

Protection and Fault Isolation Scheme for DC Distribution Network Based on Active Current-Limiting Control

Abstract
:1. Introduction
2. DC Distribution Network Equipment
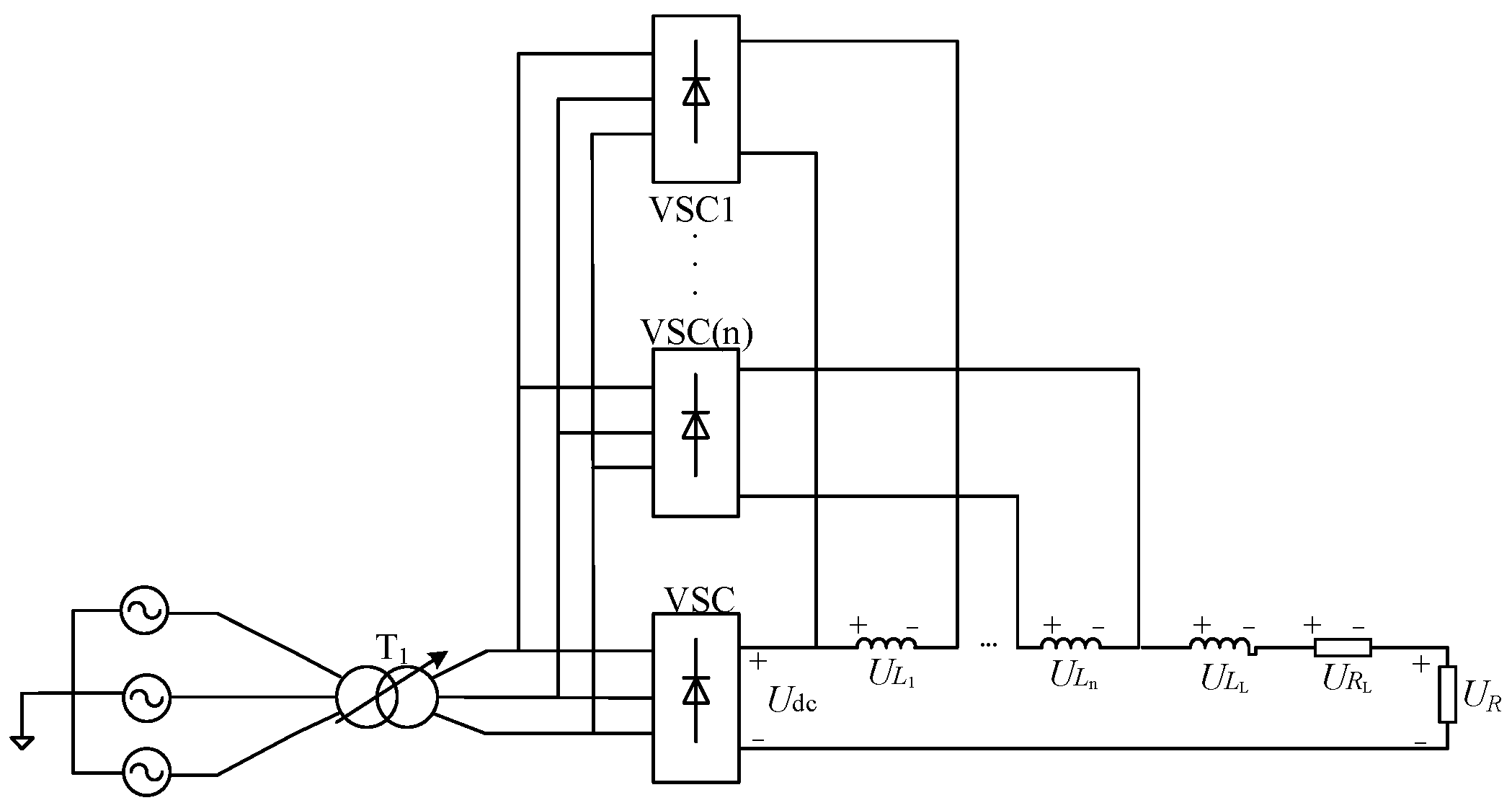
2.1. VSC Converter
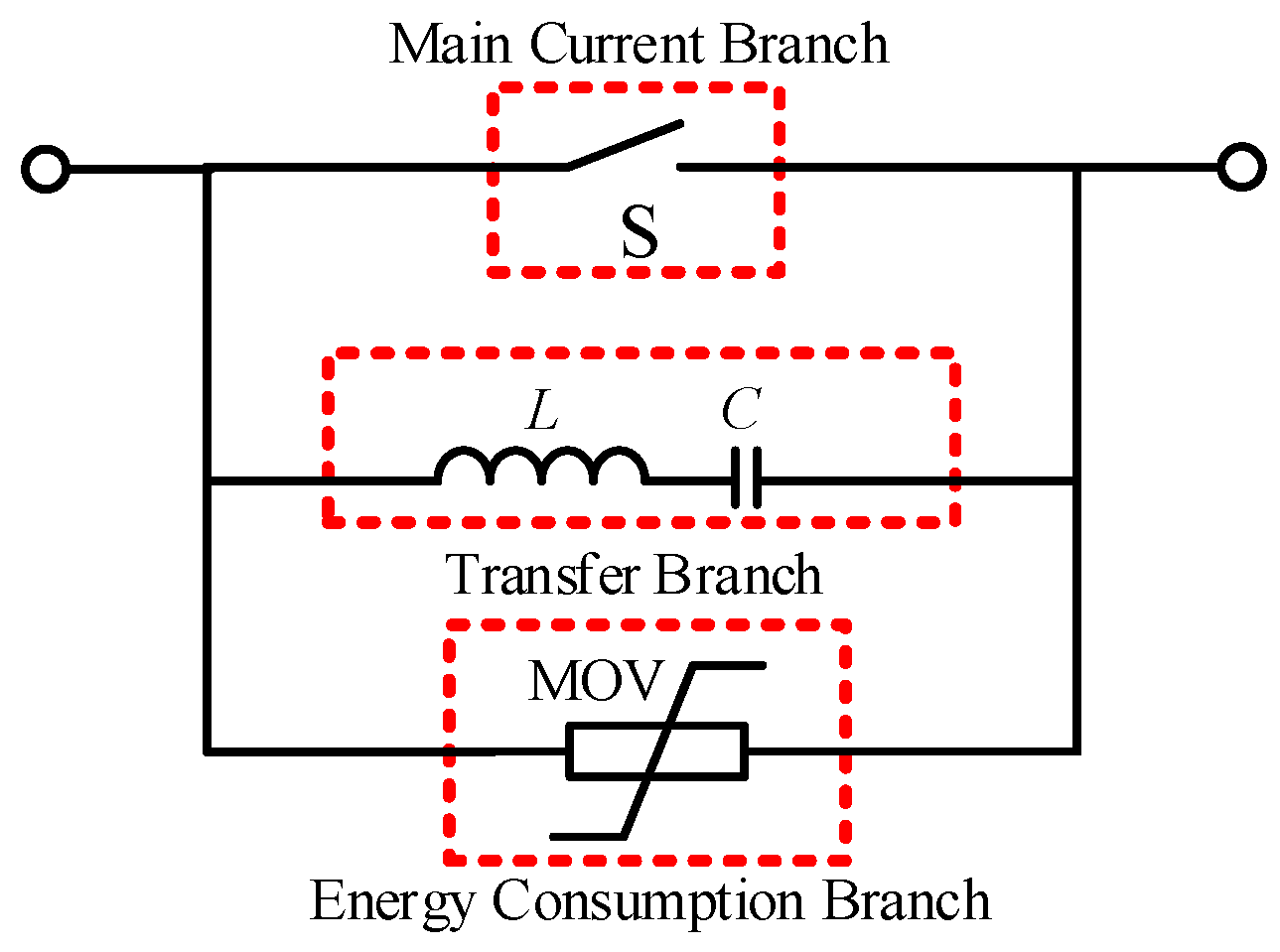
2.2. Mechanical DC Circuit Breaker
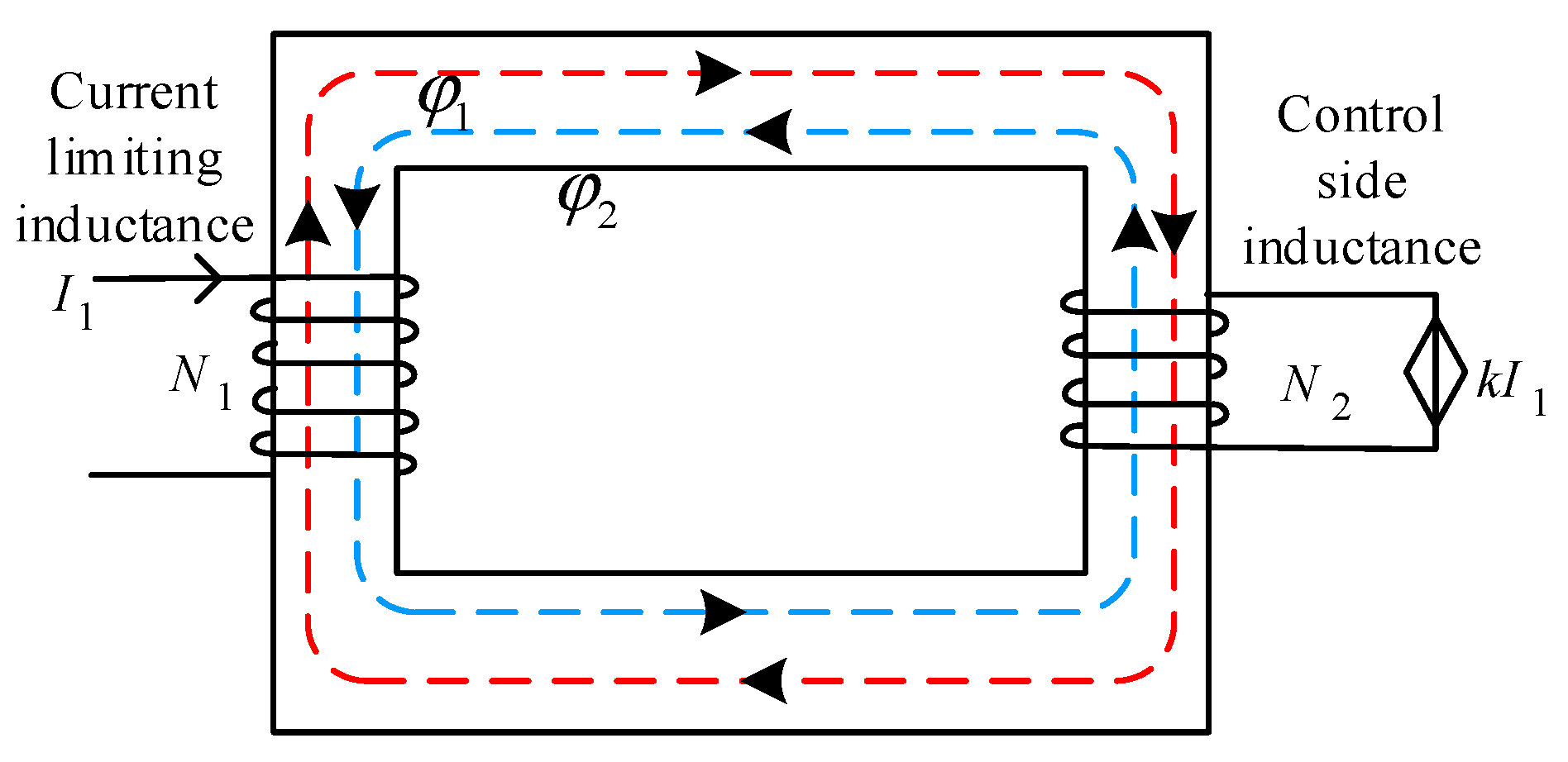
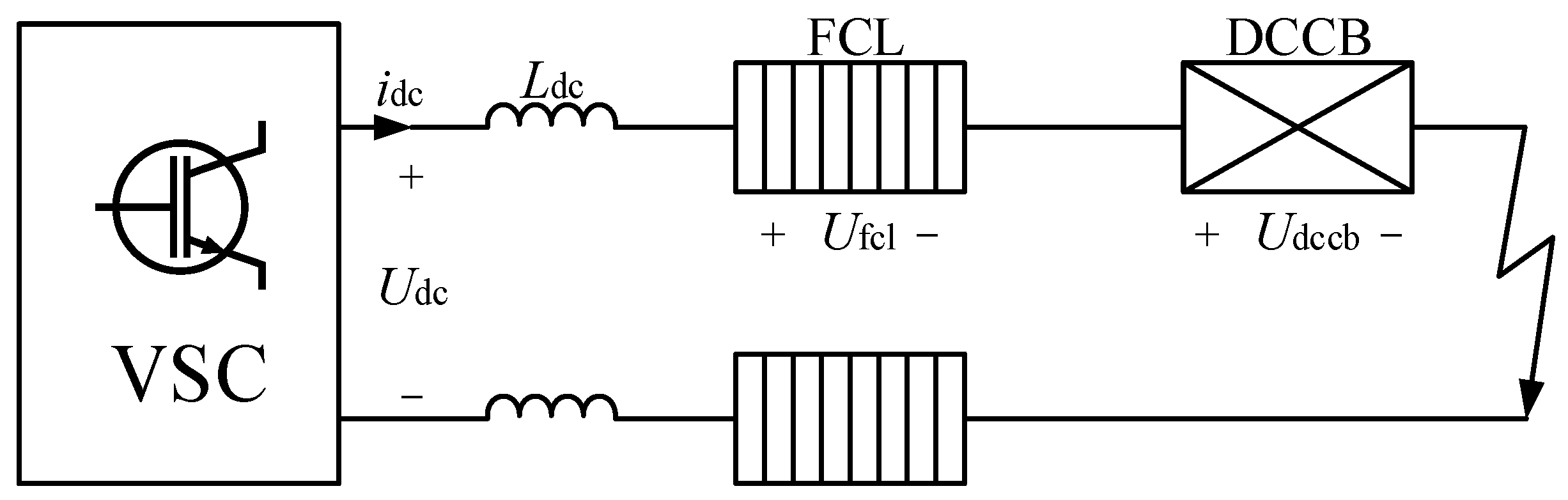
2.3. Flexible Current Limiter
- (1)
- In order to match the DC circuit breaker breaking fault current, the maximum value of the fault current should be less than the breaking current of the circuit breaker;
- (2)
- In order to ensure the safe operation of the circuit breaker, the change rate of the current on the DC side should be less than the maximum change rate of the circuit breaker;
- (3)
- In order to protect the diode of the converter station, the sum of the DC fault detection time and the fault clear time should be less than the discharge time of the DC capacitor.
