
Effect of Gait Speed on Recovery Motion from Tripping on a Treadmill


Abstract
:1. Introduction
2. Methods
2.1. Subjects
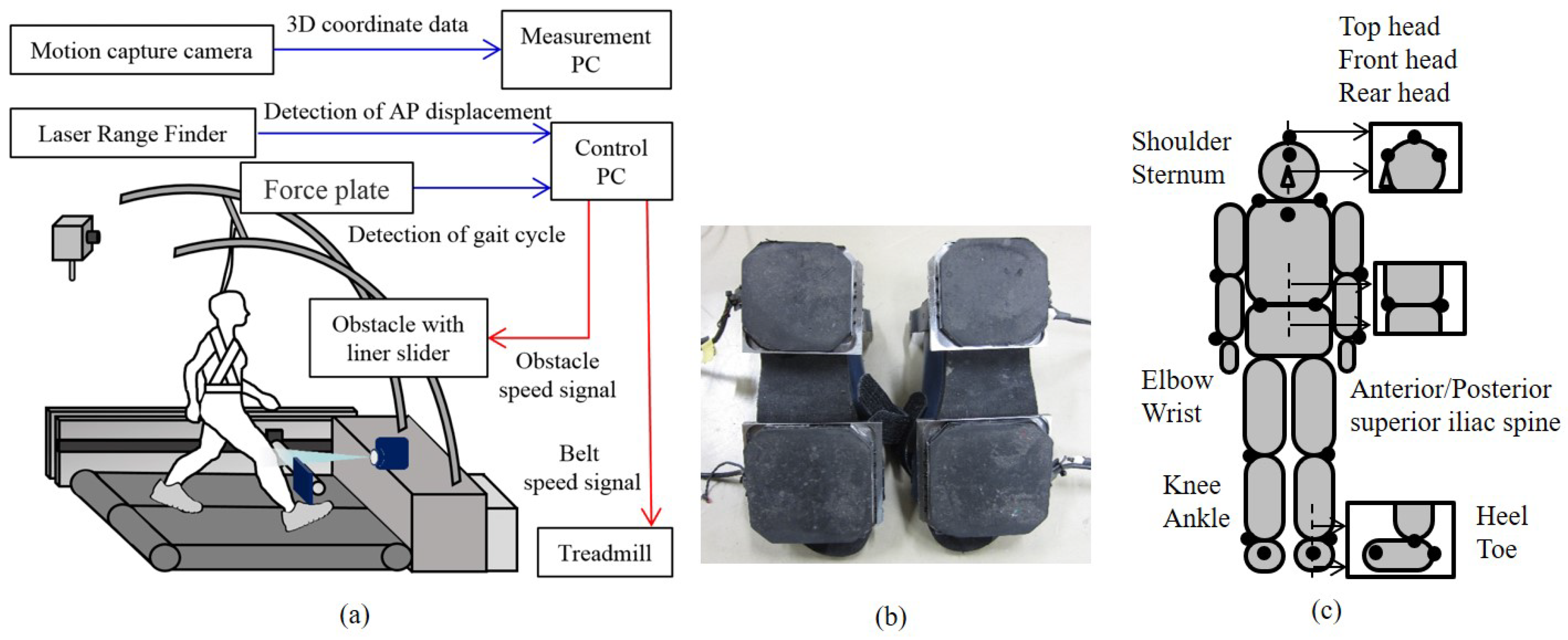
2.2. Experimental Setup
2.3. Protocol
2.4. Data Processing
3. Results
3.1. Overview of Recorded Trials
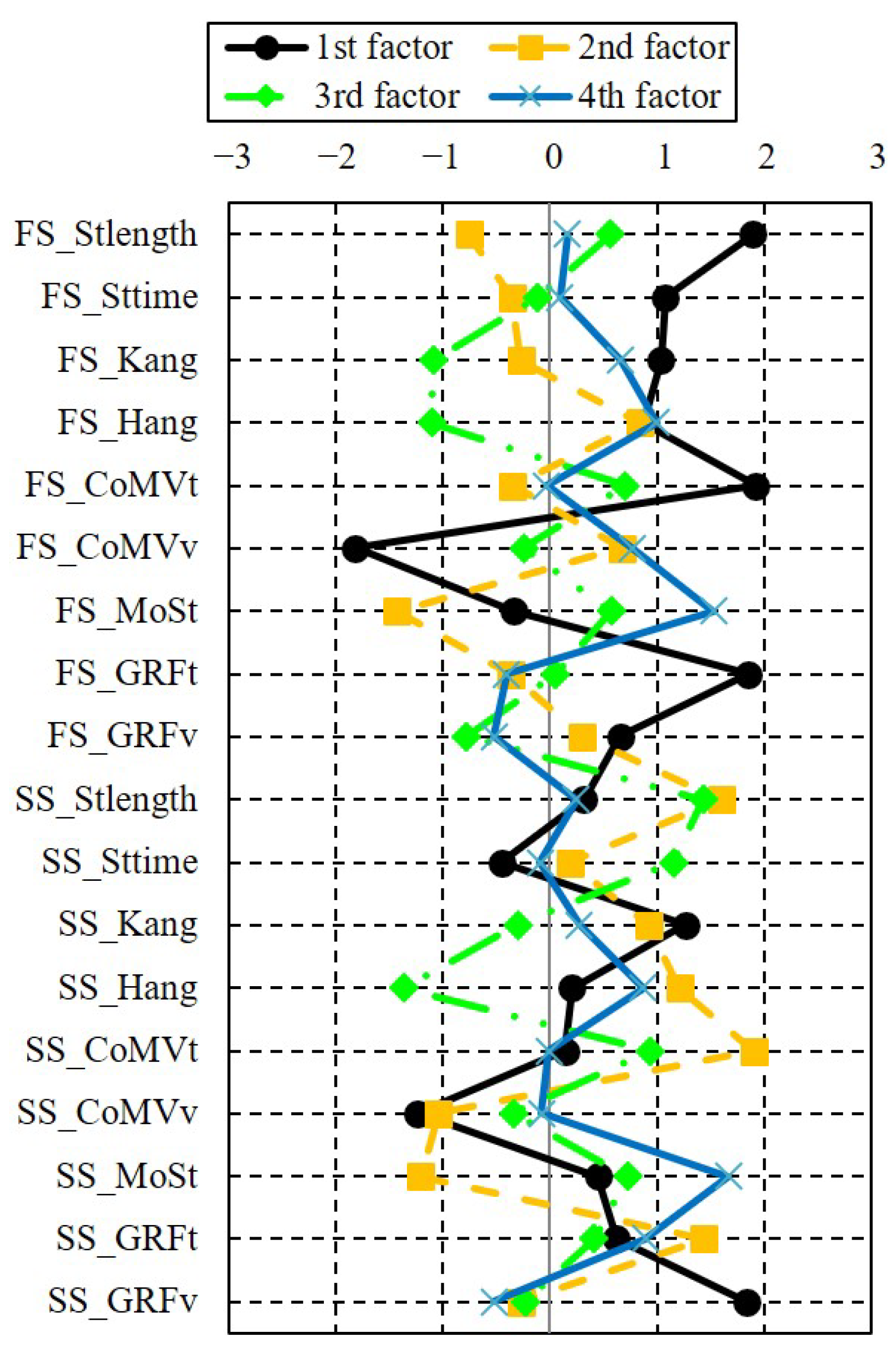
3.2. Effect of Gait Speed on Reaction Parameters
4. Discussion
4.1. Overview of Reaction Motion
4.2. Reaction Motion Strategies
4.3. Effect of Gait Speed on Reaction Motion
4.4. Differences between Reaction Motion on a Treadmill and Overground Walking
4.5. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tate, D.G. Workers’ disability and return to work. Am. J. Phys. Med. Rehabil. 1992, 71, 92–96. [Google Scholar] [CrossRef] [PubMed]
- Lipscomb, H.J.; Glazner, J.E.; Bondy, J.; Guarini, K.; Lezotte, D. Injuries from slips and trips in construction. Appl. Ergon. 2006, 37, 267–274. [Google Scholar] [CrossRef] [PubMed]
- Eng, J.J.; Winter, D.A.; Patla, A.E. Strategies for Recovery from a Trip in Early and Late Swing during Human Walking. Exp. Brain Res. 1994, 102, 339–349. [Google Scholar] [CrossRef] [PubMed]
- Shirota, C.; Simon, A.M.; Kuiken, T.A. Trip recovery strategies following perturbations of variable duration. J. Biomech. 2014, 47, 2679–2684. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roos, P.E.; McGuigan, M.P.; Trewartha, G. The role of strategy selection, limb force capacity and limb positioning in successful trip recovery. Clin. Biomech. 2010, 25, 873–878. [Google Scholar] [CrossRef] [Green Version]
- Owings, T.M.; Pavol, M.J.; Grabiner, M.D. Mechanisms of failed recovery following postural perturbations on a motorized treadmill mimic those associated with an actual forward trip. Clin. Biomech. 2001, 16, 813–819. [Google Scholar] [CrossRef]
- Pavol, M.J.; Owings, T.M.; Foley, K.T.; Grabiner, M.D. Mechanisms leading to a fall from an induced trip in healthy older adults. J. Gerontol. Ser. A Biol. Sci. Med. Sci. 2001, 56, M428–M437. [Google Scholar] [CrossRef] [Green Version]
