Study on the Driver/Steering Wheel Interaction in Emergency Situations



Abstract
:1. Introduction
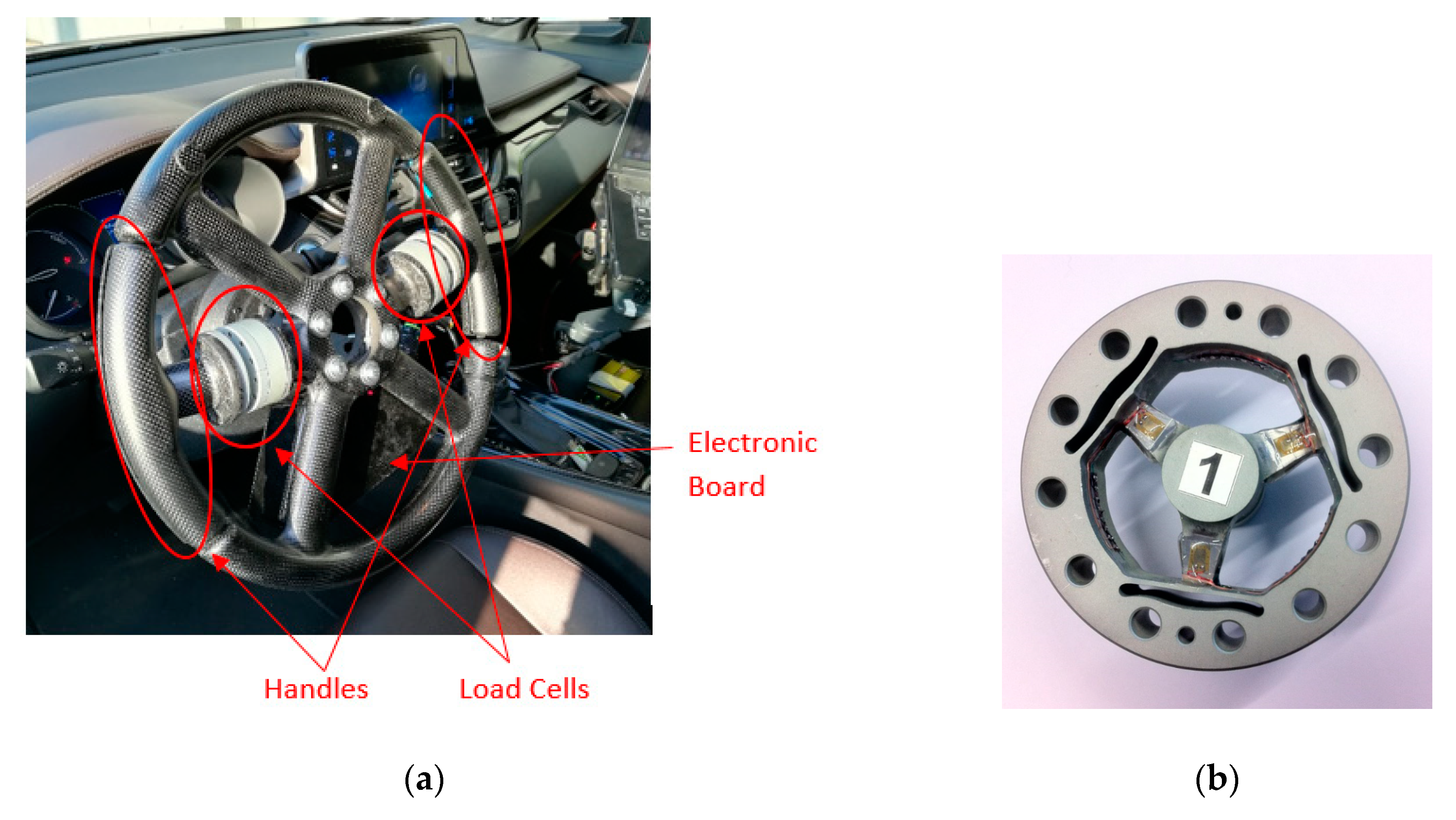
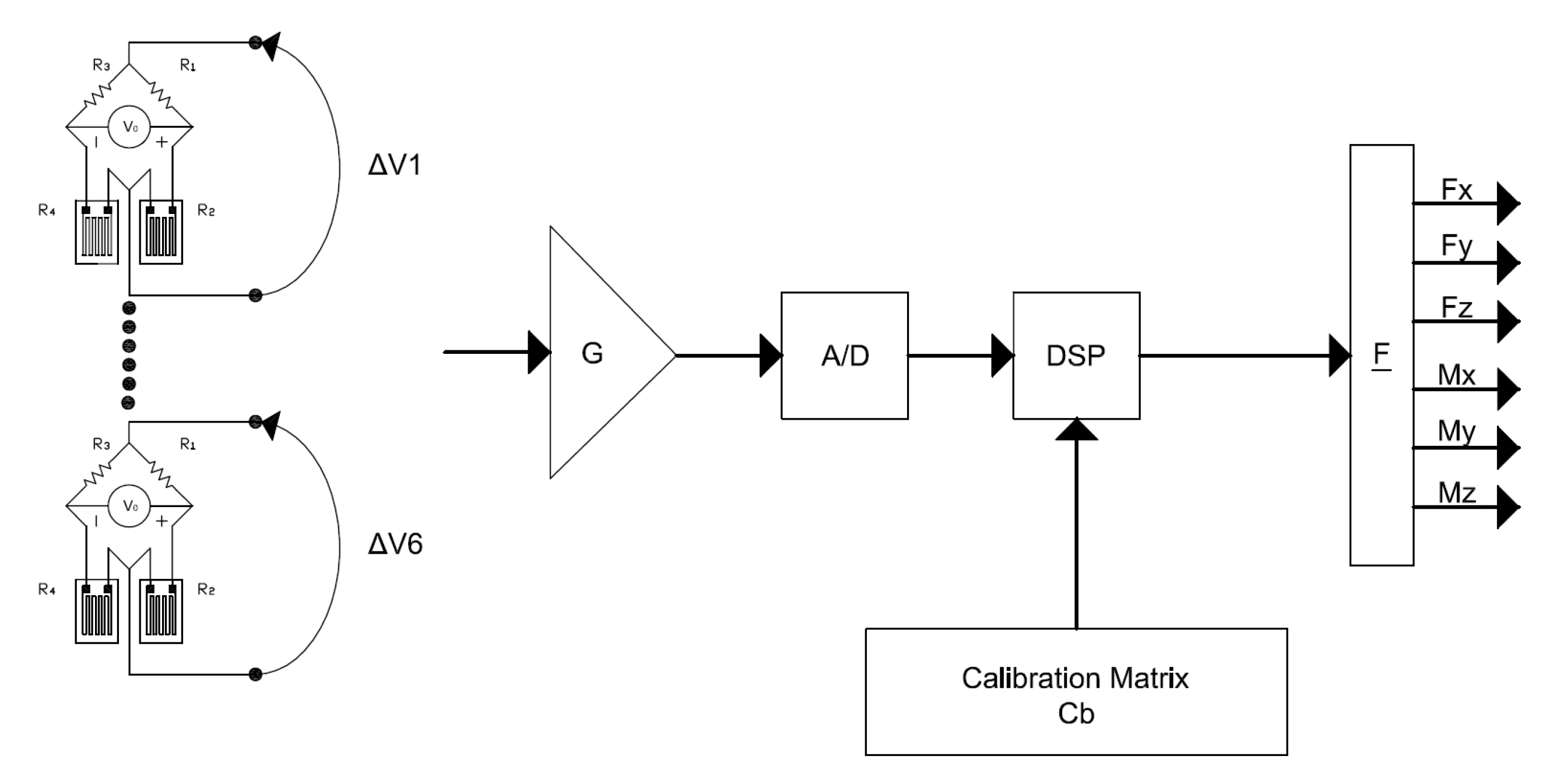
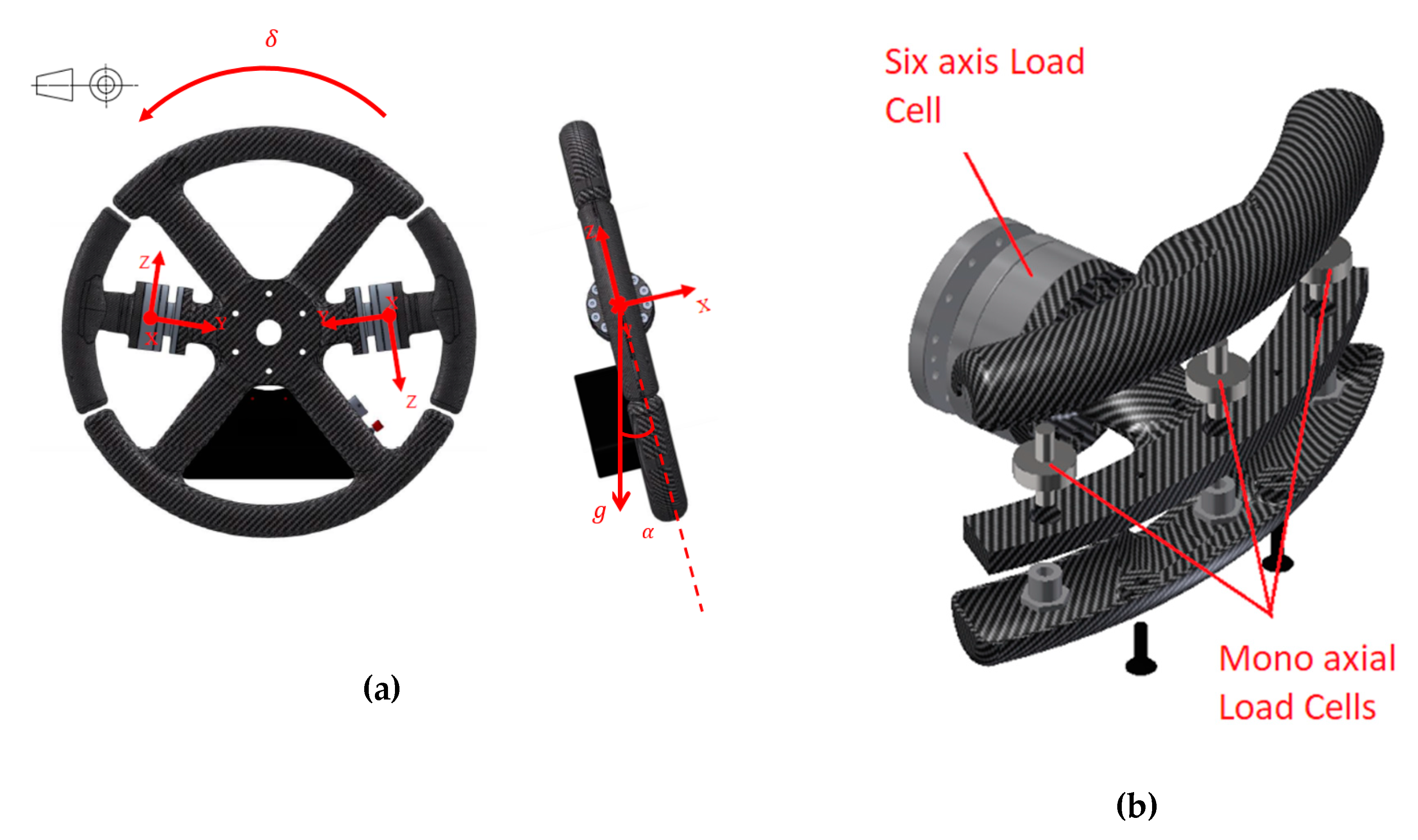
2. Experimental Setup
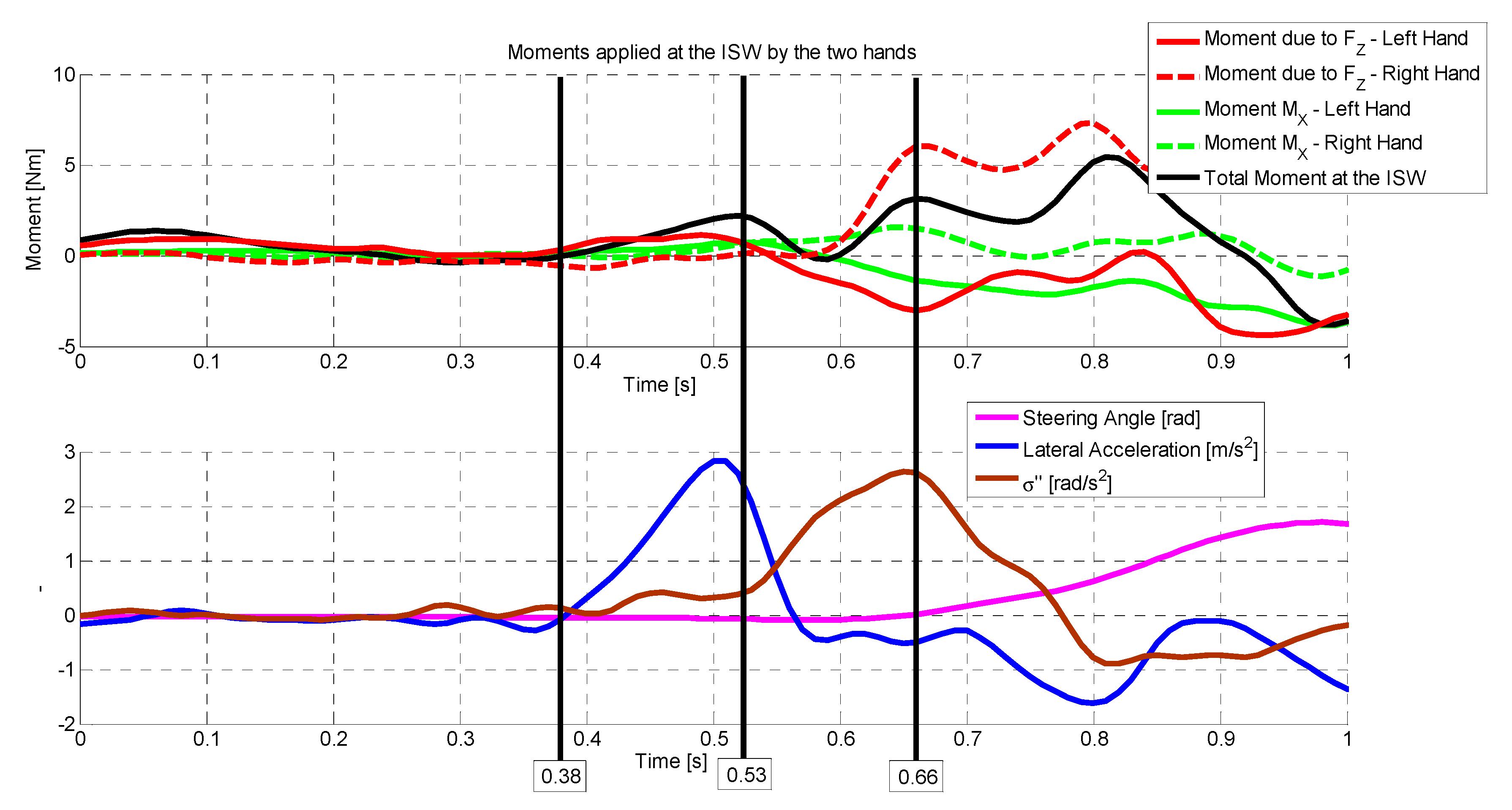
3. Kick Plate Disturbance while Driving with Two Hands
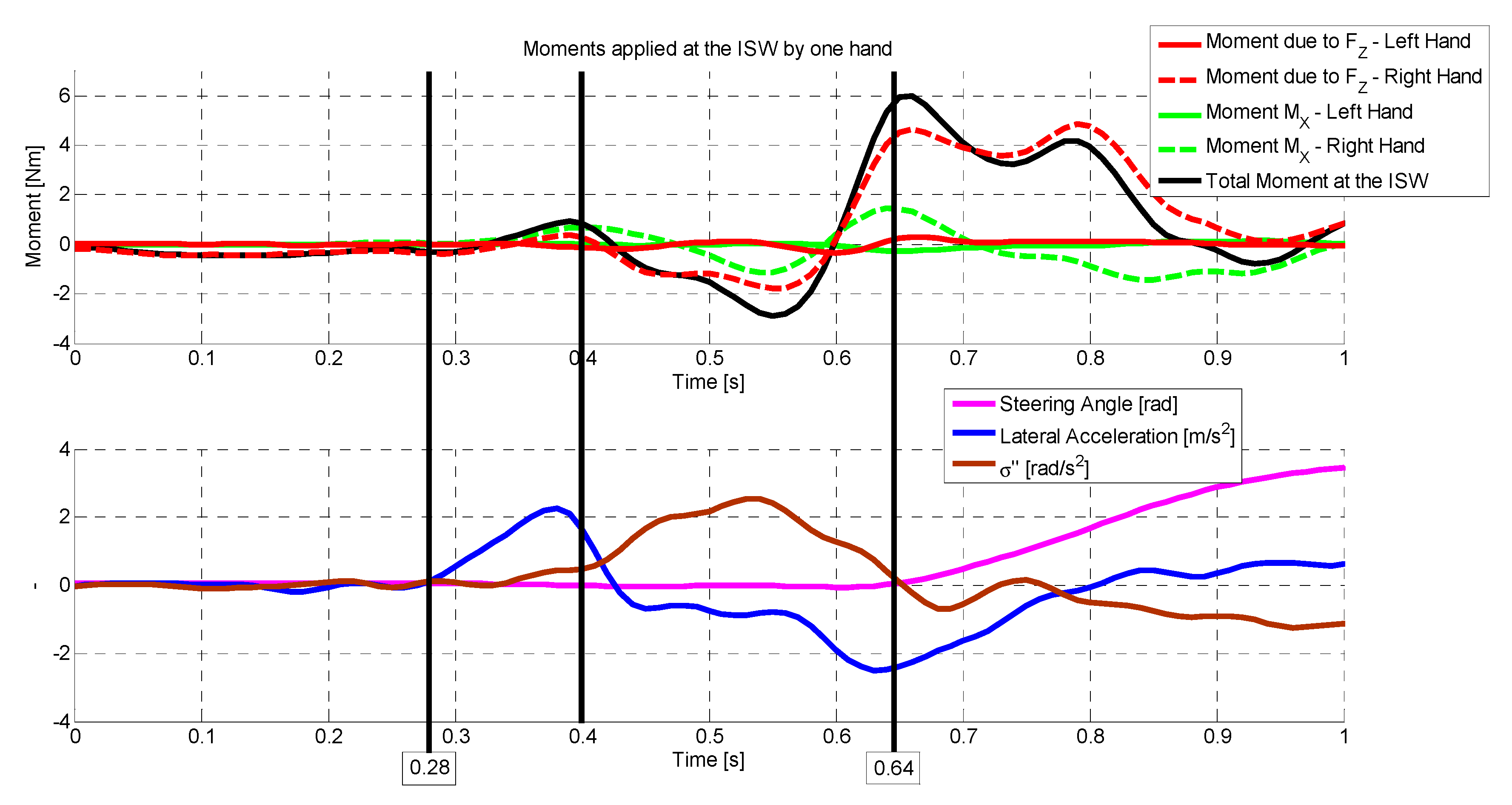
4. Kick Plate Disturbance while Driving with One Hand
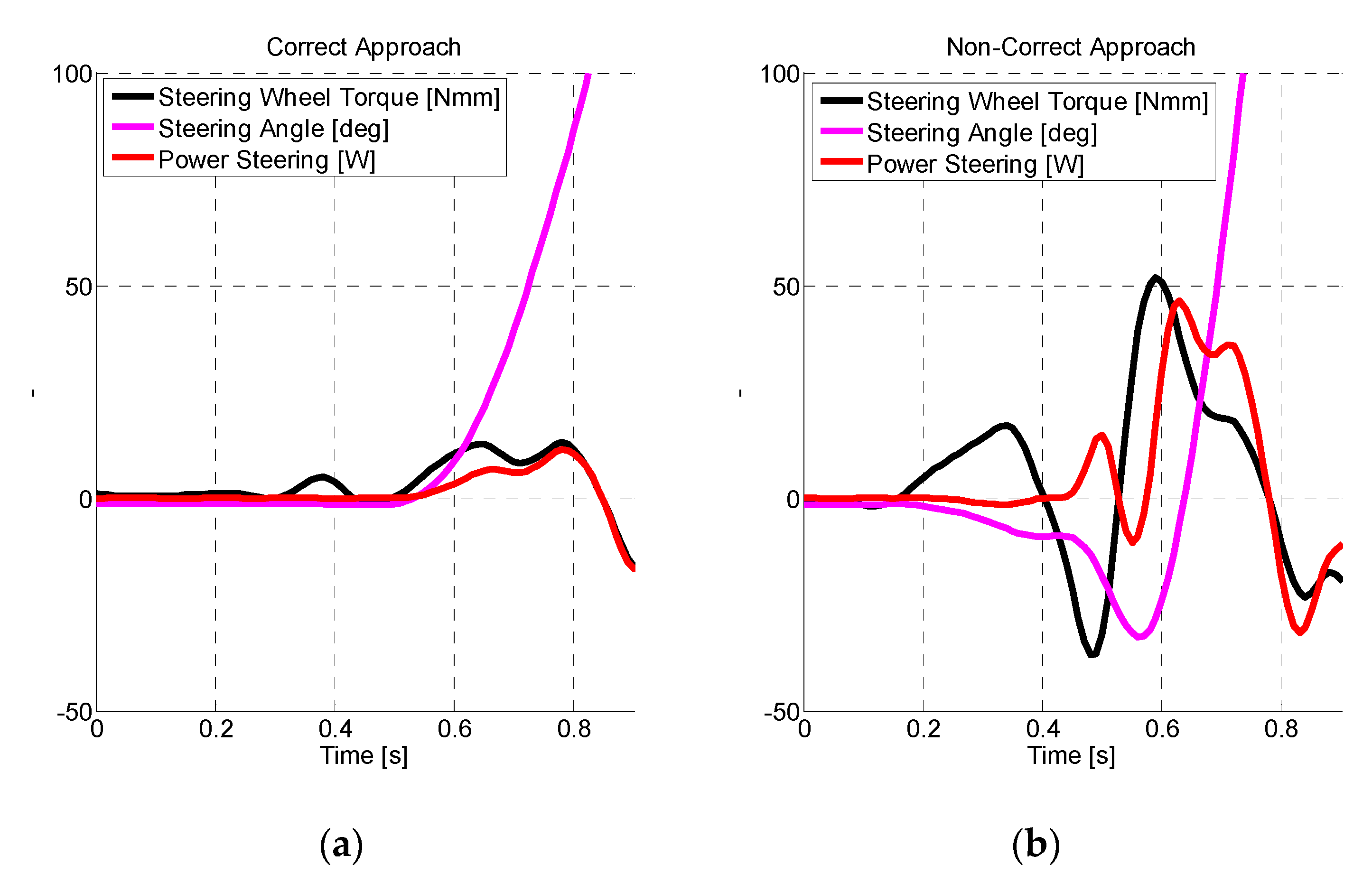
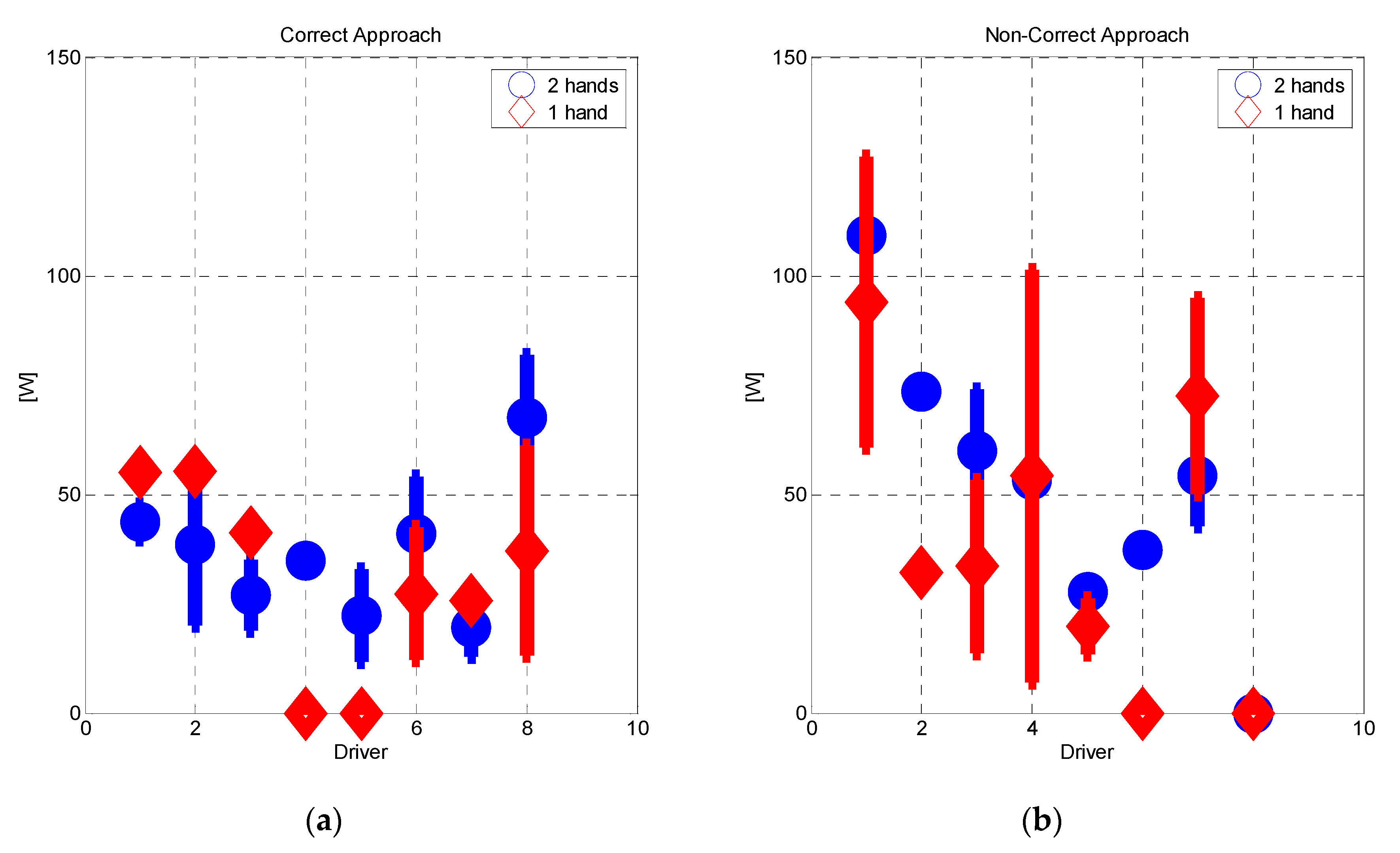
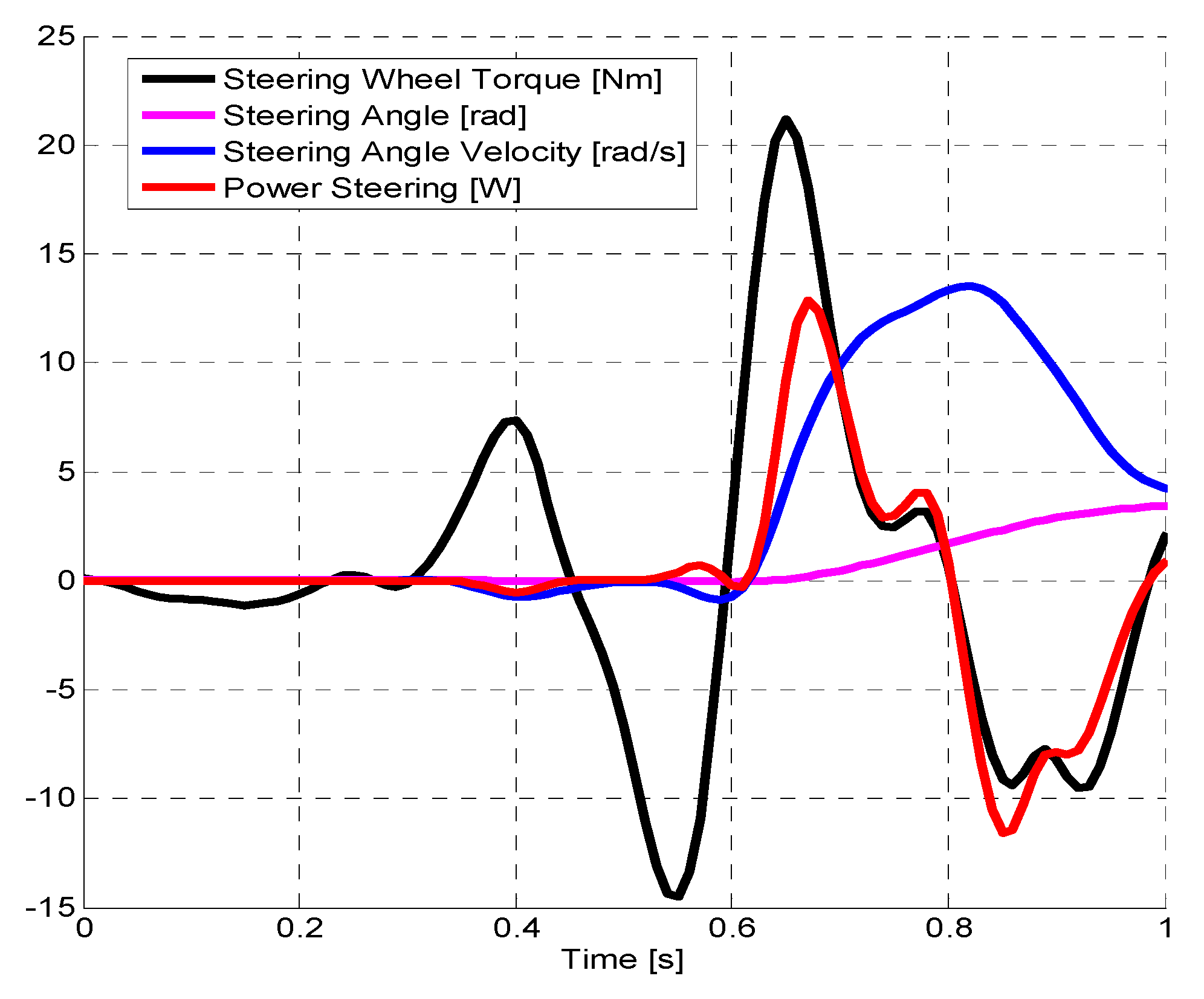
5. Steering Power Evaluation
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pick, A.J.; Cole, D.J. A mathematical model of driver steering control including neuromuscular dynamics. J. Dyn. Syst. Meas. Control. 2008, 130, 031004. [Google Scholar] [CrossRef]
- Wei, H.; Wu, Y.; Chen, X.; Xu, J. A Steering-Following Dynamic Model with Driver’s NMS Characteristic for Human-Vehicle Shared Control. Appl. Sci. 2020, 10, 2626. [Google Scholar] [CrossRef] [Green Version]
- Gobbi, M.; Comolli, F.; Hada, M.; Mastinu, G. An instrumented steering wheel for driver model development. Mechatronics. 2019, 64, 102285. [Google Scholar] [CrossRef]
- Saito, Y.; Itoh, M.; Inagaki, T. Driver Assistance System With a Dual Control Scheme: Effectiveness of Identifying Driver Drowsiness and Preventing Lane Departure Accidents. IEEE Trans. Human-Machine Syst. 2016, 46, 660–671. [Google Scholar] [CrossRef] [Green Version]