3. Short-Circuit Fault Analysis
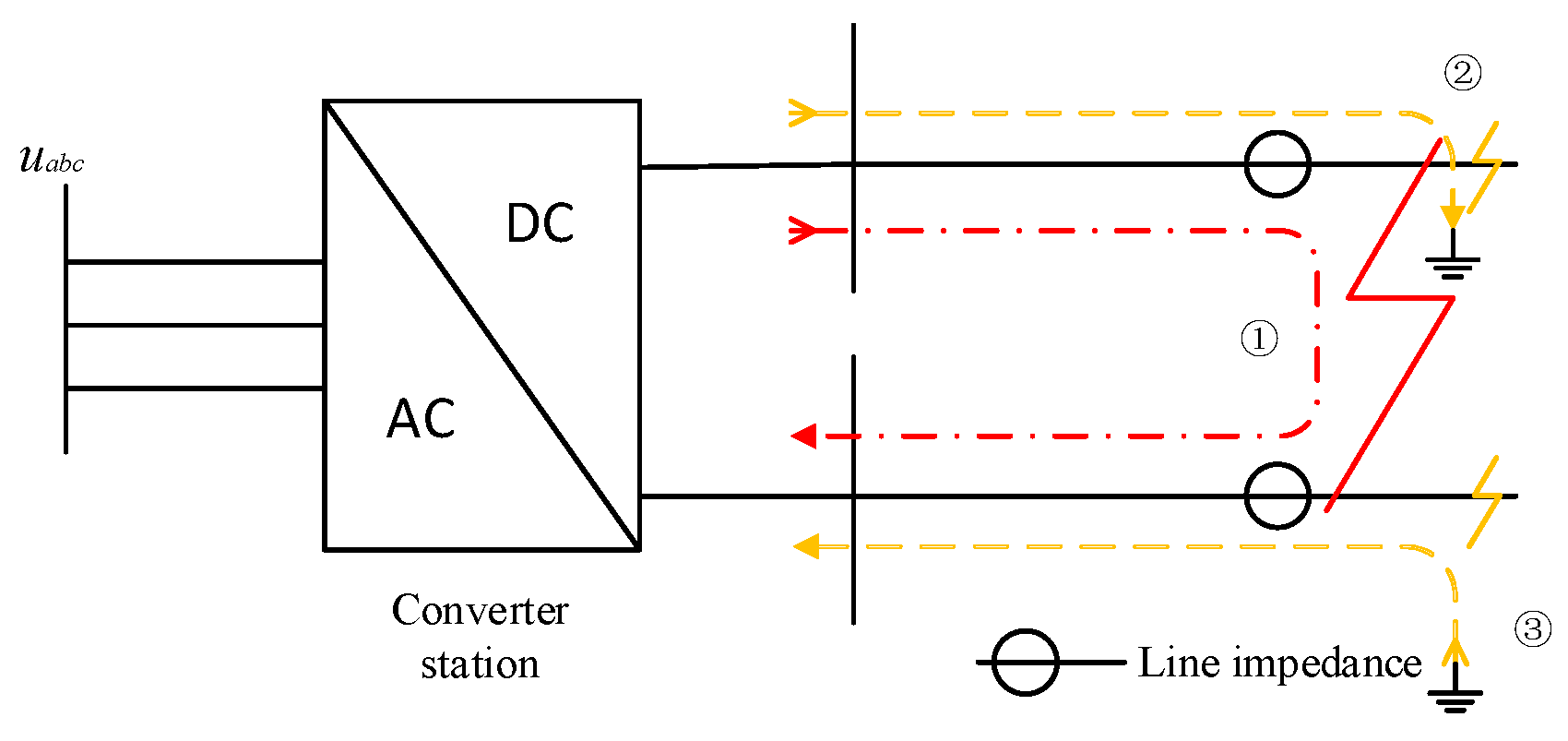
3.1. Unipolar Grounding Failure
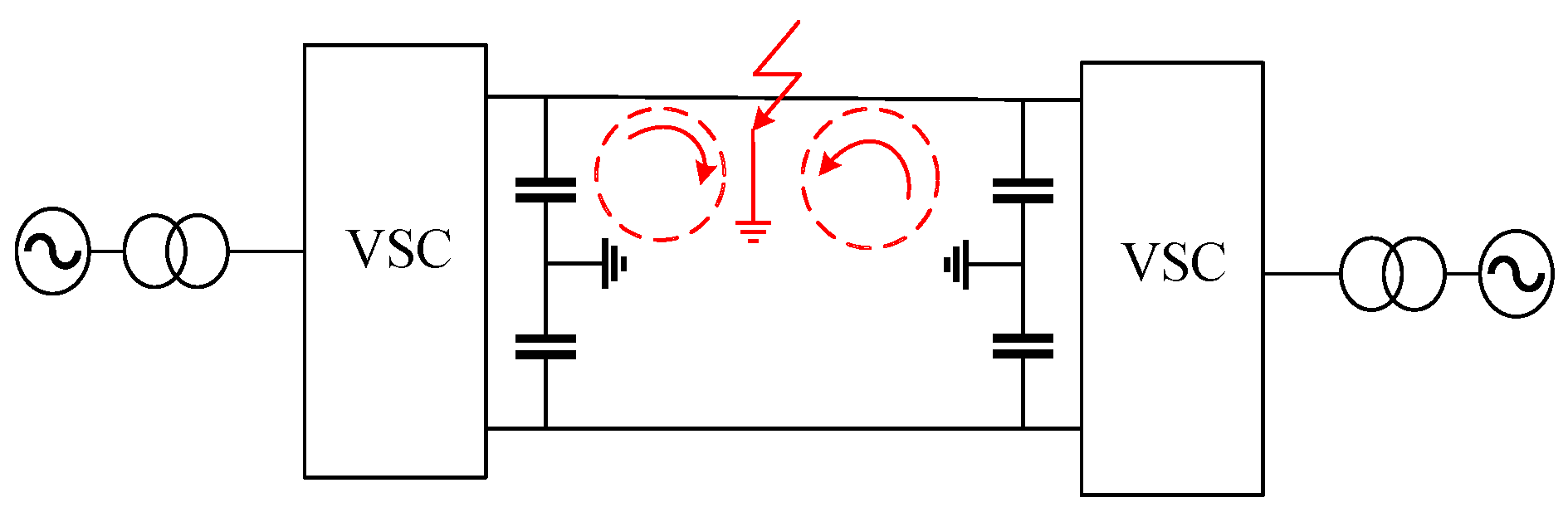
3.2. Interpole Short-Circuit Fault
- (1)
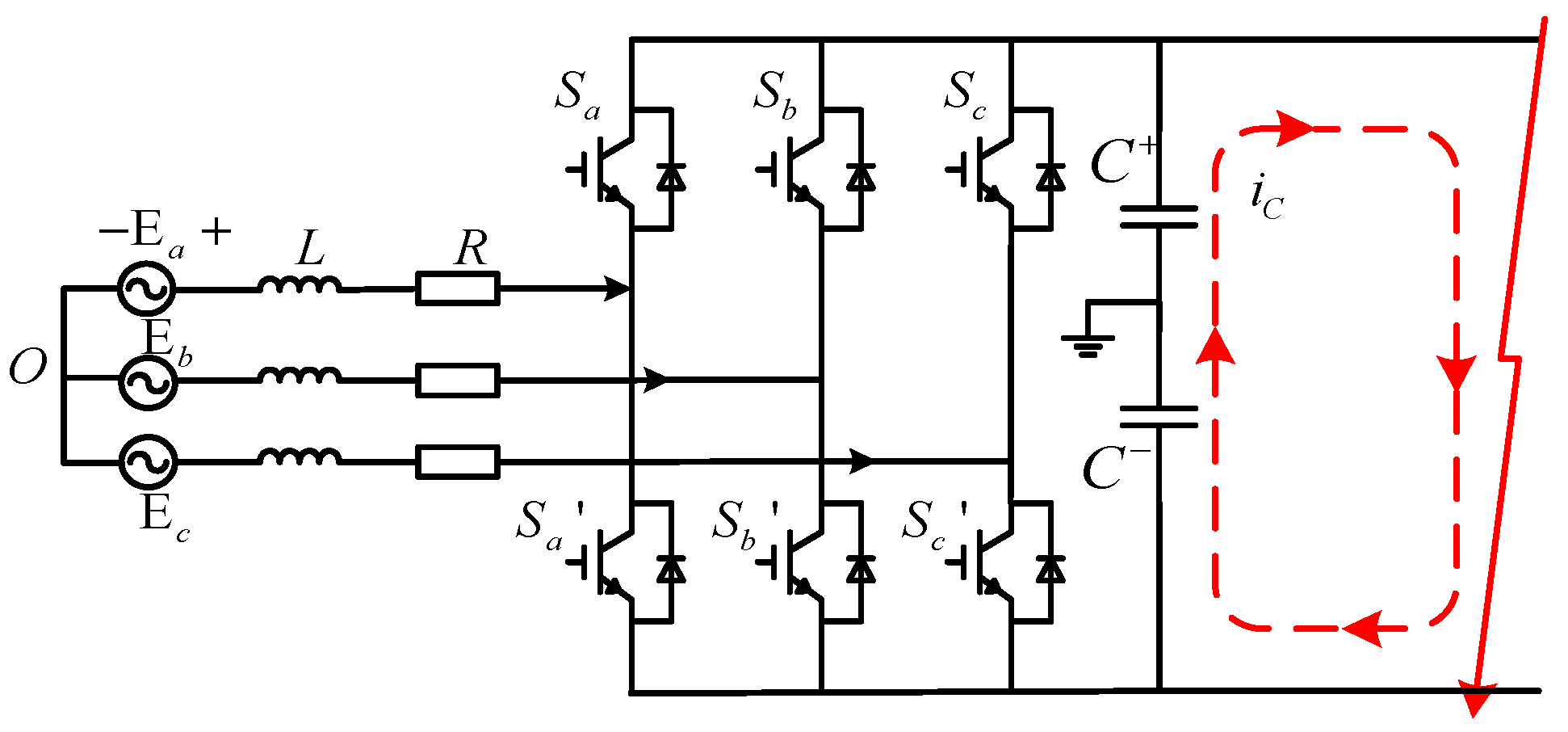
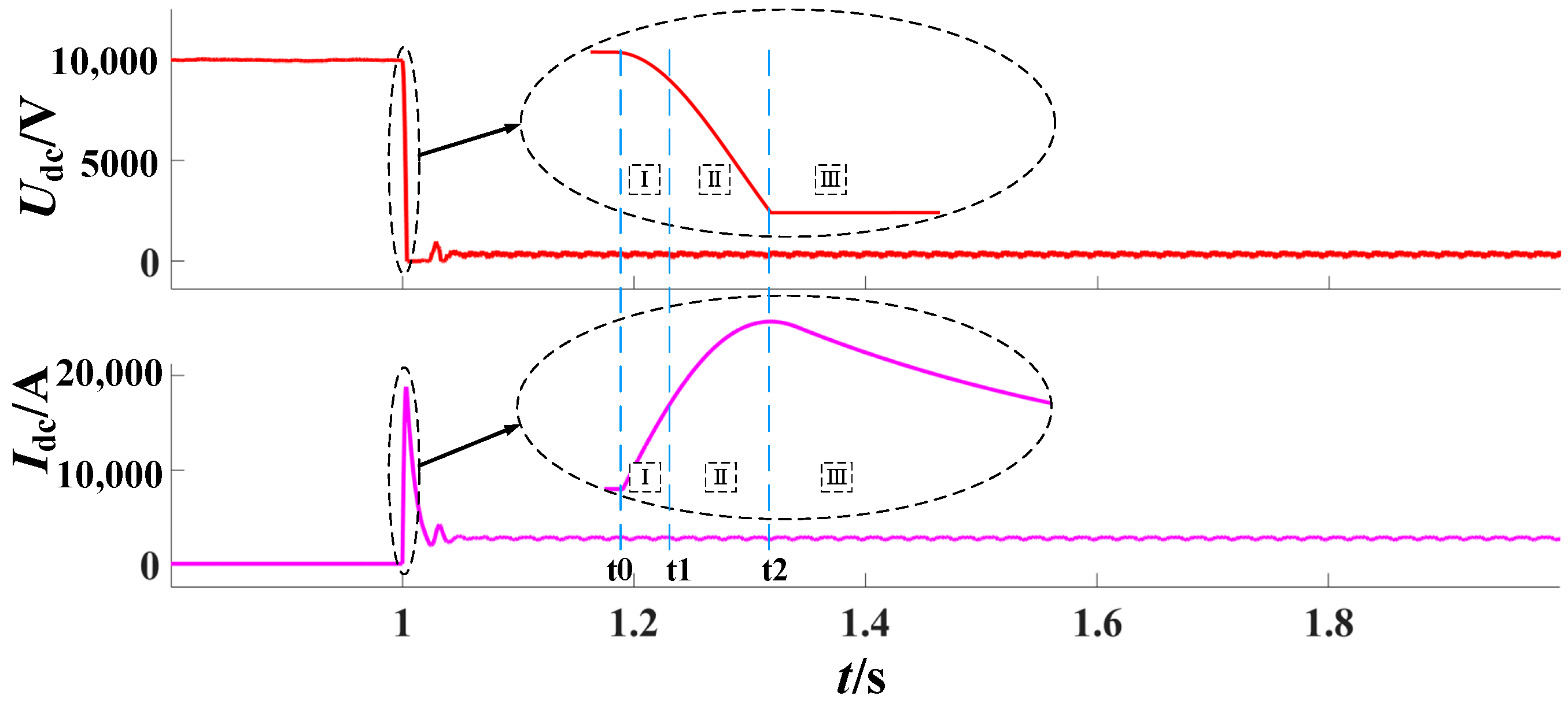
- DC-side capacitive discharge stage: When a fault occurs, the DC-side capacitive voltage is higher than the AC-side line voltage. At this point, the capacitor supplies power to the fault circuit, while the AC side provides only the line reactance continuation current. During this phase, the capacitive voltage drops rapidly, and the fault current rises sharply.
