
Construction of Artificial Forest Point Clouds by Laser SLAM Technology and Estimation of Carbon Storage




Abstract
:1. Introduction
2. Materials and Methods
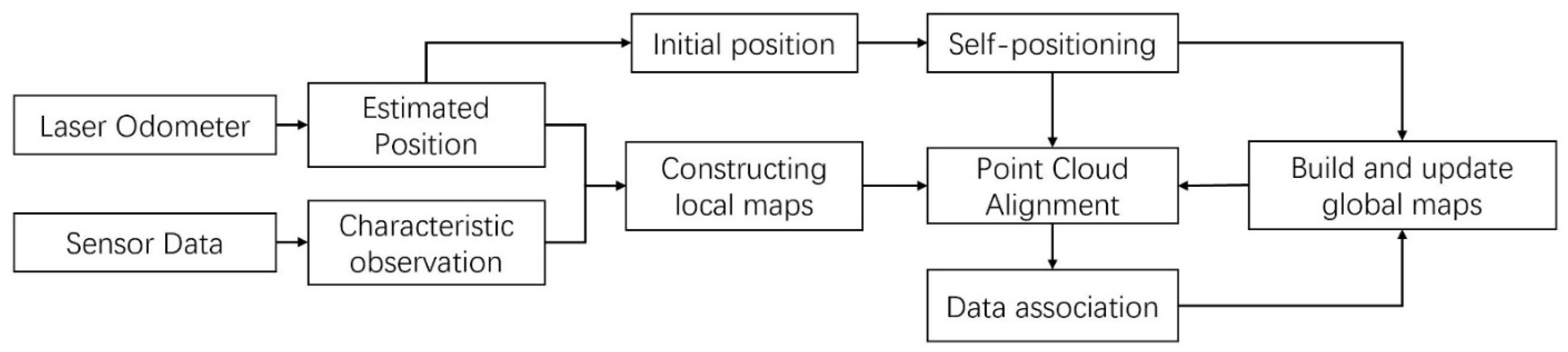
2.1. SLAM Technology 3D Reconstruction
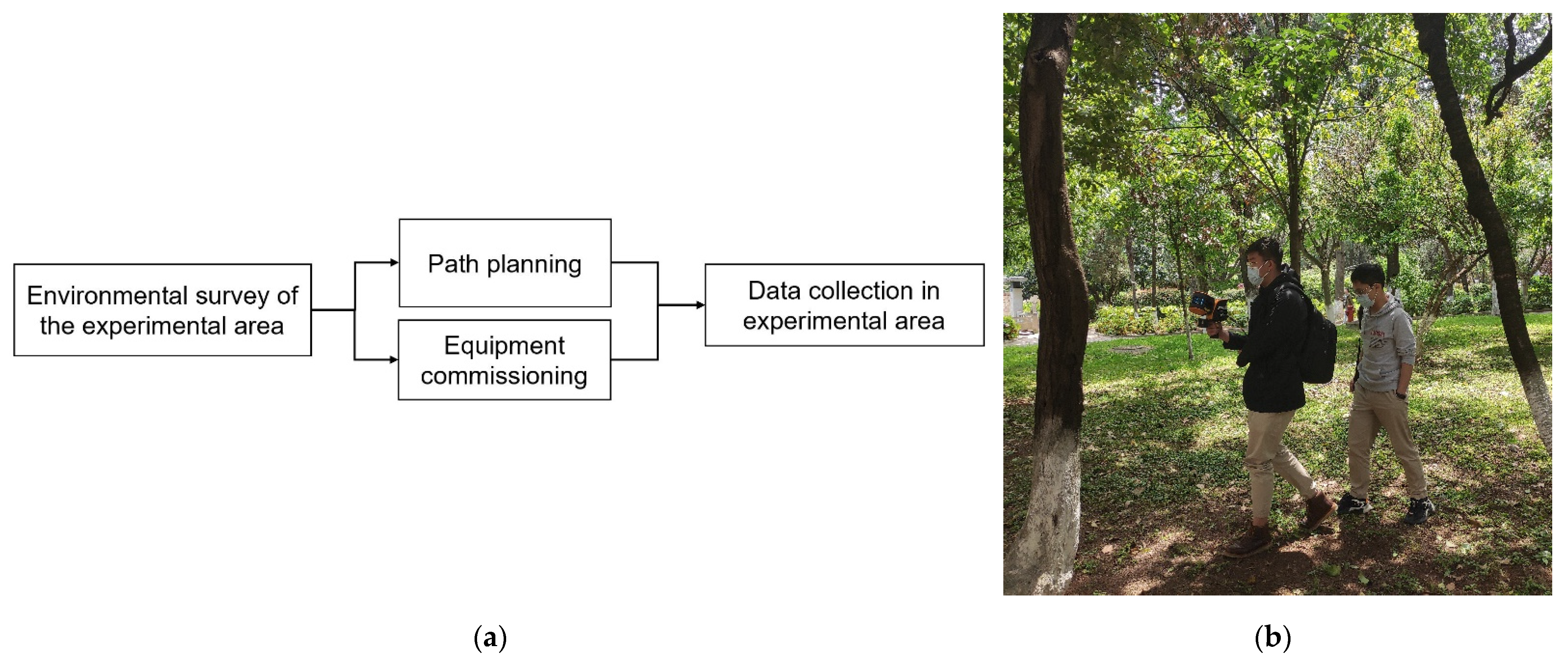
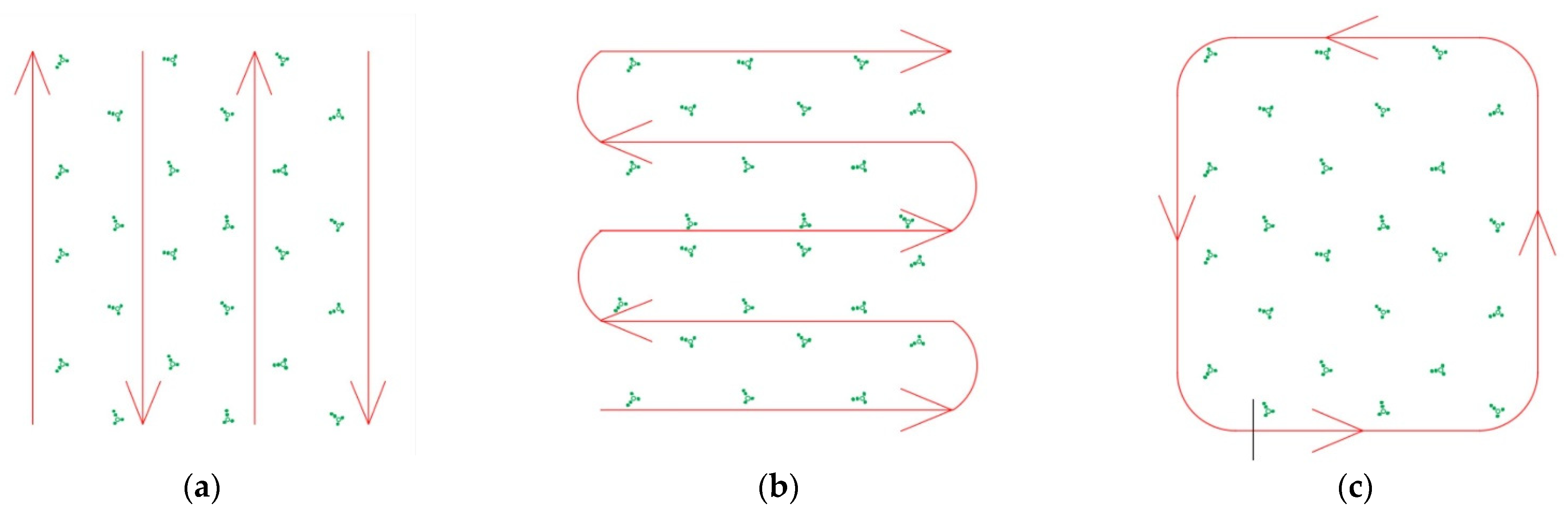
2.2. Data Acquisition and Processing
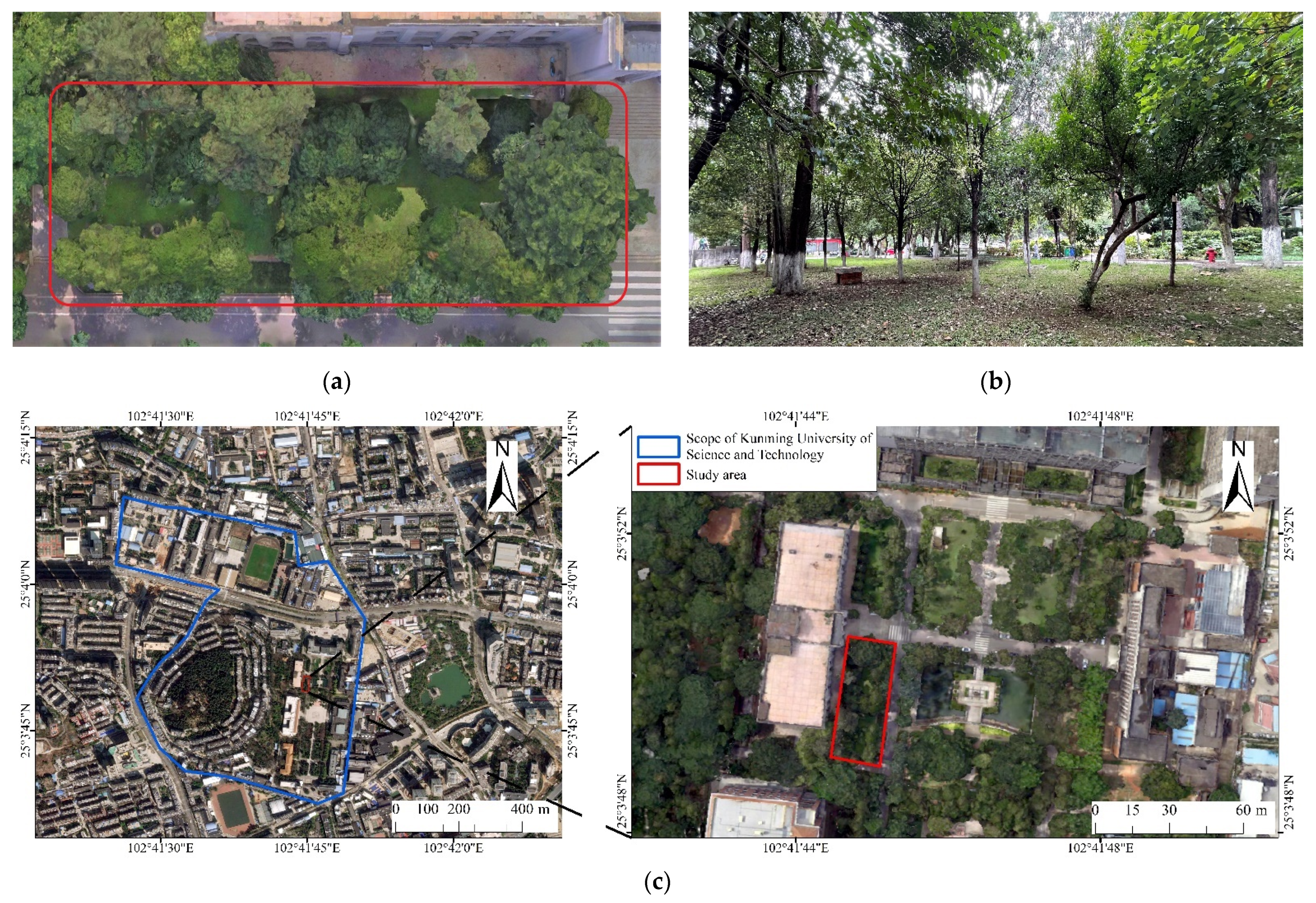
2.2.1. Overview of the Experimental Area
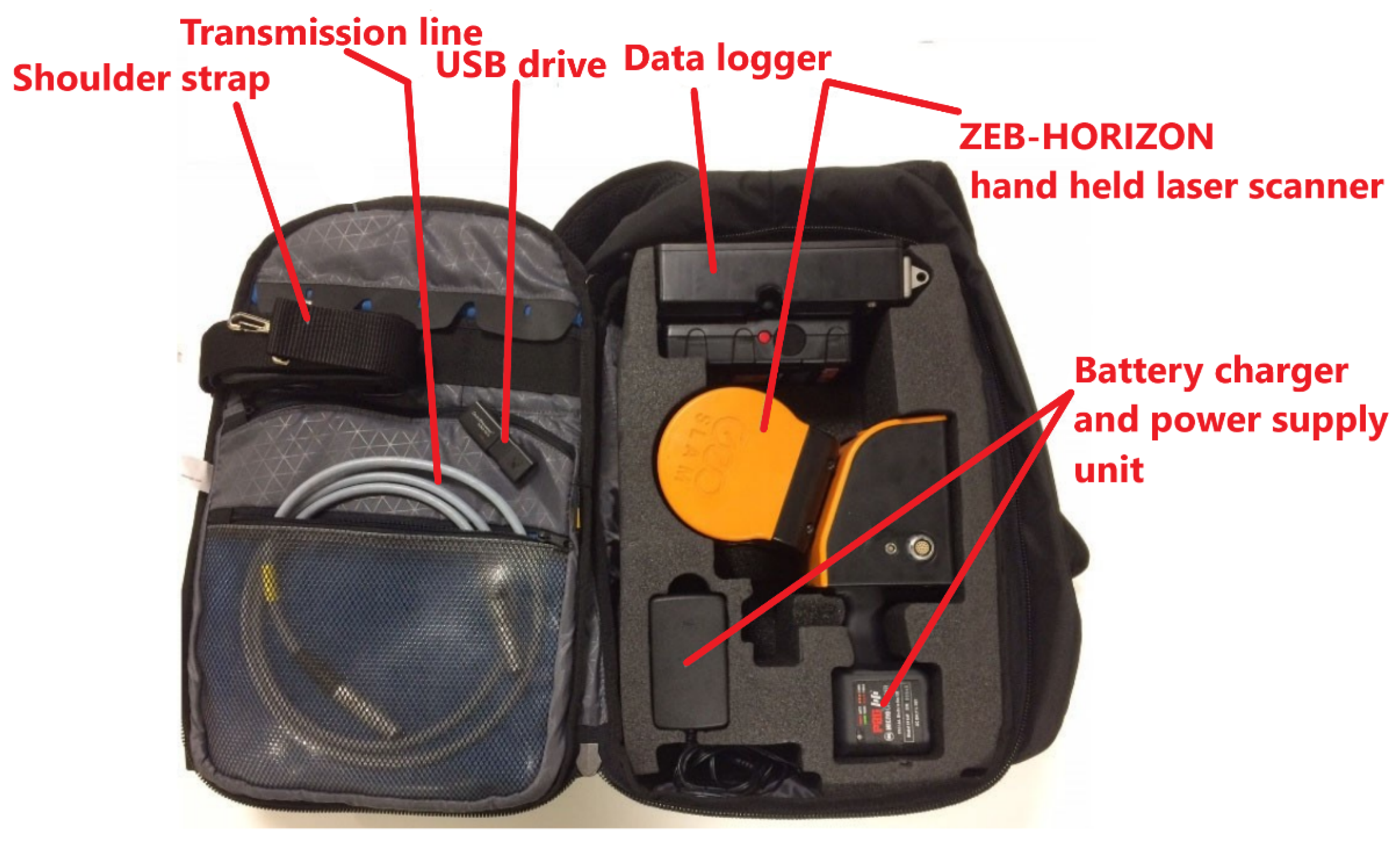
2.2.2. ZEB-HORIZON Data Acquisition
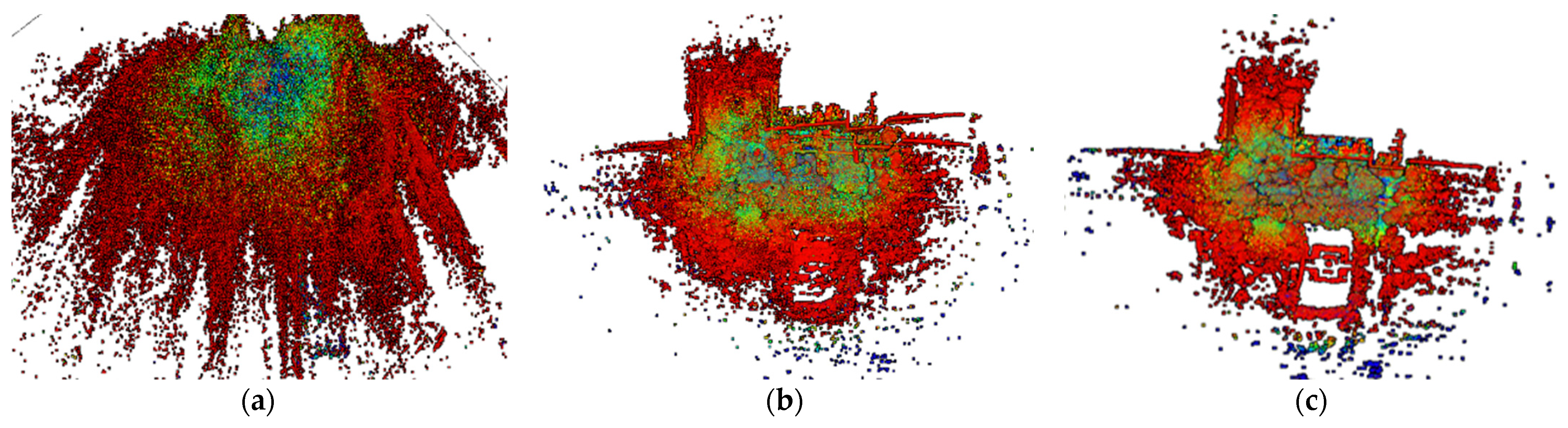
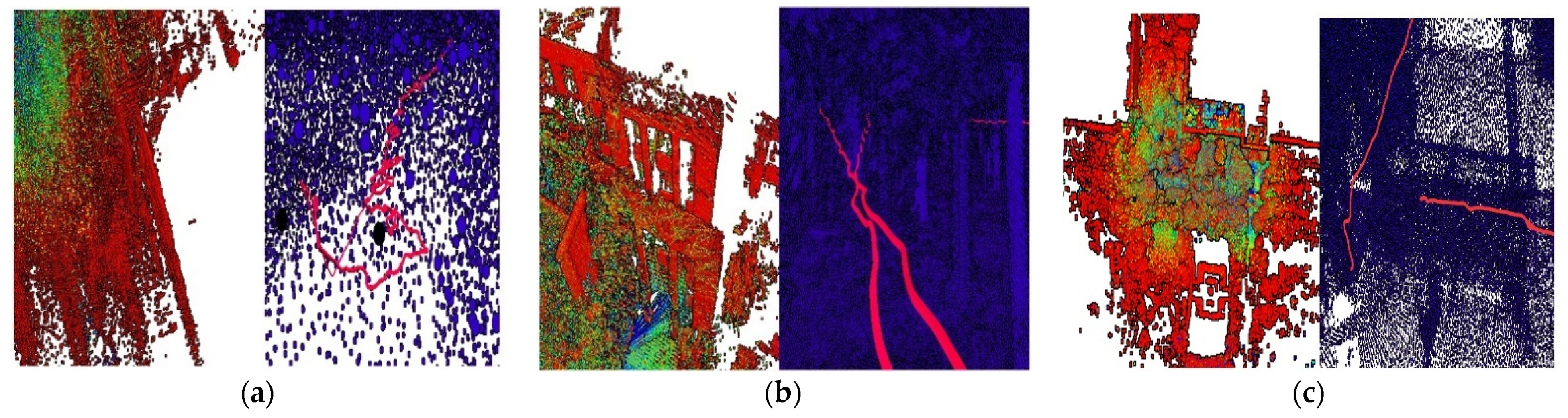
2.2.3. ZEB-HORIZON Data Processing
2.2.4. Livox Mid-40 Data Acquisition
2.2.5. Livox Mid-40 Data Processing
2.2.6. Data Fusion Processing
3. Result and Discussion Section
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Valérie, M.; Panmao, Z.; Anna, P.; Connors, S.L.; Clotilde, P.; Sophie, B.; Nada, C.; Chen, Y.; Goldfarb, L.; Gomis, M.I. Climate Change 2021—The Physical Science Basis. Chem. Int. 2021, 43, 22–23. [Google Scholar]
- United Nations. Adoption of the Paris Agreement: FCCC/CP/2015/L.9/Rev.1; Paris United Nations Framework Convention on Climate Change; United Nations: New York, NY, USA, 2015. [Google Scholar]
- He, J.J. From Kyoto Protocol to Paris Agreement: The Start of a New Climate Governance Age. Chin. Rev. Int. Law 2016, 3, 77–88. [Google Scholar]
