founder and President of EksoTM Labs. Ind. Robot Int. J. 2014, 41, 329–334. [Google Scholar] [CrossRef]
- Barrutia, W.S.; Bratt, J.; Ferris, D.P. A Human Lower Limb Mechanical Phantom for the Testing of Knee Exoskeletons. IEEE Trans. NEURAL Syst. Rehabil. Eng. 2023, 31, 2497–2506. [Google Scholar] [CrossRef] [PubMed]
- Hsu, T.-H.; Tsai, C.-L.; Chi, J.-Y.; Hsu, C.-Y.; Lin, Y.-N. Effect of wearable exoskeleton on post-stroke gait: A systematic review and meta-analysis. Ann. Phys. Rehabil. Med. 2023, 66, 101674. [Google Scholar] [CrossRef] [PubMed]
- Taki, S.; Imura, T.; Iwamoto, Y.; Imada, N.; Tanaka, R.; Araki, H.; Araki, O. Effects of Exoskeletal Lower Limb Robot Training on the Activities of Daily Living in Stroke Patients: Retrospective Pre-Post Comparison Using Propensity Score Matched Analysis. J. Stroke Cerebrovasc. Dis. 2020, 29, 105176. [Google Scholar] [CrossRef] [PubMed]
- Peña, G.G.; Consoni, L.J.; dos Santos, W.M.; Siqueira, A.A.G. Feasibility of an optimal EMG-driven adaptive impedance control applied to an active knee orthosis. Robot. Auton. Syst. 2019, 112, 98–108. [Google Scholar] [CrossRef]
- Qiu, S.; Zhao, H.; Jiang, N.; Wang, Z.; Liu, L.; An, Y.; Zhao, H.; Miao, X.; Liu, R.; Fortino, G. Multi-sensor information fusion based on machine learning for real applications in human activity recognition: State-of-the-art and research challenges. Inf. Fusion 2022, 80, 241–265. [Google Scholar] [CrossRef]
- Narayan, J.; Auepanwiriyakul, C.; Jhunjhunwala, S.; Abbas, M.; Dwivedy, S.K. Hierarchical Classification of Subject-Cooperative Control Strategies for Lower Limb Exoskeletons in Gait Rehabilitation: A Systematic Review. Machines 2023, 11, 764. [Google Scholar] [CrossRef]
- Mohebbi, A. Human-Robot Interaction in Rehabilitation and Assistance: A Review. Curr. Robot. Rep. 2020, 1, 131–144. [Google Scholar] [CrossRef]
- Sun, Y.; Tang, Y.; Zheng, J.; Dong, D.; Chen, X.; Bai, L. From sensing to control of lower limb exoskeleton: A systematic review. Annu. Rev. Control 2022, 53, 83–96. [Google Scholar] [CrossRef]
- Foroutannia, A.; Akbarzadeh-T, M.-R.; Akbarzadeh, A. A deep learning strategy for EMG-based joint position prediction in hip exoskeleton assistive robots. Biomed. Signal Process. Control 2022, 75, 103557. [Google Scholar] [CrossRef]
- Yao, Y.; Rakheja, S.; Marcotte, P. Relationship among hand forces imparted on a viscoelastic hand-handle interface. Measurement 2019, 145, 525–534. [Google Scholar] [CrossRef]
- Huo, W.; Mohammed, S.; Amirat, Y.; Kong, K. Fast Gait Mode Detection and Assistive Torque Control of an Exoskeletal Robotic Orthosis for Walking Assistance. IEEE Trans. Robot. 2018, 34, 1035–1052. [Google Scholar] [CrossRef]
- Arnez-Paniagua, V.; Rifaï, H.; Amirat, Y.; Ghedira, M.; Gracies, J.M.; Mohammed, S. Adaptive control of an actuated ankle foot orthosis for paretic patients. Control Eng. Pract. 2019, 90, 207–220. [Google Scholar] [CrossRef]
- Li, X.; Pan, Y.; Chen, G.; Yu, H. Multi-modal control scheme for rehabilitation robotic exoskeletons. Int. J. Robot. Res. 2017, 36, 759–777. [Google Scholar] [CrossRef]
- Xue, X.; Zhang, B.; Moon, S.; Xu, G.-X.; Huang, C.-C.; Sharma, N.; Jiang, X. Development of a Wearable Ultrasound Transducer for Sensing Muscle Activities in Assistive Robotics Applications. Biosensors 2023, 13, 134. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; He, Y.; Chen, T.; Chen, X.; Tian, S. Real-Time Gait Event Detection for a Lower Extremity Exoskeleton Robot by Infrared Distance Sensors. IEEE Sens. J. 2021, 21, 27116–27123. [Google Scholar] [CrossRef]
- Faridi, P.; Mehr, J.K.; Wilson, D.; Sharifi, M.; Tavakoli, M.; Pilarski, P.M.; Mushahwar, V.K. Machine-learned Adaptive Switching in Voluntary Lower-limb Exoskeleton Control: Preliminary Results. In Proceedings of the 2022 International Conference on Rehabilitation Robotics (ICORR), Rotterdam, The Netherlands, 25–29 July 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Tian, H.; Li, X.; Wei, Y.; Ji, S.; Yang, Q.; Gou, G.-Y.; Wang, X.; Wu, F.; Jian, J.; Guo, H.; et al. Bioinspired dual-channel speech recognition using graphene-based electromyographic and mechanical sensors. Cell Rep. Phys. Sci. 2022, 3, 101075. [Google Scholar] [CrossRef]
- Yao, Y.; Rakheja, S.; Larivière, C.; Marcotte, P. Assessing Increased Activities of the Forearm Muscles Due to Anti-Vibration Gloves: Construct Validity of a Refined Methodology. Hum. Factors J. Hum. Factors Ergon. Soc. 2022, 64, 466–481. [Google Scholar] [CrossRef]
- Azmoudeh, B.; Cvetkovic, D. Wavelets in Biomedical Signal Processing and Analysis. In Encyclopedia of Biomedical Engineering; Narayan, R., Ed.; Elsevier: Oxford, UK, 2019; pp. 193–212. ISBN 978-0-12-805144-3. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, Y.; Luo, L.; Su, W.; Zhao, K.; Xu, C.; Huang, J.; Pi, M. Hybrid Brain/Muscle Signals Powered Wearable Walking Exoskeleton Enhancing Motor Ability in Climbing Stairs Activity. IEEE Trans. Med. Robot. Bionics 2019, 1, 218–227. [Google Scholar] [CrossRef]
- Tu, Y.; Zhu, A.; Song, J.; Zhang, X.; Cao, G. Design and Experimental Evaluation of a Lower-Limb Exoskeleton for Assisting Workers With Motorized Tuning of Squat Heights. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 184–193. [Google Scholar] [CrossRef]
- Huang, G.; Ceccarelli, M.; Huang, Q.; Zhang, W.; Yu, Z.; Chen, X.; Mai, J. Design and Feasibility Study of a Leg-exoskeleton Assistive Wheelchair Robot with Tests on Gluteus Medius Muscles. Sensors 2019, 19, 548. [Google Scholar] [CrossRef] [PubMed]
- Choi, H.S.; Lee, C.H.; Baek, Y.S. Design and Validation of a Two-Degree-of-Freedom Powered Ankle-Foot Orthosis with Two Pneumatic Artificial Muscles. Mechatronics 2020, 72, 102469. [Google Scholar] [CrossRef]
- He, Y.; Li, N.; Wang, C.; Xia, L.; Yong, X.; Wu, X. Development of a novel autonomous lower extremity exoskeleton robot for walking assistance. Front. Inf. Technol. Electron. Eng. 2019, 20, 318–329. [Google Scholar] [CrossRef]
- Hassani, W.; Mohammed, S.; Rifaï, H.; Amirat, Y. Powered orthosis for lower limb movements assistance and rehabilitation. Control Eng. Pract. 2014, 26, 245–253. [Google Scholar] [CrossRef]