- Akiyama, Y.; Mitsuoka, K.; Okamoto, S.; Yamada, Y. Experimental analysis of the fall mitigation motion caused by tripping based on the motion observation until shortly before ground contact. J. Biomech. Sci. Eng. 2019, 14, 18-00510. [Google Scholar] [CrossRef]
- Pijnappels, M.; Bobbert, M.F.; van Dieën, J.H. Push-off reactions in recovery after tripping discriminate young subjects, older non-fallers and older fallers. Gait Posture 2005, 21, 388–394. [Google Scholar] [CrossRef]
- Wang, W.F.; Lien, W.C.; Liu, C.Y.; Yang, C.Y. Study on tripping risks in fast walking through cadence-controlled gait analysis. J. Healthc. Eng. 2018, 2018, 2723178. [Google Scholar] [CrossRef]
- Akiyama, Y.; Fukui, Y.; Okamoto, S.; Yamada, Y. Effects of exoskeletal gait assistance on the recovery motion following tripping. PLoS ONE 2020, 15, e0229150. [Google Scholar] [CrossRef] [PubMed]
- Cordero, A.F.; Koopman, H.F.; Van der Helm, F. Multiple-step strategies to recover from stumbling perturbations. Gait Posture 2003, 18, 47–59. [Google Scholar] [CrossRef]
- Senden, R.; Savelberg, H.; Adam, J.; Grimm, B.; Heyligers, I.; Meijer, K. The influence of age, muscle strength and speed of information processing on recovery responses to external perturbations in gait. Gait Posture 2014, 39, 513–517. [Google Scholar] [CrossRef] [PubMed]
- Pavol, M.J.; Owings, T.M.; Foley, K.T.; Grabiner, M.D. Gait characteristics as risk factors for falling from trips induced in older adults. J. Gerontol. Ser. A Biomed. Sci. Med. Sci. 1999, 54, M583–M590. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Smeesters, C.; Hayes, W.C.; McMahon, T.A. The threshold trip duration for which recovery is no longer possible is associated with strength and reaction time. J. Biomech. 2001, 34, 589–595. [Google Scholar] [CrossRef]
- Klemetti, R.; Moilanen, P.; Avela, J.; Timonen, J. Effects of gait speed on stability of walking revealed by simulated response to tripping perturbation. Gait Posture 2014, 39, 534–539. [Google Scholar] [CrossRef]