- Ding, M.L.; Yang, X.N.; Zhao, R.X.; Zhang, Z.; Xiao, L.; Xie, Z. Optimization of territorial space pattern under the goal of carbon neutrality: Theoretical framework and practical strategy. J. Nat. Resour. 2022, 37, 1137–1147. [Google Scholar] [CrossRef]
- Li, N.Y.; Gong, Y.Z.; Zhang, S.D. Forestry Carbon Sequestration Projects in China—A Synergized Strategy of Mitigation, Adaptation and Sustainable Development. World For. Res. 2006, 19, 1. [Google Scholar]
- Qing, G.W.; Tian, M.H. The Development Opportunities and Implementation Path of Forestry Carbon Sequestration under the Target of Carbon Peak and Carbon Neutrality. Adm. Reform 2022, 01, 45–54. [Google Scholar]
- Tian, X.; Sohngen, B.; Kim, J.B.; Ohrel, S.; Cole, J. Global climate change impacts on forests and markets—ScienceDirect. For. Policy Econ. 2016, 72, 18–26. [Google Scholar]
- Xu, S.S. A Review of Forest Carbon Storage Estimation Methods. For. Inventory Plan. 2014, 39, 28–33. [Google Scholar]
- Guo, J.; Lu, M.Y.; Zhang, D.Y.; Aimeti, Y.P.; Qi, C. Application progress of sample land inventory method in forest carbon sink estimation. Prot. For. Sci. Technol. 2016, 154, 102–103. [Google Scholar]
- Zhao, H.; Zheng, Y.F.; Li, S.; Yuan, Y.; Huang, J.Q.; Liu, J.; Cao, J.C. Observation and simulation of CO2 and O3 fluxes in the winter wheat field based on micrometeorological method. China Environ. Sci. 2020, 40, 1038–1048. [Google Scholar]