- Yi, C.; Jiang, F.; Zhang, S.; Guo, H.; Yang, C.; Ding, Z.; Wei, B.; Lan, X.; Zhou, H. Continuous Prediction of Lower-Limb Kinematics From Multi-Modal Biomedical Signals. IEEE Trans. Circuits Syst. Video Technol. 2022, 32, 2592–2602. [Google Scholar] [CrossRef]
- Bayon, C.; Keemink, A.Q.L.; van Mierlo, M.; Rampeltshammer, W.; van der Kooij, H.; van Asseldonk, E.H.F. Cooperative ankle-exoskeleton control can reduce effort to recover balance after unexpected disturbances during walking. J. NeuroEng. Rehabil. 2022, 19, 21. [Google Scholar] [CrossRef] [PubMed]
- Jradi, R.; Rifai, H.; Mohammed, S. Adaptive Active Disturbance Rejection Control of an Actuated Ankle Foot Orthosis for Ankle Movement Assistance. IEEE Robot. Autom. Lett. 2024, 9, 367–374. [Google Scholar] [CrossRef]
- Luo, S.; Androwis, G.; Adamovich, S.; Nunez, E.; Su, H.; Zhou, X. Robust walking control of a lower limb rehabilitation exoskeleton coupled with a musculoskeletal model via deep reinforcement learning. J. NeuroEng. Rehabil. 2023, 20, 34. [Google Scholar] [CrossRef]
- Jakab, K.; Csipor, J.; Ulbert, I.; Keresztes, Z.; Mészáros, G.; Márton, G. EEG sensor system development consisting of solid polyvinyl alcohol–glycerol–NaCl contact gel and 3D-printed, silver-coated polylactic acid electrode for potential brain–computer interface use. Mater. Today Chem. 2022, 26, 101085. [Google Scholar] [CrossRef]
- Sommariva, S.; Romoli, G.; Vallarino, E.; Di Fino, L.; Sorrentino, A.; Amantini, G.S.; Sannita, W.G.; Piana, M.; Narici, L. EEG in extreme conditions: An advanced analysis pipeline for the human electroencephalographic signals recorded in space during the ALTEA experiment. Life Sci. Space Res. 2023, 36, 39–46. [Google Scholar] [CrossRef] [PubMed]
- Leal-Junior, A.G.; Vargas-Valencia, L.; dos Santos, W.M.; Schneider, F.B.A.; Siqueira, A.A.G.; Pontes, M.J.; Frizera, A. POF-IMU sensor system: A fusion between inertial measurement units and POF sensors for low-cost and highly reliable systems. Opt. Fiber Technol. 2018, 43, 82–89. [Google Scholar] [CrossRef]
- Roger, N. Encyclopedia of Biomedical Engineering; Elsevier: Amsterdam, The Netherlands, 2019; ISBN 978-0-12-805144-3. [Google Scholar]
- Jeong, M.; Woo, H.; Kong, K. A Study on Weight Support and Balance Control Method for Assisting Squat Movement with a Wearable Robot, Angel-suit. Int. J. Control Autom. Syst. 2020, 18, 114–123. [Google Scholar] [CrossRef]
- Zhang, T.; Tran, M.; Huang, H. Design and Experimental Verification of Hip Exoskeleton With Balance Capacities for Walking Assistance. IEEE ASME Trans. Mechatron. 2018, 23, 274–285. [Google Scholar] [CrossRef]
- Taherifar, A.; Vossoughi, G.; Ghafari, A.S. Assistive-compliant control of wearable robots for partially disabled individuals. Control Eng. Pract. 2018, 74, 177–190. [Google Scholar] [CrossRef]
- Bingjing, G.; Jianhai, H.; Xiangpan, L.; Lin, Y. Human–robot interactive control based on reinforcement learning for gait rehabilitation training robot. Int. J. Adv. Robot. Syst. 2019, 16, 172988141983958. [Google Scholar] [CrossRef]
- Aguirre-Ollinger, G.; Yu, H. Lower-Limb Exoskeleton With Variable-Structure Series Elastic Actuators: Phase-Synchronized Force Control for Gait Asymmetry Correction. IEEE Trans. Robot. 2021, 37, 763–779. [Google Scholar] [CrossRef]
- Chen, B.; Zheng, E.; Wang, Q.; Wang, L. A new strategy for parameter optimization to improve phase-dependent locomotion mode recognition. Neurocomputing 2015, 149, 585–593. [Google Scholar] [CrossRef]
- Gasparri, G.M.; Luque, J.; Lerner, Z.F. Proportional Joint-Moment Control for Instantaneously Adaptive Ankle Exoskeleton Assistance. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 751–759. [Google Scholar] [CrossRef]
- Kim, J.-Y.; Cho, B.-K. Development of a Lower Limb Exoskeleton Worn on the Front of a Human. J. Intell. Robot. Syst. 2019, 96, 49–64. [Google Scholar] [CrossRef]
- Park, J.; Park, S.; Kim, C.; Park, J.H.; Choi, J. Design and Control of a Powered Lower Limb Orthosis Using a Cable-Differential Mechanism, COWALK-Mobile 2. IEEE Access 2021, 9, 43775–43784. [Google Scholar] [CrossRef]
- Huang, R.; Cheng, H.; Guo, H.; Lin, X.; Zhang, J. Hierarchical learning control with physical human-exoskeleton interaction. Inf. Sci. 2018, 432, 584–595. [Google Scholar] [CrossRef]
- Shi, D.; Zhang, W.; Zhang, W.; Ju, L.; Ding, X. Human-centred adaptive control of lower limb rehabilitation robot based on human–robot interaction dynamic model. Mech. Mach. Theory 2021, 162, 104340. [Google Scholar] [CrossRef]
- Hwang, S.H.; Lee, S.C.; Shin, D.B.; Baek, I.H.; Kim, M.J.; Sun, D.I.; Kim, B.S.; Hwang, S.W.; Han, C.S. Intuitive Gait Pattern Generation for an Exoskeleton Robot. Int. J. Precis. Eng. Manuf. 2019, 20, 1905–1913. [Google Scholar] [CrossRef]
- Martinez-Hernandez, U.; Awad, M.I.; Dehghani-Sanij, A.A. Learning architecture for the recognition of walking and prediction of gait period using wearable sensors. Neurocomputing 2022, 470, 1–10. [Google Scholar] [CrossRef]
- Wang, B.; Liang, Y.; Xu, D.; Wang, Z.; Ji, J. Design on electrohydraulic servo driving system with walking assisting control for lower limb exoskeleton robot. Int. J. Adv. Robot. Syst. 2021, 18, 172988142199228. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.; Chen, C.; Wang, W.; He, L.; Mao, X.; Xu, G.; Zhao, G.; Li, X.; Dong, W. Development and analysis of an electrically actuated lower extremity assistive exoskeleton. J. Bionic Eng. 2017, 14, 272–283. [Google Scholar] [CrossRef]
- Urendes, E.; Asín-Prieto, G.; Ceres, R.; García-Carmona, R.; Raya, R.; Pons, J.L. HYBRID: Ambulatory Robotic Gait Trainer with Movement Induction and Partial Weight Support. Sensors 2019, 19, 4773. [Google Scholar] [CrossRef]
- Cestari, M.; Sanz-Merodio, D.; Arevalo, J.C.; Garcia, E. An Adjustable Compliant Joint for Lower-Limb Exoskeletons. IEEE ASME Trans. Mechatron. 2015, 20, 889–898. [Google Scholar] [CrossRef]
- Li, Z.; Li, X.; Li, Q.; Su, H.; Kan, Z.; He, W. Human-in-the-Loop Control of Soft Exosuits Using Impedance Learning on Different Terrains. IEEE Trans. Robot. 2022, 38, 2979–2993. [Google Scholar] [CrossRef]
- Ashmi, M.; Akhil, V. A Control Strategy for Pneumatically Powered Below-Hip Orthosis. IRBM 2023, 44, 100791. [Google Scholar] [CrossRef]
