
Resonance Suppression of a Maglev Inertially Stabilized Platform Based on an Improved Recursive Least Square Algorithm


Abstract
:1. Introduction
2. The MISP Structure
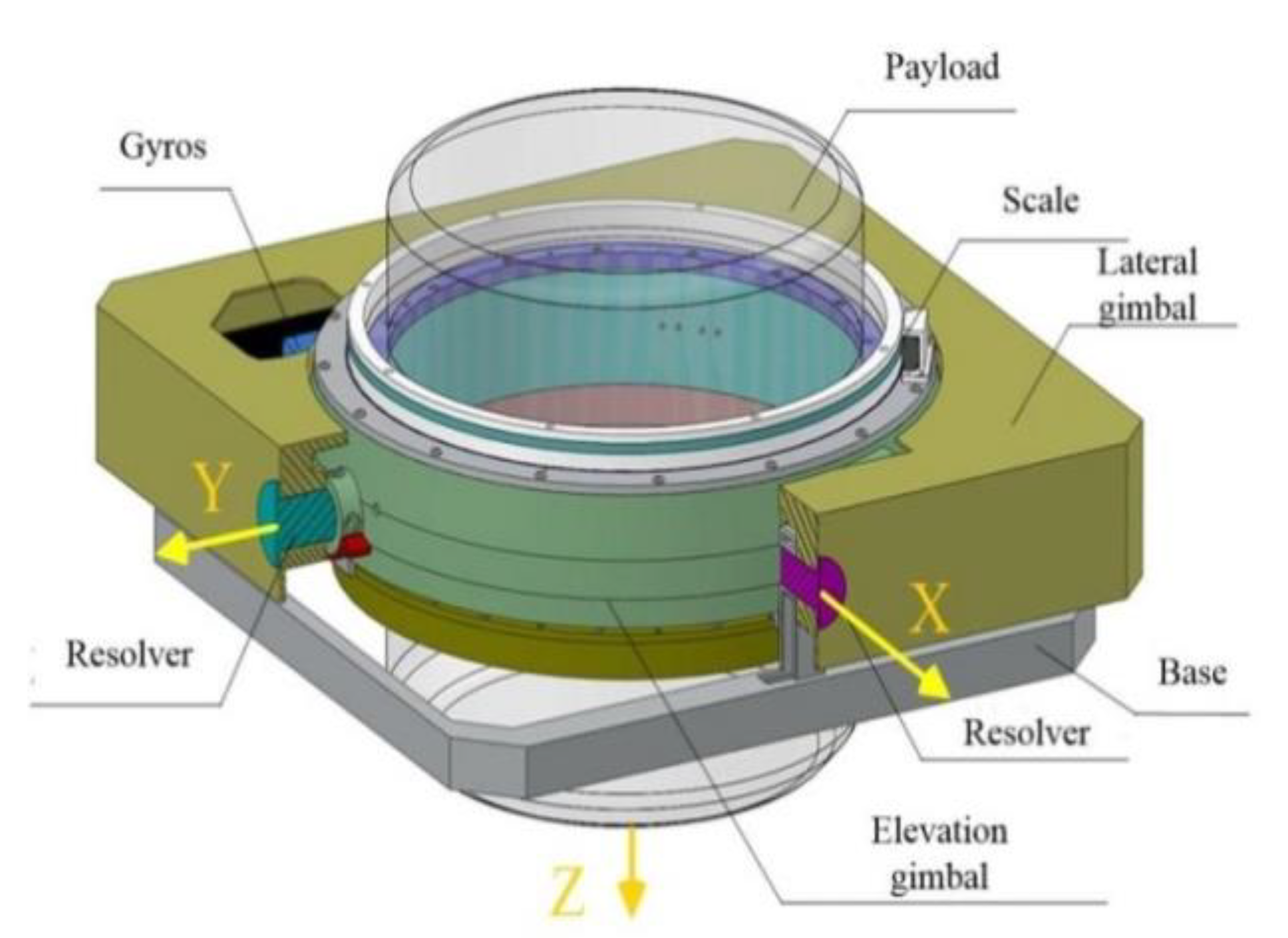
2.1. Introduction of MISP System
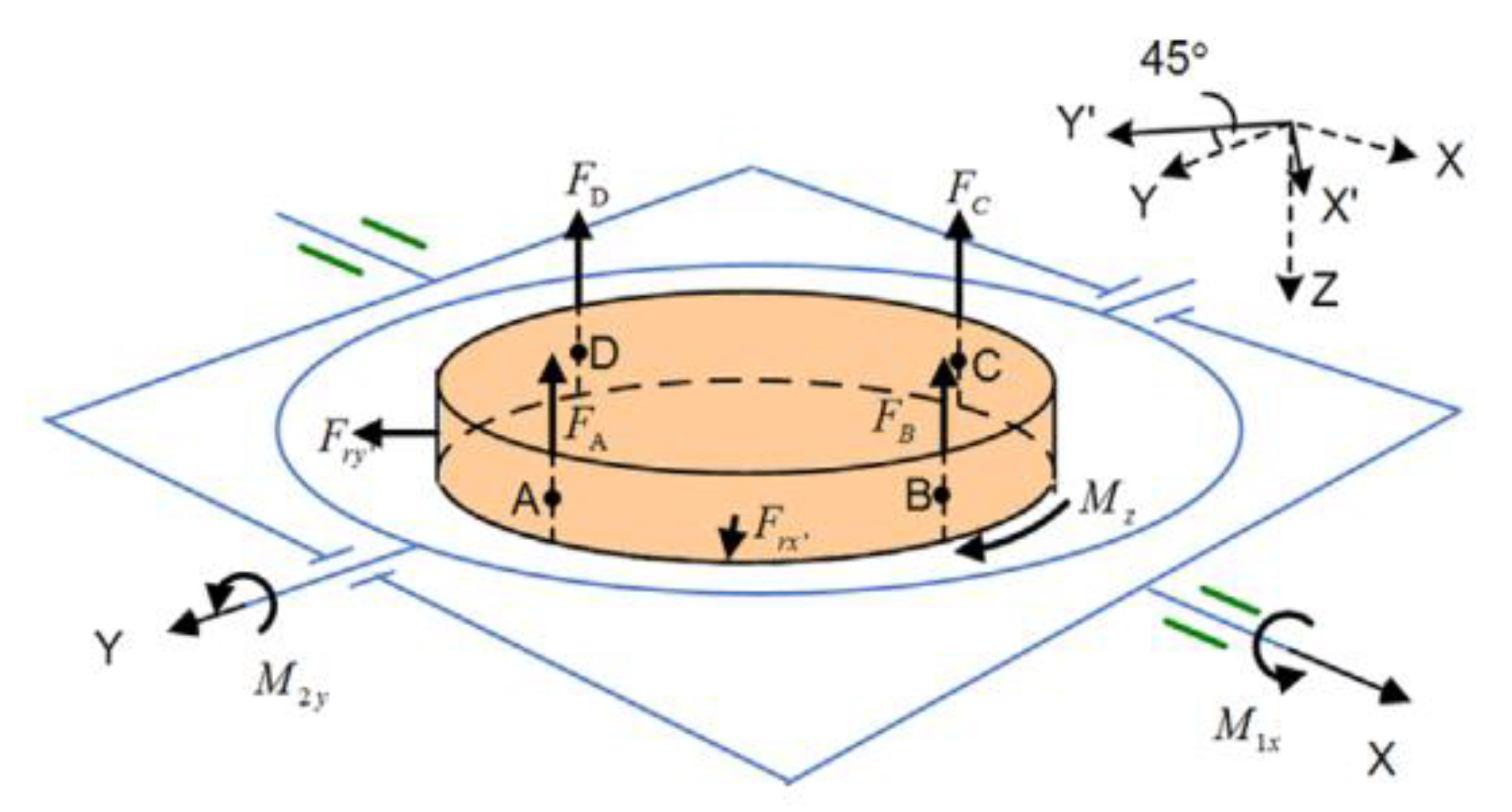
2.2. Transmission Structure
3. The MISP Structure
3.1. Proposed Improvement on RLS Algorithm
3.2. Adaptive Notch Filter
- Step 1: initialize ,,;
- Step 2: update ;
- Step 3: update , ;
- Step 4: update according to Equation (31);
- Step 5: update and ;
- Step 6: update .