- Bonera, E.; Gadola, M.; Chindamo, D.; Morbioli, S.; Magri, P. On the Influence of Suspension Geometry on Steering Feedback. Appl. Sci. 2020, 10, 4297. [Google Scholar] [CrossRef]
- Cai, H.; Hu, Z.; Chen, Z.; Zhu, D. A Driving Fingerprint Map Method of Driving Characteristic Representation for Driver Identification. IEEE Access. 2018, 6, 71012–71019. [Google Scholar] [CrossRef]
- Wang, Z.; Zheng, R.; Kaizuka, T.; Shimono, K.; Nakano, K. The Effect of a Haptic Guidance Steering System on Fatigue-Related Driver Behavior. IEEE Trans. Human-Machine Syst. 2017, 47, 741–748. [Google Scholar] [CrossRef]
- Jiang, H.; Tian, H.; Hua, Y.; Tang, B. Research on Control of Intelligent Vehicle Human-Simulated Steering System Based on HSIC. Appl. Sci. 2019, 9, 905. [Google Scholar] [CrossRef] [Green Version]
- Okamoto, K.; Tsiotras, P. A Comparative Study of Data-Driven Human Driver Lateral Control Models. In Proceedings of the 2018 American Control Conference (ACC 2018), Milwaukee, WI, USA, 27–29 June 2018; pp. 3988–3993. [Google Scholar]
- Li, A.; Jiang, H.; Zhou, J.; Zhou, X. Implementation of Human-Like Driver Model Based on Recurrent Neural Networks. IEEE Access 2019, 7, 98094–98106. [Google Scholar] [CrossRef]
