Measuring on-Road Vehicle Hot Running NOx Emissions with a Combined Remote Sensing–Dynamometer Study


Abstract
:1. Introduction
2. Methods
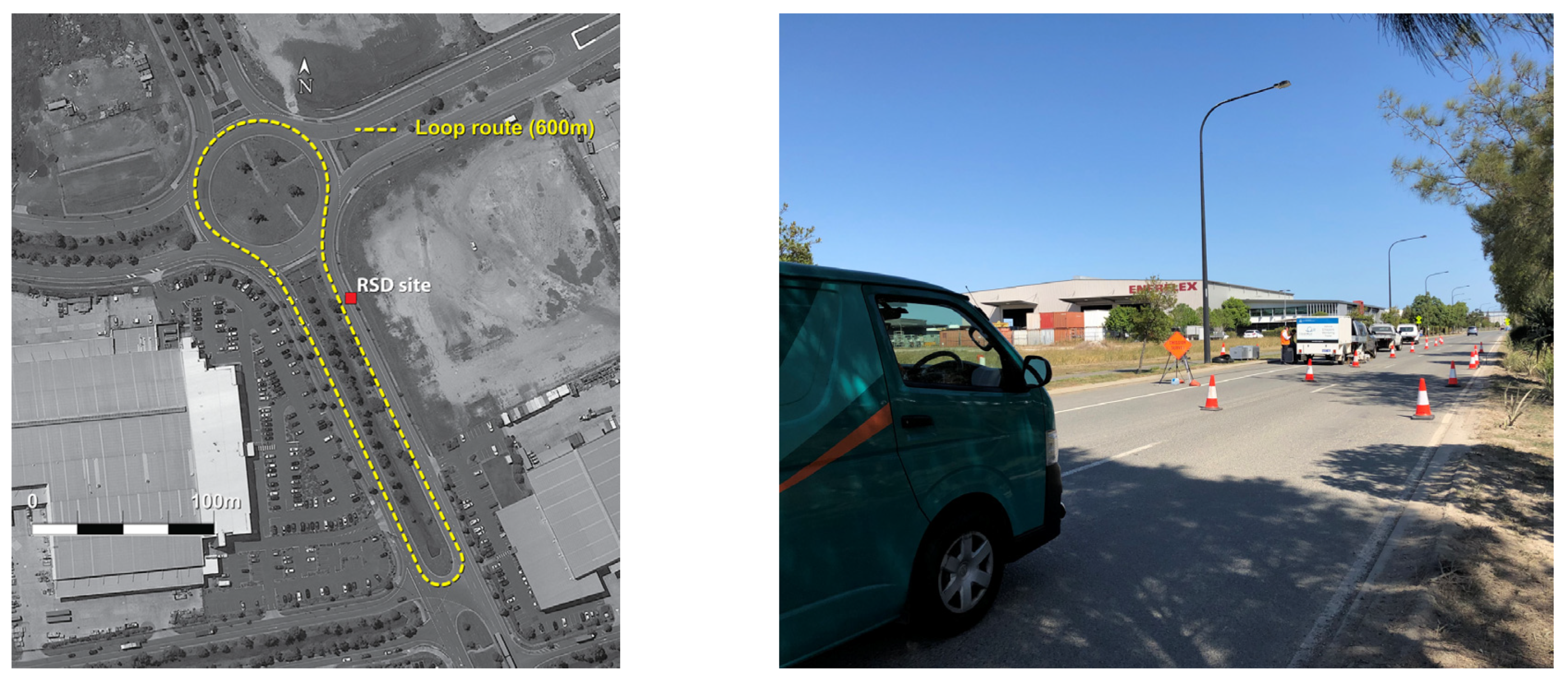
2.1. Site Selection for the Remote Sensing Device
2.2. Dynamometer Instruments and Procedures
2.3. Test Vehicles
2.4. Dynamometer Test Cycle
2.5. Dynamometer Time Alignment
2.6. Power Use by the Air-Conditioning System
2.7. On-Road Instruments and Procedures (RSD)
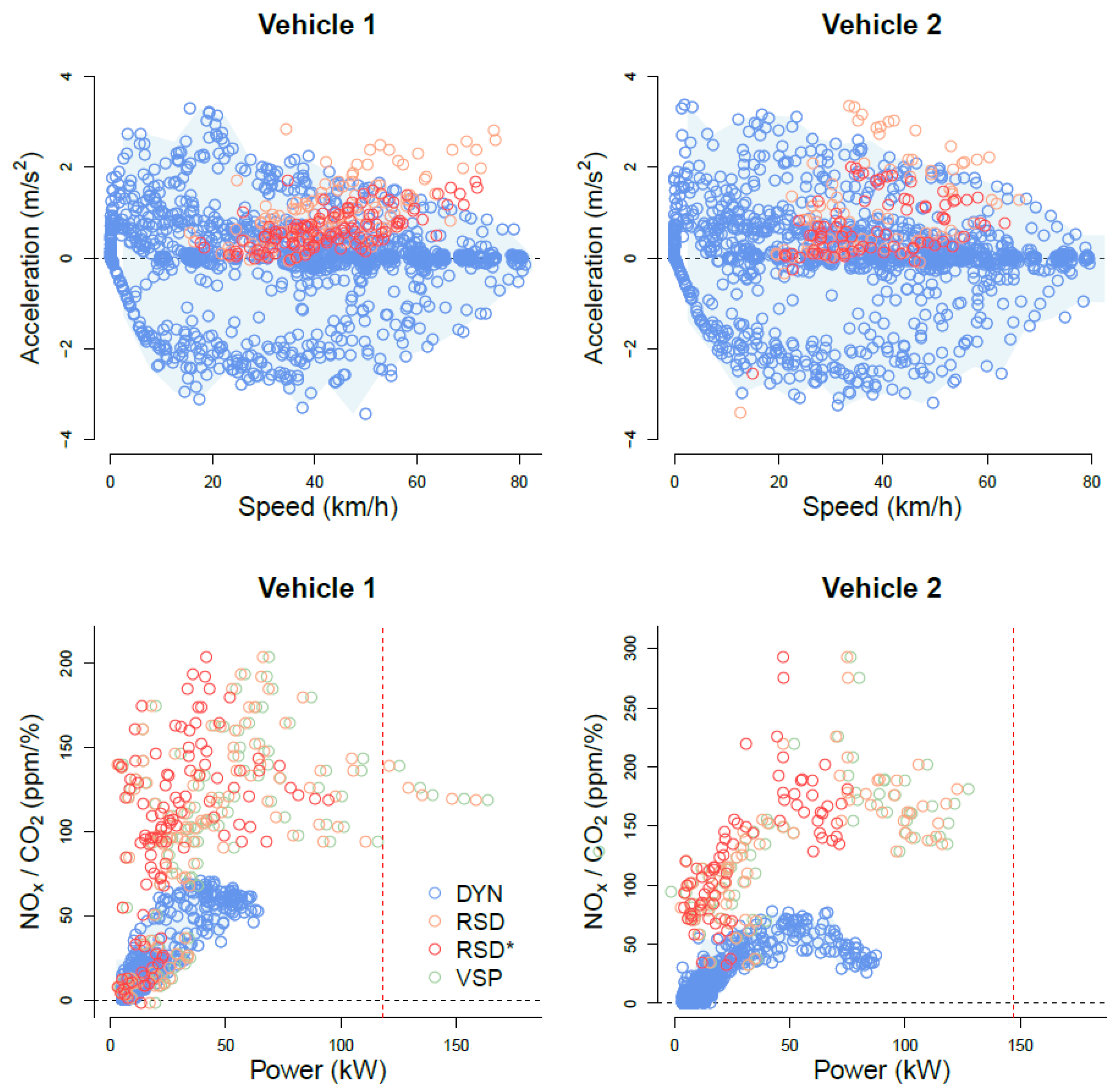
2.8. On-Road Speed and Acceleration Measurement
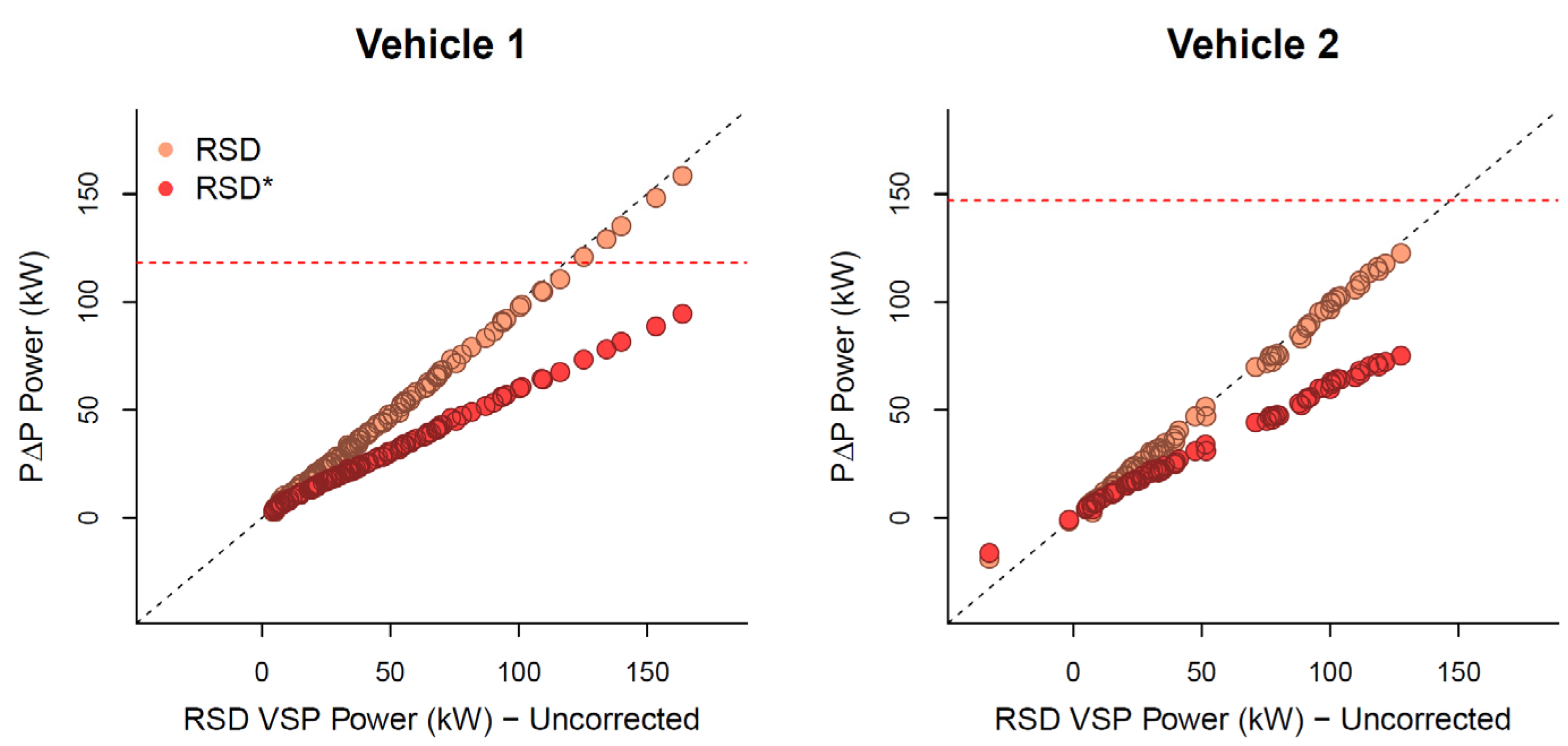
2.9. Engine Power Measurement and Predictions
2.10. RSD NO2 Emission Correction
2.11. Humidity Correction
3. Results and Discussion
3.1. Emission Measurement Results
3.2. RSD–DYNO Correlation and Bias
3.3. Sensitivity Analysis
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Caiazzo, F.; Ashok, A.; Waitz, I.A.; Yim, S.H.L.; Barrett, S.R.H. Air pollution and early deaths in the United States. Part I: Quantifying the impact of major sectors in 2005. Atmos. Environ. 2013, 79, 198–208. [Google Scholar] [CrossRef]
- Smit, R.; Brown, A.L.; Chan, Y.C. Do air pollution emissions and fuel consumption models for roadways include the effects of congestion in the roadway traffic flow? Environ. Model. Softw. 2008, 23, 1262–1270. [Google Scholar] [CrossRef]
- Smit, R.; Ntziachristos, L.; Boulter, P. Validation of road vehicle and traffic emission models—A review and meta-analysis. Atmos. Environ. 2010, 44, 2943–2953. [Google Scholar] [CrossRef]