- Zhong, B.; Shen, M.; Liu, H.; Zhao, Y.; Qian, Q.; Wang, W.; Yu, H.; Zhang, M. A Cable-Driven Exoskeleton With Personalized Assistance Improves the Gait Metrics of People in Subacute Stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 2560–2569. [Google Scholar] [CrossRef] [PubMed]
- Templeman, J.O.; Sheil, B.B.; Sun, T. Multi-axis force sensors: A state-of-the-art review. Sens. Actuators Phys. 2020, 304, 111772. [Google Scholar] [CrossRef]
- Chao, L.-P.; Chen, K.-T. Shape optimal design and force sensitivity evaluation of six-axis force sensors. Sens. Actuators Phys. 1997, 63, 105–112. [Google Scholar] [CrossRef]
- Ahn, B.; Lee, H.; Kim, Y.; Kim, J. Robotic system with sweeping palpation and needle biopsy for prostate cancer diagnosis. Int. J. Med. Robot. 2014, 10, 356–367. [Google Scholar] [CrossRef] [PubMed]
- Ban, K.; Lim, Y.; Jung, E.S.; Choe, J.; Lee, S.; Park, K. 1G-32 Investigation of Operating Forces of the Automotive Tactile Switch regarding Various Positions. Jpn. J. Ergon. 2013, 49, S544–S547. [Google Scholar] [CrossRef]
- Krafft, M.; Kullgren, A.; Lie, A.; Tingvall, C. The Use of Seat Belts in Cars with Smart Seat Belt Reminders—Results of an Observational Study. Traffic Inj. Prev. 2006, 7, 125–129. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, A.I.A.; Hong, C.; Zhang, L.; Omer, M.; Lin, X. On-line Walking Speed Control in Human-Powered Exoskeleton Systems Based on Dual Reaction Force Sensors. J. Intell. Robot. Syst. 2017, 87, 59–80. [Google Scholar] [CrossRef]
- Li, Y.; Shi, L.; Cheng, Y.; Wang, R.; Sun, J. Development of conductive materials and conductive networks for flexible force sensors. Chem. Eng. J. 2023, 455, 140763. [Google Scholar] [CrossRef]
- Ouyang, X.; Ding, S.; Fan, B.; Li, P.Y.; Yang, H. Development of a novel compact hydraulic power unit for the exoskeleton robot. Mechatronics 2016, 38, 68–75. [Google Scholar] [CrossRef]
- Qi, Y.; El-Kaliouby, H.; Revil, A.; Soueid Ahmed, A.; Ghorbani, A.; Li, J. Three-dimensional modeling of frequency- and time-domain electromagnetic methods with induced polarization effects. Comput. Geosci. 2019, 124, 85–92. [Google Scholar] [CrossRef]
- Wu, Z.; Liu, W.; He, M.; Jiang, D. Coupling displacement sensors with energy harvesting: A study of wireless self-powered displacement detection methods. Energy Rep. 2022, 8, 1471–1482. [Google Scholar] [CrossRef]
- Wang, X.; Guo, S.; Qu, H.; Song, M. Design of a Purely Mechanical Sensor-Controller Integrated System for Walking Assistance on an Ankle-Foot Exoskeleton. Sensors 2019, 19, 3196. [Google Scholar] [CrossRef]
- Cortés, C.; Unzueta, L.; de los Reyes-Guzmán, A.; Ruiz, O.E.; Flórez, J. Optical Enhancement of Exoskeleton-Based Estimation of Glenohumeral Angles. Appl. Bionics Biomech. 2016, 2016, e5058171. [Google Scholar] [CrossRef] [PubMed]
- Mir-Nasiri, N.; Jo, H.S. Tactile human interface with weight supporting lower limb exoskeleton. In Proceedings of the 2018 4th International Conference on Control, Automation and Robotics (ICCAR), Auckland, New Zealand, 20–23 April 2018; pp. 131–135. [Google Scholar] [CrossRef]
- Copaci, D.; Martín, F.; Moreno, L.; Blanco, D. SMA Based Elbow Exoskeleton for Rehabilitation Therapy and Patient Evaluation. IEEE Access 2019, 7, 31473–31484. [Google Scholar] [CrossRef]
- Zhu, C.; Luo, L.; Mai, J.; Wang, Q. Recognizing Continuous Multiple Degrees of Freedom Foot Movements With Inertial Sensors. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 431–440. [Google Scholar] [CrossRef] [PubMed]
- Postolache, O.; Hemanth, D.J.; Alexandre, R.; Gupta, D.; Geman, O.; Khanna, A. Remote Monitoring of Physical Rehabilitation of Stroke Patients Using IoT and Virtual Reality. IEEE J. Sel. Areas Commun. 2021, 39, 562–573. [Google Scholar] [CrossRef]
- Münker, T.; Peter, T.J.; Nelles, O. Gray-box identification with regularized FIR models. at-Automatisierungstechnik 2018, 66, 704–713. [Google Scholar] [CrossRef]
- Aguirre-Ollinger, G. Exoskeleton control for lower-extremity assistance based on adaptive frequency oscillators: Adaptation of muscle activation and movement frequency. Proc. Inst. Mech. Eng. 2015, 229, 52–68. [Google Scholar] [CrossRef]
- Hasan, S.K.; Dhingra, A.K. An adaptive controller for human lower extremity exoskeleton robot. Microsyst. Technol. 2021, 27, 2829–2846. [Google Scholar] [CrossRef]
- Hussain, S.; Xie, S.Q.; Jamwal, P.K. Control of a robotic orthosis for gait rehabilitation. Robot. Auton. Syst. 2013, 61, 911–919. [Google Scholar] [CrossRef]
- Zheng, R.; Yu, Z.; Liu, H.; Zhao, Z.; Chen, J.; Jia, L. Sensitivity Adaptation of Lower-Limb Exoskeleton for Human Performance Augmentation Based on Deep Reinforcement Learning. IEEE Access 2023, 11, 36029–36040. [Google Scholar] [CrossRef]
- Zheng, R.; Yu, Z.; Liu, H.; Chen, J.; Zhao, Z.; Jia, L. End-to-End High-Level Control of Lower-Limb Exoskeleton for Human Performance Augmentation Based on Deep Reinforcement Learning. IEEE Access 2023, 11, 102340–102351. [Google Scholar] [CrossRef]
- Bao, X.; Sheng, Z.; Dicianno, B.E.; Sharma, N. A Tube-Based Model Predictive Control Method to Regulate a Knee Joint With Functional Electrical Stimulation and Electric Motor Assist. IEEE Trans. Control Syst. Technol. 2021, 29, 2180–2191. [Google Scholar] [CrossRef] [PubMed]
- Ai, X.; Santamaria, V.; Omofuma, I.; Agrawal, S.K.K. Effects of Boundary-Based Assist-as-Needed Force Field on Lower Limb Muscle Synergies During Standing Posture Training. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 2306–2314. [Google Scholar] [CrossRef] [PubMed]
- Jradi, R.; Rifai, H.; Amirat, Y.; Mohammed, S. Adaptive based Assist-as-needed control strategy for Ankle movement assistance. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; p. 8, ISBN 979-8-3503-2365-8. [Google Scholar] [CrossRef]
- Mefoued, S. A robust adaptive neural control scheme to drive an actuated orthosis for assistance of knee movements. Neurocomputing 2014, 140, 27–40. [Google Scholar] [CrossRef]
- Pan, C.-T.; Chang, C.-C.; Yang, Y.-S.; Yen, C.-K.; Liu, C.-C.; Lee, C.-L.; Shiue, Y.-L. Development a multi-loop modulation method on the servo drives for lower limb rehabilitation exoskeleton. Mechatronics 2020, 68, 102360. [Google Scholar] [CrossRef]
- Narayan, J.; Abbas, M.; Patel, B.; Dwivedy, S.K. Adaptive RBF neural network-computed torque control for a pediatric gait exoskeleton system: An experimental study. Intell. Serv. Robot. 2023, 16, 549–564. [Google Scholar] [CrossRef]