- Fang, Z.; Wang, J.; Li, P.; Xia, J. Modeling of driver’s steering behavior in large-curvature path following with back propagation neural network. In Proceedings of the 38th Chinese Control Conference (CCC2019), Guangzhou, China, 27–30 July 2019; pp. 6727–6732. [Google Scholar]
- Cheng, Z.J.; Jeng, L.W.; Li, K. Behavioral classification of drivers for driving efficiency related ADAS using artificial neural network. In Proceedings of the 2018 IEEE International Conference on Advanced Manufacturing (IEEE ICAM 2018), Yunlin, Taiwan, 16–18 November 2018; pp. 173–176. [Google Scholar]
- Del Campo, I.; Finker, R.; Martinez, M.V.; Echanobe, J.; Doctor, F. A real-time driver identification system based on artificial neural networks and cepstral analysis. In Proceedings of the 2014 International Joint Conference on Neural Networks (IJCNN 2014), Beijing, China, 6–11 July 2014; pp. 1848–1855. [Google Scholar]
- Martínez, M.V.; Echanobe, J.; Del Campo, I. Driver identification and impostor detection based on driving behavior signals. In Proceedings of the 19th International IEEE Conference on Intelligent Transportation Systems (IEEE ITSC 2016), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 372–378. [Google Scholar]
- Kolekar, S.; Mugge, W.; Abbink, D.A. Modeling Intradriver Steering Variability Based on Sensorimotor Control Theories. IEEE Trans. Human-Machine Syst. 2018, 48, 291–303. [Google Scholar] [CrossRef]
