1. Introduction
Permanent magnet synchronous motor (PMSM) is widely used in civil engineering, aerospace, and industry owing to its simple structure and excellent control performance. The control of PMSM usually used the traditional PID controlled with simple structure. However, the performance of PID control is highly relied on an accurate system model, which makes it easily affected by external disturbances or motor parameters perturbation. Several control algorithms are developed in recent years to improve the control performance of PMSM, such as adaptive control [
1,
2], optimal control [
3], backstepping control [
4], fuzzy control [
5,
6], sliding mode control (SMC) [
7,
8] and model predictive control [
9] Sliding mode control is widely used in PMSM, which does not involve precise mathematical models and is highly insensitive to external noise disturbances and motor parameters perturbations. However, the reaching laws used in traditional sliding mode control are equal reaching law, exponential reaching law, and power reaching law, which causes reaching rate of the controller too slow to converge in finite time, sometime generates jitter. Additionally, the parameters of the traditional sliding mode control are tuned independently based on tuning methods such as the trial-and-error method and the empirical method, which leads to low tuning efficiency and large errors.
To solve the problems of slow reaching rate and jitter in the traditional sliding mode control, Y Li et al. [
10] proposed an improved fast variable power reaching law by adding a variable exponential term to the original fast double power reaching law, which improves the reaching rate of the system and limits the jitter phenomenon with finite converge time. C Chen et al. [
11] introduced the variable containing the stator current estimation information as the gain of the isokinetic reaching term in the traditional exponential reaching law, so that the sliding mode observer adaptively adjusts the convergence rate with the change of the system state and improves the steady-state performance. E L Kang et al. [
12] designed a non-singular fast terminal sliding mode surface by combining a nonlinear function with a linear function to achieve a fast convergence of the system error at different stages. To further improve the anti-interference capability of the control system, L Z Qu et al. [
13] estimated the total system disturbance with an extended state observer and compensated it to the sliding mode speed controller, which improved the speed tracking performance and anti-disturbance robustness of the controller under different disturbances such as internal parameter changes and external load changes, while maintaining a fast dynamic response. E Lu et al. [
14] proposed a second-order non-singular terminal sliding mode observer that estimates the external load disturbances of the controller and improves the anti-interference capability of the system.
Several optimal algorithms are proposed by researchers in recent years to solve the difficulty of sliding mode parameters tuning. R Y Zhang et al. [
15] used an improved particle swarm algorithm based on the Corsi variant to optimize the parameters of the PMSM vector control speed loop PI controller, which improved speed control accuracy significantly. J Z Yan et al. [
16] performed online self-tuning and optimization of PID controller parameters by combining the reward of reinforcement learning, experience playback mechanism, and dynamic performance index evaluation module of the control system, which simplified the tuning process, reduced the overshoot of the controlled quantity and improved the dynamic response performance of the controller effectively compared to the traditional method. L Z Feng et al. [
17] proposed an optimization algorithm for Drosophila based on a dual drive of multiple repellents and multiple lures. The PID controller with the above parameter tuning method has the advantages of small error, fast response time, and high stability, compared with other optimization algorithms. L Q Xiao [
18] proposed a method based on an improved genetic algorithm to tune the PID controller parameters, which improves the convergence speed and accuracy compared to the ordinary genetic algorithm and can increase the probability of convergence to the optimal value. Tran H K et al. [
19] proposed an improved genetic algorithm that speeds up convergence and saves operation time by ignoring the chromosome decoding step and uses the integral of squared error (ISE) as the fitness function for finding the optimal values of the fuzzy PID control parameters. However, the above tuning methods are mostly applied in PI or PID controller parameters, which are unsuitable for sliding mode control of PMSM.
A nonlinear reaching law sliding mode control (NRLSMC) is proposed in this paper, to solve the above problems in traditional sliding mode control, such as slow reaching rate and jitter. In addition, an extended state observer (ESO) is introduced in the proposed controller to further improve the anti-interference capability of the control system. The external disturbances observed by the ESO can be used to compensate for the NRLSMC speed controller. Meanwhile, an improved genetic algorithm (IGA) is used to tune the parameters of NRLSMC. The IGA can adaptively change with the fitness value compared to the normal GA [
20,
21], which can effectively reduce the probability of falling into a local optimal solution and increase the convergence speed. Finally, the performance of NRLSMC is numerically simulated in MATLAB/Simulink, and validated through experiments on a rapid control prototype (RCP) experimental platform based on dSPACE 1202 [
22,
23,
24]. Both simulation and experimental results show that the controller can make the PMSM control system with the advantages of no overshoot, fast response, and strong robustness.
3. Design of Sliding Mode Speed Controller
3.1. Nonlinear Reaching Law
The reaching law is the key factor that affects the performance of the sliding mode speed controller. Appropriate reaching law can increase the reach rate to the sliding mode surface and suppress the jitter problem inherent in the sliding mode effectively.
The three types of traditional reaching laws used in sliding mode control are listed below:
- 2.
Exponential reaching law:
- 3.
Rapid power reaching law:
The traditional reaching laws cannot realize rapid reaching rate and jitter weakening simultaneously, which results in poor controller control performance. To solve the above problems in the sliding mode controller, a nonlinear reaching law is designed as below:
where
s is the sliding mode surface;
x1 is the state variable,
;
ε > 0, 0 <
α < 1,
k > 0,
β > 0.
From Equation (8), it can be seen that when the system is far from the sliding surface, s is larger, where plays a major role, and due to the adding of the exponential term , the reaching rate is effectively enhanced, which can make the system reaching the sliding mode surface faster. When the system is close to the sliding mode surface, s is smaller, where plays a major role, and , tends to 0, and tends to 0 faster than the power reaching law, which effectively weakens the jitter. Meanwhile, the coefficient β is introduced to adjust the reaching rate of the system when s changes to fit various systems; the state variable x1 is introduced to suppress the jitter generated by the exponential term.
3.2. Performance of Nonlinear Reaching Law
Taking the linear system shown in Equation (9) as an example, the control performance is analyzed for the power-reaching law, exponential reaching law, rapid power-reaching law, and the nonlinear reaching law designed in this paper, respectively.
Define the sliding mode surface function:
Derivative of Equation (10):
According to Equations (8), (9), and (11), the nonlinear reaching law controller function is obtained as follows:
where
,
x1,
x2 is the control system state variable;
u is the control system control variable;
A,
B,
C is the control system constant matrix.
The four reaching laws control system constant matrices involved in the comparison are all defined as
,
,
[
25,
26]; the initial state variables of the control system are all defined as
; the four reaching laws coefficients are shown in
Table 1.
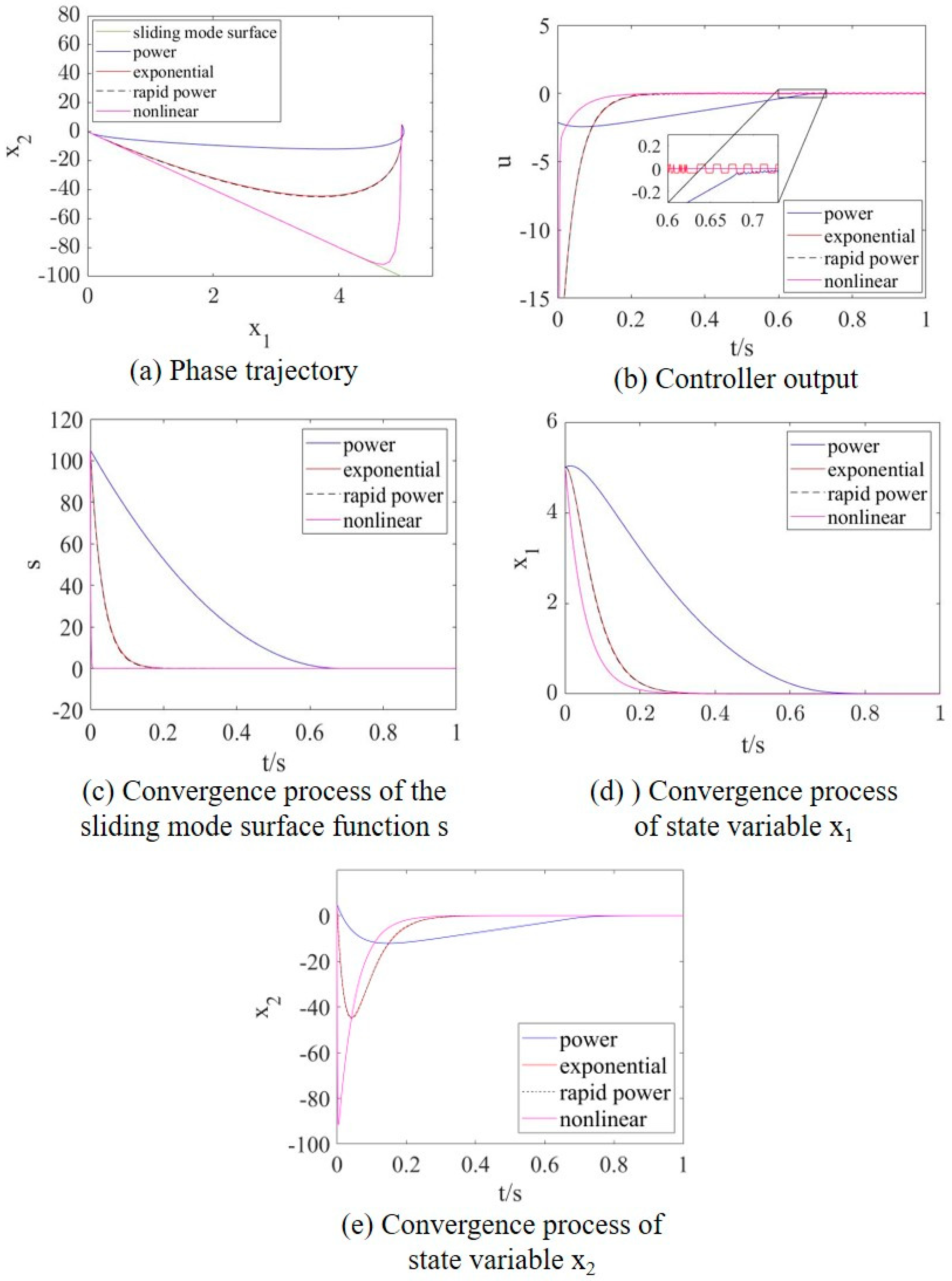
The simulation results of the control performance of the four reaching laws are shown in
Figure 1.
As shown in
Figure 2a, the nonlinear reaching law can make the system reach the sliding mode surface faster than the other three reaching laws. As shown in
Figure 2b, the controller output of the nonlinear reaching law reaches a steady state fastest without jitter, compared to other reaching laws. The convergence process of the sliding mode surface function
s and state variables
x1,
x2 are shown in
Figure 2c–e. It can be seen that the nonlinear reaching law sliding mode surface function and state variables have the fastest convergence speed compared with the other three reaching laws. Therefore, the nonlinear reaching law designed in this paper can effectively improve the reaching rate and weaken the sliding mode jitter simultaneously.
3.3. Sliding Mode Speed Controller Design Based on Nonlinear Reaching Law
According to Equations (1), (3), and (4), and
ωe =
npωm, when the control method with
id = 0 is used, we can get:
Define the state and control variables of the PMSM control system:
where
ωref is the reference angular speed of the motor.
According to Equations (14) and (15), we can get:
Let
, then the state equation of the control system is:
Define the sliding mode surface function:
Derivative of Equation (18):
The output of the sliding mode speed controller with nonlinear reaching law can be obtained according to Equations (8), (15), and (19), such as:
where
iq* is the
q-axis reference current;
c > 0,
ε > 0, 0 <
α < 1,
k > 0,
β > 0.
3.4. Proof of Stability
Theorem 1. For the state and control variables of the PMSM control system shown in Equation (15), selecting the sliding mode surface shown in Equation (18), and selecting the nonlinear reaching law shown in Equation (8), the designed sliding mode speed controller Equation (20) is asymptotically stable.
Proof . Select the Lyapunov function:
Derivative of Equation (21):
Substituting Equation (8) into Equation (22), we can get:
when and only when
s = 0,
.
Therefore, the designed nonlinear reaching law satisfies the sliding mode reachability condition, that is, the sliding mode speed controller is asymptotically stable. □
Discretization of nonlinear reaching law sliding mode speed controller.
To transform the continuity problem into the discrete problem that the computer can handle in the rapid control prototype experiment, the nonlinear reaching law sliding mode speed controller needs to be discretized.
Consider the following discrete linear system free of uncertainties and perturbations:
where
.
According to Equation (17), we can know the equation of state of the control system as:
where
,
,
.
The first order Euler discretization of Equation (25) gives:
where
T is the sample period.
From Equation (26), we can obtain:
Then, according to Equation (24) we can get: A = TA1 + E, b = Tb1.
Define the discrete sliding mode surface function:
where
.