4. Simulation and Analysis
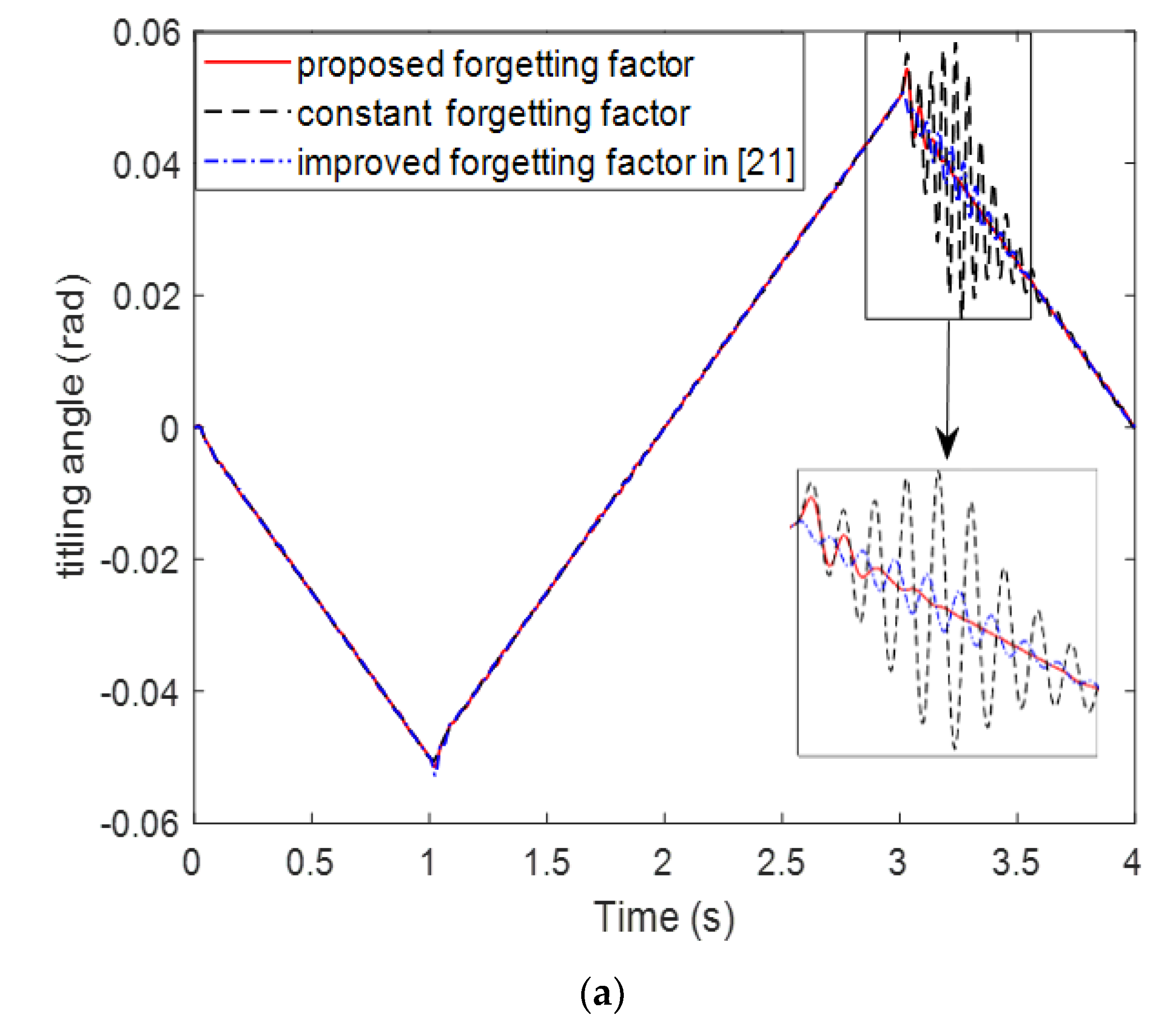
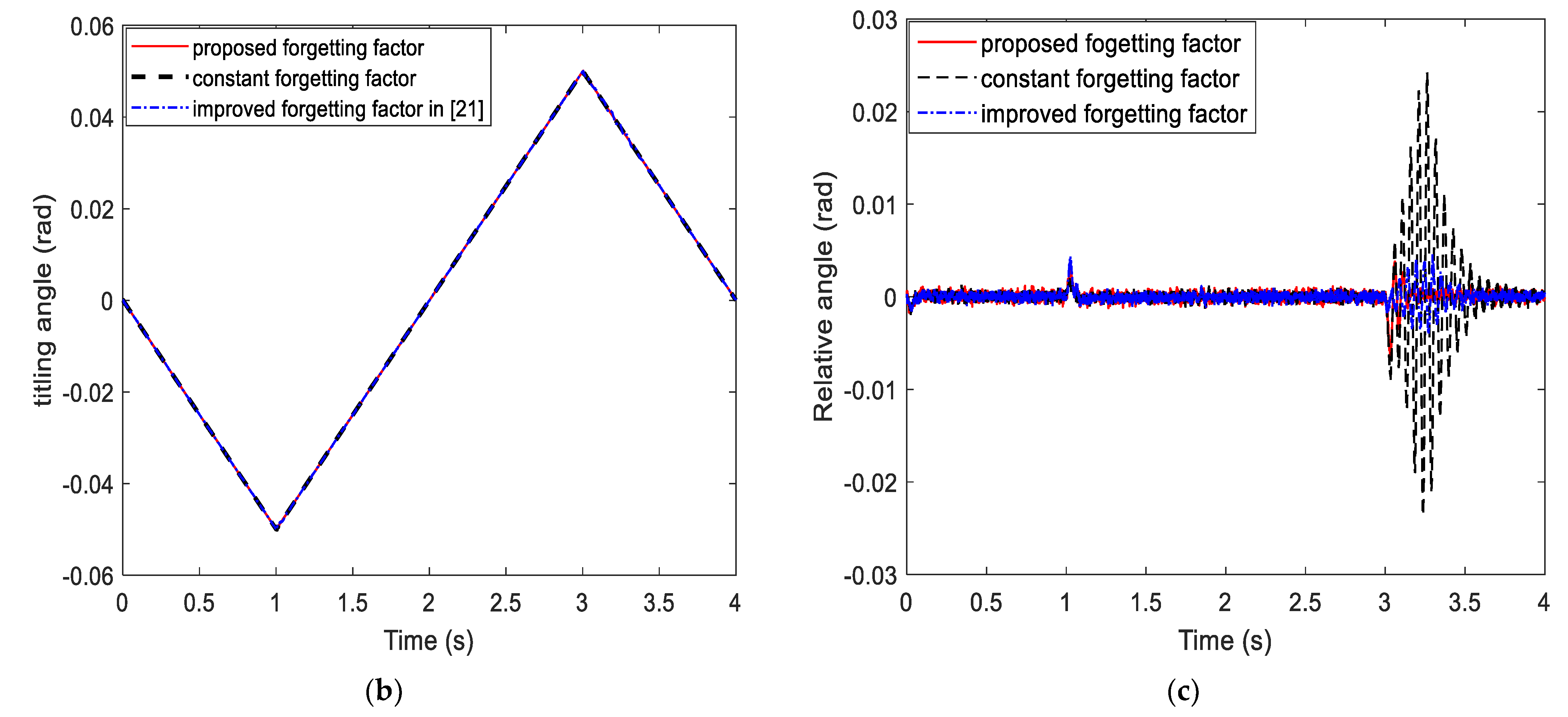
- Input 0.05 rad/s tilting signal to the frame, and the swing period lasted for 4 s.
- The tilting direction was changed at 1 and 3 s. It is assumed that clearance occurs in the gear rack during the direction turn around, and the transmission structure stiffness changes when N(A) is assumed to be 0.8 s and 0.5 s, respectively, which will result in a resonance frequency variable. Theoretically, the initial resonance frequency of the gimbal frame is 216 rad, which was changed to 193 rad and 164 rad.