- Sjödin, Å.; Borken-Kleefeld, J.; Carslaw, D.; Tate, J.; Alt, G.-M.; De la Fuente, J.; Bernard, Y. Comparing Emission Rates Derived from Remote Sensing with PEMS and Chassis Dynamometer Tests—CONOX Task 1 Report; Commissioned by Federal Office for the Environment: Switzerland; IVL Swedish Environmental Research Institute: Stockholm, Sweden, 2018; ISBN 978-91-88787-28-6. [Google Scholar]
- Smit, R.; Somervell, E. The Use of Remote Sensing to Enhance Motor Vehicle Emission Modelling in New Zealand; National Institute of Water & Atmospheric Research: Auckland, New Zealand, 2015. [Google Scholar]
- Smit, R.; Bluett, J. A new method to compare vehicle emissions measured by remote sensing and laboratory testing: High-emitters and potential implications for emission inventories. Sci. Total Environ. 2011, 409, 2626–2634. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Borken-Kleefeld, J. Real-Driving Emissions from Cars and Light Commercial Vehicles—Results from 13 Years Remote Sensing at Zurich/CH. Atmos. Environ. 2014, 88, 157–164. [Google Scholar] [CrossRef]
- Bernard, Y.; Tietge, U.; German, J.; Muncrief, R. Determination of Real-World Emissions from Passenger Vehicles Using Remote Sensing Data. The Real Urban Emissions Initiative (TRUE). 2018. Available online: https://www.trueinitiative.org/data/publications/determination-of-real-world-emissions-from-passenger-vehicles-using-remote-sensing-data (accessed on 15 August 2019).
- Smit, R.; Kingston, P.; Neale, D.W.; Brown, M.K.; Verran, B.; Nolan, T. Monitoring on-road air quality and measuring vehicle emissions with remote sensing in an urban area. Atmos. Environ. 2019, 218, 116978. [Google Scholar] [CrossRef]
- Bishop, G.A.; Starkey, J.R.; Ihlenfeldt, A.; Williams, W.J.; Stedman, D.H. IR long-path photometry: A remote sensing tool for automobile emissions. Anal. Chem. 1989, 61, 671–677. [Google Scholar] [CrossRef]