- Zhu, B.; Liu, Z.; Zhao, J.; Chen, Y.; Deng, W. Driver Behavior Characteristics Identification Strategies Based on Bionic Intelligent Algorithms. IEEE Trans. Human-Machine Syst. 2018, 48, 572–581. [Google Scholar] [CrossRef]
- You, C.; Lu, J.; Tsiotras, P. Nonlinear Driver Parameter Estimation and Driver Steering Behavior Analysis for ADAS Using Field Test Data. IEEE Trans. Human-Machine Syst. 2017, 47, 686–699. [Google Scholar] [CrossRef]
- Gote, C.; Flad, M.; Hohmann, S. Driver characterization & driver specific trajectory planning: An inverse optimal control approach. In Proceedings of the 2014 IEEE International Conference on Systems, Man and Cybernetics (SMC2014), San Diego, California, 5–8 October 2014; pp. 3014–3021. [Google Scholar]
- Hua, Y.; Jiang, H.; Tian, H.; Xu, X.; Chen, L. A Comparative Study of Clustering Analysis Method for Driver’s Steering Intention Classification and Identification under Different Typical Conditions. Appl. Sci. 2017, 7, 1014. [Google Scholar] [CrossRef]
- Chen, S.H.; Pan, J.S.; Lu, K. Driving behavior analysis based on vehicle OBD information and adaboost algorithms. Lecture Notes in Engineering and Computer Science 2015, 1, 102–106. [Google Scholar]
- Pan, J.-S.; Lu, K.; Chen, S.-H.; Yan, L. Driving Behavior Analysis of Multiple Information Fusion Based on SVM. In Lecture Notes in Computer Science; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2014; Volume 8481, pp. 60–69. [Google Scholar]