According to Equations (24) and (28), we can obtain:
The nonlinear reaching law can be discretized as follows:
According to Equations (29) and (30), we can obtain:
From Equation (31), the discretized nonlinear reaching law sliding mode speed controller function is obtained as:
where
Then, the output of the discretized nonlinear reaching law sliding mode speed controller is:
4. Extended State Observer and Its Stability Proof
ESO is introduced in the NRLSMC speed controller to further improve the anti-interference capability of the control system. The ESO can observe the external disturbances of the system, and the observed total disturbances are used to compensate for the nonlinear reaching law sliding mode speed controller.
Considering the total disturbance
d(
t) from parameter uncertainty, load torque, external disturbance torque and
q-axis current tracking error suffered by the speed loop, Equation (14) can be rewritten as:
The following state variables are defined:
According to Equations (34) and (35), the extended state system is obtained as follows:
where Δ(
t) is the rate of change of
d(
t).
The linear ESO of the system can be designed according to Equation (36):
where
γ is the ESO parameter to be designed,
γ > 0;
e1(
t) is the
ωm observation error;
e2(
t) is the
d(
t) observation error;
z1(
t) is the
ωm observation value;
z2(
t) is the
d(
t) observation value.
The total disturbance
z2(
t) observed in Equation (37) is compensated into the designed nonlinear reaching law sliding mode speed controller, and according to Equation (20), the output of the nonlinear reaching law sliding mode speed controller is:
The parameter γ of the ESO to be designed determines the bandwidth of the ESO, but the too-large value of γ can increase the observation noise. Therefore, the value of γ should be balanced between bandwidth and noise.
Defining the expanded state system:
Rewrite Equation (39) as a system of state matrix equations and let
iq = u.
where
,
,
,
.
Construct the full-dimensional state observer of the system as follows:
where
is the gain matrix.
Denote the ESO estimation error as
. The error state matrix equation is obtained by subtracting Equation (40) from Equation (41):
where
, then the characteristic polynomial of the error state matrix equation is:
It is known that
,
, then
,
. When
is bounded and the ESO is known to be stable according to the Routh Criterion [
27].
5. Parameter Tuning of Sliding Mode Speed Controller
5.1. Design of IGA
To obtain satisfactory dynamic characteristics of the transition process, the absolute value of the error time integration performance index is used as the minimum target function
J for parameter selection, and the squared term of the controller input is added to the function to prevent excessive control, and to avoid overshoot: if the system produces overshoot, the amount of overshoot is used as one of the optimal indexes.
where
e(
t) is the system error;
e(
y(
t)) =
y(
t) −
y(
t − 1) is the system output error,
y(
t) is the system output;
u(
t) is the control input;
tu is the rise time;
ω1,
ω2,
ω3,
ω4 are weights,
ω4 >> max (
ω1,
ω2,
ω3); the fitness function
f = 1/
J.
The parameters of the NRLSMC speed controller such as
c,
ε,
α,
k,
β are tuned by the improved genetic algorithm proposed in this paper. Normal genetic algorithm is able to perform global optimization because it relies on crossover and mutation to continuously generate new individuals while selecting newly generated offspring and parental individuals for survival. However, its crossover and mutation probabilities are preset constant values. When the set crossover probability is too large, too many individuals in each generation will change, which is not conducive to search. When the set mutation probability is too small, it is not easy to generate new individuals, thus making the genetic algorithm blind and irregular. According to the characteristics of crossover and mutation probabilities, a new adaptive improved genetic algorithm is designed in this paper, and the crossover and mutation probabilities of this improved genetic algorithm can change adaptively with the fitness value, and its crossover probability
Pc and mutation probability
Pm are:
where
Pc1 = 0.9,
Pc2 = 0.6,
Pm1 = 0.1,
Pm2 = 0.001;
f′ is the fitness of the individual with larger fitness in the crossover operation;
f is the fitness of the individual in the mutation operation;
fmax and
fmin are the maximum and minimum fitness in each generation of individuals;
favg is the average fitness of each generation of individuals.
According to Equations (45) and (46), it is known that individuals with higher fitness in each iteration will be given lower Pc and Pm values, which is beneficial to the preservation of good individuals; individuals with lower fitness will be given higher Pc and Pm values, which is a benefit to the change of inferior individuals and improves the convergence speed of the algorithm. Because the fitness of individuals involved in crossover and mutation operations is random, the crossover and mutation probabilities of individuals are also random according to Equations (45) and (46), which improves the randomness of the algorithm and effectively solves the situation that ordinary genetic algorithms are easy to fall into local optimal solutions.
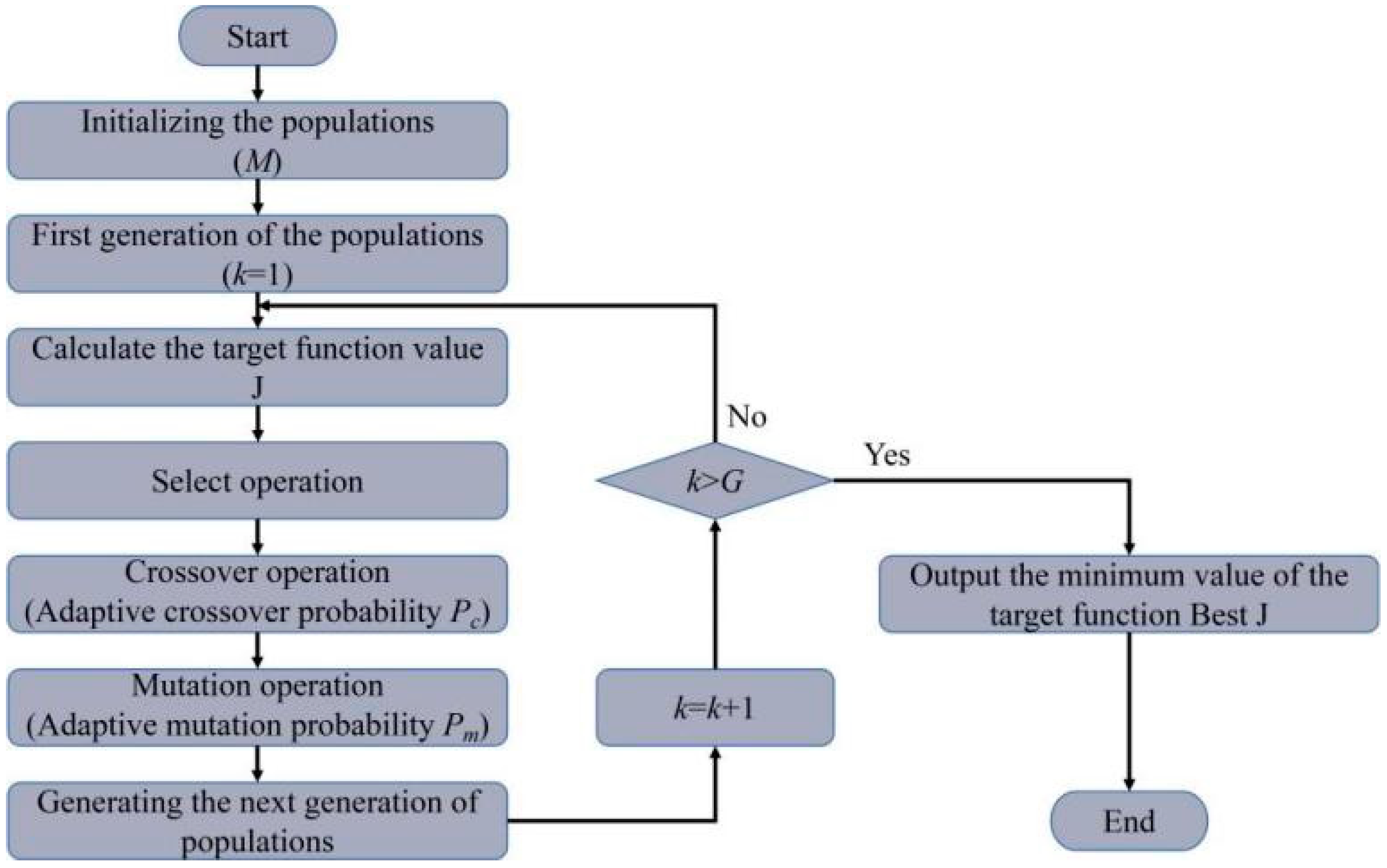
The flowchart of the improved genetic algorithm is depicted in
Figure 3. This algorithm involves designing a fitness function, determining the initial population size, calculating the target function value for each individual, and iterating through selection, crossing, and mutation operations. The algorithm halts when the number of iterations surpasses a pre-defined threshold and outputs the minimum value of the target function from the final iteration.
The improved genetic algorithm has the following three operational parameters that need to be set in advance:
5.2. Modeling of Speed Loop
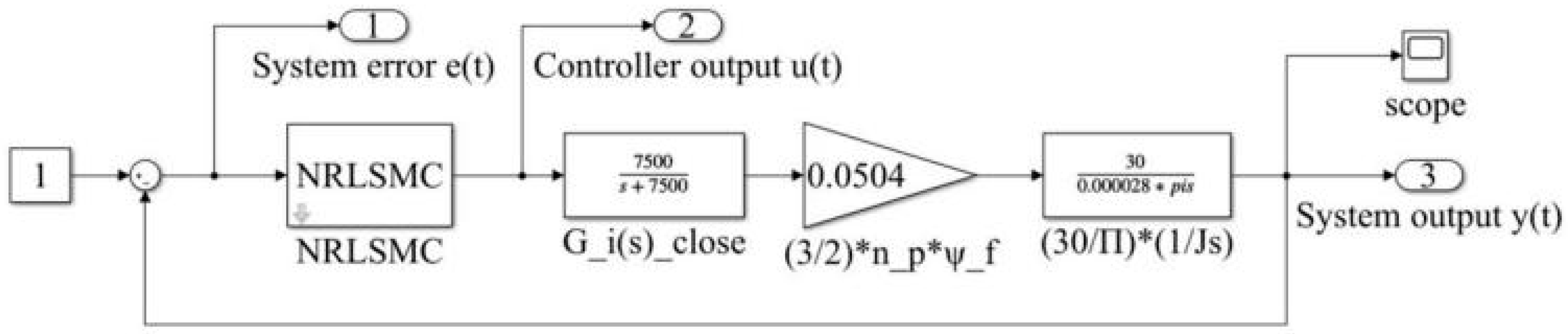
The parameter tuning method is an improved genetic algorithm combined with the PMSM nonlinear reaching law sliding mode control system speed loop MATLAB/Simulink simulation model. Hence, the speed loop simulation model of the system needs to be established as below.
Figure 4 shows the speed loop of the PMSM nonlinear reaching law sliding mode control system. As shown in
Figure 4, to establish the system speed loop simulation model, we need to derive the system
q-axis current loop closed-loop transfer function
Gi(
s)
close first. The
q-axis current loop adopts the PI controller, and the closed-loop transfer function is:
The
q-axis current loop consists of PI controller,
PWM inverter and motor armature circuit, let the parameter
Kp =
τiKi in PI controller, the current loop open loop transfer function can be obtained as follows:
where
KPWM is the
PWM inverter gain and
Ts is the
PWM wave period.