- Sjödin, Å.; Andréasson, K.; Wallin, M.; Lenner, M.; Wilhelmsson, H. Identification of high-emitting catalyst cars on the road by means of remote sensing. Int. J. Veh. Des. 1997, 18, 326–339. [Google Scholar]
- TRL. The Inspection of In-Use Cars in Order to Attain Minimum Emissions of Pollutants and Optimum Energy Efficiency—Remote Sensing; TRL: Crowthorne, UK, 1998. [Google Scholar]
- Pokharel, S.S.; Stedman, D.H.; Bishop, G.A. RSD Versus IM240 Fleet Average Correlations. In Proceedings of the 10th CRC On-Road Vehicle Emissions Workshop, San Diego, CA, USA, 27–29 March 2000. [Google Scholar]
- Yanowitz, J.; McCormick, R.L.; Graboski, M.S. In-use emissions from heavy-duty diesel vehicles. Environ. Sci. Technol. 2000, 34, 729–740. [Google Scholar] [CrossRef] [Green Version]
- Elder, S.; Graham, M.; Jones, K.; Raine, R. Vehicle Emissions Remote Sensing Campaign: Control Vehicle Study; UniServices Report 30793.001; University of Auckland: Auckland, New Zealand, 2011. [Google Scholar]
- Mazzoleni, C.; Moosmüller, H.; Kuhns, H.D.; Keislar, R.E.; Barber, P.W.; Nikolic, D.; Nussbaum, N.J.; Watson, J.G. Correlation between automotive CO, HC, NO, and PM emission factors from on-road remote sensing: Implications for Inspection and Maintenance Programs. Transp. Res. Part D Transp. Environ. 2004, 9, 477–496. [Google Scholar] [CrossRef]
- Rhys-Tyler, G.A.; Bell, M.C. Toward reconciling instantenous roadside measurements of light-duty vehicle exhaust emissions with type approval drive cycles. Environ. Sci. Technol. 2012, 46, 10532–10538. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Smit, R.; Kingston, P. Detecting cold start vehicles in the on-road fleet. Air Qual. Clim. Chang. 2019, 53, 22–26. [Google Scholar]