- Sathyanarayana, A.; Boyraz, P.; Purohit, Z.; Lubag, R.; Hansen, J.H.L. Driver adaptive and context aware active safety systems using CAN-bus signals. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium (IV ’10), San Diego, CA, USA, 21–24 June 2010; pp. 1236–1241. [Google Scholar]
- Van Ly, M.; Martin, S.; Trivedi, M.M. Driver classification and driving style recognition using inertial sensors. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), QLD, Australia, 23–26 June 2013; pp. 1040–1045. [Google Scholar]
- Hallac, D.; Sharang, A.; Stahlmann, R.; Lamprecht, A.; Huber, M.; Roehder, M.; Sosič, R.; Leskovec, J. Driver identification using automobile sensor data from a single turn. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 953–958. [Google Scholar]
- Silva, H.; Lourenço, A.; Fred, A. In-vehicle driver recognition based on hands ECG signals. In Proceedings of the 17th International Conference on Intelligent User Interfaces (IUI 2012), Lisbon, Portugal, 14–17 February 2012; pp. 25–28. [Google Scholar]
- Yang, C.H.; Liang, D.; Chang, C.C. A novel driver identification method using wearables. In Proceedings of the 2016 13th IEEE Annual Consumer Communications & Networking Conference (CCNC 2016), Las Vegas, NV, USA, 9–12 January 2016; pp. 1–5. [Google Scholar]
- Schmidt, E.; Decke, R.; Rasshofer, R. Correlation between subjective driver state measures and psychophysiological and vehicular data in simulated driving. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 1380–1385. [Google Scholar]