Letting
τi =
Lq/
RS and
KPWM = 1, Equation (48) can be transformed into:
According to Equations (47) and (49), the current loop closed-loop transfer function can be obtained as:
From the general form of the transfer function of the second-order system, we can get:
The
q-axis current loop including in the speed loop can be considered as a first-order link, which can be obtained from Equations (50) and (51):
Since the second-order system performs best at the damping ratio
ζ = 0.707, and the PWM wave period is set to
Ts = 1/15,000 s, the current loop closed-loop transfer function is:
According to the actual motor parameters chosen
np = 4,
ψf = 0.0084 Wb,
J = 0.000028 kg·m
2, we can get:
As shown in
Figure 5, the speed loop of the PMSM nonlinear reaching law sliding mode control system MATLAB/Simulink simulation model can be constructed:
5.3. Parameter Tuning
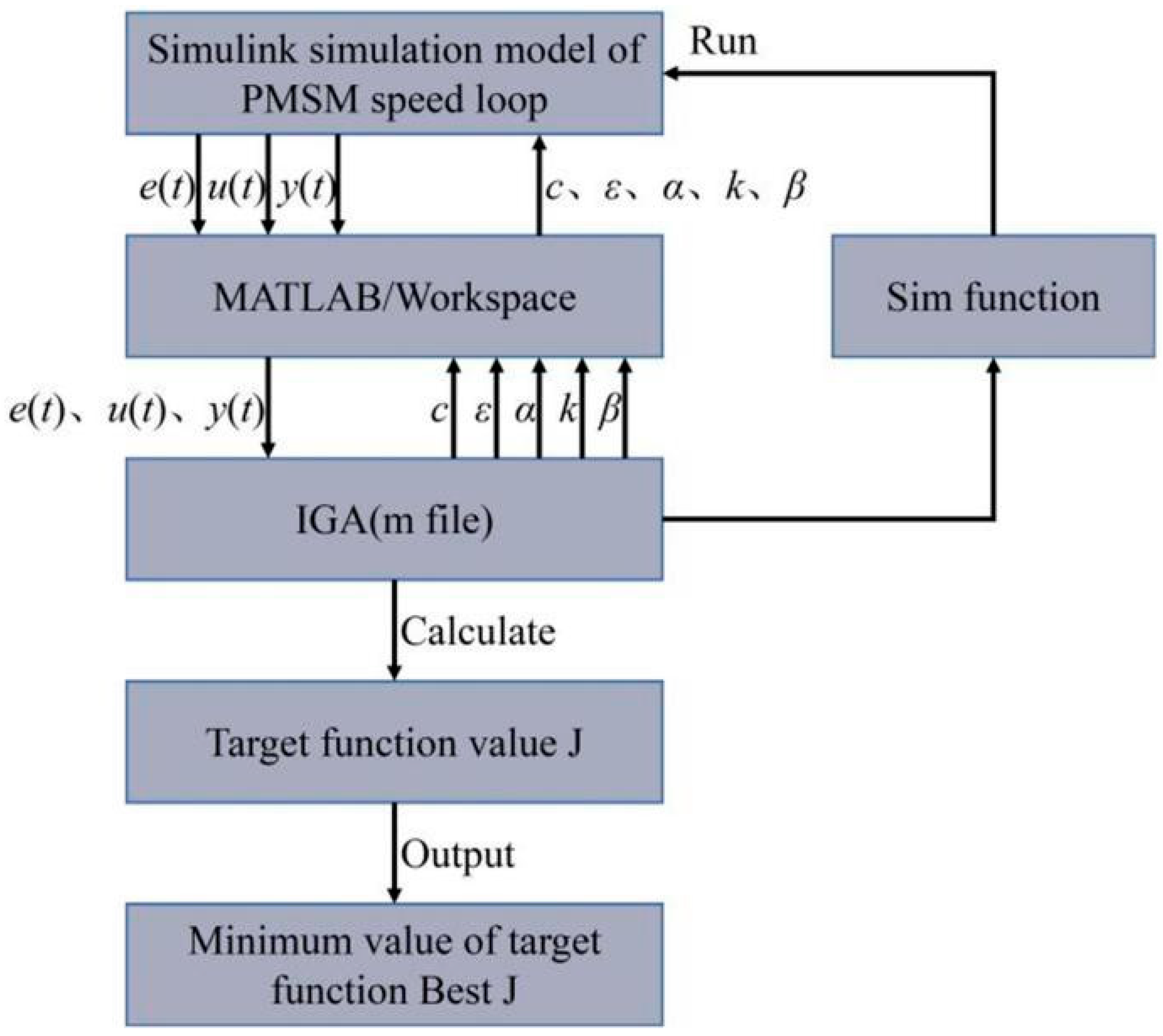
Figure 6 shows the schematic diagram of the IGA combined with the Simulink simulation model. In the IGA, M groups of
c,
ε,
α,
k, and
β are generated randomly in a specified range, which is tuned and stored in the workspace. Then, the Simulink model calls the M groups of parameters in the workspace and runs the model by sim function. The system error
e(
t), control input
u(
t), and system output
y(
t) obtained after running are stored in the Workspace, and the IGA calls
e(
t),
u(
t) and
y(
t) in the Workspace to calculate the M groups of target function values J. The above process is iterated until the best J is obtained.
Set the operating parameters of IGA: M = 50, E = 5, G = 150; the weights of the fitness function: ω1 = 0.999, ω2 = 0.001, ω3 = 2.000, and ω4 = 100; the setting of the range of values of the parameters to be tuned directly affects the iteration speed and global search ability of the algorithm, too large range will cause the algorithm iteration speed to be too slow, too small a range will cause the algorithm to fall into local optimal solutions. After repeated debugging, a group of satisfactory ranges of values for the parameters to be tuned are derived: c ϵ (100, 300), ε ϵ (0, 30), α ϵ (0, 1), k ϵ (0, 150), and β ϵ (0, 0.01).
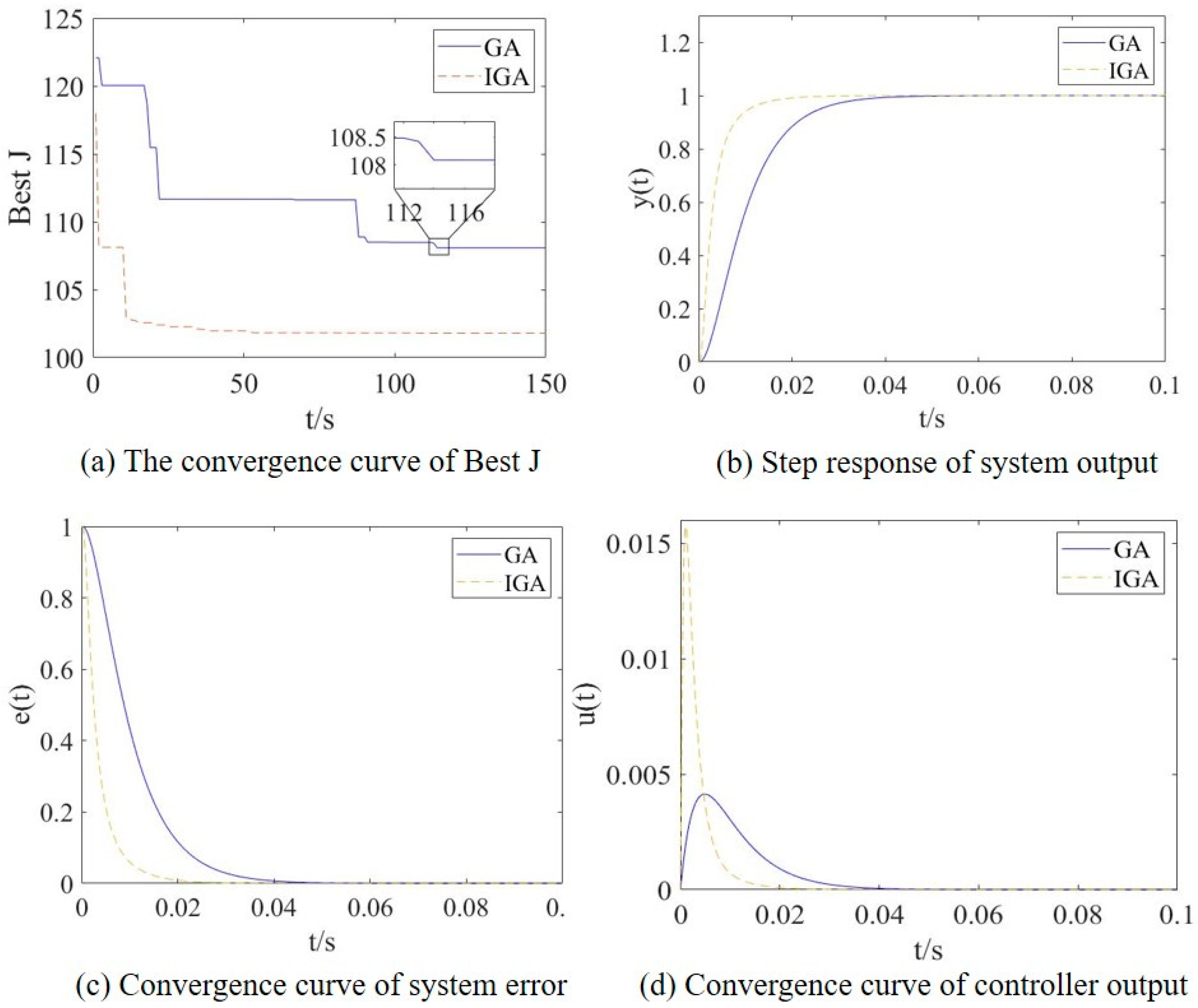
Figure 7 shows the comparison of GA and IGA under the same operating parameters, in which, the crossover and mutation probabilities of the normal GA are set as
Pc = 0.9 and
Pm = 0.1, respectively. As shown in
Figure 7a, the convergence speed of the best J of IGA is faster than GA. The best J converges at 101.8056 after 53 generations with IGA, while at 108.0853 after 114 generations with GA, which means the possibility of falling into the local optimal solutions is avoided effectively in IGA. As shown in
Figure 7b, the response time of system output
y(
t) in IGA is short than in GA. As shown in
Figure 7c,d, the convergence speed of system error
e(
t) and control input
u(
t) in IGA is faster than GA. Therefore, the IGA has a faster convergence speed and better global search capability compared with GA. When the number of iterations reaches 150, the optimal values of the parameters of the nonlinear reaching law sliding mode speed controller corresponding to the minimum value of the target function output by the improved genetic algorithm are
c = 296.1473,
ε = 29.3112,
α = 0.9678,
k = 144.1718, and
β = 0.0095.
6. Simulation Modeling and Results Analysis
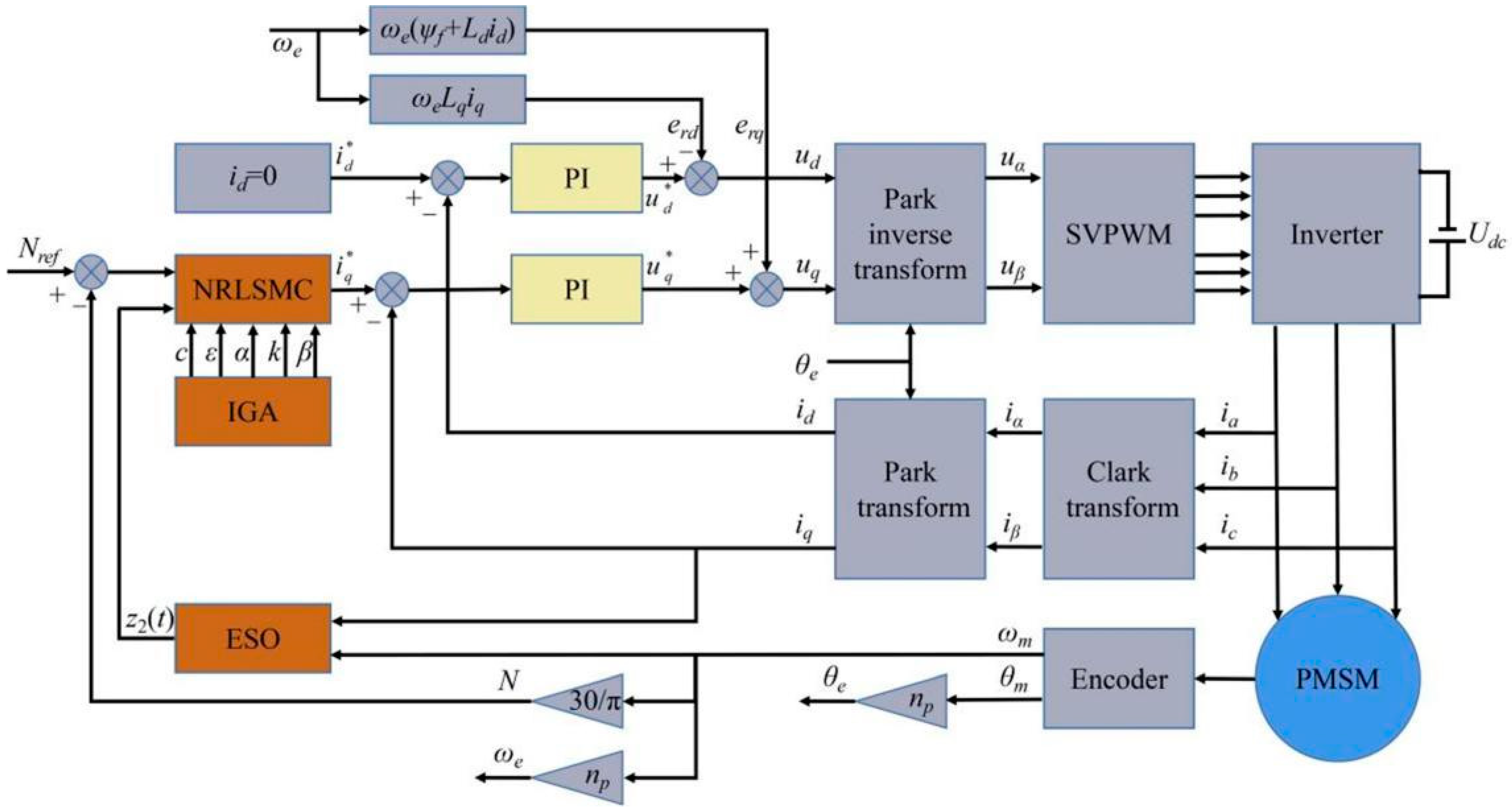
A numerical model of the control system shown in
Figure 8 was built by MATLAB/Simulink in order to verify the performance of the nonlinear reaching law sliding mode speed controller based on IGA and ESO (IGA-NRLSMC+ESO). Numerical simulations are conducted based on the above model compared with the traditional PID speed controller (PID), the exponential reaching law sliding mode speed controller (SMC), and the nonlinear reaching law sliding mode speed controller based on ESO (NRLSMC+ESO).
The motor parameters set in the simulation are the same as the actual motor parameters, as shown in
Table 2.
The parameters of the four-speed controllers involved in the comparison are shown in
Table 3, and the parameters of their control system current loop PI controllers are all the same, as shown in
Table 4.