- Jung, J.H.; Gutiérrez, I.; Veneman, J. The use of Centroidal momentum Analysis for defining a stability index for walking with an exoskeleton. In Proceedings of the TAR 2015: Technically Assisted Rehabilitation Conference, Berlin, Germany, 12–13 March 2015. [Google Scholar]
- van Ingen Schenau, G. Some fundamental aspects of the biomechanics of overground versus treadmill locomotion. Med. Sci. Sport. Exerc. 1980, 12, 257–261. [Google Scholar] [CrossRef]
- Stolze, H.; Kuhtz-Buschbeck, J.; Mondwurf, C.; Boczek-Funcke, A.; Jöhnk, K.; Deuschl, G.; Illert, M. Gait analysis during treadmill and overground locomotion in children and adults. Electroencephalogr. Clin. Neurophysiol. Electromyogr. Mot. Control 1997, 105, 490–497. [Google Scholar] [CrossRef]
- Riley, P.O.; Paolini, G.; Della Croce, U.; Paylo, K.W.; Kerrigan, D.C. A kinematic and kinetic comparison of overground and treadmill walking in healthy subjects. Gait Posture 2007, 26, 17–24. [Google Scholar] [CrossRef]
- Sessoms, P.H.; Wyatt, M.; Grabiner, M.; Collins, J.D.; Kingsbury, T.; Thesing, N.; Kaufman, K. Method for evoking a trip-like response using a treadmill-based perturbation during locomotion. J. Biomech. 2014, 47, 277–280. [Google Scholar] [CrossRef]
- Yoo, D.; Seo, K.H.; Lee, B.C. The effect of the most common gait perturbations on the compensatory limb’s ankle, knee, and hip moments during the first stepping response. Gait Posture 2019, 71, 98–104. [Google Scholar] [CrossRef] [PubMed]
- Fettrow, T.; Reimann, H.; Grenet, D.; Crenshaw, J.; Higginson, J.; Jeka, J. Walking cadence affects the recruitment of the medial-lateral balance mechanisms. Front. Sport. Act. Living 2019, 1, 40. [Google Scholar] [CrossRef] [Green Version]
- Troy, K.L.; Grabiner, M.D. The presence of an obstacle influences the stepping response during induced trips and surrogate tasks. Exp. Brain Res. 2005, 161, 343–350. [Google Scholar] [CrossRef] [PubMed]
- Van Dieen, J.H.; Pijnappels, M.; Bobbert, M. Age-related intrinsic limitations in preventing a trip and regaining balance after a trip. Saf. Sci. 2005, 43, 437–453. [Google Scholar] [CrossRef]