- Abe, M. Vehicle Handling Dynamics; Elsevier BV: Amsterdam, The Netherlands, 2015. [Google Scholar]
- Gabrielli, F.; Pudlo, P.; Djemai, M. Instrumented steering wheel for biomechanical measurements. Mechatronics 2012, 22, 639–650. [Google Scholar] [CrossRef]
- Schiro, J.; Gabrielli, F.; Pudlo, P.; Barbier, F.; Djemai, M. Normal/tangential force proportion during steering under simulation condition. Comput. Methods Biomech. Biomed. Eng. 2012, 15, 243–245. [Google Scholar] [CrossRef] [PubMed]
- Gobbi, M.; Comolli, F.; Ballo, F.M.; Mastinu, G. Measurement data obtained by an instrumented steering wheel for driver model development. Data Brief 2020, 30, 105485. [Google Scholar] [CrossRef] [PubMed]
- Comolli, F.; Ballo, F.M.; Gobbi, M.; Mastinu, G. Instrumented Steering Wheel: Accurate Experimental Characterisation of the Forces Exerted by the Driver Hands for Future Advanced Driver Assistance Systems. In Proceedings of the Volume 3: 20th International Conference on Advanced Vehicle Technologies; 15th International Conference on Design Education, Quebec City, QC, Canada, 26–29 August 2018. [Google Scholar]
- Mastinu, G.; Gobbi, M.; Comolli, F.; Hada, M. Instrumented Steering Wheel for Accurate ADAS Development. In Proceedings of the SAE Technical Papers; SAE International, SAE WCX, Detroit, MI, USA, 9–11 April 2019; Vol. 2019-April. [Google Scholar]