Simulation conditions are set: bus voltage
Udc = 24 V, PWM switching frequency
f = 15 kHz, sample period
Ts = 1 × 10
−6 s, ode23tb solver is used, the relative error is set to 1 × 10
−6, simulation time is set to 1 s, given speed
Nref = 1000 rpm, the motor is started at no load, 0.2 N·m load is applied at 0.5 s, and speed increases to 1200 rpm at 0.8 s. The simulation results are shown in
Figure 9,
Figure 10,
Figure 11,
Figure 12,
Figure 13,
Figure 14 and
Figure 15.
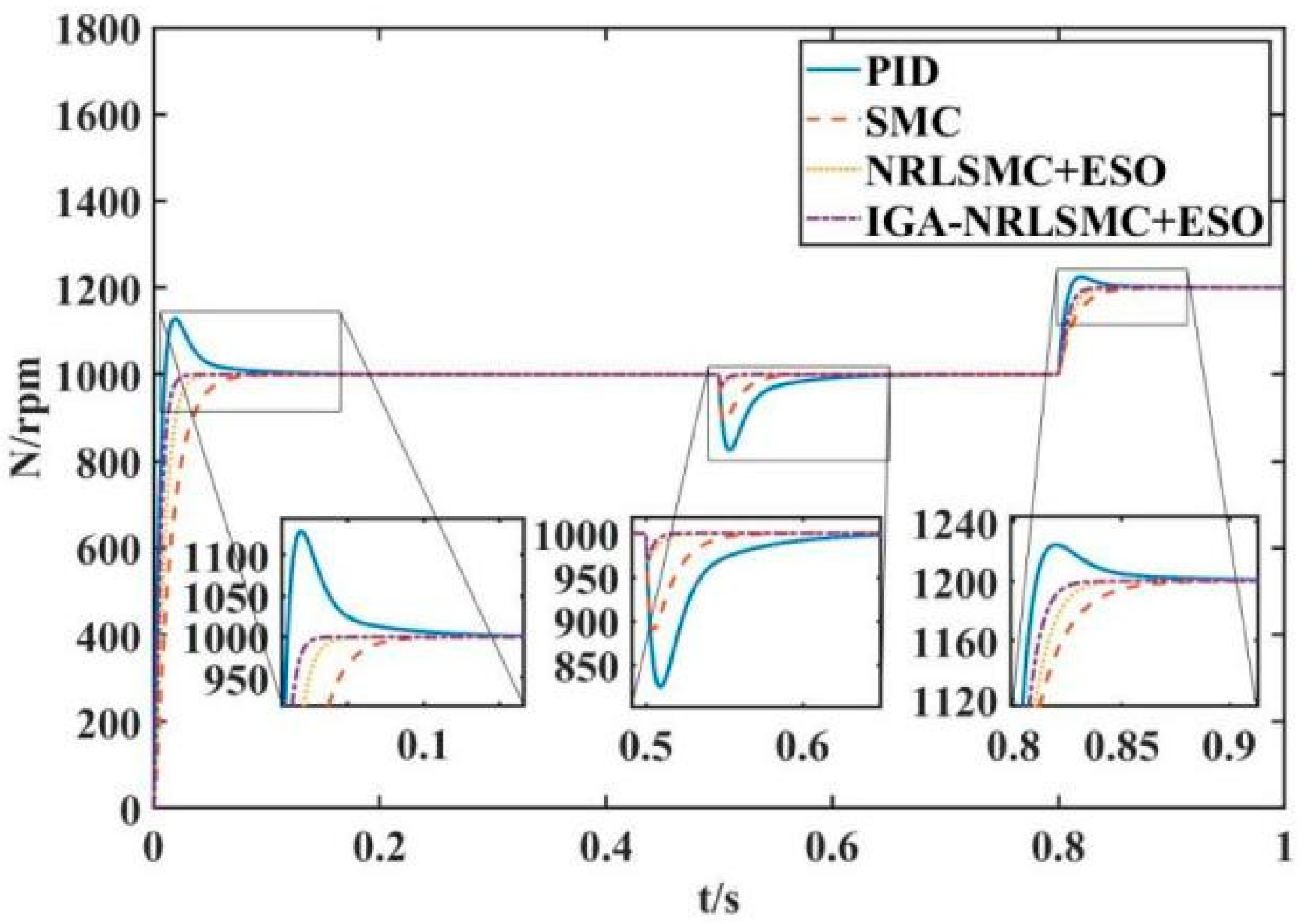
The speed curves for the four-speed controllers are shown in
Figure 9. According to the speed comparison presented in
Table 5, the IGA-NRLSMC+ESO speed controller’s curve exhibits no overshoot during startup and the shortest response time of 0.035 s. This response time is 0.125 s, 0.065 s, and 0.02 s faster than the response times of the other three controllers, respectively. When a load of 0.2 N·m is applied at 0.5 s, the IGA-NRLSMC+ESO controller demonstrates the shortest adjustment time of 0.02 s while maintaining the lowest decline. This adjustment time is 0.16 s, 0.06 s, and 0.01 s less than the adjustment times of the other three controllers, respectively. Even when the speed is increased to 1200 rpm at 0.8 s, the IGA-NRLSMC+ESO controller’s curve remains free of overshoot and exhibits the shortest adjustment time of 0.035 s. This adjustment time is 0.085 s, 0.045 s, and 0.015 s less than the adjustment times of the other three controllers, respectively.
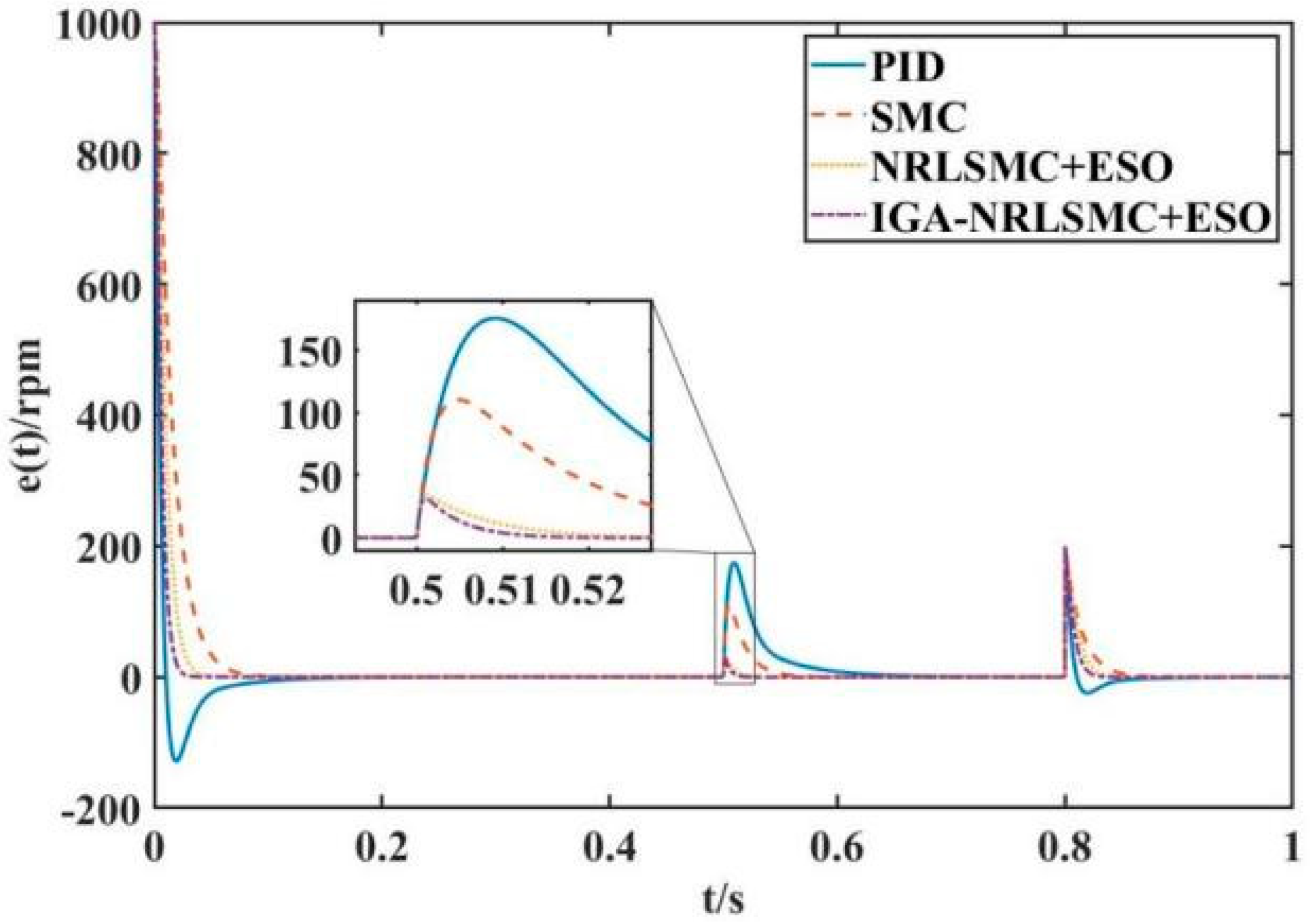
Figure 10 illustrates the speed error curves for the four-speed controllers.
Table 6 compares the speed error, demonstrating that all controllers exhibit speed errors of 1000 rpm and 200 rpm during startup and speed increase, respectively, due to the set speed being 1000 rpm and 1200 rpm. When the load is applied at 0.5 s, the IGA-NRLSMC+ESO speed controller displays the smallest speed error of 32 rpm, which is 143 rpm, 78 rpm, and 2 rpm less than the speed errors of the other three controllers.