- Liu, C.; Li, X. Carbon Storage and Sequestration by Urban Forests in Shenyang, China. Urban For. Urban Green. 2012, 11, 121–128. [Google Scholar] [CrossRef]
- Xueyan, Z. Quick Aboveground Carbon Stock Estimation of Densely Planted Shrubs by Using Point Clouds Derived from Unmanned Aerial Vehicle. Remote Sens. 2019, 11, 2914. [Google Scholar]
- Li, C.H. Nondestructive Estimation of Above-ground Carbon Storage in Campus Street Trees based on Terrestrial Laser Scanning. Hortic. Seed 2022, 42, 44–48. [Google Scholar]
- Chen, Z.; Liu, Q.; Li, C.; Li, M.; Zhou, X.; Yu, Z.; Su, K. Comparison in linear and nonlinear estimation models of carbon storage of plantations based on UAV LiDAR. J. Beijing For. Univ. 2021, 43, 9–16. [Google Scholar]
- Simard, M.; Pinto, N.; Fisher, J.B.; Baccini, A. Mapping forest canopy height globally with spaceborne lidar. J. Geophys. Res. Biogeosciences 2011, 116, G04021. [Google Scholar] [CrossRef] [Green Version]
- Turner, D.; Wallace, L.; Lucieer, A.; Watson, C. Development of a UAV-LiDAR System with Application to Forest Inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar]
- Sebastiano, S.; Antonino, M.; Gino, D.; Salvatore, L.V.D. Optimizing the Sampling Area across an Old-Growth Forest via UAV-Borne Laser Scanning, GNSS, and Radial Surveying. ISPRS Int. J. Geo. Inf. 2022, 11, 168. [Google Scholar]