- Loan, P.; Delp, S.; Smith, K.; Blaikie, K. Software for Interactive Musculoskeletal Modeling User Guide 6.0; MusculoGraphics, Inc.: Evanston, IL, USA, 2011. [Google Scholar]
- Winter, D.A. Biomechanics and Motor Control of Human Movement; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Hof, A.; Gazendam, M.; Sinke, W. The condition for dynamic stability. J. Biomech. 2005, 38, 1–8. [Google Scholar] [CrossRef]
- Young, P.M.M.; Wilken, J.M.; Dingwell, J.B. Dynamic margins of stability during human walking in destabilizing environments. J. Biomech. 2012, 45, 1053–1059. [Google Scholar] [CrossRef] [Green Version]
- Wold, S.; Esbensen, K.; Geladi, P. Principal component analysis. Chemom. Intell. Lab. Syst. 1987, 2, 37–52. [Google Scholar] [CrossRef]
- Fay, M.P.; Proschan, M.A. Wilcoxon-Mann-Whitney or t-test? On assumptions for hypothesis tests and multiple interpretations of decision rules. Stat. Surv. 2010, 4, 1. [Google Scholar] [CrossRef]
- Neumann, D.A. Kinesiology of the Musculoskeletal System: Foundation for Rehabilitation; Elsevier: Mosby, MI, USA, 2010. [Google Scholar]
- Öberg, T.; Karsznia, A.; Öberg, K. Basic gait parameters: Reference data for normal subjects, 10–79 years of age. J. Rehabil. Res. Dev. 1993, 30, 210–223. [Google Scholar] [PubMed]
- Hak, L.; Houdijk, H.; Beek, P.J.; van Dieën, J.H. Steps to take to enhance gait stability: The effect of stride frequency, stride length, and walking speed on local dynamic stability and margins of stability. PLoS ONE 2013, 8, e82842. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kong, P.W.; Koh, T.M.; Tan, W.C.; Wang, Y.S. Unmatched perception of speed when running overground and on a treadmill. Gait Posture 2012, 36, 46–48. [Google Scholar] [CrossRef] [PubMed]
- Akiyama, Y.; Toda, H.; Ogura, T.; Okamoto, S.; Yamada, Y. Classification and analysis of the natural corner curving motion of humans based on gait motion. Gait Posture 2018, 60, 15–21. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition |
|---|---|
