


Comparative Study on Effects of Input Configurations of Linear Quadratic Controller on Path Tracking Performance under Low Friction Condition


Abstract
:1. Introduction
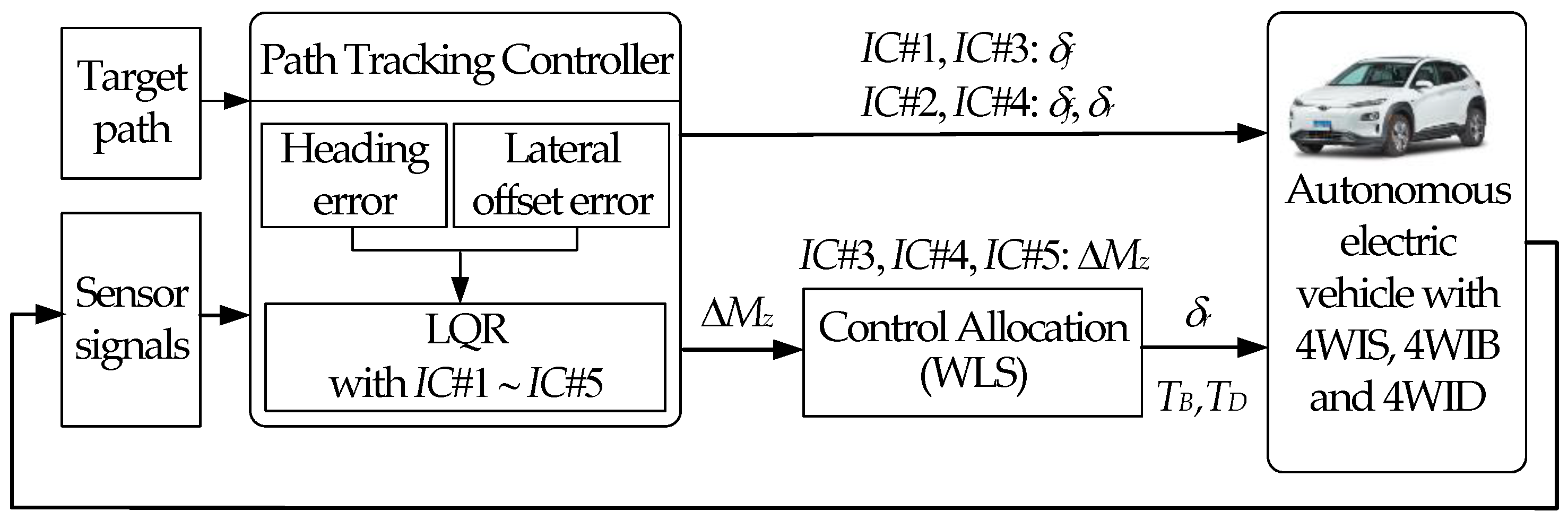
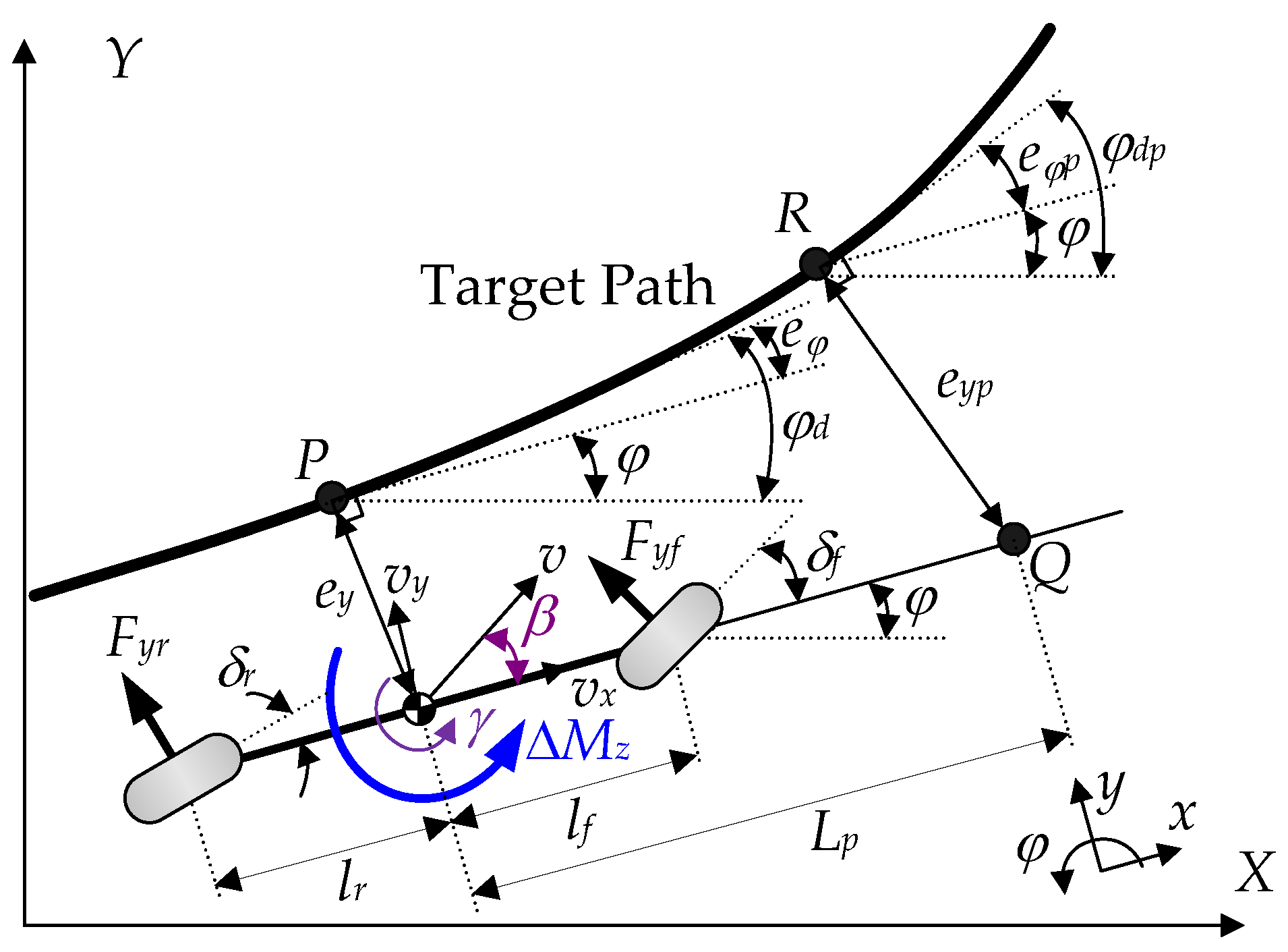
2. Design of Path Tracking Controller with LQR
2.1. Design of LQR
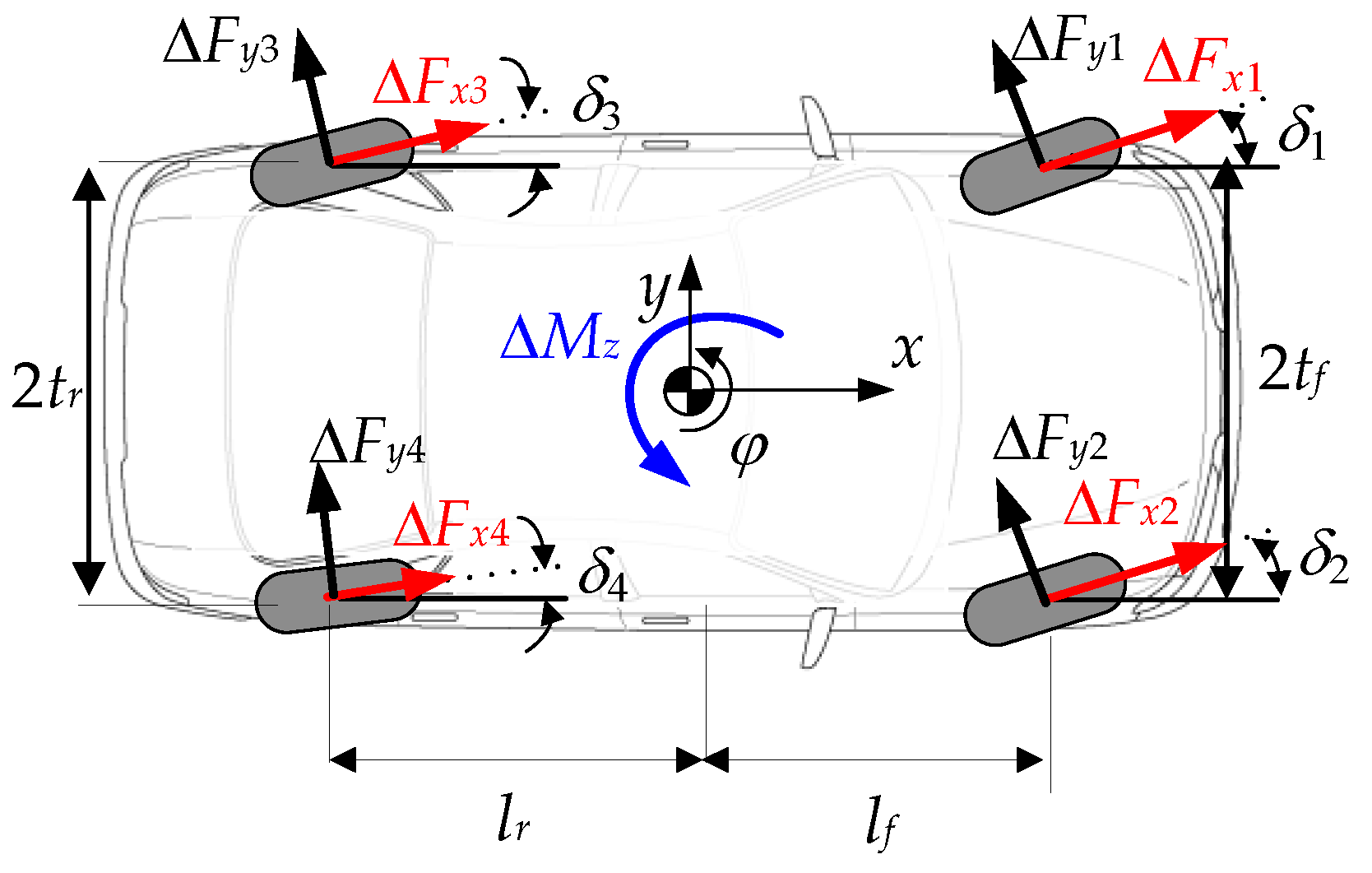
2.2. Control Allocation with the WLS-Based Method
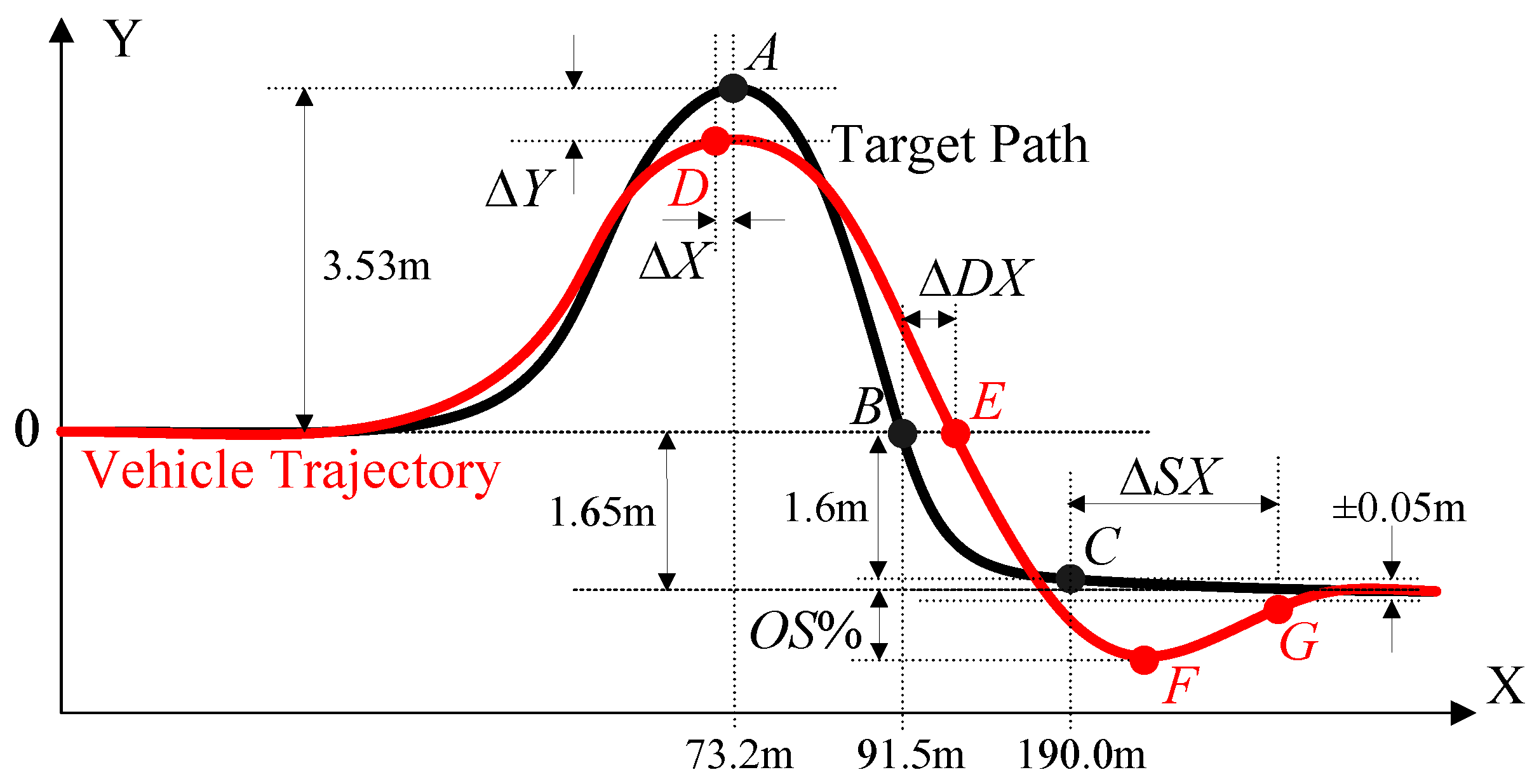
3. Performance Measures for Path Tracking Control
4. Simulation and Validation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| 4WS | 4-wheel steering |
| 4WIS | 4-wheel independent steering |
| 4WIB | 4-wheel independent braking |
| 4WID | 4-wheel independent drive |
| AFS | active front steering |
| FWS | front wheel steering |
| MASSA | maximum absolute side-slip angle |
| RWS | rear wheel steering |
| RWIS | rear wheel independent steering |
| TFM | tire force margin |
| WLS | weighted least square |
| Cf, Cr | cornering stiffness of front and rear tires (N/rad) |
| Ci | cornering stiffness of i-th wheel (N/rad) |
| ey, eφ | lateral offset error (m) and heading error (rad) |
| eyp, eφp | lateral offset error (m) and heading error (rad) obtained from lookahead |
| Fxi, Fyi, Fzi | longitudinal, lateral, and vertical tire forces of i-th wheel (N) |
| Fyf, Fyr | front and rear lateral tire forces in the 2-DOF bicycle model (N) |
| g | vector used for the equality constraint in WLS-based method |
| h() | capacity curve of an electric motor |
| H | matrix used for the constraint on RWS and 4WS in the WLS-based method |
| Iz | yaw moment of inertial (kg·m2) |
| Ji | LQ objective function for the input configuration IC#i |
| KLQR,i | gain matrix of LQR for input configuration IC#i |