- Kenas, F.; Saadia, N.; Ababou, A.; Ababou, N. Model-free based adaptive finite time control with multilayer perceptron neural network estimation for a 10 DOF lower limb exoskeleton. Int. J. Adapt. Control Signal Process. 2024, 38, 696–730. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.; Cong, L.; Wang, W.; Zhang, Z.; Dong, W. Active disturbance rejection control based human gait tracking for lower extremity rehabilitation exoskeleton. ISA Trans. 2017, 67, 389–397. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author, Year [x] | Sensing/Monitoring Techniques | Analyses and Control Methods | Primary Aims | Major Results and or Limitations |
|---|---|---|---|---|
| Kagirov et al., 2021 [3] | Position sensors and speed and acceleration sensors to control movements EMG sensors to record the work of muscles Telemetry sensors to measure temperature, rotation angles, and the current Voice-recognition technology | 32-bit microcontroller STM32 MCU Intelligent remote-control interface Electric-drives control Walking-pattern control | To propose an intelligent control system with a user interface and walking mode switching for both patients and doctors. | The correctness of modeling and parameter tuning was verified by testing the exoskeleton prototype. The dual-mode control by voice and graphical interface improves the safety and convenience of use. Development of a dynamic model of the human gait process. |
| Chen et al., 2016 [4] | Encoders and potentiometers for receiving force feedback Rotatory potentiometers to measure the joint angle EMG sensors to estimate human intention IMU sensors to measure kinematics | Force-control strategy based on encoders and potentiometers | To design a lightweight, compact device that safely interacts with people and assists patients with gait training. | A new tandem elastic actuator, consisting of a low-stiffness spring and a high-stiffness spring, was developed and experimentally demonstrated to be effective in providing assisted force. Explore more advanced sensing and control methods and develop a new generation of prototypes with more integrated systems. |
| Cardona et al., 2020 [9] | EMG and IMU sensors for biomechanical model | Adaptive PD control | Quantify exercise data for personalized rehabilitation services | Movement data can be simulated by skeletal muscle models and gait improvement programs can be proposed |
| Li et al., 2019 [34] | EMG sensors and EEG sensors for user intention detection Inductive rotary encoders and Hall sensors to measure motor rotation angles On-board extended Kalman Filter based inertial measurement unit to measure angle information | PD controller for trajectory tracking based on hybrid EEG/EMG signals Joint feedback controller | Helping users perform daily motor tasks better. | Propose a control method based on the mixing of EEG and EMG signals from motion images and verify the effectiveness of the controller by designing a stair-climbing gait. Further improve the recognition and control algorithm. |
| Peña et al., 2019 [18] | EMG sensors to measure the activation of the muscles EMG-driven torque-estimation method | Multilayer perceptron neural network Online adaptive impedance controller | To estimate the appropriate torque and optimal impedance control for the user during the wearing of the exoskeleton. | Torque is estimated and optimized using a simplified model with a specific EMG signal, and the experiments show that the use of the EMG signal is very effective for adaptive control strategies. To try out the exoskeleton on patients with limb injuries and to verify its effectiveness. |
| Tu et al., 2022 [35] | IMU sensors to measure the angles Insole-type plantar pressure diaphragm sensors to measure ground reaction force EMG sensors | User intention detection Active height-adjustment control | To protect the user’s body during squatting activities. | The new E-LEG system reduces the user’s muscle activity during squatting and effectively relieves muscle strain. |
| Huang et al., 2019 [36] | EMG sensors placed on the legs and hips Load-cell force sensors for precise data Pedal force sensors to measure the human-pedal interaction forces | Sensor-fusion method PD feedback controller | Helping patients with lower limb movement disorders to perform safe rehabilitation exercises. | Prototype demonstrates the effectiveness of muscle exercise through EMG signals in an experiment. Further confirm the feasibility of the design and procedure, and involve people with different levels of health in the experiment. |
| Choi et al., 2020 [37] | Pressure sensors and resistive force sensors to measure the gait cycle Tensile load cell sensor to measure the output of the pneumatic artificial muscles Surface EMG signals in the experiment process | Pulse-width modulation (PWM) signals ADC function of the microcontroller named STM32F407VG Sliding mode control | To design an ankle-foot orthosis that generates enough assisted force to aid the user’s ankle motion | Using tandem elastic actuators and polylactic acid material to enhance human ankle-joint strength, device performance was tracked and tested Control the balance of the device in any state by controlling the torque, etc. |
| He et al., 2019 [38] | Flexible piezoresistive force sensors to measure one-dimensional forces Six-axis IMU sensors to detect the movement Encoder and torque sensors to drive the actuators EEG, EMG sensors for human-robot interaction signals CAN bus EtherCAT system | STM32F103 microprocessor Bipedal walking algorithms Self-balanced walking algorithms on flat terrain | To propose an anthropomorphic exoskeleton design and control. | A supervised algorithm was developed to detect synchronized movements of the user and the exoskeleton, and a significant reduction in muscle activity was measured. Improve the detection accuracy of the filter and try other methods to provide assisted force to the user. |