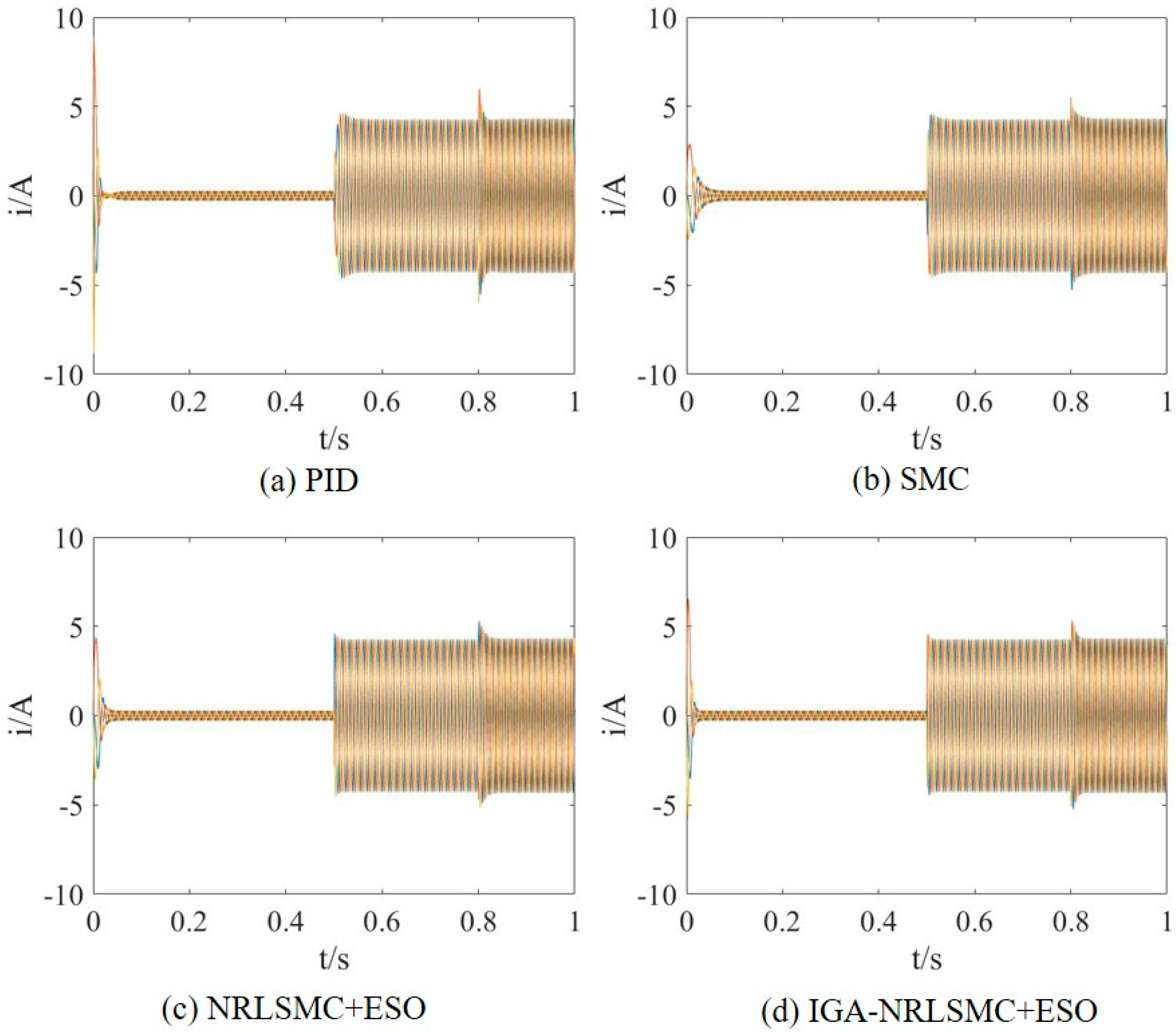
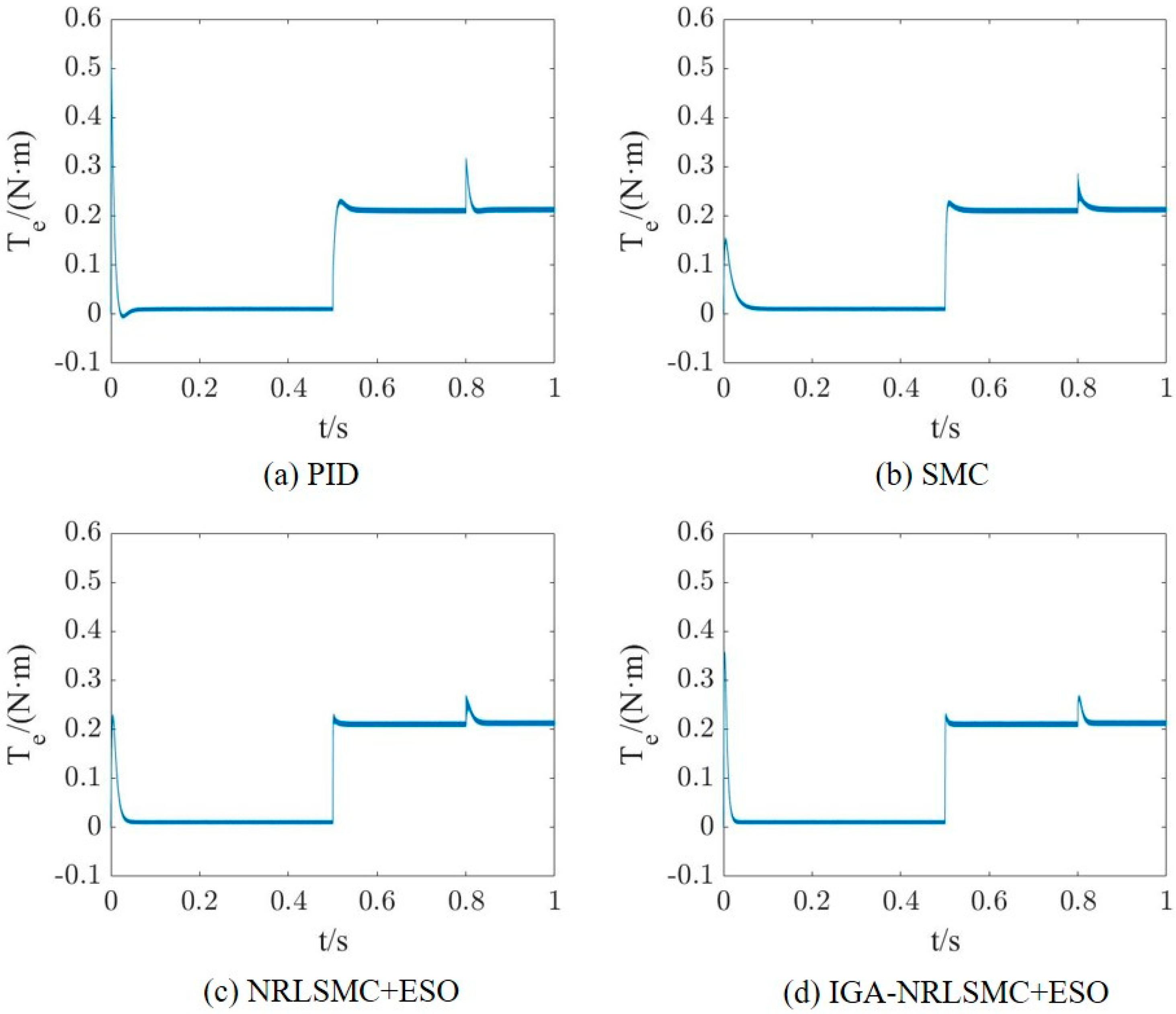
Figure 11 and
Figure 12 display the three-phase current curves and torque curves, respectively, obtained for the four-speed controllers. The response time and adjustment time for the three-phase current and torque during startup, load application, and speed increase are equivalent to those of the speed.
Table 7 compares the three-phase current and torque, indicating that the IGA-NRLSMC+ESO speed controller achieves steady-state values for the current and torque curves faster than the other three controllers during startup, load application, and speed increase.
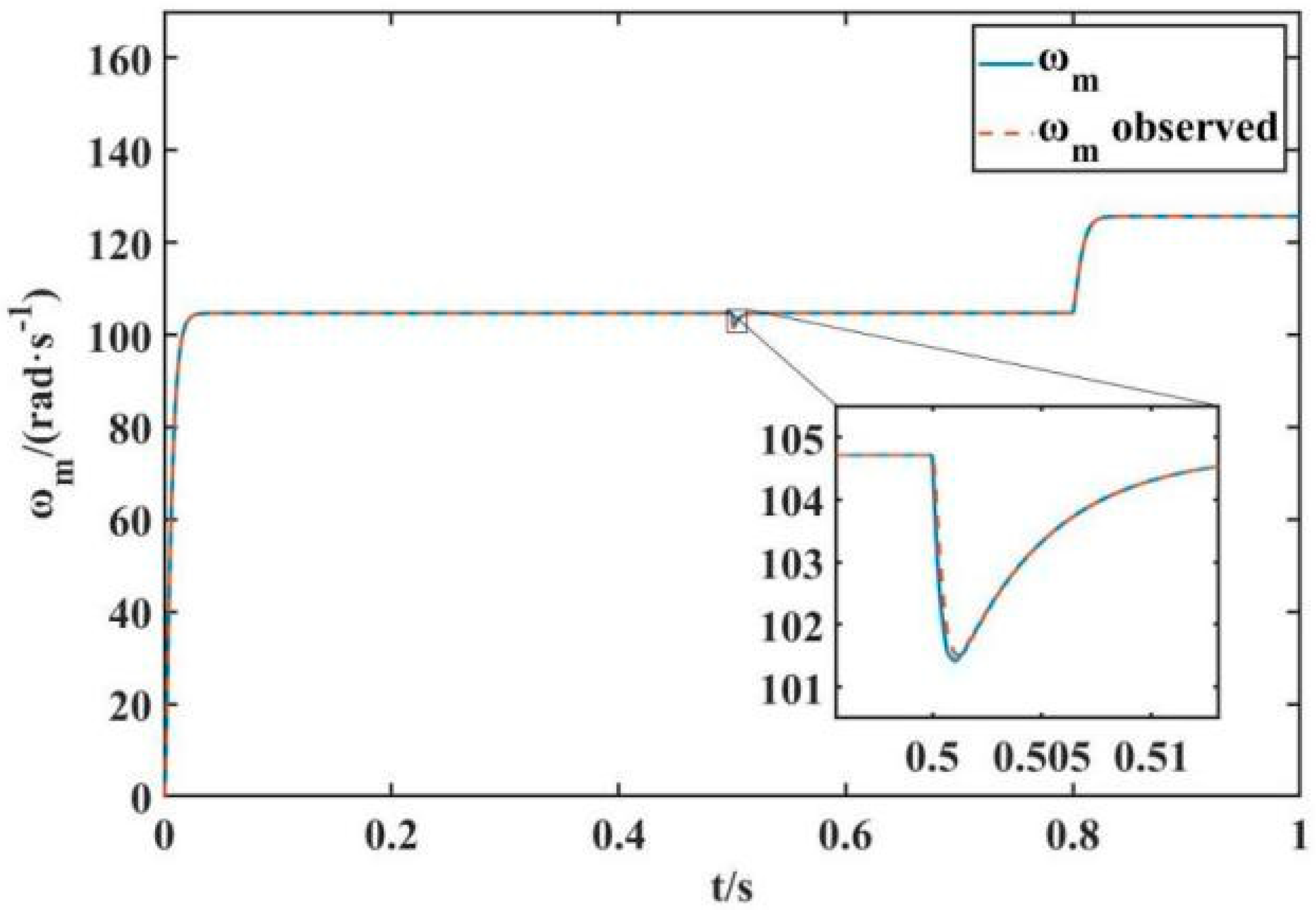
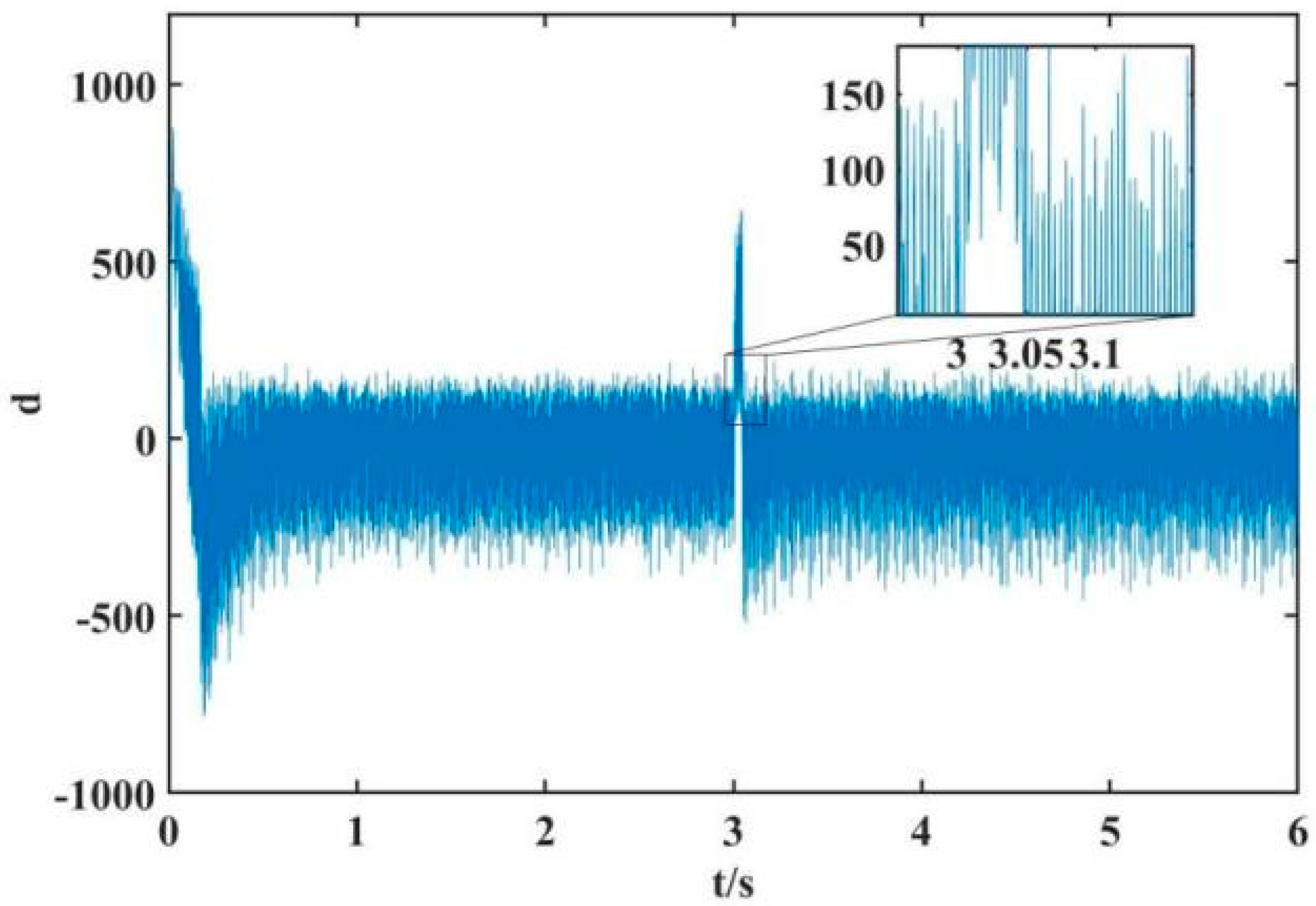
Figure 13 displays the observed
ωm curve for IGA-NRLSMC+ESO, which achieves fast tracking when the load is suddenly increased, exhibiting an observed error of 0.657 rad/s and a response time of 0.0035 s, as demonstrated in
Figure 14. Furthermore, the IGA-NRLSMC+ESO total disturbance observed curve in
Figure 15 demonstrates that the system can rapidly estimate changes in total disturbance, with a response time of 0.0035 s when the load changes at 0.5 s. Hence, by incorporating ESO, the control system’s anti-interference capability is further improved.
Therefore, according to the simulation results of the four-speed controllers, it can be concluded that the PMSM control system with IGA-NRLSMC+ESO has the advantages of no overshoot, fast response, and strong robustness compared to PID, SMC, and NRLSMC+ESO.