- Smit, R.; Kingston, P. Measuring on-road vehicle emissions with multiple instruments including remote sensing. Atmosphere 2019, 10, 516. [Google Scholar] [CrossRef] [Green Version]
- Smit, R. Development and performance of a new vehicle emissions and fuel consumption software (PΔP) with a high resolution in time and space. Atmos. Pollut. Res. 2013, 4, 336–345. [Google Scholar] [CrossRef] [Green Version]
- Smit, R. PΔP: A simulation tool for vehicle emissions and fuel consumption software with a high resolution in time and space. Veh. Technol. Eng. 2014, 2014, 17–21. [Google Scholar]
- Kent, J.H.; Allen, G.H.; Rule, G. A driving cycle for Sydney. Transp. Res. 1978, 12, 147–152. [Google Scholar] [CrossRef]
- Watson, H.C.; Milkins, E.E.; Braunsteins, J. The development of the Melbourne Peak Cycle. In Proceedings of the SAE-A/ARRB 2nd Conference on Traffic Energy and Emissions, Melbourne, Australia, 19–20 May 1982. [Google Scholar]
- DTRS. Comparative Vehicle Emissions Study; Commonwealth Department of Transport and Regional Services: Canberra, Australia, 2001; ISBN 0 642 45684 4. [Google Scholar]
- Orbital. NISE 2—Contract 2 Drive Cycle and Short Test Development; Orbital Australia Pty Ltd.: Balcatta, Australia, 2005. [Google Scholar]
- Wong, C.K.L.; Lo, T.S.; Wong, H.L.A.; Lam, K.L.; Frey, H.C.; Smit, R.; Hausberger, S.; Weller, K.; Ntziachristos, L. Microscale Vehicle Emission Modelling in Hong Kong. In Proceedings of the 23rd Transport and Air Pollution Conference 2019, Thessaloniki, Greece, 15–17 May 2019. [Google Scholar]