- (2)
- Diode alternating uncontrolled rectification stage: As the DC-side capacitor voltage drops to the level of the AC-side line voltage, the AC side begins feeding current to the fault point through the uncontrolled rectifier bridge. The DC-side capacitor continues to discharge, causing the fault current to continue rising.
- (3)
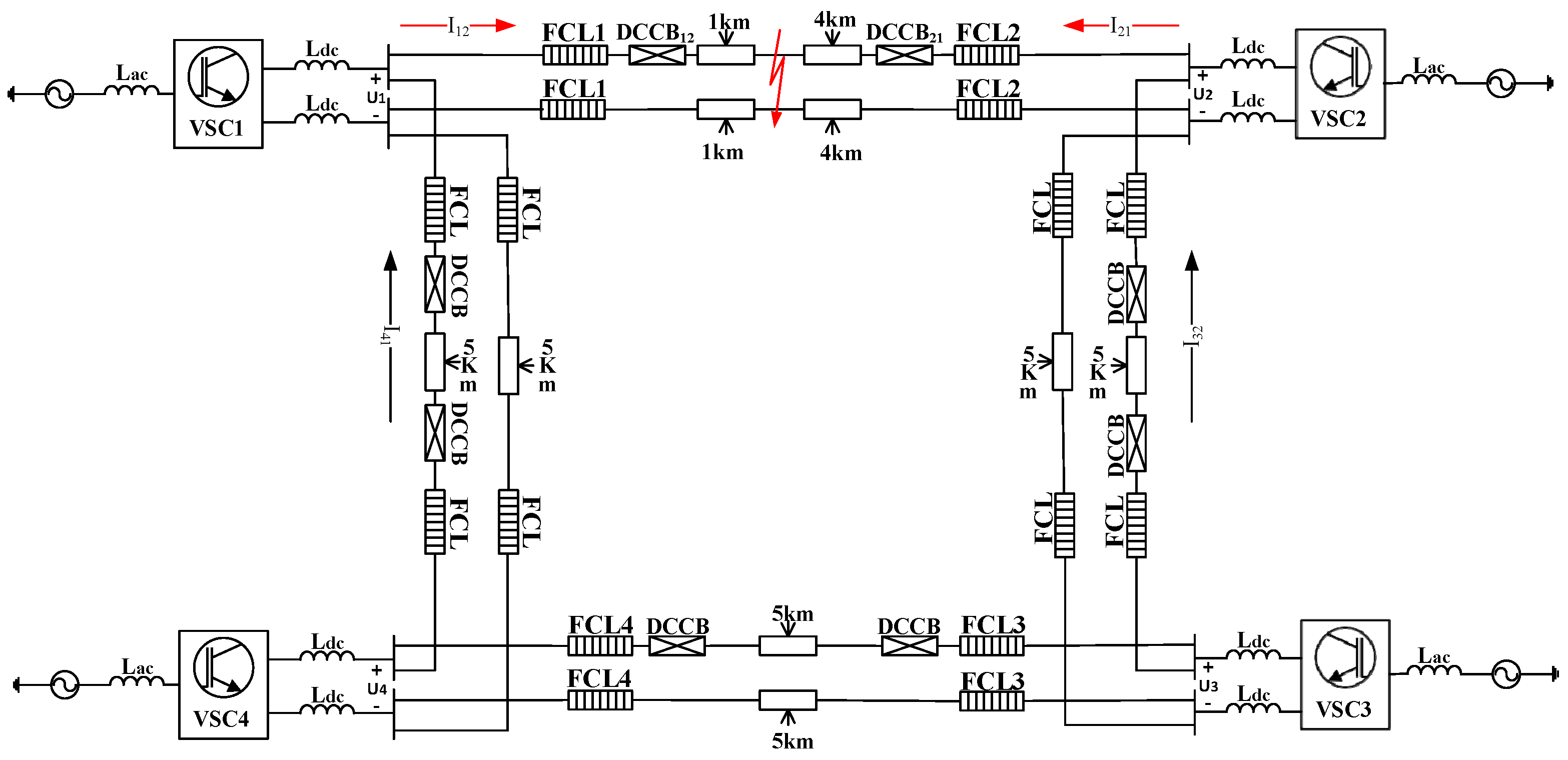
- Full diode conduction stage: When the capacitor discharges to zero, all diodes turn on due to the back electromotive force generated by the DC-side reactance, leading to a decrease in the DC-side short-circuit current. The AC side essentially experiences a three-phase short-circuit fault, resulting in a rapid overcurrent. The converter then faces the impact of short-circuit currents on both the DC and AC sides, transitioning the system to the fault steady-state stage. The equivalent model of the fault phase is shown in the Figure 8, where RL and LL represent the equivalent resistance and inductance of the DC line, and Rs and Ls represent the equivalent resistance and inductance of the AC line.