| Distance covered by each step (heel–heel) normalized by the subject’s height | |
| Time duration of each step | |
| Maximum knee flexion angle during each phase | |
| Maximum hip flexion angle during each phase | |
| Center of Mass (CoM) speed at the FS and SS in the traveling (Vt) and vertical (Vv) directions | |
| Margin of stability (MoS) at FS and SS in the traveling direction normalized by the subject’s height | |
| Maximum deceleration force in the traveling direction exerted on the stepping foot after the FS and SS normalized to the subject’s weight | |
| Maximum GRF of the stance leg in the vertical direction during each recovery phase normalized to the subject’s weight |
| Parameter | Unit | p-Value (* p < 0.05) | Hedgis-g | Slow (3.5 km/h) n = 60 | Fast (4.0 km/h) n = 69 |
|---|---|---|---|---|---|
| 0.22 | 0.22 | 0.44 (±0.08) | 0.42 (±0.08) | ||
| s | * 0.02 | 0.42 | 0.55 (±0.06) | 0.53 (±0.05) | |
| deg | 0.45 | 0.13 | 99.7 (±9.2) | 100.9 (±8.1) | |
| deg | 0.56 | 0.10 | 38.3 (±6.6) | 39.0 (±7.5) | |
| m/s | 0.30 | 0.18 | 1.26 (±0.10) | 1.28 (±0.11) | |
| m/s | 0.15 | 0.25 | −0.29 (± 0.16) | −0.34 (±0.20) | |
| * 0.01 | 0.49 | −0.06 (±0.07) | −0.09 (±0.07) | ||
| 0.52 | 0.11 | 0.25 (±0.11) | 0.25 (±0.09) | ||
| * 0.00 | 0.51 | 1.11 (±0.13) | 1.19 (±0.17) | ||
| 0.96 | 0.01 | 0.41 (±0.04) | 0.41 (±0.05) | ||
| s | * 0.01 | 0.48 | 0.54 (±0.05) | 0.52 (±0.05) | |
| deg | 0.16 | 0.25 | 69.7 (±4.3) | 71.1 (±6.6) | |
| deg | 0.76 | 0.05 | 28.8 (±5.4) | 29.1 (±6.1) | |
| m/s | 0.15 | 0.26 | 1.24 (±0.08) | 1.26 (±0.09) | |
| m/s | * 0.01 | 0.46 | −0.14 (±0.05) | −0.18 (±0.08) | |
| 0.10 | 0.29 | −0.02 (±0.07) | −0.04 (±0.07) | ||
| 0.08 | 0.32 | 0.23 (±0.06) | 0.25 (±0.07) | ||
| 0.10 | 0.29 | 1.37 (±0.35) | 1.47 (±0.32) |
| FS Sttime | FS Kang | FS Hang | FS CoMVt | FS CoMVv | FS MoSt | FS GRFt | FS GRFv | SS Stlength | SS Sttime | SS Kang | SS Hang | SS CoMVt | SS CoMVv | SS MoSt | SS GRFt | SS GRFv | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FS Stlength | 0.34 | 0.23 | 0.25 | 0.87 | −0.67 | 0.11 | 0.71 | 0.00 | 0.08 | 0.04 | 0.23 | −0.10 | −0.16 | −0.19 | 0.38 | 0.00 | 0.55 |