| Hassani et al., 2014 [39] | EMG sensors to measure the muscular activities incremental encoders to measure the joint angles | The Dspace DS1103 controller board and the Maxon motion controller EPOS 70/10 Phase-adaptive control framework | To propose an interactive method of active and passive limb movements that can achieve repetitive limb movements and intention-driven limb movements, respectively. | Satisfactory results were obtained in many aspects through experiments with healthy people. Propose a control framework that can help users to perform different tasks such as combat and stair climbing. |
| Yi et al., 2022 [40] | Nine-axis IMUs embedded in surface electrodes (Delsys Trigno) to measure the joint angles 8-camera video system to record the 3-D locations EMG sensors to measure the muscle activities | EMG-IMU sensor fusion Ahead-of-time prediction algorithm | To use the latest technology to detect the user’s intention to move and to avoid delays caused by transmission. | The proposed over-the-top continuous prediction method is tested on the knee joint and outperforms the traditional method. The actual usage environment is very diverse and there is a lack of algorithms for different movement patterns. |
| Bayon et al., 2022 [41] | Resistive force sensors insole to measure the ground reaction force EMG sensors to measure muscle surface activities. IMU sensors to estimate body center-of-mass | Balance assistive controller Perturbation detection algorithm | To help users maintain balance when standing or moving. | A collaborative ankle-ankle exoskeleton control strategy is proposed to effectively reduce muscle activity and maintain balance control in the experiment. Extension of the control strategy to multi-joint exoskeleton systems. |
| Jradi et al., 2024 [42] | Three force-sensitive resistor was used to measure the ground reaction force Two EMG sensors and two IMU sensors | An adaptive active disturbance rejection controller | Ankle-foot orthoses are utilized to provide continuous assistance to patients with foot drop while walking and to supplement the user’s muscle strength. | The proposed adaptive active-interference-suppression controller is adaptive with enhanced synchronized motion of the ankle joint. The joint motion may affect the neighboring joint motion, and the effect of the controller will be verified on more clinical patients in the future. |
| Luo et al., 2023 [43] | Load-cell force sensors EMG sensors | DAQ card linked to mini-PC Microprocessor ARM CORTEX-M4 | Human-computer systems trained by simulation to predict user HCI forces. | Proposes decoupled RL-based control, which can be trained in arbitrary situations to avoid discomfort during human-computer interaction. |
| Author, Year [x] | Sensing/Monitoring Techniques | Analyses and Control Methods | Primary Aims | Major Results and or Limitations |
|---|---|---|---|---|
| Zhou et al., 2020 [1] | Ultra-small rotary magnetic encoder sensors Cable-displacement force/torque sensors (MINI 45, ATI) | Assess the gravity compensation by perceived assistance | A passive lower-limb exoskeleton using a spring structure is proposed for assisted walking. | A prototype of the exoskeleton has been built and the results of tests on healthy people have verified the usability of the exoskeleton. Verification of the user’s lumbar force and quantitative evaluation of the EMG signal acquisition. |
| Chen et al., 2016 [4] | Encoders and potentiometers for receiving force feedback Rotatory potentiometers to measure the joint angle EMG sensors to estimate human intention IMU sensors to measure kinematics | Force-control strategy based on encoders and potentiometers | To design a lightweight, compact device that safely interacts with people and assists patients with gait training. | A new tandem elastic actuator, consisting of a low-stiffness spring and a high-stiffness spring, was developed and experimentally demonstrated to be effective in providing assisted force. Explore more advanced sensing and control methods and develop a new generation of prototypes with more integrated systems. |
| Sado et al., 2019 [7] | Position sensors to measure the joint angle Resistive force sensors to measure the ground reaction force | Dual extended Kalman filter sensor-less joint torque estimation Linear quadratic Gaussian torque amplification controller Supervisory controller | To propose an anthropomorphic exoskeleton design and control. | A supervised algorithm was developed to detect synchronized movements of the user and the exoskeleton, and a significant reduction in muscle activity was measured. Improve the detection accuracy of the filter and try other methods to provide assisted force to the user. |
| Cardona et al., 2020 [9] | EMG sensors and IMU sensors for biomechanical model | Adaptive PD-control strategy EPOS2 70/10 digital position controller | To quantify patients’ exercise data and provide personalized rehabilitation services. | Patients’ movement data can be simulated by human skeletal muscle models and gait improvement programs can be proposed. Assemble and fabricate the exoskeleton prototype, and verify the stability and feasibility of the prototype with engineering knowledge. |
| Han et al., 2020 [12] | Force sensors to measure interaction force and foot pressure Maxon Encoder (Mile 1024 CPT) to measure the angle position and velocity | A linear discrete-time extended state observer based intelligent-PD controller | A novel tracking differential controller is designed and a hyperlocal model is used to obtain real-time velocity and acceleration. | Experimental and simulation validation methods are used to verify the higher performance of the controller, motor, and other hardware devices. |
| Huo et al., 2018 [25] | Resistive force sensors to measure the ground reaction force IMU sensors to obtain the orientation rotation matrix | Sensor fusion with Kalman Filter Gait-mode-detection-based torque assistive controller | To propose a sensor-based approach for fast gait detection. | Real-time gait estimation using fuzzy logic algorithms allows the selection of the appropriate kinetic and kinematic model for each gait, but currently it is still not applicable to walking at too low a speed. Personalized and customized assist algorithm, trying to increase the output power to achieve higher assist ratio. |