4. Protection Configuration Based on Current Limiter
4.1. Current Limiter Control Strategy
- (1)
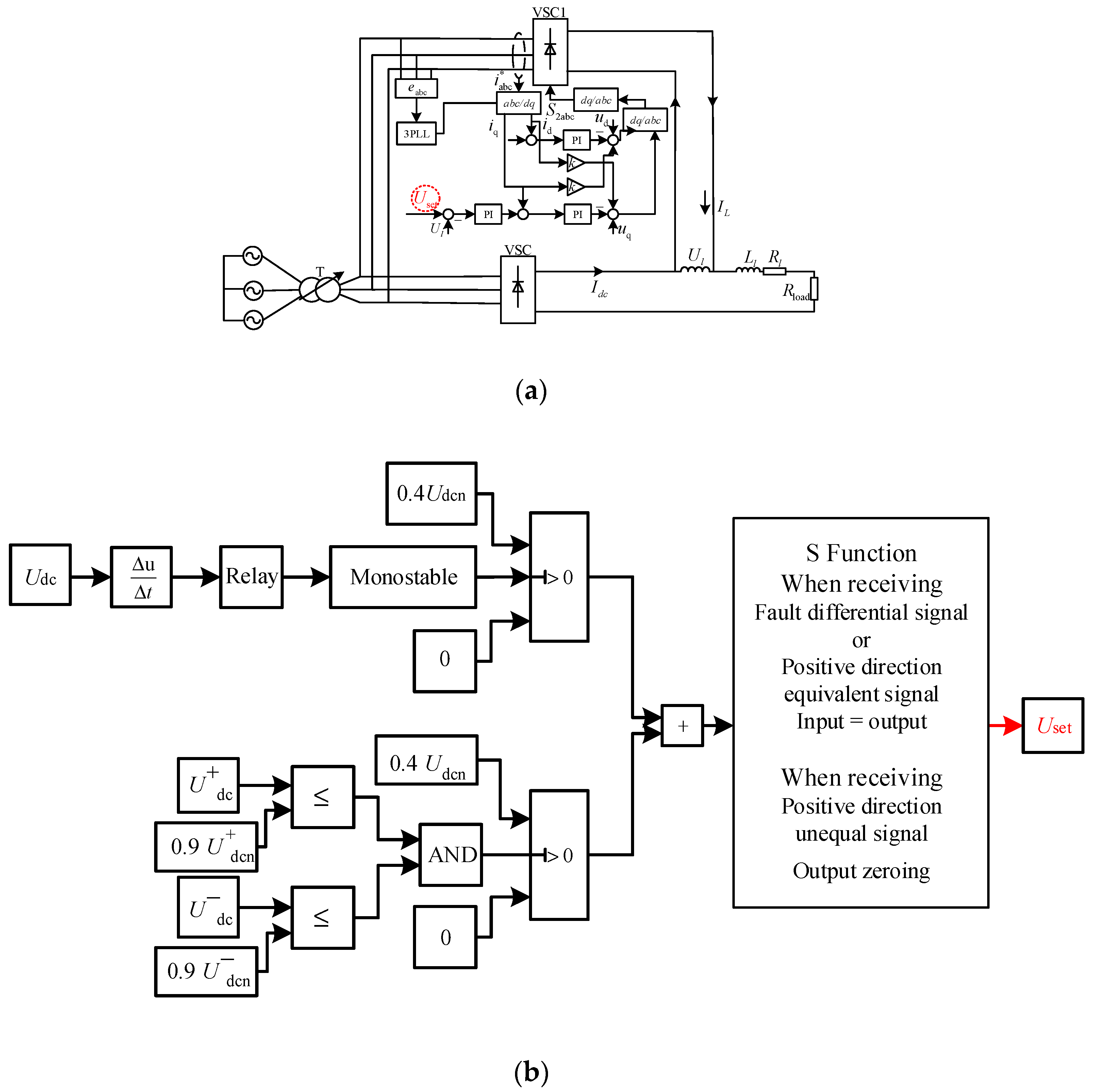
- Monitoring Voltage Differential: The voltage differential between the poles on the DC side is monitored. When a fault occurs, this differential voltage rapidly spikes to its maximum value. The peak voltage differential between a pole fault and a unipolar grounding fault is observed, and the voltage differential trigger threshold is set using the Relay module in SIMULINK. Upon fault detection, the trigger signal outputs a value of 1, which is sustained for a certain duration via the Monostable module. Subsequently, 0.4 times the rated voltage is input to the current limiter, allowing the capacitive voltage to be clamped immediately to suppress short-term discharges that could lead to excessive short-circuit currents. Since factors such as fault type, fault location, and transition resistance can all influence the threshold setting, the influencing factors are studied under different operating conditions, and the minimum value within the identified range is used as the basis for setting the threshold [21].
- (2)
- Under-Voltage Judgment for Fault Type Determination: The voltage differential alone cannot reliably distinguish between a single pole grounding fault and an interpole short-circuit fault, so under-voltage detection is employed as the second stage for control input. Given the millisecond delay that occurs as the capacitor discharges to the set parameter value, this stage is executed simultaneously with the first stage. If only the positive or negative voltage does not exceed 0.9 times the rated value, it is determined that a single pole grounding fault has occurred on the DC side, and no further voltage is input to the current limiter. If both the positive and negative voltages do not exceed 0.9 times their respective rated values, it is judged that an interpole fault has occurred on the DC side. In this case, 0.4 times the rated voltage is again input to the current limiter, and the capacitor voltage is raised to 0.8 times the rated voltage, effectively limiting the fault current to near the rated current level. In the control strategy depicted in Figure 10b, when the current limiter is placed in the positive line, the inductance of the current limiter in the negative line does not change its voltage control mode; instead, the input value is adjusted to a negative value. The judgment threshold is set at 0.9 times the rated value in the second stage because voltage sag occurs when the specified voltage drops to 10–90% in the DC system.
- (3)
- Fault Expansion and Identification: When a fault occurs, it quickly propagates throughout the network, causing the flexible current limiter at each converter station outlet to detect and respond to the fault. Therefore, it is crucial to include fault identification for both in-zone and out-of-zone faults within the current limiter. The flexible current limiter must activate immediately upon fault detection. After determining whether the fault is inside or outside the zone, if it is an in-zone fault, the current limiter should continue operating. Conversely, if the fault is out-of-zone, the out-of-zone current limiter should be bypassed to prevent unnecessary energy loss. When the flexible current limiter receives a fault differential signal or an in-zone fault signal, the original inductive voltage input control remains unchanged to facilitate fault isolation. If an out-of-zone fault signal is received, the input control is cleared to avoid unnecessary operation of the out-of-zone flexible current limiter.