| kv | velocity gain for lookahead distance |
| Lp | lookahead distance (m) |
| lf, lr | distance from CoG to front and rear axles (m) |
| m | vehicle total mass (kg) |
| OS% | percentage of overshoot in the lower lane of the target path |
| q | vector of tire forces as a solution to the WLS-based method |
| rwi | radius of i-th wheel (m) |
| TBi, TDi | braking and traction torques applied at i-th wheel (N·m) |
| tf, tr | half of track widths of front and rear axles (m) |
| vx, vy | longitudinal and lateral velocities of CoG of a vehicle (m/s) |
| W | weighting matrix of the WLS-based method |
| X(∗), Y(∗) | x- and y-positions of the point ∗ on the target path and vehicle trajectory |
| Yref(X) | y-position of the target path with respect to X |
| y | lateral offset of a vehicle |
| yd, ydp | desired lateral offset obtained without and with lookahead |
| αf, αr | tire slip angles of front and rear wheels (rad) |
| αi | tire slip angle of i-th wheel (rad) |
| β | side-slip angle of CoG of a vehicle (rad) = tan−1(vy/vx) ≈ (vy/vx) |
| δf, δr | front and rear steering angles (rad) |
| δi | steering angle of i-th wheel (rad) |
| εi | virtual weights on corresponding lateral and longitudinal tire forces |
| ΔFxi, ΔFyi | control longitudinal and lateral forces generated by an actuator (N) |
| ΔFx | longitudinal force as a control input in LQR (N) |
| ΔMz | control yaw moment as a control input in LQR (N·m) |
| ΔX, ΔY | differences between x- and y-positions at the peak points of the target path |
| ΔDX, ΔSX | response and settling delays of vehicle trajectory with respect to target path |
| γ, γd | real and reference yaw rates (rad/s) |
| η | tuning parameter on relaxation term of equality constraint |
| χ | curvature at a particular point on a target path |