| Arnez-Paniagua et al., 2019 [26] | IMU sensors to measure the acceleration Incremental encoders to measure the joint angle Resistive force sensors to measure the ground reaction force | Gait-cycle detection Gait-sub-phases detection by a Mamdani fuzzy inference system Adaptive ankle reference generator algorithm | To control orthotics to help patients with gait impairment to walk normally. | A model-based control method is proposed for the control of dorsiflexion and supination movements of the ankle joint. |
| Li et al., 2017 [27] | Force sensors (ATI) to measure the ground reaction force Rotary encoders to measure the spring displacement Rotary potentiometers to measure the joint angle | The Dspace control system Multi-modal control scheme (consists of three control modes: robot-assisted, robot-dominant, and safety-stop mode) | Addressing instability of use due to nonlinear factors. | A control scheme combining three modes is proposed to achieve on-demand assistance, corrective motion, and stop motion in different ranges, respectively. Do more experiments in clinical and rehabilitation areas. |
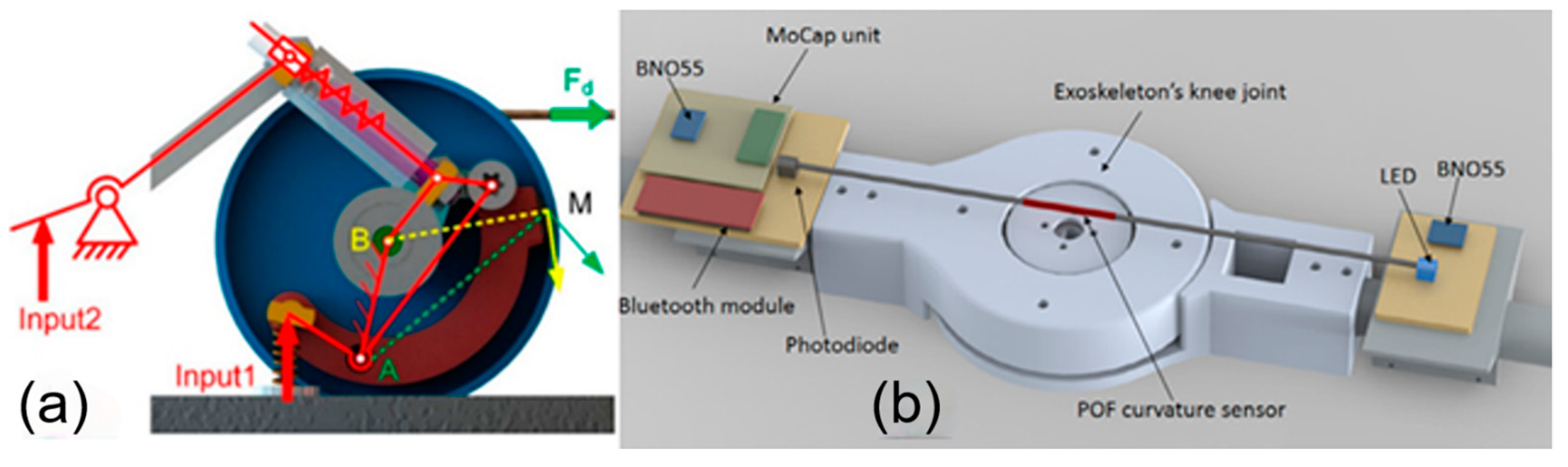
| Leal-Junior et al., 2018 [46] | IMU sensors Polymer optical fiber (POF) curvature sensors (a kind of displacement sensor) Hysteresis compensation technique | Tree analysis of current problems Sensor-fusion algorithms Verification of algorithm validity using root-mean-square error | Breaking through the strain limit and fracture toughness of ordinary curvature sensors, the softness of fibers is similar in order of magnitude to that of the human body. | Fusing two sensors to complement each other’s defects and improve the measurement accuracy of the sensors compared to not using an exoskeleton. To make a basis for future research on sensor-fusion methods and to replace other traditional sensors with lower costs. |
| Jeong et al., 2020 [48] | Air pressure sensors embedded in the shoes EMG sensors for muscle surface activities IMU sensors for inclination angles | Feedback controller Feedforward controller Weight support and balance control method | Maintains better stability during user movement and provides partial weight support. | A new control method using air-pressure sensors to detect the user’s center of gravity in real time is proposed, assorting a series of elastic actuators to generate corresponding auxiliary torque. Weakened signals measured by EMG sensors verify the effectiveness of the device on assist the human body. The experiment should be extended to more people and observe the changes in their other physical indicators. |
| Zhang et al., 2018 [49] | Absolute position magnetic encoders (MBA8) to measure joint angles Torque sensors to measure the interaction torque IMU sensors (VN-100S) to estimate the extrapolated center of mass Resistive pressure sensors (FSR 402) to detect the ground contact | Admittance-based controller Balance controller | To develop an active compliant exoskeleton for the hip joint that can assist users in multiple planes of motion. | The proposed balance control strategy generates enough guiding forces. Preliminary tests on healthy subjects demonstrated the effectiveness. Expand the subject population to make it effective in clinical and geriatric populations, as well as consider balance problems under other perturbations. |
| Taherifar et al., 2018 [50] | Single-axis tension-compression force sensors to measure the interaction forces Angular position sensors to measure the position errors | Assist-as-needed controller based on the impedance control Human swing leg control | To design an exoskeletal rehabilitation system that provides assistance as needed. Based on the target impedance gain and feedforward force, a parameter was set to assist in determining whether assistance is needed. | The system was able to steadily reduce the force during human-machine interaction, and the use of a tandem elastic actuator was shown to contribute to impedance control. |
| Bingjing et al., 2019 [51] | Linear potentiometer sensors to measure the joint angles Resistive force sensors to measure the human-robot interaction force | Position controller Reinforcement-learning interactive controller Velocity feedforward algorithm Gravity compensator | To propose a new human-machine interaction control strategy to ensure gait tracking accuracy. | An adaptive control strategy based on sigmoid functions and reinforcement learning algorithms, combined with flexible pneumatic actuators, is used to finally verify the effectiveness of the strategy. Implementing active resistance rehabilitation training. |
| Aguirre-Ollinger and Yu, 2020 [52] | Actuator encoders, linear potentiometers, knee joint encoders, and IMUs to measure the kinematic data Rotary encoders to measure the angular positions | Force tracking feedback controller based on the forward-propagating Riccati equation | Increasing user engagement with traditional tandem elastic actuators. | Propose variable structure tandem elastic actuator with adjustable stiffness according to different commands. Interference suppression components are used to increase transparency in the zero-force case, and force control is used to correct partially asymmetric gaits. |
| Chen et al., 2015 [53] | IMU sensors and pressure sensors in both shoes for locomotion mode recognition | Gait-event detection Parameter optimization-based neural-machine-interface control strategy | To propose a better strategy to classify the motion characteristics in different phases and improve the parameters such as feature set and window size. | The inertial and pressure feature sets can be measured through different motion tasks of the subjects, thus providing better recognition performance. To make the system more integrated and to further improve the recognition performance. |
| Gasparri et al., 2019 [54] | High-range force sensors (FlexiForce A201, Tekscan) to measure the ground reaction force Torque sensors to track the instantaneous torque profile | Proportional joint-moment controller 32-bit ARM microprocessor | Assist users in maintaining stability in different sports and improve clinical usability. | The ankle exoskeleton using joint-torque-control strategy is developed, and the control algorithm is also designed to adapt to different motion decisions of users. Evaluate whether the metabolic cost of users is reduced and test it on a larger scale. |