7. Experimental Verification
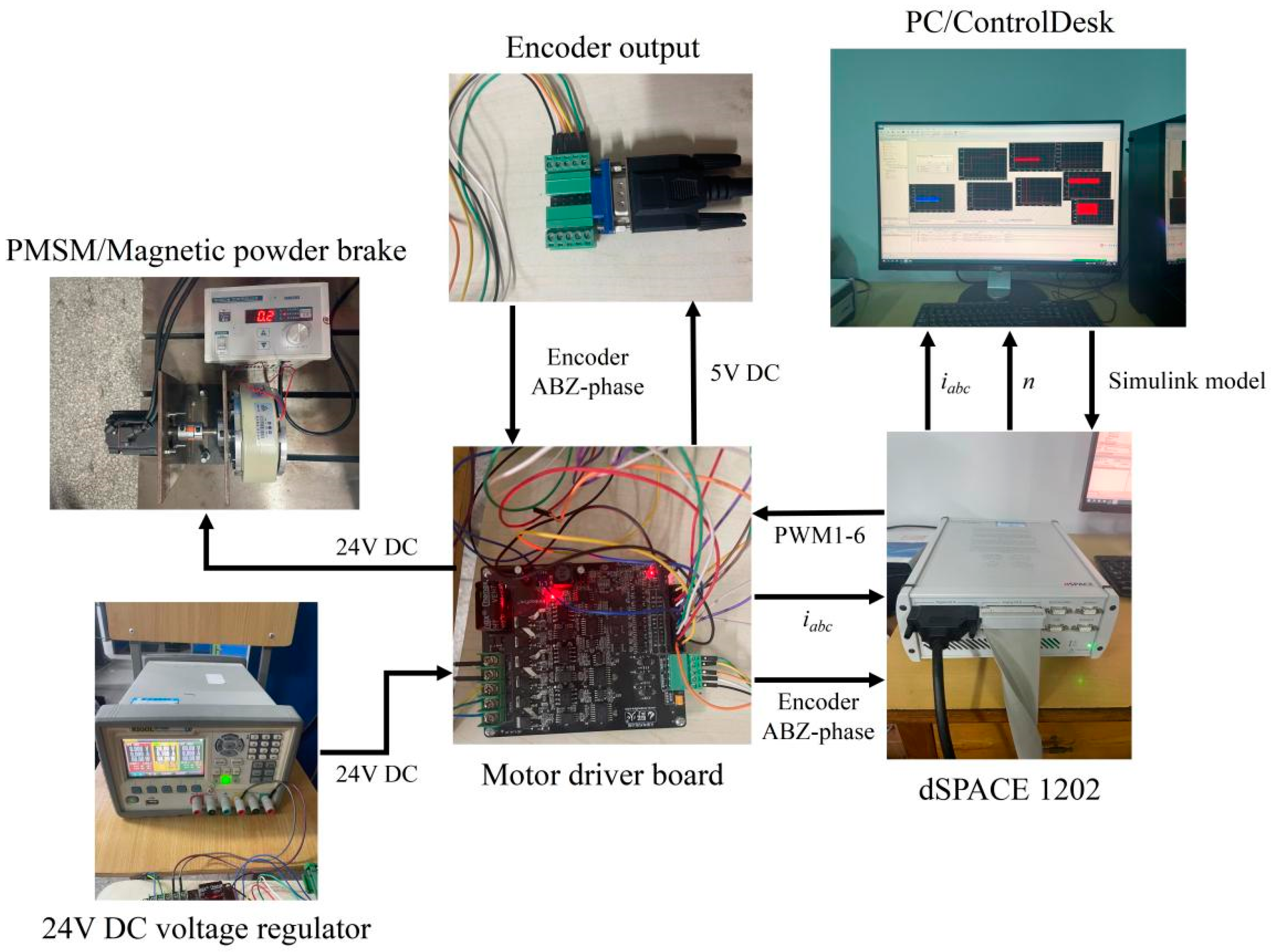
To verify the performance of IGA-NRLSMC+ESO, an RCP experimental platform is established using dSPACE 1202, as depicted in
Figure 16. The platform comprises a PC, dSPACE 1202, a motor driver board, a PMSM, a 1000-line optical encoder, and a 24V DC voltage regulator. The PMSM control system’s RCP model is developed in MATLAB/Simulink and compiled into C code, which can be executed on the dSPACE 1202. The dSPACE 1202 is connected to the motor drive board and the optical encoder signal output interface, following the RTI module’s interface in the RCP model. During motor operation, experimental data can be monitored in real-time through ControlDesk on the PC, allowing for online parameter adjustments.
The motor parameters used in the experiment are shown in
Table 2, and the controller parameters are set the same as the simulation. The experimental condition 1 is the speed step condition where the initial given speed is 1000 rpm and the speed increases to 1200 rpm after 3 s. The experimental results are shown in
Figure 17,
Figure 18,
Figure 19,
Figure 20,
Figure 21 and
Figure 22.
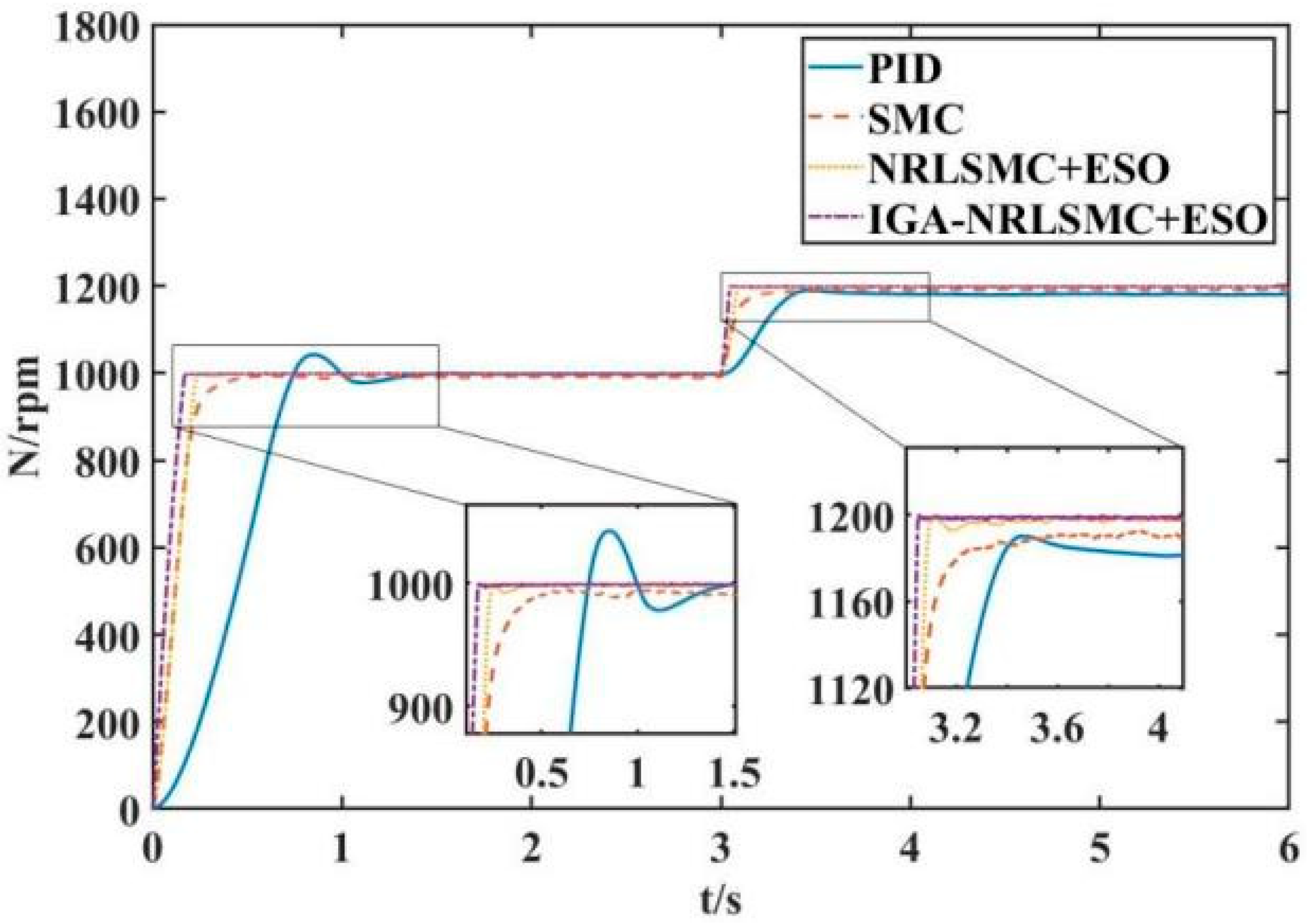
The speed curves obtained from the experiments with four different speed controllers are shown in
Figure 17. Based on the experimental speed comparison presented in
Table 8, it can be observed that the speed curve obtained by IGA-NRLSMC+ESO has the shortest response time of 0.17 s, which is 1.41 s, 0.47 s, and 0.08 s less than the other three speed controllers, respectively, with no overshoot. Furthermore, when the speed steps to 1200 rpm after 3 s, there is still no overshoot, and the adjustment time is the shortest at 0.05 s, which is 0.98 s, 0.57 s, and 0.06 s less than the other three speed controllers, respectively. Therefore, IGA-NRLSMC+ESO has the advantages of no overshoot, fast response, and strong robustness compared to PID, SMC, and NRLSMC+ESO.
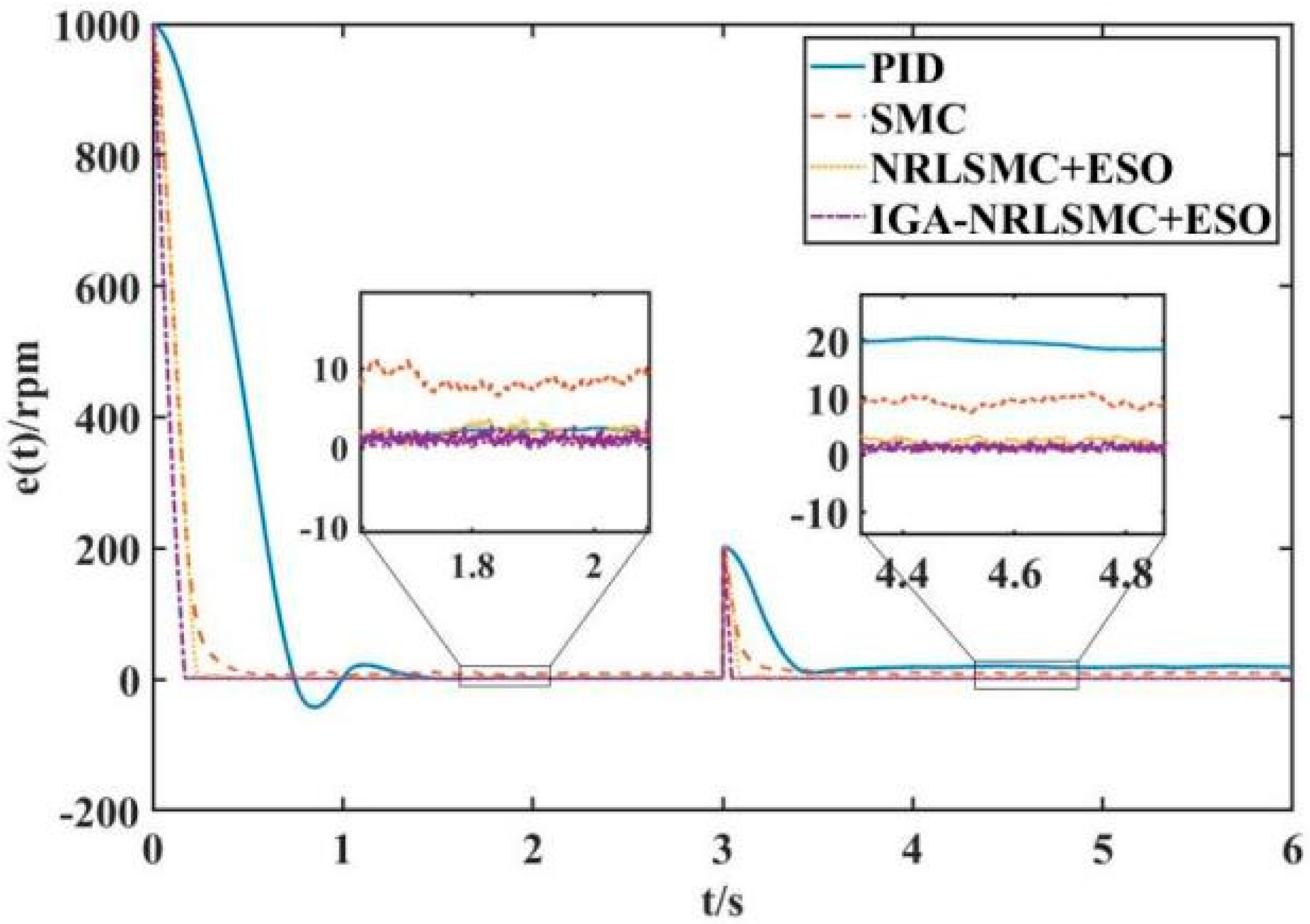
The speed error curves obtained from experiments using four different speed controllers are presented in
Figure 18. Based on the experimental speed error comparison given in
Table 9, it can be observed that when the PMSM runs at a steady state of 1000 rpm, IGA-NRLSMC+ESO has the smallest steady-state error of 0–2.5 rpm. Similarly, when the speed is increased to 1200 rpm after 3 s, IGA-NRLSMC+ESO also maintains the smallest steady-state error of 0–2 rpm. These results demonstrate that IGA-NRLSMC+ESO offers strong robustness and outperforms PID, SMC, and NRLSMC+ESO regarding the steady-state error.