| κ | virtual weight on the longitudinal and lateral tire forces |
| κ | vector of virtual weights |
| ξi | the maximum allowable value of i-th term in LQ objective function |
| ξ | vector of the maximum allowable values |
| ϕi | equivalent slip angle of i-th wheel calculated from control lateral tire force |
| φ | heading angle of a vehicle |
| φd, φdp | desired heading angle obtained without and with lookahead |
| ψref(χ) | heading angle of the target path with respect to X |
| μ | tire-road friction coefficient |
| ωi | rotational speed of i-th wheel (rad/s) |
| ρi | weight on i-th term in LQ objective function |
| σ | equivalent slip ratio for slip angle calculation |
| ζi | ratio of reduction gear of i-th wheel |
References
- Montanaro, U.; Dixit, S.; Fallaha, S.; Dianatib, M.; Stevensc, A.; Oxtobyd, D.; Mouzakitisd, A. Towards connected autonomous driving: Review of use-cases. Veh. Syst. Dyn. 2019, 57, 779–814. [Google Scholar] [CrossRef]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A survey of autonomous driving: Common practices and emerging technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Omeiza, D.; Webb, H.; Jirotka, M.; Kunze, M. Explanations in autonomous driving: A survey. IEEE Trans. Intell. Transp. Syst. 2022, 23, 10142–10162. [Google Scholar] [CrossRef]
- Sorniotti, A.; Barber, P.; De Pinto, S. Path tracking for automated driving: A tutorial on control system formulations and ongoing research. In Automated Driving; Watzenig, D., Horn, M., Eds.; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Amer, N.H.; Hudha, H.Z.K.; Kadir, Z.A. Modelling and control strategies in path tracking control for autonomous ground vehicles: A review of state of the art and challenges. J. Intell. Robot. Syst. 2017, 86, 225–254. [Google Scholar] [CrossRef]