- Tang, X.Z.; Liu, C.; Hu, X.Q.; Wang, C. Automatic extraction algorithm for buildings based on UAV lidar data. China Flood Drought Manag. 2015, 25, 67–71; 96. [Google Scholar]
- Durrantwhyte, H.F.; Bailey, T. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Singh, S. Low-drift and Real-time Lidar Odometry and Mapping. Auton. Robot. 2017, 41, 401–416. [Google Scholar] [CrossRef]
- Lin, J.; Zhang, F. Loam livox: A fast, robust, high-precision LiDAR odometry and mapping package for LiDARs of small FoV. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2019. [Google Scholar]
- Ou, Y.S.H.; Liu, Z.Y.; Zhao, Y.W.; Qin, S.R.; Liu, X. Research on 3D Laser SLAM Algorithm of Mobile Robot. Microprocessors 2020, 41, 58–64. [Google Scholar]
- Magnusson, M. The three-dimensional normal-distributions transform: An efficient representation for registration, surface analysis, and loop detection. Renew. Energy 2009, 28, 655–663. [Google Scholar]
- Li, R.X.; Zou, W. Research on Point Clouds Filtering Algorithm Based on PCL Library. Satell. TV IP Multimed. 2020, 13, 237–238. [Google Scholar]
- Kummerle, R.; Grisetti, G.; Strasdat, H.; Konolige, K.; Burgard, W. G2o: A general framework for graph optimization. In Proceedings of the IEEE International Conference on Robotics & Automation, Shanghai, China, 9–13 May 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar]