| Peña et al., 2019 [18] | EMG sensors to measure the activation of the muscles EMG-driven torque-estimation method | Multilayer perceptron neural network Online adaptive impedance controller | To estimate the appropriate torque and optimal impedance control for the user during the wearing of the exoskeleton. | Torque is estimated and optimized using a simplified model with a specific EMG signal, and the experiments show that the use of the EMG signal is very effective for adaptive control strategies. To try out the exoskeleton on patients with limb injuries and to verify its effectiveness. |
| Tu et al., 2022 [35] | IMU sensors to measure the angles Insole-type plantar pressure diaphragm sensors to measure ground reaction force EMG sensors | User-intention detection Active height-adjustment control | To protect the user’s body during squatting activities. | The new E-LEG system reduces the user’s muscle activity during squatting and effectively relieves muscle strain. |
| Kim and Cho., 2019 [55] | Six-axis force/torque (FT) sensors to detect user intention CAN bus | Balancing controller z-directional admittance controller vibration reduction algorithm and soft-landing algorithm for swing leg compliant control algorithm for upper body moving stop algorithms for swing leg and upper body | Assist users to complete the sit-to-stand transition. | A new frame is proposed: KUEX, worn on the anterior side of the user, which can effectively reduce the wearing time. There are difficulties in turning movements. |
| Huang et al., 2019 [36] | EMG sensors placed on the legs and hips Load-cell force sensors for precise data Pedal force sensors to measure the human-pedal interaction forces | Sensor-fusion method PD feedback controller | Helping patients with lower-limb movement disorders to perform safe rehabilitation exercises. | Prototype demonstrates the effectiveness of muscle exercise through EMG signals in an experiment. Further confirm the feasibility of the design and procedure, and involve people with different levels of health in the experiment. |
| Li and Hashimoto, 2016 [37] | Resistive strain-gauge force sensors under the feet to detect gait cycles PVC gel soft actuators include a laser displacement sensor (IL-065, Keyence) myRIO (LabVIEW) computer for real-time data acquisition and conversion | Tree analysis of the soft actuator Gait-cycle detection Operation decision control DC field control | To design an advanced, easy-to-wear soft plastic gel actuator to assist users in walking. | The actuator was shown to reduce muscle load and make walking more efficient in life, and to prevent actuator breakage. Research on building an effective control algorithm for this prototype exoskeleton, designing an intelligent battery, and reducing the operating voltage. |
| He et al., 2019 [38] | Flexible piezoresistive force sensors to measure one-dimensional forces Six-axis IMU sensors to detect the movement Encoder and torque sensors to drive the actuators EEG, EMG sensors for human-robot interaction signals CAN bus EtherCAT system | STM32F103 microprocessor Bipedal walking algorithms Self-balanced walking algorithms on flat terrain | To propose an anthropomorphic exoskeleton design and control. | A supervised algorithm was developed to detect synchronized movements of the user and the exoskeleton, and a significant reduction in muscle activity was measured. Improve the detection accuracy of the filter and try other methods to provide assisted force to the user. |
| Bayon et al., 2022 [41] | Resistive force sensors insole to measure the ground reaction force EMG sensors to measure the muscle surface activities IMU sensors to estimate body center-of-mass | Balance assistive controller Perturbation detection algorithm | To help users maintain balance when standing or moving. | A collaborative ankle-ankle exoskeleton control strategy is proposed to effectively reduce muscle activity and maintain balance control in the experiment. Extension of the control strategy to multi-joint exoskeleton systems. |
| Park et al.,2021 [56] | IMU sensors (3DM-GX4-25) to measure the torso orientations Compact torque Sensors (TQ-CSKG02-NM150) to measure joint torques Absolute encoders (RMB28SC) to measure joint angles; multi-turn absolute encoders (EBI1135) to measure the actuator positions. Resistive force sensors to measure the ground reaction forces | Pulley controller using the system dynamics | To reduce the mass and moment of inertia of the exoskeleton to extend the service time. | Propose a cable differential mechanism to provide sufficient torque and speed. To validate the effectiveness of the prototype on patients’ lower limb motor rehabilitation ability and metabolic exertion. |
| Huang et al., 2018 [57] | Encoders to measure the current state of HUALEX system IMU sensors to measure the walking velocity Plantar sensors to judge the current phase | Hierarchical interactive learning controller (motion learning and model-based controller learning) Node controller set nearby each active joint | To propose a control strategy with a hierarchical interaction learning framework that can handle different human-computer interaction movements. | Experimental results show that the control algorithm has more processing power and better performance. An attempt is made to use a soft modelling approach to guide the motion of the exoskeleton with sensitivity coefficients. |
| Shi et al., 2021 [58] | EtherCAT system (Angle sensors to measure the terminal posture, encoder of the motor to measure the speed, IMU sensors to measure the actual hip angle) | Model-based human-centered adaptive controller | To propose a human-centered interaction control method to mitigate the errors caused by band connections. | The adaptive controller is designed based on the dynamic model of human-computer interaction and its effectiveness is verified by simulation. |
| Hwang et al., 2019 [59] | IMU sensors to measure the movement intention Kinect sensors to obtain the joint position Encoder sensors to measure the joint angle | Trajectory tracking control method | Development of exoskeleton devices based on the actual needs of the user such as gait cycle. | The average value of gait data of ordinary people and the data obtained from Kinect sensor predefined the exoskeleton gait and verified the effectiveness of the learning algorithm. |