- The RLS algorithm with a constant forgetting factor and an algorithm in [21] were used for comparison with the improved algorithm in the simulation. The constant forgetting factor is 0.99, and the forgetting factor in [21] is given aswhere the value of b, c is set according to the error . The simulation results are shown in Figure 7 and Figure 8.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ren, Z.; Stephens, L.S. Closed-loop performance of a six degree-of-freedom precision magnetic actuator. IEEE/ASME Trans. Mechatron. 2005, 10, 666–674. [Google Scholar] [CrossRef]
- Fang, J.; Wang, C.; Wen, T. Design and Optimization of a Radial Hybrid Magnetic Bearing with Separate Poles for Magnetically Suspended Inertially Stabilized Platform. IEEE Trans. Magn. 2014, 50, 1–11. [Google Scholar] [CrossRef]
- Trumper, D.L.; Olson, S.M.; Subrahmanyan, P.K. Linearizing control of magnetic suspension systems. IEEE Trans. Control. Syst. Technol. 1997, 5, 427–438. [Google Scholar] [CrossRef]
- Lin, Z.; Liu, K.; Zhang, W. Inertially Stabilized Platform for Airborne Remote Sensing Using Magnetic Bearings. IEEE/ASME Trans. Mechatron. 2016, 21, 288–301. [Google Scholar]
- Lin, Z.; Liu, K.; Zhang, L.; Zeng, D. Coupling effect and control strategies of the maglev dual-stage inertially stabilized system based on frequency-domain analysis. ISA Trans. 2016, 64, 98–112. [Google Scholar] [CrossRef] [PubMed]
- Javadi, A.; Pezeshki, S. A New Model-Free Adaptive Controller Versus Non-Linear H∞ Controller for Levitation of an Electromagnetic System. Trans. Inst. Meas. Control 2013, 35, 321–329. [Google Scholar] [CrossRef]
- Shi, W.; Liu, K.; Zhao, W. Active Vibration Isolation of a Maglev Inertially Stabilized Platform Based on an Improved Linear Extended State Observer. IEEE Access 2021, 9, 743–751. [Google Scholar] [CrossRef]
- Zhou, X.; Shi, Y.; Li, L.; Yu, R.; Zhao, L. A High Precision Compound Control Scheme Based on Non-singular Terminal Sliding Mode and Extended State Observer for an Aerial Inertially Stabilized Platform. Int. J. Control Autom. Syst. 2020, 18, 1498–1509. [Google Scholar] [CrossRef]
- Jia, T.; Li, X.-Z.; Zhang, X.-Y. Neural network sliding mode control for vehicle inertially stabilized platform. Control. Theory Appl. 2020, 38, 13–22. [Google Scholar] [CrossRef]
- Shin, H.; Choi, J.; Cho, H.; Hong, K. Effects of Mechanical Resonance on Vibrations of Mechanical Systems with Permanent Magnet Machines. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Yang, M.; Hao, L.; Xu, D. Fast identification of resonance characteristic for 2-mass system with elastic load. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014–ECCE ASIA), Hiroshima, Japan, 18–21 May 2014; pp. 3174–3178. [Google Scholar] [CrossRef]
- Wu, B.; Lu, S.; Ning, B.; Zhou, F.; Tang, X. Mechanical Resonance Suppression of Servo System Based on ADRC and MAFC. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 2447–2452. [Google Scholar] [CrossRef]
- Yang, M.; Zheng, W.; Yang, K.; Xu, D. Suppression of mechanical resonance using torque disturbance observer for two-inertia system with backlash. In Proceedings of the 2015 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia), Seoul, Korea, 1–5 June 2015; pp. 1860–1866. [Google Scholar] [CrossRef]
- Harnefors, L. Implementation of Resonant Controllers and Filters in Fixed-Point Arithmetic. IEEE Trans. Ind. Electron. 2009, 56, 1273–1281. [Google Scholar] [CrossRef]
