
Study of the Movement Dynamics of a Beet Leaves Harvester

 ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
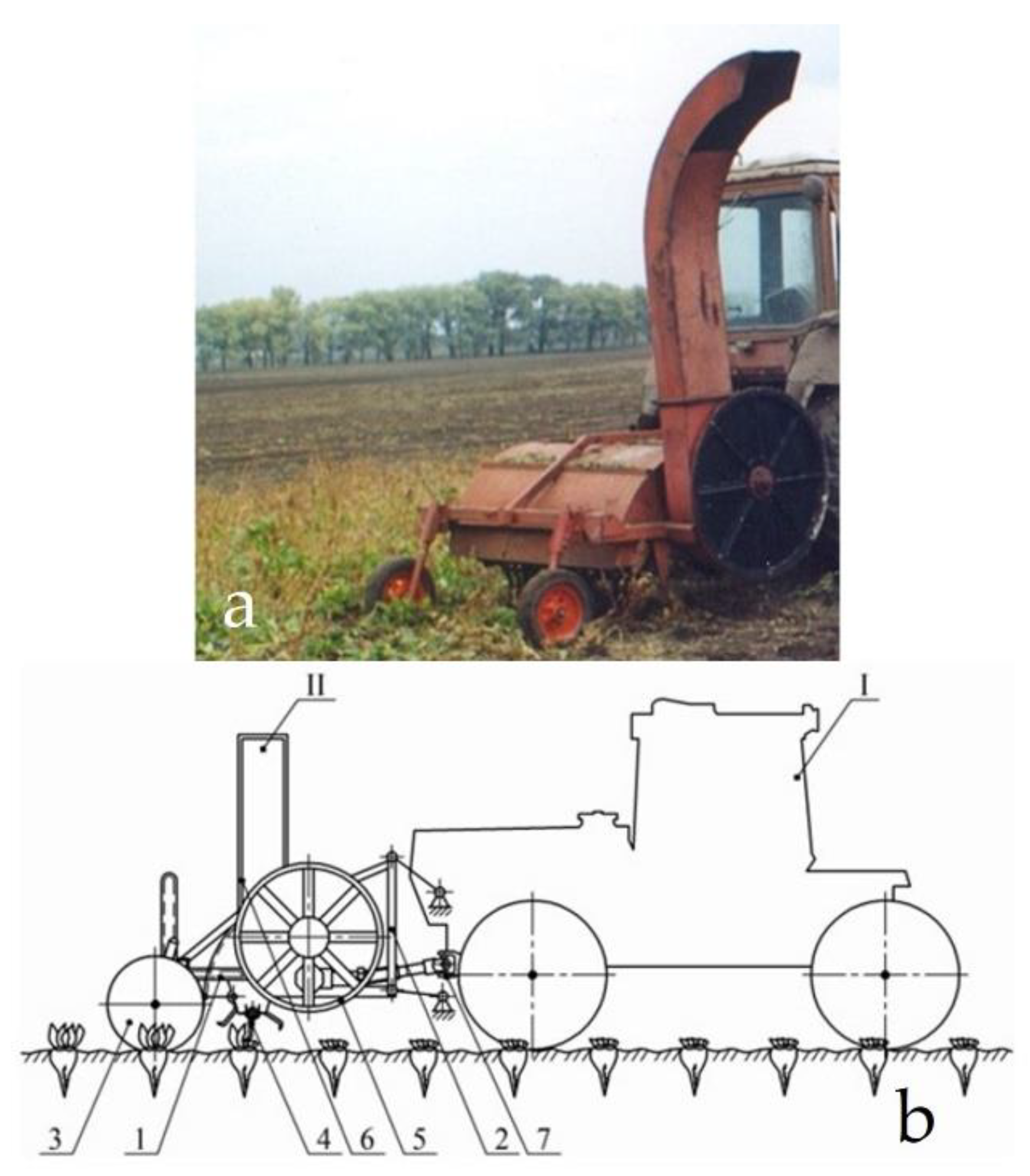