- Atjay, D.; Weilenmann, M.; Soltic, P. Towards accurate instantaneous emission models. Atmos. Environ. 2015, 39, 2443–2449. [Google Scholar]
- Efron, B. Bootstrap methods: Another look at the jackknife. Ann. Stat. 1979, 7, 1–26. [Google Scholar] [CrossRef]
- ESP. RSD4600 NextGen Operator’s Manual, 2nd ed.; Environmental Systems Products Holdings Inc.: Tucson, AZ, USA, 2006. [Google Scholar]
- Kuhns, H.D.; Mazzoleni, C.; Moosmuller, H.; Nikolic, D.; Keislar, R.E.; Barber, P.W.; Li, Z.; Etyemezian, V.; Watson, J.G. Remote sensing of PM, NO, CO and HC emission factors for on-road gasoline and diesel engine vehicles in Las Vegas, NV. Sci. Total Environ. 2004, 322, 123–137. [Google Scholar] [CrossRef]
- Smit, R.; Kingston, P.; Wainwright, D.; Tooker, R. A tunnel study to validate motor vehicle emission prediction software in Australia. Atmos. Environ. 2017, 151, 188–199. [Google Scholar] [CrossRef] [Green Version]
- Quaassdorff, C.; Smit, R.; Borge, R.; Hickman, M. Comparison of Microscale Traffic Emision Models for Urban Networks. In Proceedings of the CASANZ 2017 Conference, Brisbane, Australia, 15–18 October 2017. [Google Scholar]
- Carslaw, D.C.; Murrells, T.P.; Andersson, J.; Keenan, M. Have vehicle emissions of primary NO2 peaked? Faraday Discuss 2016, 189, 439–454. [Google Scholar] [CrossRef] [PubMed]
- Jimenez-Palacios, J.C. Understanding and Quantifying Motor Vehicle Emissions with Vehicle Specific Power and TILDAS Remote Sensing. Ph.D. Thesis, Department of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge, MA, USA, February 1999. [Google Scholar]