- Kumagai, S.; Ohishi, K.; Miyazaki, T. High performance robot motion control based on zero phase error notch filter and D-PD control. In Proceedings of the 2009 IEEE International Conference on Mechatronics, Malaga, Spain, 14–17 April 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, Y.-S.; Lin, P.-Y.; Lin, Y.-D. A novel PLI suppression method in ECG by notch filtering with a modulation-based detection and frequency estimation scheme. Biomed. Signal Process. Control 2020, 62, 102150. [Google Scholar] [CrossRef]
- Yang, M.; Fu, Y.; Lv, X.; Xu, D. Mechanical resonance suppression in servo system based on the fractional order low-pass filter. In Proceedings of the 2015 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia), Seoul, Korea, 1–5 June 2015; pp. 594–599. [Google Scholar] [CrossRef]
- Wang, M.; Liu, X.; Dong, X.; Xiong, G.; Shen, Z.; Bai, R. A Novel Method to Detect and Suppress Mechanical Resonance for Servo System. In Proceedings of the 2016 9th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 10–11 December 2016; pp. 349–354. [Google Scholar] [CrossRef]
- Li, N.; Li, S. Suppression of servo system mechanical resonance based on adaptive IIR notch filter. In Proceedings of the 27th Chinese Control and Decision Conference (2015 CCDC), Qingdao, China, 23–25 May 2015; pp. 3418–3423. [Google Scholar] [CrossRef]
- Paleologu, C.; Benesty, J.; Ciochina, S. A Robust Variable Forgetting Factor Recursive Least-Squares Algorithm for System Identification. IEEE Signal Processing Lett. 2008, 15, 597–600. [Google Scholar] [CrossRef]
- Wang, Y.; Li, C.; Tian, C. Modified recursive least squares algorithm for sparse system identification. In Proceedings of the 2015 7th International Conference on Modelling, Identification and Control (ICMIC), Sousse, Tunisia, 18–20 December 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Benesty, J.; Rey, H.; Vega, L.R.; Tressens, S. A Nonparametric VSS NLMS Algorithm. IEEE Signal Proces. Lett. 2006, 13, 581–584. [Google Scholar] [CrossRef]
- Albu, F. Improved variable forgetting factor recursive least square algorithm. In Proceedings of the 2012 12th International Conference on Control Automation Robotics & Vision (ICARCV), Guangzhou, China, 5–7 December 2012; pp. 1789–1793. [Google Scholar] [CrossRef]
- Dong, S.; Yu, L.; Zhang, W.-A.; Chen, B. Robust extended recursive least squares identification algorithm for Hammerstein systems with dynamic disturbances. Digit. Signal Process. 2020, 101, 102716. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Equivalent inertia of motor and reducer | m0 | 0.0432 | kg/m2 |
| Inertia of gimbal frame | M | 3.2 | kg/m2 |
| Inertia of platform | m | 1.6 | kg/m2 |
| Negative stiffness | k | 50,000 | Nm/rad |
| Parameter about forgetting factors | α | 0.5 | _ |
| Weighting factors | β | 0.67 | _ |
| Stiffness of transmission shaft | K | 2000 | _ |
| Damping of transmission shaft | Cw | 1 | _ |
| IIR filter bandwidth parameter | ρ | 0.9 | _ |
| Time step | Ts | 0.001 | s |
| Coarse system controller | kp | 5833 | _ |
| i | 2 | _ | |
| d | 0.03 | _ | |
| Fine system controller | Kp | 300,000 | _ |
| I | 100 | _ | |
| D | 0.003 | _ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, W.; Liu, K.; Wei, J. Resonance Suppression of a Maglev Inertially Stabilized Platform Based on an Improved Recursive Least Square Algorithm. Appl. Sci. 2022, 12, 3362. https://doi.org/10.3390/app12073362
Shi W, Liu K, Wei J. Resonance Suppression of a Maglev Inertially Stabilized Platform Based on an Improved Recursive Least Square Algorithm. Applied Sciences. 2022; 12(7):3362. https://doi.org/10.3390/app12073362
Chicago/Turabian StyleShi, Wanfa, Kun Liu, and Jingbo Wei. 2022. "Resonance Suppression of a Maglev Inertially Stabilized Platform Based on an Improved Recursive Least Square Algorithm" Applied Sciences 12, no. 7: 3362. https://doi.org/10.3390/app12073362