- Paden, B.; Cap, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef] [Green Version]
- Bai, G.; Meng, Y.; Liu, L.; Luo, W.; Gu, Q.; Liu, L. Review and comparison of path tracking based on model predictive control. Electronics 2019, 8, 1077. [Google Scholar] [CrossRef] [Green Version]
- Yao, Q.; Tian, Y.; Wang, Q.; Wang, S. Control strategies on path tracking for autonomous vehicle: State of the art and future challenges. IEEE Access 2020, 8, 161211–161222. [Google Scholar] [CrossRef]
- Rokonuzzaman, M.; Mohajer, N.; Nahavandi, S.; Mohamed, S. Review and performance evaluation of path tracking controllers of autonomous vehicles. IET Intell. Transp. Syst. 2021, 15, 646–670. [Google Scholar] [CrossRef]
- Stano, P.; Montanaro, U.; Tavernini, D.; Tufo, M.; Fiengo, G.; Novella, L.; Sorniotti, A. Model predictive path tracking control for automated road vehicles: A review. Annu. Rev. Control. 2022. [Google Scholar] [CrossRef]
- Yakub, F.; Mori, Y. Comparative study of autonomous path-following vehicle control via model predictive control and linear quadratic control. Proc. IMechE Part D J. Automob. Eng. 2015, 229, 1695–1714. [Google Scholar] [CrossRef]
- Hu, C.; Wang, R.; Yan, F.; Chen, N. Output constraint control on path following of four-wheel independently actuated autonomous ground vehicles. IEEE Trans Veh. Technol. 2016, 65, 4033–4043. [Google Scholar] [CrossRef]
- Hang, P.; Luo, F.; Fang, S.; Chen, X. Path tracking control of a four-wheel-independent-steering electric vehicle based on model predictive control. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017. [Google Scholar]
- Hang, P.; Chen, X.; Luo, F. Path-tracking controller design for a 4WIS and 4WID electric vehicle with steer-by-wire system. SAE Tech. Pap. 2017, 2688–3627.