| FS Sttime | 0.50 | 0.03 | 0.36 | −0.23 | −0.01 | 0.31 | 0.02 | 0.00 | −0.07 | 0.17 | −0.07 | −0.05 | −0.18 | 0.07 | −0.01 | 0.24 | |
| FS Kang | 0.37 | 0.20 | −0.16 | 0.01 | 0.27 | 0.10 | −0.19 | −0.31 | 0.16 | 0.17 | −0.15 | −0.10 | 0.12 | 0.09 | 0.31 | ||
| FS Hang | 0.19 | −0.02 | −0.17 | 0.21 | 0.09 | 0.07 | −0.10 | 0.35 | 0.71 | 0.08 | −0.20 | −0.04 | 0.25 | 0.13 | |||
| FS CoMVt | −0.66 | −0.05 | 0.62 | 0.04 | 0.22 | −0.06 | 0.36 | −0.15 | 0.02 | −0.34 | 0.28 | 0.06 | 0.45 | ||||
| FS CoMVv | 0.10 | −0.61 | −0.19 | 0.07 | 0.21 | −0.26 | 0.23 | 0.13 | 0.40 | −0.16 | 0.12 | −0.71 | |||||
| FS MoSt | −0.09 | −0.14 | −0.28 | 0.15 | −0.19 | −0.24 | −0.40 | 0.21 | 0.85 | −0.07 | −0.14 | ||||||
| FS GRFt | 0.19 | 0.00 | 0.02 | 0.33 | 0.01 | −0.03 | −0.11 | 0.07 | 0.05 | 0.70 | |||||||
| FS GRFv | −0.15 | −0.07 | 0.21 | 0.13 | −0.08 | −0.26 | −0.17 | 0.22 | 0.34 | ||||||||
| SS Stlength | 0.33 | 0.22 | 0.09 | 0.83 | −0.31 | −0.06 | 0.51 | −0.07 | |||||||||
| SS Sttime | −0.01 | −0.16 | 0.12 | 0.19 | −0.11 | −0.04 | −0.23 | ||||||||||
| SS Kang | 0.42 | 0.23 | −0.41 | −0.05 | 0.25 | 0.30 | |||||||||||
| SS Hang | 0.17 | −0.03 | −0.16 | 0.23 | −0.02 | ||||||||||||
| SS CoMVt | −0.39 | −0.26 | 0.52 | −0.06 | |||||||||||||
| SS CoMVv | 0.01 | −0.56 | −0.32 | ||||||||||||||
| SS MoSt | 0.10 | 0.09 | |||||||||||||||
| SS GRFv | 0.19 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akiyama, Y.; Miyata, H.; Okamoto, S.; Yamada, Y. Effect of Gait Speed on Recovery Motion from Tripping on a Treadmill. Appl. Sci. 2021, 11, 7908. https://doi.org/10.3390/app11177908
Akiyama Y, Miyata H, Okamoto S, Yamada Y. Effect of Gait Speed on Recovery Motion from Tripping on a Treadmill. Applied Sciences. 2021; 11(17):7908. https://doi.org/10.3390/app11177908
Chicago/Turabian StyleAkiyama, Yasuhiro, Hazuki Miyata, Shogo Okamoto, and Yoji Yamada. 2021. "Effect of Gait Speed on Recovery Motion from Tripping on a Treadmill" Applied Sciences 11, no. 17: 7908. https://doi.org/10.3390/app11177908