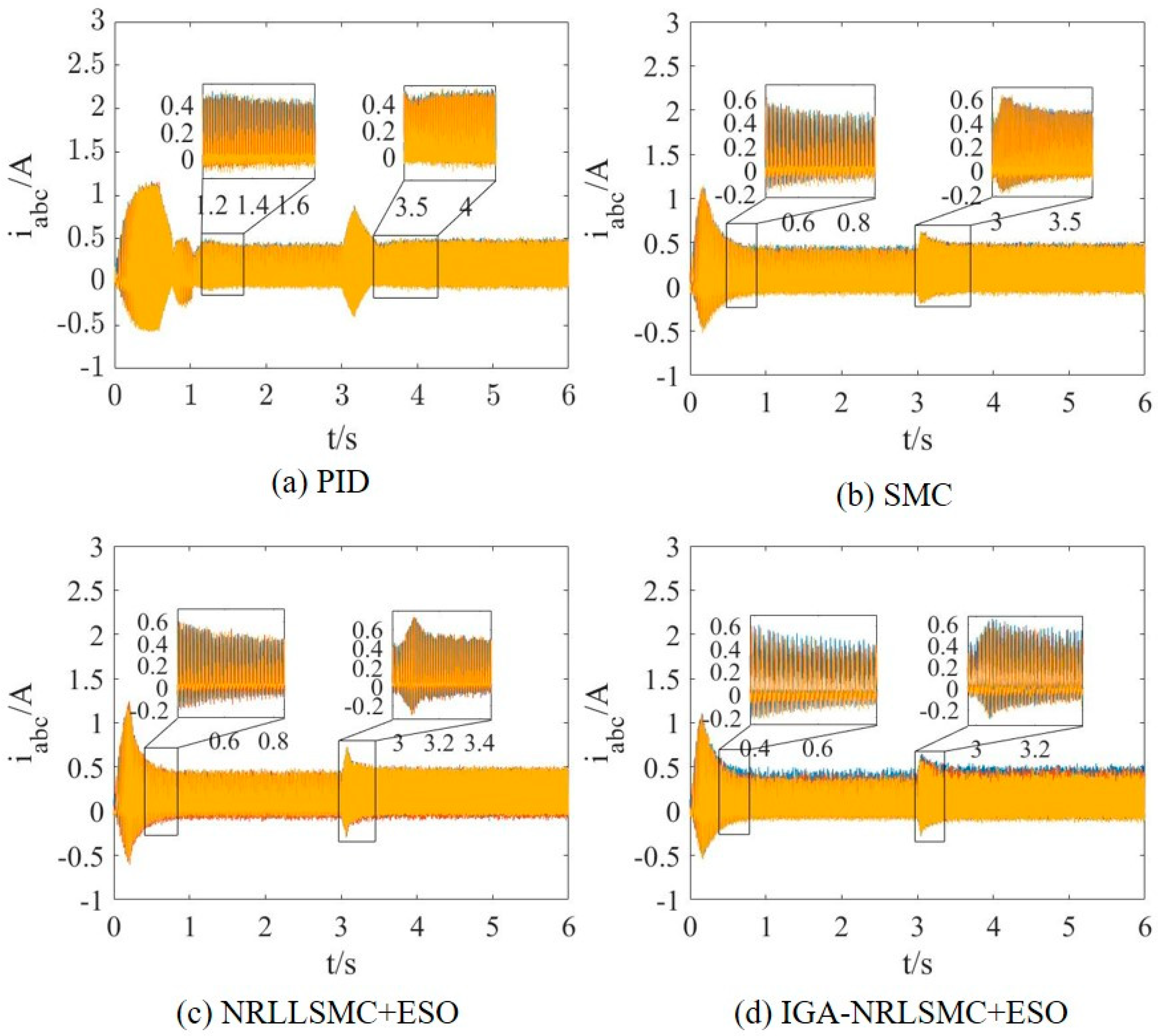
The current curves of the three phases obtained from the experiments with four different speed controllers are presented in
Figure 19. It can be observed that the three-phase currents obtained by IGA-NRLSMC+ESO reach the steady state value faster during both start-up and speed increase compared to the other three speed controllers. This observation is consistent with the simulation results.
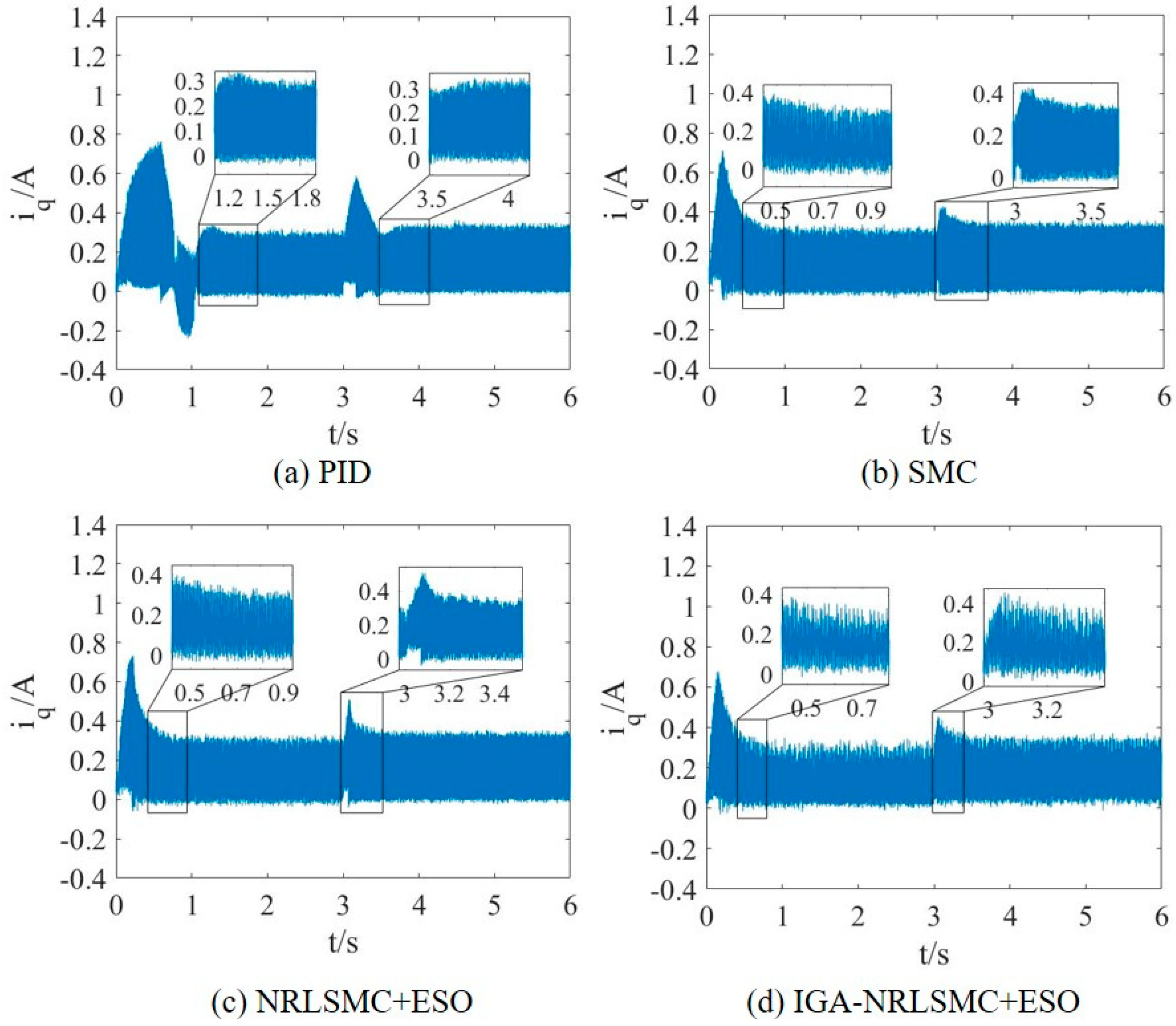
The
q-axis current curves obtained from the experiments with four different speed controllers are shown in
Figure 20. It can be observed that the
q-axis currents obtained by IGA-NRLSMC+ESO reach the steady state value first during the start-up and speed increase compared to the other three speed controllers. The response time of the
q-axis current is the same as the experimental three-phase current. These results further demonstrate the strong robustness of IGA-NRLSMC+ESO, giving it an advantage over PID, SMC, and NRLSMC+ESO.
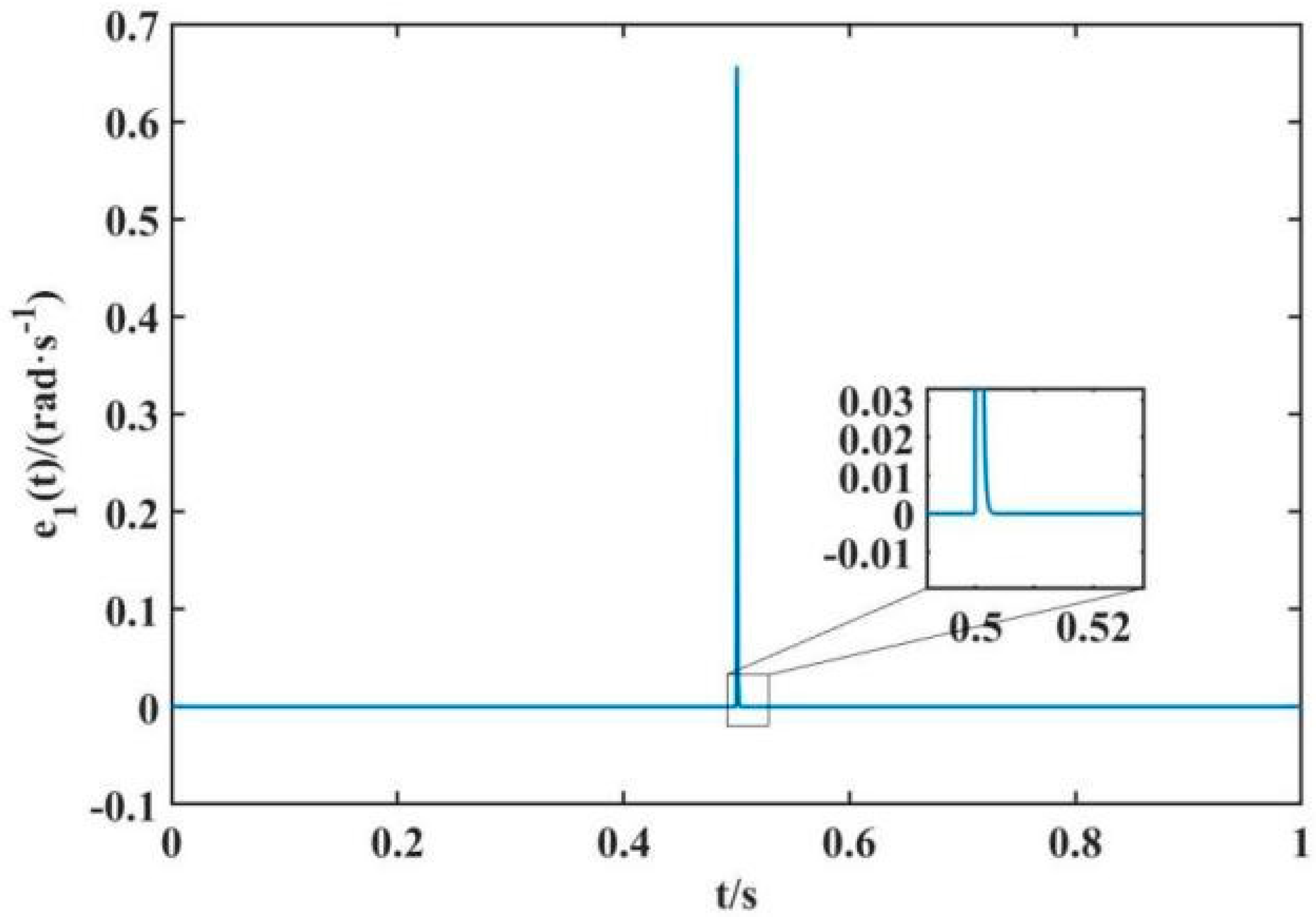
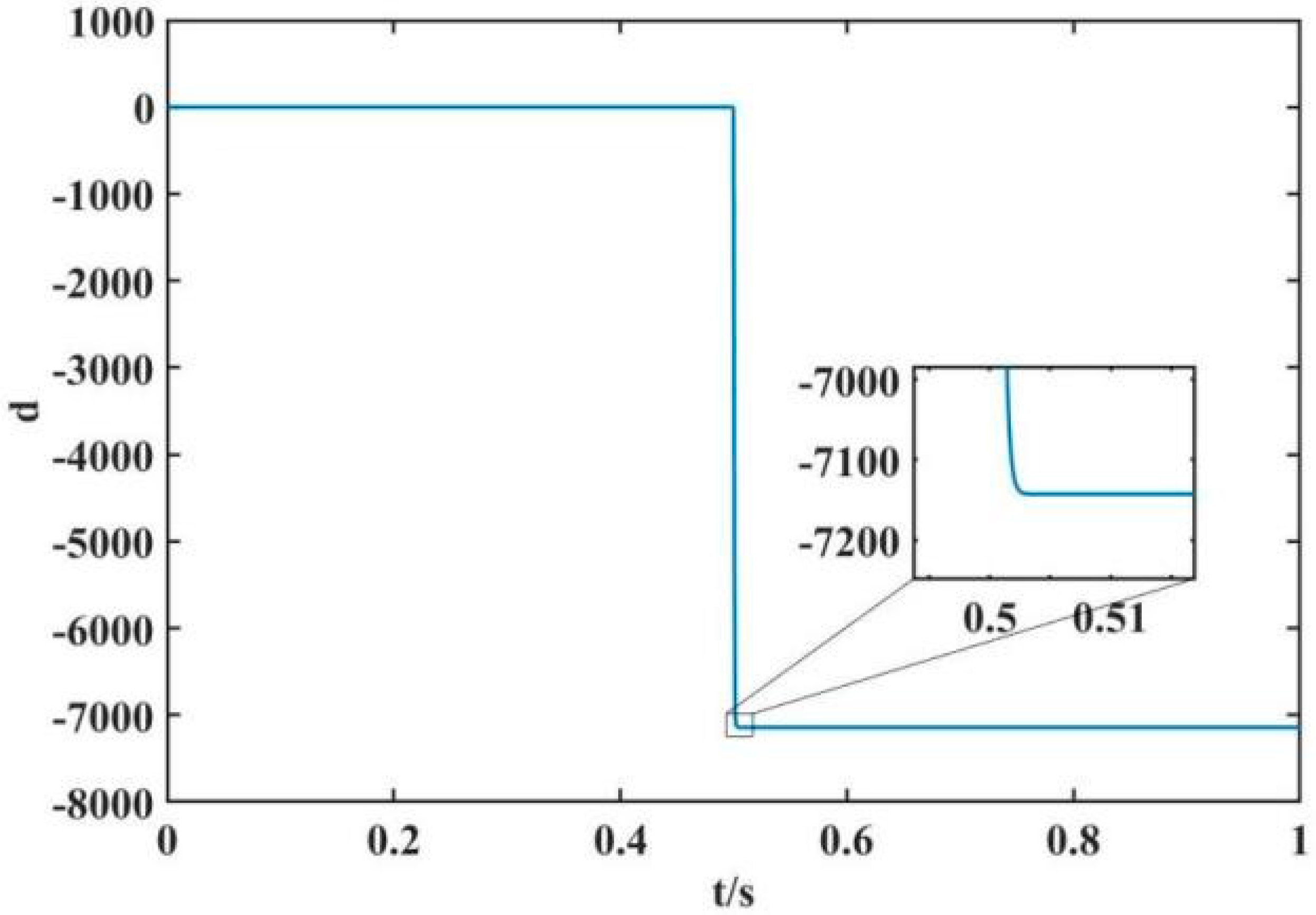
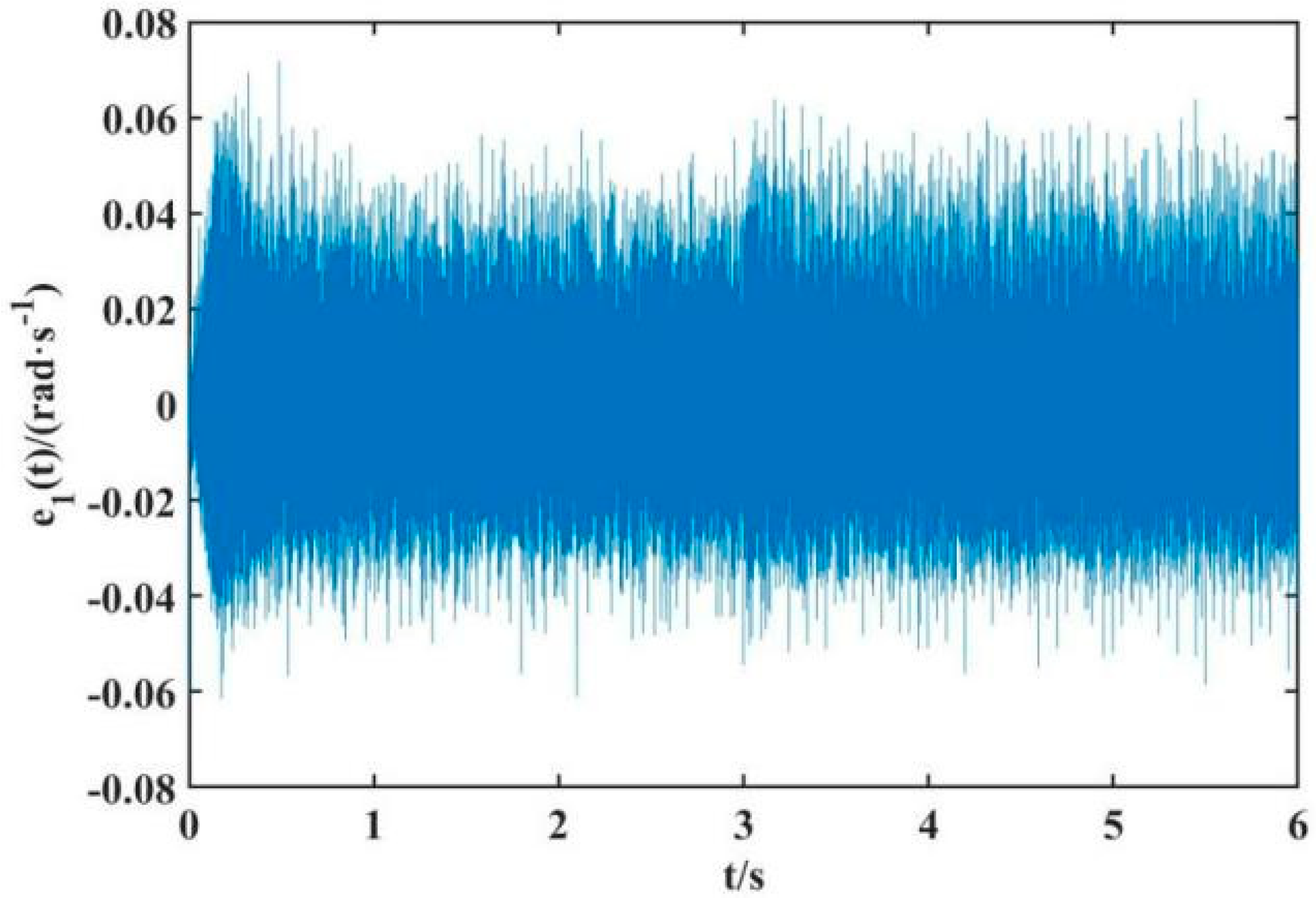
Figure 21 and
Figure 22 illustrate the experimental results of the IGA-NRLSMC+ESO control system, showing the observed error curve of
ωm and the total disturbance observed curve, respectively. As shown in
Figure 21, the IGA-NRLSMC+ESO can accurately observe
ωm in practice, with a small observation error even when the speed is increased, and the observed error of
ωm is only between −0.06 and 0.06 rad/s throughout the process.