- Guo, J.; Luo, Y.; Li, K. An adaptive hierarchical trajectory following control approach of autonomous four-wheel independent drive electric vehicles. IEEE Trans Intell. Transp. Syst. 2018, 19, 2482–2492. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X.; Luo, F. LPV/H∞ controller design for path tracking of autonomous ground vehicles through four-wheel steering and direct yaw-moment control. Int. J. Automot. Technol. 2019, 20, 679–691. [Google Scholar] [CrossRef]
- Ren, Y.; Zheng, L.; Khajepour, A. Integrated model predictive and torque vectoring control for path tracking of 4-wheeldriven autonomous vehicles. IET Intell. Transp. Syst. 2019, 13, 98–107. [Google Scholar] [CrossRef]
- Chen, X.; Peng, Y.; Hang, P.; Tang, T. Path tracking control of four-wheel independent steering electric vehicles based on optimal control. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 5436–5442. [Google Scholar]
- Wu, H.; Si, Z.; Li, Z. Trajectory tracking control for four-wheel independent drive intelligent vehicle based on model predictive control. IEEE Access 2020, 8, 73071–73081. [Google Scholar] [CrossRef]
- Wu, H.; Li, Z.; Si, Z. Trajectory tracking control for four-wheel independent drive intelligent vehicle based on model predictive control and sliding mode control. Adv. Mech. Eng. 2021, 13, 1–17. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X. Path tracking control of 4-wheelsteering autonomous ground vehicles based on linear parameter-varying system with experimental verification. Proc. IMechE Part I J. Syst. Control. Eng. 2021, 235, 411–423. [Google Scholar]
- Xiang, C.; Peng, H.; Wang, W.; Li, L.; An, Q.; Cheng, S. Path tracking coordinated control strategy for autonomous four in-wheel-motor independent-drive vehicles with consideration of lateral stability. Proc. IMechE Part D J. Automob. Eng. 2021, 235, 1023–1036. [Google Scholar] [CrossRef]
- Yang, K.; Tang, X.; Qin, Y.; Huang, Y.; Wang, H.; Pu, H. Comparative study of trajectory tracking control for automated vehicles via model predictive control and robust H-infinity state feedback control. Chin. J. Mech. Eng. 2021, 34, 1–14. [Google Scholar] [CrossRef]
- Wang, G.; Liu, L.; Meng, Y.; Gu, Q.; Bai, G. Integrated path tracking control of steering and braking based on holistic MPC. IFAC Pap. 2021, 54, 45–50. [Google Scholar] [CrossRef]
- Barari, A.; Afshari, S.S.; Liang, X. Coordinated control for path-following of an autonomous four in-wheel motor drive electric vehicle. Proc. IMechE Part C J. Mech. Eng. Sci. 2022, 236, 6335–6346. [Google Scholar] [CrossRef]
- Wang, G.; Liu, L.; Meng, Y.; Gu, Q.; Bai, G. Integrated path tracking control of steering and differential braking based on tire force distribution. Int. J. Control. Autom. Syst. 2022, 20, 536–550. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, Y.; Yang, C.; Qie, T.; Ma, M. Adaptive model predictive control-based path Following control for four-wheel independent drive automated vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 14399–14412. [Google Scholar] [CrossRef]
- Lee, J.; Yim, S. Comparative study of path tracking controllers on low friction roads for autonomous vehicles. Machines. 2023, 11, 403. [Google Scholar] [CrossRef]
- Du, Q.; Zhu, C.; Li, Q.; Tian, B.; Li, L. Optimal path tracking control for intelligent four-wheel steering vehicles based on MPC and state estimation. Proc. IMechE Part D J. Automob. Eng. 2022, 236, 1964–1976. [Google Scholar] [CrossRef]
- Jeong, Y.; Yim, S. Path tracking control with four-wheel independent steering, driving and braking systems for autonomous electric vehicles. IEEE Access 2022, 10, 74733–74746. [Google Scholar] [CrossRef]
- Yim, S. Coordinated control with electronic stability control and active steering devices. J. Mech. Sci. Technol. 2015, 29, 5409–5416. [Google Scholar] [CrossRef]