4.2. Internal and External Failure Judgment
4.3. Coordination Principle of Current Limiter and Circuit Breaker
5. Simulation Validation
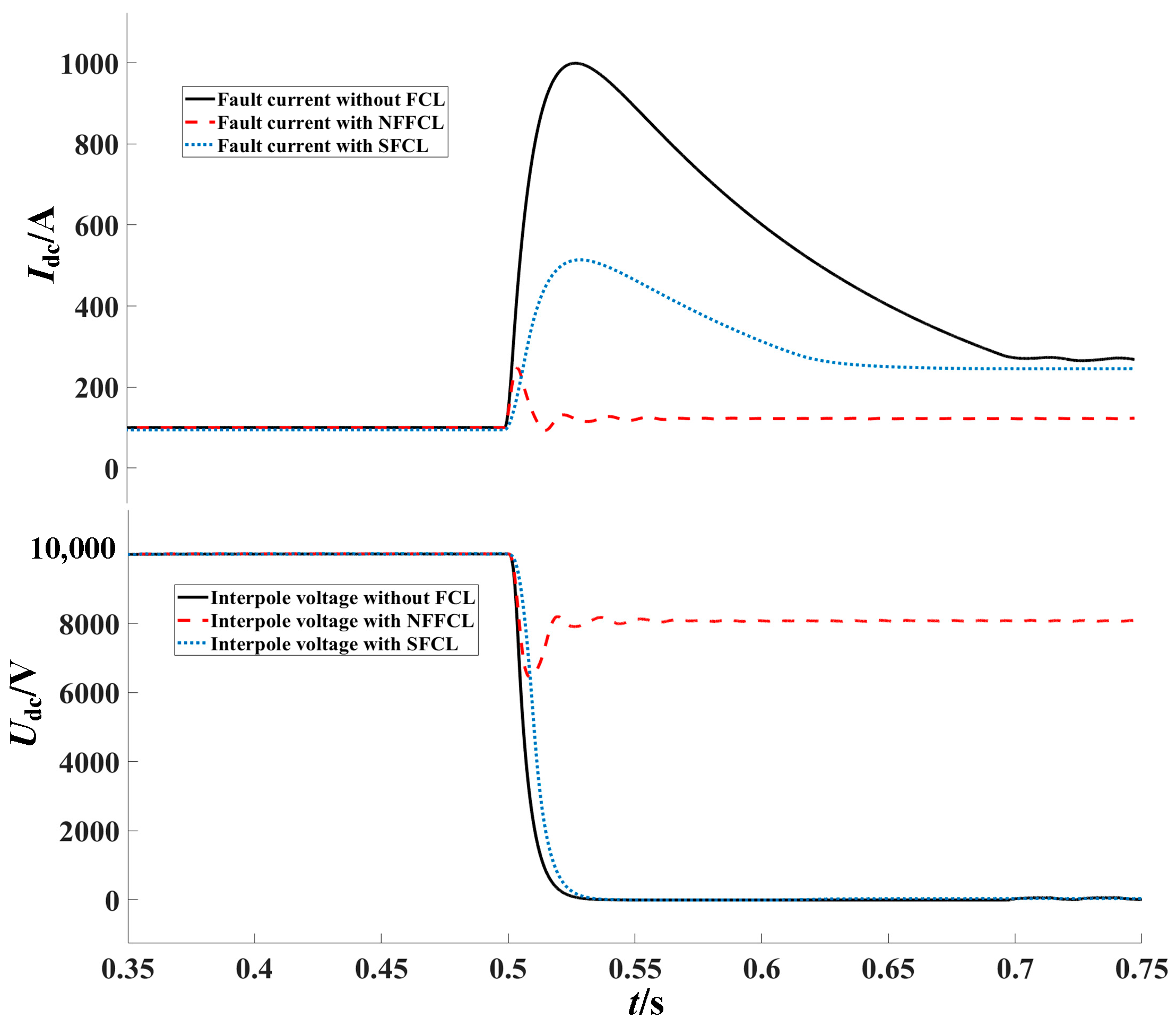
5.1. Action Effect with Current Limiter Only
5.2. Fault Cleaning with Circuit Breaker Only
5.3. Fault Cleaning with Current Limiter and Circuit Breaker
6. Conclusions
- (1)
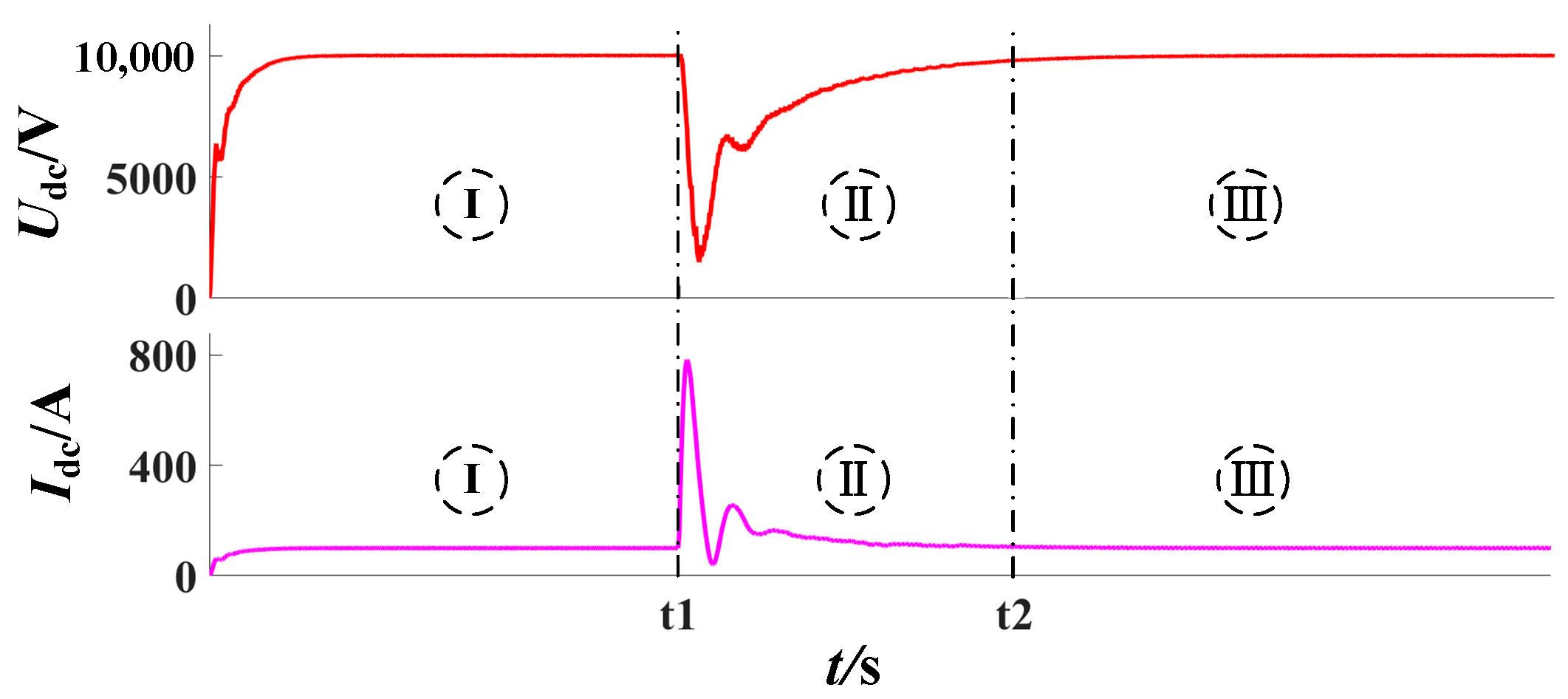
- Bypass State During Normal Operation: The new flexible current limiter remains in a bypass state during normal operation, exerting no effect on the system. After a fault occurs, the current limiter clamps the voltage at its terminals through the AC-side rectifier, alters the DC-side discharge state, slows the rise of the fault current, reduces its amplitude, and lowers the requirements for the breaking speed and capacity of the DC circuit breaker.
- (2)
- High Flexibility and Adaptability: The flexible current limiter is composed of power electronic devices and their control modules, allowing it to be adjusted to handle different fault conditions with high flexibility. Its action time can be set according to the breaking speed of the DC-side circuit breaker. The flexible current limiter returns to the bypass state immediately after the fault is cleared, and depletes the fault energy stored in the current limiter inductance through an anti-magnetic flux device, thereby better preparing for subsequent faults.