- Carlsaw, D.C.; Rhys-Tyler, G. Remote Sensing of NO2 Exhaust Emissions from Road Vehicles; DEFRA Project Reference: 332c2011 (City of London Corporation); 334c2011 (London Borough of Ealing); City of London Corporation: London, UK, 16 July 2013. [Google Scholar]
- Moody, A.; Tate, J. In service CO2 and NOx emissions of Euro 6/VI cars, light- and heavy-duty goods vehicles in real London driving: Taking the road into the laboratory. J. Earth Sci. Geotech. Eng. 2017, 7, 51–62. [Google Scholar]
- Pekula, N.; Kuritz, B.; Hearne, J.; Marchese, A.J.; Hesketh, R.P. The Effect of Ambient Temperature, Humidity, and Engine Speed on Idling Emissions from Heavy-Duty Diesel Trucks. SAE Tech. Pap. Ser. 2003, 112, 148–158. [Google Scholar]
- Burgard, D.A.; Bishop, G.A.; Stedman, D.H.; Gessner, V.H.; Daeschlein, C. Remote sensing of in-use heavy-duty diesel trucks. Environ. Sci. Technol. 2006, 40, 6938–6942. [Google Scholar] [CrossRef] [PubMed]
- Bishop, G.A.; Morris, J.A.; Stedman, D.H.; Cohen, L.H.; Countess, R.J.; Countess, S.J.; Maly, P.; Scherer, S. The effect of altitude on heavy-duty diesel truck on-road emissions. Environ. Sci. Technol. 2001, 35, 1574–1578. [Google Scholar] [CrossRef]
- Lindhjem, C.; Chan, L.; Pollack, A.; Kite, C. Applying Humidity and Temperature Corrections to on and Off-Road Mobile Source Emissions. In Proceedings of the EPA 13th International Emission Inventory Conference: Working for Clean Air in Clearwater, Clearwater, FL, USA, 8–10 June 2004. [Google Scholar]
- Horiba, Introduction to HORIBA “On Board” System for PEMS Project. December 2014. Available online: https://circabc.europa.eu/webdav/CircaBC/GROW/pems/Library/pems_meetings_2004-2005/brussels_13-14th/P2_HORIBA_OBS_PEMS_13-12-04.pdf (accessed on 15 August 2019).