- Carrera Akutain, X.; Ono, K.; Comolli, F.; Gobbi, M.; Mastinu, G. Further understanding of steering feedback and driver behavior through the application of an instrumented steering wheel. In Proceedings of the 10th International Munich Chassis Symposium, Munich, Germany, 25–26 June 2019; pp. 481–502. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Δt1 (s) | Δt2 (s) | Δt3 (s) | |
|---|---|---|---|
| Avg ± St. Dev. | Avg ± St. Dev. | Avg ± St. Dev. | |
| Driver 1 | 0.138 ± 0.033 | 0.273 ± 0.082 | 0.412 ± 0.082 |
| Driver 2 | 0.114 ± 0.030 | 0.160 ± 0.102 | 0.274 ± 0.102 |
| Driver 3 | 0.128 ± 0.025 | 0.257 ± 0.099 | 0.385 ± 0.099 |
| Driver 4 | 0.158 ± 0.015 | 0.360 ± 0.058 | 0.518 ± 0.058 |
| Driver 5 | 0.120 ± 0.032 | 0.280 ± 0.181 | 0.400 ± 0.181 |
| Driver 6 | 0.148 ± 0.024 | 0.268 ± 0.096 | 0.417 ± 0.096 |
| Driver 7 | 0.145 ± 0.031 | 0.368 ± 0.082 | 0.513 ± 0.082 |
| Driver 8 | 0.120 ± 0.141 | 0.250 ± 0.141 | 0.370 ± 0.141 |
| Average | 0.137 ± 0.030 | 0.282 ± 0.114 | 0.416 ± 0.128 |
| Δt1 (s) | Δt2 (s) | Δt3 (s) | |
|---|---|---|---|
| Avg ± St. Dev. | Avg ± St. Dev. | Avg ± St. Dev. | |
| Driver 1 | 0.150 ± 0.035 | 0.270 ± 0.026 | 0.420 ± 0.026 |
| Driver 2 | 0.160 ± 0.042 | 0.090 ± 0.057 | 0.250 ± 0.057 |
| Driver 3 | 0.187 ± 0.090 | 0.160 ± 0.069 | 0.347 ± 0.069 |
| Driver 4 | 0.177 ± 0.015 | 0.193 ± 0.146 | 0.433 ± 0.146 |
| Driver 5 | 0.137 ± 0.055 | 0.093 ± 0.045 | 0.260 ± 0.045 |