- Besl, P.; Mckay, H.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.C.; Gao, X.L.; Fu, C.; Yu, G.; Liu, Z. Estimation of carbon sequestration potential of forest biomass in China based on National Forest Resources Inventory. Acta Ecol. Sin. 2019, 39, 4002–4010. [Google Scholar]
- Kaartinen, H.; Hyyppä, J.; Yu, X.; Vastaranta, M.; Hyyppä, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F.; et al. An international comparison of individual tree detection and extraction using airborne laser scanning. Remote Sens. 2012, 4, 950–974. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.L.; Lin, H.; Sun, H.; Yan, E. Based on the ground of 3d laser scanning technology analysis of forest tree diameter at breast height extraction algorithm. J. Cent. South Univ. For. Technol. 2014, 34, 111–115. [Google Scholar]
- LY/T 2253-2014; The State Forestry Administration of the People’s Republic of China. In Guidelines on Carbon Accounting and Monitoring for Afforestation Project. China Forestry Publishing House: Beijing, China, 2014.
- Zhou, Y.R.; Yu, Z.L.; Zhao, S.D. Carbon storage and budget of major Chinese forest types. Chin. J. Plant Ecol. 2000, 24, 518–522. [Google Scholar]
- Cao, M.; Woodward, F.I. Net primary and ecosystem production and carbon stocks of terrestrial ecosystems and their responses to climate change. Glob. Change Biol. 1998, 4, 185–198. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | X | Y | Tree Height (/m) | DBH (/m) | Crown Diameter (/m) | Crown Area (/m2) | Crown Volume (/m3) |
|---|---|---|---|---|---|---|---|
| 1 | −6.639 | −23.901 | 9.157 | 0.26 | 6.753 | 35.82 | 152.966 |
| 2 | −17.512 | −41.595 | 8.176 | 0.377 | 4.142 | 13.473 | 10.274 |
| 3 | −14.129 | −45.489 | 13.973 | 0.281 | 7.054 | 39.083 | 137.76 |
| 4 | −16.541 | −31.945 | 9.601 | 0.13 | 6.254 | 30.724 | 174.715 |
| 5 | −12.915 | −17.261 | 8.824 | 0.181 | 5.85 | 26.879 | 131.372 |
| … | … | … | … | … | … | … | … |
| 34 | −10.108 | −11.903 | 8.16 | 0.142 | 5.421 | 23.085 | 119.332 |
| 35 | −11.635 | −47.423 | 13.084 | 0.121 | 5.829 | 26.683 | 155.889 |
| 36 | −6.769 | −1.802 | 16.007 | 0.335 | 12.502 | 122.75 | 702.865 |
| 37 | −7.792 | −4.054 | 7.746 | 0.22 | 3.379 | 8.965 | 34.196 |
| 38 | −0.715 | −1.318 | 12.776 | 0.319 | 13.53 | 143.768 | 748.378 |
| ID | Data Sources | H (/m) | D-Value (/m) | D (/m) | D-Value (/m) | Crown Diameter (/m) | D-Value (/m) |
|---|---|---|---|---|---|---|---|
| 9 | Manual measurement | 16.46 | 0 | 0.331 | 0 | 8.54 | 0 |
| SLAM | 16.39 | 0.09 | 0.337 | 0.005 | 8.65 | 0.11 | |
| 13 | Manual measurement | 7.81 | 0 | 0.174 | 0 | 5.63 | 0 |
| SLAM | 7.87 | 0.06 | 0.175 | 0.001 | 5.80 | 0.17 | |