| Foroutannia et al., 2022 [23] | Resistive force sensors to measure the ground reaction force IMU sensors to measure the speed and body position CAN bus Wet Ag/AgCl electrodes-based EMG sensors to measure the muscle activities Small beam-type load cells to measure the interaction force between the human-robot system | BECKHOFF programmable logic controller | To predict joint positions more accurately. | The effectiveness and stability of the algorithm was experimentally verified using an EMG-based deep learning neural network placed in an impedance control loop. Algorithm fusion strategies should be used to develop more disease-specific controllers. |
| Matinez-Hernandez et al., 2022 [60] | Nine-axis IMU sensors to measure the angular velocity, accelerometer, and magnetometer signals Insole resistive force sensors to detect the gait cycle | Sensor fusion Convolutional Neural Network (CNN) Gait cycle tracking Predicted Information Gain method | To predict gait cycles more accurately and to identify walking activity. | An adaptive strategy combining convolutional neural networks and predictive information gain is proposed and its accuracy is experimentally verified. |
| Wang et al., 2021 [61] | Encoders to measure the piston position in the valve Force sensors to measure the pressure at the outlets of the valve Displacement sensors to measure the real joint angle | Piecewise PID controller | The motion and drive of the exoskeleton are optimized to improve the tracking accuracy and assist performance. | A control method with error estimation and compensation is proposed, and the feasibility is verified by simulation. |
| Long et al., 2017 [62] | Digital pressure sensors to measure the interaction force between ground and exoskeleton Optical encoders to measure the angular position Gasbag-based force sensors to measure the interaction force between human limbs and the exoskeleton limbs CAN bus | Sensor fusion online Walking phase identification Adaptive minimizing pHRI control strategy Static balance control in the stance phase | Improving comfort and reducing energy consumption when wearing an exoskeleton | A sensor-based adaptive control strategy is proposed to continuously keep the human-machine interaction force at a minimum. This strategy can effectively assist walking by verifying the mean-square value of human-machine interaction force and torque force. To Improve applicability for different users. |
| Urendes et al., 2019 [63] | Potentiometer sensors to measure the joint angle Resistive force sensors in each shoe Ultrasound sensors measure the distance for synchro the whole system CAN bus | PWM controller Microcontroller board dsPIC30F4013 Weight support control | Design of a system called HYBRID for monitoring and analyzing user limb movement data. | Incorporating features such as gait guidance and weight support, it uses a newer human-computer interaction solution that eliminates the need for cables and allows for appropriate patient proprioceptive stimulation during movement. |
| Cestari et al., 2015 [64] | Embedded force sensors to detect small torques Industrial CAN-OPEN bus | Maxon EPOS controllers and NI CompacRIO controllers | Reducing the energy requirements of compliant actuators and enhancing adaptability to external disturbances | An adjustable-rigidity and embedded sensor joint prototype for children was designed, and the proposed rigidity-adjustable design combined with different force control strategies can effectively achieve energy savings in the device. |
| Li et al., 2022 [65] | Load cells (LSB201, FUTEK) to measure the tension force Insole resistive force sensors for switching the gait | Adaptive position tracking controller Impedance learning and hierarchical controller | To consider impedance matching and environmental factors while meeting flexibility requirements. | To propose an adaptive control strategy based on impedance learning and considering users. Limitations: Only for a single joint. |
| Ashmi and Akhil, 2023 [66] | Pressure sensors Accelerometer ADXL335 Optical sensor | ATmega328 microcontroller PID controller using particle swarm optimization | This paper notes the importance of controllers and designs suitable controllers for the knee and hip joints of the exoskeleton. | The PID control in this paper exhibits less oscillation and better steady state error compared to other controllers. The global optimum position can be obtained by finding the optimum controller gain constant using particle swarm optimization. |
| Zhong et al., 2023 [67] | Instep-mounted IMUs and encoders EMG sensors | Microcontroller (STM32F407) Upper controller (Raspberry CM4) | Improving personalized gait performance and gait symmetry for stroke patients. | A hybrid cable-actuated exoskeleton was developed and was positively received by patients who used it. The extent of the efficacy of the rehabilitation training remains to be determined, and a larger sample and time will be used in the future. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, Y.; Shao, D.; Tarabini, M.; Moezi, S.A.; Li, K.; Saccomandi, P. Advancements in Sensor Technologies and Control Strategies for Lower-Limb Rehabilitation Exoskeletons: A Comprehensive Review. Micromachines 2024, 15, 489. https://doi.org/10.3390/mi15040489
Yao Y, Shao D, Tarabini M, Moezi SA, Li K, Saccomandi P. Advancements in Sensor Technologies and Control Strategies for Lower-Limb Rehabilitation Exoskeletons: A Comprehensive Review. Micromachines. 2024; 15(4):489. https://doi.org/10.3390/mi15040489
Chicago/Turabian StyleYao, Yumeng, Dongqing Shao, Marco Tarabini, Seyed Alireza Moezi, Kun Li, and Paola Saccomandi. 2024. "Advancements in Sensor Technologies and Control Strategies for Lower-Limb Rehabilitation Exoskeletons: A Comprehensive Review" Micromachines 15, no. 4: 489. https://doi.org/10.3390/mi15040489
APA StyleYao, Y., Shao, D., Tarabini, M., Moezi, S. A., Li, K., & Saccomandi, P. (2024). Advancements in Sensor Technologies and Control Strategies for Lower-Limb Rehabilitation Exoskeletons: A Comprehensive Review. Micromachines, 15(4), 489. https://doi.org/10.3390/mi15040489