- Yim, S. Comparison among active front, front independent, 4-wheel and 4-wheel independent steering systems for vehicle stability control. Electronics 2020, 9, 798. [Google Scholar] [CrossRef]
- Wang, J.; Wang, R.; Jing, H.; Chen, N. Coordinated active steering and four-wheel independently driving/braking control with control allocation. Asian J. Control. 2016, 18, 98–111. [Google Scholar] [CrossRef]
- Nah, J.; Yim, S. Vehicle stability control with four-wheel independent braking, drive and steering on in-wheel motor-driven electric vehicles. Electronics 2020, 9, 1934. [Google Scholar] [CrossRef]
- Katsuyama, E.; Yamakado, M.; Abe, M. A state-of-the art review: Toward a novel vehicle dynamics control concept taking the driveline of electric vehicles into account as promising control actuators. Veh. Syst. Dyn. 2021, 59, 976–1025. [Google Scholar] [CrossRef]
- Liang, Y.; Li, Y.; Zheng, L.; Yu, Y.; Ren, Y. Yaw rate tracking-based path-following control for four-wheel independent driving and four-wheel independent steering autonomous vehicles considering the coordination with dynamics stability. Proc. IMechE Part D J. Automob. Eng. 2021, 235, 260–272. [Google Scholar] [CrossRef]
- Wong, H.Y. Theory of Ground Vehicles, 3rd ed.; John Wiley and Sons Inc.: New York, NY, USA, 2001. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control; Springer: New York, NY, USA, 2006. [Google Scholar]
- Guo, J.; Luo, Y.; Li, K.; Dai, Y. Coordinated path-following and direct yaw-moment control of autonomous electric vehicles with sideslip angle estimation. Mech. Syst. Signal Process. 2018, 105, 183–199. [Google Scholar] [CrossRef]
- Peng, H.; Wang, W.; An, Q.; Xiang, C.; Li, L. Path tracking and direct yaw moment coordinated control based on robust MPC with the finite time horizon for autonomous independent-drive vehicles. IEEE Trans. Veh. Technol. 2020, 69, 6053–6066. [Google Scholar] [CrossRef]
- Sharp, R.S.; Casanova, D.; Symonds, P. A mathematical model for driver steering control, with design, tuning and performance results. Veh. Syst. Dyn. 2000, 33, 289–326. [Google Scholar]
- Thommyppillai, M.; Evangelou, S.; Sharp, R.S. Advances in the development of a virtual car driver. Multibody Syst. Dyn. 2009, 22, 245–267. [Google Scholar]
- Xu, S.; Peng, H. Design, analysis and experiments of preview path tracking control for autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 48–58. [Google Scholar] [CrossRef]
- Thrun, S.; Montemerlo, M.; Dahlkamp, H.; Stavens, D.; Aron, A.; Diebel, J.; Fong, P.; Gale, J.; Halpenny, M.; Hoffmann, G.; et al. Stanley: The robot that won the DARPA grand challenge. J. Field Robot. 2006, 23, 661–692. [Google Scholar] [CrossRef]
- Son, Y.S.; Kim, W.; Lee, S.-H.; Chung, C.C. Robust multi-rate control scheme with predictive virtual lanes for lane-keeping system of autonomous highway driving. IEEE Trans. Veh. Technol. 2015, 64, 3378–3391. [Google Scholar] [CrossRef]
- Kang, C.M.; Lee, S.-H.; Chung, C.C. On-road path generation and control for waypoint tracking. IEEE Intell. Transp. Syst. Mag. 2016, 9, 36–45. [Google Scholar] [CrossRef]
- Kim, D.J.; Kang, C.M.; Lee, S.H.; Chung, C.C. Discrete-time integral sliding model predictive control for dynamic lateral motion of autonomous driving vehicles. In Proceedings of the American Control Conference, Washington, DC, USA, 17–19 June 2018; pp. 4757–4763. [Google Scholar]
- Lee, K.; Jeon, S.; Kim, H.; Kum, D. Optimal path tracking control of autonomous vehicle: Adaptive full-state linear quadratic gaussian (LQG) control. IEEE Access 2019, 7, 109120–109133. [Google Scholar] [CrossRef]
- Bryson, A.E.; Ho, Y.C. Applied Optimal Control; Hemisphere: New York, NY, USA, 1975. [Google Scholar]
- Rezaeian, A.; Zarringhalam, R.; Fallah, S.; Melek, W.; Khajepour, A.; Chen, S.-K.; Moshchuck, N.; Litkouhi, B. Novel tire force estimation strategy for real-time implementation on vehicle applications. IEEE Trans. Veh. Technol. 2015, 64, 2231–2241. [Google Scholar] [CrossRef]