| 15 | Manual measurement | 7.63 | 0 | 0.299 | 0 | 6.22 | 0 |
| SLAM | 7.71 | 0.08 | 0.304 | 0.005 | 6.15 | −0.07 | |
| 23 | Manual measurement | 5.61 | 0 | 0.149 | 0 | 6.05 | 0.02 |
| SLAM | 5.64 | 0.03 | 0.145 | 0.04 | 6.02 | 0.009 | |
| 36 | Manual measurement | 15.93 | 0 | 0.332 | 0 | 12.54 | 0 |
| SLAM | 16.01 | 0.08 | 0.335 | 0.003 | 12.50 | −0.04 |
| Biomass Grouping | Allometric Growth Equation | Biomass Grouping | Allometric Growth Equation |
|---|---|---|---|
| Tree trunk | Leaf | ||
| Branch | |||
| Aboveground biomass | Wood density: 0.460/tDM.m3 | ||
| Underground biomass | Total biomass | ||
| Biomass | Allometric Growth Equation | ||
|---|---|---|---|
| Aboveground biomass | Wood density: 0.478/tDM.m3 | ||
| Underground biomass | Total biomass | ||
| ID | H/m | D/cm | CS /kg | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 9.16 | 26.00 | 93.06 | 9.01 | 64.73 | 166.80 | 43.55 | 210.35 | 105.17 |
| 2 | 7.87 | 17.50 | 41.73 | 5.24 | 24.00 | 70.97 | 17.09 | 88.06 | 44.03 |
| 3 | 13.97 | 28.10 | 152.11 | 12.56 | 118.88 | 283.55 | 77.45 | 361.00 | 180.50 |
| … | … | … | … | … | … | … | … | … | … |
| 35 | 16.01 | 33.50 | 230.22 | 16.62 | 198.51 | 445.34 | 125.96 | 571.31 | 285.65 |
| 36 | 7.75 | 22.00 | 60.76 | 6.76 | 38.20 | 105.71 | 26.46 | 132.17 | 66.09 |