Figure 22 indicates that IGA-NRLSMC+ESO can rapidly detect the change of the total disturbance, with a response time of 0.05 s when the speed changes after 3 s. These results further confirm that the introduction of ESO enhances the anti-disturbance capability of the control system.
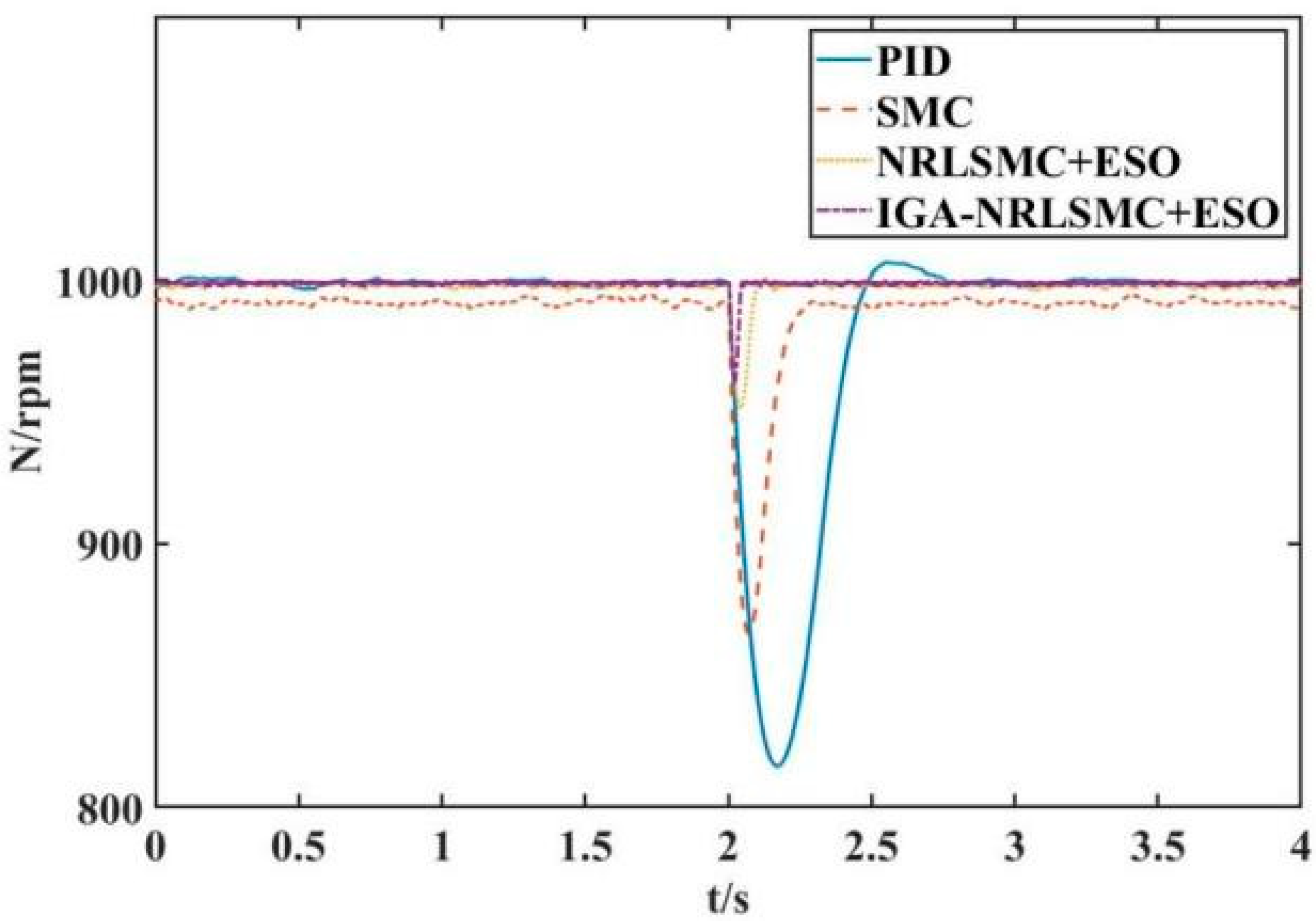
The experimental results for the applied load condition with a sudden increase of 0.2 N·m load, while the motor runs steadily at 1000 rpm, are shown in
Figure 23 under experimental condition 2.
Figure 23 illustrates the loading speed curves obtained by four different speed controllers in the experiment, under condition 2 which is sudden loading with 0.2 N·m at 1000 rpm. As shown in
Table 10, the speed curve obtained by IGA-NRLSMC+ESO exhibits the smallest drop of 43 rpm, which is 142 rpm, 91 rpm, and 7 rpm less than the other three speed controllers, respectively. Additionally, IGA-NRLSMC+ESO demonstrates the shortest adjustment time of 0.05 s, which is 0.77 s, 0.25 s, and 0.07 s less than the other three speed controllers. These results further confirm that IGA-NRLSMC+ESO enhances the system’s robustness.
Comparing the experimental and simulation results under the same working conditions, the speed curve, speed error curve, three-phase current curve, q-axis current curve, and loading speed curve obtained by adopting IGA-NRLSMC+ESO in the experiment are superior to the other three speed controllers. This confirms that the system can benefit from the advantages of no overshoot, fast response, and strong robustness, consistent with the simulation results, thus verifying the accuracy of the simulation results.


 ,
, 























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}