- de Castro, R.; Tanelli, M.; Araújo, R.E.; Savaresi, S.M. Design of safety-oriented control allocation strategies for overactuated electric vehicles. Veh. Syst. Dyn. 2014, 52, 1017–1046. [Google Scholar] [CrossRef]
- Yim, S.; Choi, J.; Yi, K. Coordinated control of hybrid 4WD vehicles for enhanced maneuverability and lateral stability. IEEE Trans. Veh. Technol. 2012, 61, 1946–1950. [Google Scholar] [CrossRef]
- Kim, H.H.; Ryu, J. Sideslip angle estimation considering short-duration longitudinal velocity variation. Int. J. Automot. Technol. 2011, 12, 545–553. [Google Scholar] [CrossRef]
- Mechanical Simulation Corporation. VS Browser: Reference Manual, The Graphical User Interfaces of BikeSim, CarSim, and TruckSim; Mechanical Simulation Corporation: Ann Arbor, MI, USA, 2009. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | Input Configuration | Actuators | μ | Reference |
|---|---|---|---|---|
| PID, SMC, LQR, MPC | [δf], [δf δr] | FWS, 4WS | 0.4 | [28] |
| MPC, LQR, FF | [δf], [δf δr], [δf ΔMz] | FWS, 4WS | 0.3 | [11] |
| MPC, SMC | [δf ΔMz], [δf ΔFx] | FWS, 4WIB, 4WID | 0.4 | [20] |
| LQR | [δf ΔMz] | FWS, 4WID | 0.4 | [12] |
| LMI-based SMC | FWS, 4WIB, 4WID | 0.3 | [15] | |
| MPC | FWS, 4WIB, 4WID | 0.3 | [25] | |
| MPC | FWS, 4WID | 0.5 | [27] | |
| MPC | [δf δr ΔMz] | 4WIS | 0.25, 0.5 | [13] |
| MPC | 4WIS, 4WID | 0.25, 0.6 | [14] | |
| LPV/H(control) | 4WIS, 4WID | 0.3 | [16] | |
| MPC | [δf ΔFx] | FWS, 4WID | 0.4 | [17] |
| FWS, 4WIB, 4WID | 0.6 | [19] | ||
| FWS | 0.2 | [23] | ||
| FWS, 4WIB | 0.3 | [24,26] | ||
| LQR | [δf δr] | 4WIS | 0.4, 0.65 | [18] |
| LQR, FF | 4WS | 0.25, 0.5 | [21] | |
| MPC | [δf ΔMz ΔFx] | FWS, 4WIB, 4WID | 0.3 | [22] |
| Input Configurations | Control Inputs | Available Actuators |
|---|---|---|
| IC#1 | u1 = δf | FWS |
| IC#2 | u2 = [δf δr]T | 4WS |
| IC#3 | u3 = [δf ΔMz]T | FWS, RWS, RWIS, 4WID, 4WIB |
| IC#4 | u4 = [δf δr ΔMz]T | 4WS, 4WID, 4WIB |
| IC#5 | u5 = ΔMz | FWS, 4WS, 4WIS, 4WID, 4WIB |
| IC#6 | u6 = [δf ΔFx]T | FWS, 4WID, 4WIB |
| IC#7 | u7 = [δf ΔFx ΔMz]T | FWS, 4WID, 4WIB |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| ms | 1823 kg | Iz | 6286 kg·m2 |
| Cf | 42,000 N/rad | Cr | 62,000 N/rad |
| lf | 1.27 m | lr | 1.90 m |
| tf | 0.80 m | tr | 0.80 m |
| kv | Gains | |
|---|---|---|
| IC#1 | 0.1 | ξ = [0.54, 5.00, 0.30, 10.00, 0.05] |
| IC#2 | 0.1 | ξ = [0.52, 2.00, 0.20, 0.70, 0.05, 0.02] |
| ΔX (m) | ΔY (m) | OS% | ΔDX (m) | ΔSX (m) | MASSA (deg) | |
|---|---|---|---|---|---|---|
| IC#1 | 2.09 | −0.025 | 0.87 | 8.77 | 4.34 | 0.59 |
| IC#2 | 1.99 | −0.026 | 0.66 | 8.35 | 3.88 | 0.92 |
| kv | η | Gains | |
|---|---|---|---|
| +4WID | 0.1 | 10 | ξ = [0.530, 2.000, 0.200, 1.000, 0.050, 1000.0] |
| +4WIB | 0.1 | 10 | ξ = [0.540, 2.500, 0.130, 1.000, 0.050, 1500.0] |
| +4WID + 4WIB | 0.1 | 10 | ξ = [0.500, 1.500, 0.100, 0.500, 0.050, 2000.0] |
| RWS | 0.1 | 10 | ξ = [0.540, 2.000, 0.300, 1.000, 0.050, 500.0] |
| +4WID | 0.1 | 10 | ξ = [0.530, 2.000, 0.300, 1.000, 0.050, 1000.0] |
| +4WIB | 0.1 | 10 | ξ = [0.510, 2.500, 0.150, 1.000, 0.050, 1500.0] |
| +4WID + 4WIB | 0.1 | 10 | ξ = [0.500, 2.000, 0.100, 1.000, 0.050, 2000.0] |
| RWIS | 0.1 | 10 | ξ = [0.530, 3.000, 0.300, 1.000, 0.050, 500.0] |
| +4WID | 0.1 | 10 | ξ = [0.520, 2.000, 0.200, 1.000, 0.050, 800.0] |
| +4WIB | 0.1 | 10 | ξ = [0.580, 2.700, 0.150, 0.300, 0.050, 800.0] |
| +4WID + 4WIB | 0.1 | 10 | ξ = [0.520, 2.500, 0.200, 1.000, 0.050, 800.0] |
| kv | η | Gains | |
|---|---|---|---|
| +4WID | 0.1 | 10 | ξ = [0.530, 3.000, 0.250, 0.200, 0.050, 0.020, 500.0] |
| +4WIB | 0.1 | 10 | ξ = [0.530, 3.500, 0.300, 0.300, 0.050, 0.010, 500.0] |
| +4WID + 4WIB | 0.1 | 10 | ξ = [0.520, 3.000, 0.300, 0.200, 0.050, 0.020, 500.0] |
| ΔX (m) | ΔY (m) | OS% | ΔDX (m) | ΔSX (m) | MASSA (deg) | Max|ΔMz| (Nm) | |
|---|---|---|---|---|---|---|---|
| +4WID | 2.01 | −0.031 | 0.81 | 8.58 | 4.25 | 0.59 | 2000 |
| +4WIB | 1.97 | −0.029 | 0.24 | 8.15 | 4.63 | 0.57 | 2000 |