| 38 | 12.78 | 31.90 | 174.88 | 13.80 | 141.28 | 329.96 | 91.22 | 421.19 | 210.59 |
| Sum | 1284.03 | 134.13 | 887.86 | 2306.02 | 598.09 | 2904.11 | 1452.06 |
| ID | H/m | D/cm | CS/kg | |||
|---|---|---|---|---|---|---|
| 6 | 11.12 | 30.10 | 198.40 | 320.71 | 519.11 | 259.56 |
| 7 | 9.83 | 53.20 | 445.89 | 1109.49 | 1555.38 | 777.69 |
| 8 | 12.22 | 53.20 | 530.69 | 1351.61 | 1882.30 | 941.15 |
| … | … | … | … | … | … | … |
| 29 | 10.98 | 28.30 | 178.03 | 273.89 | 451.92 | 225.96 |
| 37 | 13.97 | 28.90 | 223.00 | 357.80 | 580.79 | 290.40 |
| 39 | 13.08 | 12.10 | 52.77 | 42.61 | 95.38 | 47.69 |
| Sum | 3645.84 | 6835.37 | 10481.21 | 5240.60 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tai, H.; Xia, Y.; Yan, M.; Li, C.; Kong, X. Construction of Artificial Forest Point Clouds by Laser SLAM Technology and Estimation of Carbon Storage. Appl. Sci. 2022, 12, 10838. https://doi.org/10.3390/app122110838
Tai H, Xia Y, Yan M, Li C, Kong X. Construction of Artificial Forest Point Clouds by Laser SLAM Technology and Estimation of Carbon Storage. Applied Sciences. 2022; 12(21):10838. https://doi.org/10.3390/app122110838
Chicago/Turabian StyleTai, Haoyu, Yonghua Xia, Min Yan, Chen Li, and XiaLi Kong. 2022. "Construction of Artificial Forest Point Clouds by Laser SLAM Technology and Estimation of Carbon Storage" Applied Sciences 12, no. 21: 10838. https://doi.org/10.3390/app122110838