| Driver 6 | 0.133 ± 0.071 | 0.213 ± 0.055 | 0.347 ± 0.055 |
| Driver 7 | 0.173 ± 0.089 | 0.210 ± 0.060 | 0.383 ± 0.060 |
| Driver 8 | 0.073 ± 0.035 | 0.300 ± 0.035 | 0.373 ± 0.035 |
| Average | 0.148 ± 0.051 | 0.208 ± 0.082 | 0.356 ± 0.080 |
| Avg ± St. Dev. | ||
| Correct approach | Two hands | 41.48 ± 21.76 |
| One hand | 38.12 ± 17.19 | |
| Incorrect approach | Two hands | 65.48 ± 28.67 |
| One hand | 50.01 ± 34.98 |
| Avg ± St. Dev. | (two hands – one hand) | Avg ± St. Dev. | (two hands – one hand) | ||
| Correct approach | Two hands | 4.41 ± 1.12 | +13% | 8.96 ± 3.22 | −7% |
| One hand | 3.83 ± 0.67 | 9.62 ± 3.24 | |||
| Incorrect approach | Two hands | 5.91 ± 0.94 | +19% | 10.80 ± 3.98 | +12% |
| One hand | 4.81 ± 1.97 | 9.53 ± 3.65 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Comolli, F.; Gobbi, M.; Mastinu, G. Study on the Driver/Steering Wheel Interaction in Emergency Situations. Appl. Sci. 2020, 10, 7055. https://doi.org/10.3390/app10207055
Comolli F, Gobbi M, Mastinu G. Study on the Driver/Steering Wheel Interaction in Emergency Situations. Applied Sciences. 2020; 10(20):7055. https://doi.org/10.3390/app10207055
Chicago/Turabian StyleComolli, Francesco, Massimiliano Gobbi, and Gianpiero Mastinu. 2020. "Study on the Driver/Steering Wheel Interaction in Emergency Situations" Applied Sciences 10, no. 20: 7055. https://doi.org/10.3390/app10207055