| +4WID + 4WIB | 1.98 | −0.036 | 0.75 | 8.74 | 4.61 | 0.59 | 2000 |
| RWS | 1.79 | −0.035 | 0.32 | 8.63 | 5.28 | 0.83 | 595 |
| +4WID | 2.11 | −0.031 | 0.76 | 8.81 | 4.97 | 0.86 | 2000 |
| +4WIB | 2.11 | −0.024 | 0.85 | 8.72 | 4.30 | 0.69 | 2000 |
| +4WID + 4WIB | 2.04 | −0.027 | 0.67 | 8.84 | 4.73 | 0.69 | 2000 |
| RWIS | 2.08 | −0.031 | 0.66 | 8.70 | 4.69 | 0.74 | 574 |
| +4WID | 1.95 | −0.036 | 0.47 | 8.36 | 4.43 | 0.61 | 1428 |
| +4WIB | 2.14 | −0.026 | 0.79 | 8.68 | 5.87 | 3.43 | 1365 |
| +4WID + 4WIB | 2.06 | −0.031 | 0.60 | 8.64 | 4.57 | 0.64 | 1446 |
| IC#4 | ΔX (m) | ΔY (m) | OS% | ΔDX (m) | ΔSX (m) | MASSA (deg) | Max|ΔMz| (Nm) |
|---|---|---|---|---|---|---|---|
| +4WID | 2.09 | −0.021 | 0.62 | 8.42 | 4.35 | 1.57 | 517 |
| +4WIB | 2.01 | −0.031 | 0.60 | 8.48 | 4.33 | 0.44 | 560 |
| +4WID + 4WIB | 2.06 | −0.023 | 0.69 | 8.40 | 4.01 | 1.41 | 520 |
| kv | η | Gains | |
|---|---|---|---|
| FWS | 0.06 | 1 | ξ = [0.820, 0.800, 0.200, 0.300, 1000.0] |
| +4WID | 0.06 | 1 | ξ = [0.730, 0.600, 0.200, 0.100, 1000.0] |
| +4WIB | 0.06 | 1 | ξ = [0.700, 0.600, 0.200, 0.300, 1000.0] |
| +4WID + 4WIB | 0.06 | 1 | ξ = [0.460, 0.400, 0.300, 0.200, 1000.0] |
| 4WS | 0.06 | 10 | ξ = [0.100, 0.050, 0.020, 0.020, 1500.0] κ = [10−4, 10−4, 5 × 10−4, 5 × 10−4, ●, ●, ●, ●] |
| +4WID | 0.06 | 10 | ξ = [0.110, 0.050, 0.050, 0.020, 1500.0] κ = [10−4, 10−4, 5 × 10−4, 5 × 10−4, ●, ●, ●, ●] |
| +4WIB | 0.06 | 10 | ξ = [0.085, 0.050, 0.010, 0.010, 1500.0] κ = [10−4, 10−4, 5 × 10−4, 5 × 10−4, ●, ●, ●, ●] |
| +4WID + 4WIB | 0.06 | 10 | ξ = [0.085, 0.050, 0.010, 0.010, 1500.0] κ = [10−4, 10−4, 5 × 10−4, 5 × 10−4, ●, ●, ●, ●] |
| 4WIS | 0.06 | 1 | ξ = [0.300, 0.300, 0.060, 0.050, 800.0] κ = [10−4, 10−4, 3 × 10−3, 3 × 10−3, ●, ●, ●, ●] |
| +4WID | 0.06 | 1 | ξ = [0.240, 0.240, 0.020, 0.010, 1000.0] κ = [10−4, 10−4, 3 × 10−3, 3 × 10−3, ●, ●, ●, ●] |
| +4WIB | 0.06 | 1 | ξ = [0.200, 0.200, 0.020, 0.030, 600.0] κ = [10−4, 10−4, 3 × 10−3, 3 × 10−3, ●, ●, ●, ●] |
| +4WID + 4WIB | 0.06 | 1 | ξ = [0.160, 0.150, 0.200, 0.016, 1000.0] κ = [10−4, 10−4, 3 × 10−3, 3 × 10−3, ●, ●, ●, ●] |
| ΔX (m) | ΔY (m) | OS% | ΔDX (m) | ΔSX (m) | MASSA (deg) | Max|ΔMz| (Nm) | |
|---|---|---|---|---|---|---|---|
| FWS | 1.15 | −0.016 | 0.59 | 8.48 | 4.46 | 0.59 | 10,524 |
| +4WID | 1.17 | −0.025 | 0.42 | 8.25 | 4.49 | 0.58 | 12,230 |
| +4WIB | 1.12 | −0.005 | 0.19 | 7.69 | 3.92 | 0.57 | 11,448 |
| +4WID + 4WIB | 1.18 | −0.039 | 0.80 | 8.91 | 5.06 | 0.63 | 17,024 |
| 4WS | 1.22 | 0.061 | 0.84 | 8.37 | 3.90 | 0.67 | 18,000 |
| +4WID | 1.27 | 0.040 | 0.85 | 8.49 | 4.39 | 0.66 | 18,000 |
| +4WIB | 0.85 | 0.063 | 0.06 | 7.67 | 3.78 | 0.64 | 18,000 |
| +4WID + 4WIB | 1.22 | 0.042 | 0.80 | 8.65 | 4.81 | 0.66 | 18,000 |
| 4WIS | 1.97 | 0.020 | 0.89 | 9.20 | 4.95 | 0.76 | 18,000 |
| +4WID | 1.00 | −0.005 | -0.01 | 8.16 | 4.87 | 0.75 | 18,000 |
| +4WIB | 1.45 | −0.003 | 0.18 | 8.08 | 5.50 | 1.53 | 18,000 |
| +4WID + 4WIB | 1.42 | −0.009 | 0.82 | 9.23 | 5.40 | 0.78 | 18,000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, M.; Yim, S. Comparative Study on Effects of Input Configurations of Linear Quadratic Controller on Path Tracking Performance under Low Friction Condition. Actuators 2023, 12, 153. https://doi.org/10.3390/act12040153
Park M, Yim S. Comparative Study on Effects of Input Configurations of Linear Quadratic Controller on Path Tracking Performance under Low Friction Condition. Actuators. 2023; 12(4):153. https://doi.org/10.3390/act12040153
Chicago/Turabian StylePark, Manbok, and Seongjin Yim. 2023. "Comparative Study on Effects of Input Configurations of Linear Quadratic Controller on Path Tracking Performance under Low Friction Condition" Actuators 12, no. 4: 153. https://doi.org/10.3390/act12040153
APA StylePark, M., & Yim, S. (2023). Comparative Study on Effects of Input Configurations of Linear Quadratic Controller on Path Tracking Performance under Low Friction Condition. Actuators, 12(4), 153. https://doi.org/10.3390/act12040153