- (3)
- Enhanced System Reliability: The proposed protection strategy, combining the flexible current limiter with the circuit breaker, enables the circuit breaker in the fault zone to operate independently during a short-circuit fault in the DC system. This approach minimizes the extent of power outages, prevents the collapse of the entire MTDC system, and limits the rise rate and amplitude of the fault current to avoid converter station blocking. As a result, the converter station can resume operation promptly after the fault is cleared, thereby improving the reliability of the system’s power supply.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fan, Y.; Chi, Y.; Li, Y.; Wang, Z.; Liu, H.; Liu, W.; Li, X. Key technologies for medium and low voltage DC distribution system. Glob. Energy Interconnect. 2021, 4, 91–103. [Google Scholar] [CrossRef]
- Perera, C.; Salmon, J.; Kish, G.J. Multiport Converter with Independent Control of AC and DC Power Flows for Bipolar DC Distribution. IEEE Trans. Power Electron. 2021, 36, 3473–3485. [Google Scholar] [CrossRef]
- Feng, X.; Xiong, Q.; Wardell, D.; Gattozzi, A.L.; Strank, S.M.; Hebner, R.E. Extra-Fast DC distribution system protection for future energy systems. IEEE Trans. Ind. Appl. 2019, 55, 3421–3430. [Google Scholar] [CrossRef]
- Muniappan, M. A comprehensive review of DC fault protection methods in HVDC transmission systems. Prot. Control. Mod. Power Syst. 2021, 6, 1. [Google Scholar] [CrossRef]
- Mirsaeidi, S.; Dong, X.; Shi, S.; Wang, B. AC and DC microgrids: A review on protection issues and approaches. J. Electr. Eng. Technol. 2017, 12, 2089–2098. [Google Scholar]
- Faazila Fathima, S.; Premalatha, L. Protection Strategies for AC and DC Microgrid–A Review of Protection Methods Adopted in Recent Decade. IETE J. Res. 2021, 69, 6573–6589. [Google Scholar] [CrossRef]
- He, Y.; Zheng, X.; Tai, N.; Wang, J.; Nadeem, M.H.; Liu, J. A DC Line Protection Scheme for MMC-Based DC Grids Based on AC/DC Transient Information. IEEE Trans. Power Deliv. 2020, 35, 2800–2811. [Google Scholar] [CrossRef]
- Bayati, N.; Hajizadeh, A.; Soltani, M. Protection in DC microgrids: A comparative review. IET Smart Grid 2018, 1, 66–75. [Google Scholar] [CrossRef]
- Li, C.; Rakhra, P.; Norman, P.J.; Burt, G.M.; Clarkson, P. Multi-Sample Differential Protection Scheme in DC Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 2560–2573. [Google Scholar] [CrossRef]
- Chandra, A.; Singh, G.K.; Pant, V. Protection techniques for DC microgrid—A review. Electr. Power Syst. Res. 2020, 187, 106439. [Google Scholar] [CrossRef]
- Xiang, W.; Yang, S.; Xu, L.; Zhang, J.; Lin, W.; Wen, J. A Transient Voltage-Based DC Fault Line Protection Scheme for MMC-Based DC Grid Embedding DC Breakers. IEEE Trans. Power Deliv. 2019, 34, 334–345. [Google Scholar] [CrossRef]
- Javed, W.; Chen, D.; Farrag, M.E.; Xu, Y. System configuration, fault detection, location, isolation and restoration: A review on LVDC microgrid protections. Energies 2019, 12, 1001. [Google Scholar] [CrossRef]
- Li, Y.; Liang, S.; Chen, X.; Chai, X.; Sun, C.; Zhu, H. Line protection scheme for DC distribution grids. Dianli Xitong Baohu Yu Kongzhi/Power Syst. Prot. Control. 2019, 47, 136–144. [Google Scholar]
- Jovcic, D.; Lin, W.; Nguefeu, S.; Saad, H. Low-energy protection system for DC grids based on full-bridge MMC converters. IEEE Trans. Power Deliv. 2018, 33, 1934–1943. [Google Scholar] [CrossRef]
- Yang, S.; Xiang, W.; Wen, J. Analysis of impact of grounding-pole current-limiting reactor on fault detection of MMC based DC grids. In Proceedings of the 8th Renewable Power Generation Conference (RPG 2019), Shanghai, China, 24–25 October 2019; IET Conference Publications: London, UK, 2019. [Google Scholar] [CrossRef]
- Gao, P.; Zheng, X.; Chao, C.; Tai, N.; Yang, Z.; Wang, J. Protection for Multi-terminal Flexible DC Transmission Lines Based on Boundary Transient Energy. Dianli Xitong Zidonghua/Autom. Electr. Power Syst. 2021, 45, 171–179. [Google Scholar]
- Zhu, S.; Zhao, C.; Xu, J. Time-sequence Coordination of Protection in DC Grid with Multi-type Fault Current Limiting Devices. Dianli Xitong Zidonghua/Autom. Electr. Power Syst. 2019, 43, 195–207. [Google Scholar]
- Yang, Q.; le Blond, S.; Liang, F.; Yuan, W.; Zhang, M.; Li, J. Design and Application of Superconducting Fault Current Limiter in a Multiterminal HVDC System. IEEE Trans. Appl. Supercond. 2017, 27, 3800805. [Google Scholar] [CrossRef]
- Xiang, B.; Gao, L.; Liu, Z.; Geng, Y.; Wang, J. Short-circuit fault current-limiting characteristics of a resistive-type superconducting fault current limiter in DC grids. Supercond. Sci. Technol. 2020, 33, 024005. [Google Scholar] [CrossRef]
- Zheng, F.; Zhang, J.; Lin, J.; Deng, C.; Huang, J. A Novel Flexible Fault Current Limiter for DC Distribution Applications. IEEE Trans. Smart Grid 2022, 13, 1049–1060. [Google Scholar] [CrossRef]
- Gao, B.; Dong, P.; Liu, X.; Zhang, X.; Zhang, Y.; Ma, Y.; Zhao, S. Research of HVDC transmission line differential under-voltage protection characteristics and value setting. Dianwang Jishu/Power Syst. Technol. 2015, 39, 2303–2311. [Google Scholar]
- Li, B.; He, J.; Li, Y.; Li, B.; Wen, W. High-speed directional pilot protection for MVDC distribution systems. Int. J. Electr. Power Energy Syst. 2020, 121, 106141. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| VSC1 | VSC2 | VSC3 | VSC4 | |
|---|---|---|---|---|
| Rated capacity of converter station (MV·A) | 20 | 10 | 10 | 10 |
| DC-side voltage/kV | ±5 | ±5 | ±5 | ±5 |
| DC-side capacitance value/mF | 4 | 2 | 2 | 2 |
| AC-side reactance value/mH | 50 | 70 | 70 | 70 |
| Flat-wave reactor value/mH | 20 | 20 | 20 | 20 |
| Control mode | U, Q | P, Q | P, Q | P, Q |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, L.; Lv, J.; Chen, J.; Zheng, F.; Liang, N. Protection and Fault Isolation Scheme for DC Distribution Network Based on Active Current-Limiting Control. Symmetry 2024, 16, 1275. https://doi.org/10.3390/sym16101275
Cao L, Lv J, Chen J, Zheng F, Liang N. Protection and Fault Isolation Scheme for DC Distribution Network Based on Active Current-Limiting Control. Symmetry. 2024; 16(10):1275. https://doi.org/10.3390/sym16101275
Chicago/Turabian StyleCao, Langheng, Jiawen Lv, Jing Chen, Feng Zheng, and Ning Liang. 2024. "Protection and Fault Isolation Scheme for DC Distribution Network Based on Active Current-Limiting Control" Symmetry 16, no. 10: 1275. https://doi.org/10.3390/sym16101275