- Stephens, R.D.; Cadle, S.H. Remote sensing measurements of carbon monoxide emissions from on-road vehicles. J. Air Waste Manag. Assoc. 1991, 41, 39–46. [Google Scholar] [CrossRef]
- Bishop, G.A.; Stedman, D.H. Measuring the emissions of passing cars. Acc. Chem. Res. 1996, 29, 489–495. [Google Scholar] [CrossRef]
- Kraan, T.C.; Baarbe, H.L.; Eijk, A.R.A.; Stelwagen, U.; Vonk, W.A. Consistency Tests of Remote Sensing for Vehicle Exhaust Emissions. In Proceedings of the 19th Transport and Air Pollution Conference, Thessaloniki, Greece, 26–27 November 2012. [Google Scholar]
- Tellinghuisen, J. Least-squares analysis of data with uncertainty in X and Y: A Monte Carlo methods comparison. Chemom. Intell. Lab. Syst. 2010, 103, 160–169. [Google Scholar] [CrossRef]
- Revelle, W. Psych: Procedures for Personality and Psychological Research, version 1.8.12; North Western University: Evanston, IL, USA, 2018. [Google Scholar]
- Saltelli, A.; Chan, K.; Scott, E.M. Sensitivity Analysis; John Wiley & Sons Ltd.: Chichester, UK, 2000. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameter/Test Variable | Vehicle 1 | Vehicle 2 |
|---|---|---|
| Model/Make | Ford Ranger | Ford Ranger |
| Model year | 2016 | 2017 |
| Emission standard | Euro 4 | Euro 5 |
| Engine capacity (litres) | 2.2 | 3.2 |
| Emission control technology | DOC, EGR | DOC, EGR, DPF |
| Tare weight (kg) | 1938 | 2135 |
| Test weight (kg) | 2240 | 2700 |
| Vehicle loading (%) | 60% | 53% |
| Gross vehicle weight (kg) | 3200 | 3200 |
| Rated engine power (kW) | 118 | 147 |
| CdA (m2) * | 0.72 | 0.70 |
| RSD test cycle average speed (km/h) | 30 | 29 |
| RSD test cycle average NOx emission factor (g/km) | 1.1 | 1.3 |
| RSD test cycle average CO2 emission factor (g/km) | 458 | 506 |
| Scenario Description | Scenario Definition | Vehicle 1 | Vehicle 2 |
|---|---|---|---|
| Base case | fNO2 (Veh 1) = 0, fNO2 (Veh 2) = 0 | 0.89 | 0.95 |
| RSD acceleration = adjusted | |||
| RSD power definition = PΔP engine power | |||
| Power bin increment = 5 kW | |||
| Humidity correction = excluded | |||
| Original RSD | Base case, but RSD acceleration = original | 0.83 | 0.62 |
| Original RSD VSP | Base case, but RSD VSP = original | 0.73 | 0.64 |
| Minimum power bin | Base case, but Power bin increment = 1 kW | 0.39 | 0.85 |
| Maximum power bin | Base case, but Power bin increment = 10 kW | 0.93 | 0.94 |
| Minimum fNO2 | Base case, but fNO2 (Vehicle 1/2) = 0.28/0.25 | 0.88 | 0.95 |
| Maximum fNO2 | Base case, but fNO2 (Vehicle 1/2) = 0.77/0.70 | 0.88 | 0.94 |
| Humidity correction | Base case, but humidity correction applied | 0.89 | 0.94 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Smit, R.; Kennedy, D. Measuring on-Road Vehicle Hot Running NOx Emissions with a Combined Remote Sensing–Dynamometer Study. Atmosphere 2020, 11, 294. https://doi.org/10.3390/atmos11030294
Smit R, Kennedy D. Measuring on-Road Vehicle Hot Running NOx Emissions with a Combined Remote Sensing–Dynamometer Study. Atmosphere. 2020; 11(3):294. https://doi.org/10.3390/atmos11030294
Chicago/Turabian StyleSmit, Robin, and Daniel Kennedy. 2020. "Measuring on-Road Vehicle Hot Running NOx Emissions with a Combined Remote Sensing–Dynamometer Study" Atmosphere 11, no. 3: 294. https://doi.org/10.3390/atmos11030294
APA StyleSmit, R., & Kennedy, D. (2020). Measuring on-Road Vehicle Hot Running NOx Emissions with a Combined Remote Sensing–Dynamometer Study. Atmosphere, 11(3), 294. https://doi.org/10.3390/atmos11030294