2.1. The Developed Front-Mounted Beet Leaves Harvester
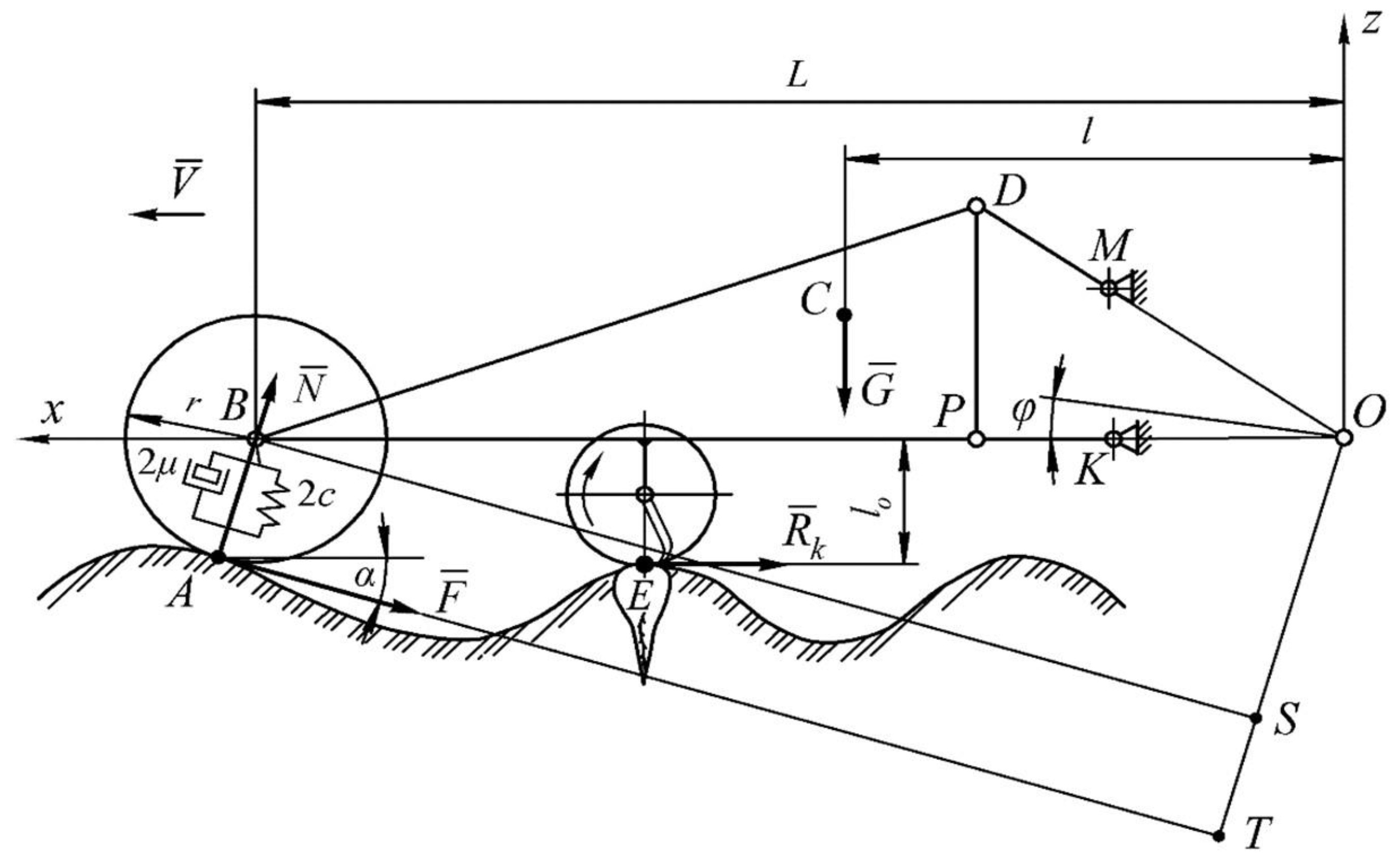
2.2. Theoretical Premises
- h [m]: soil surface irregularity current ordinate.
- [m]: amplitude of oscillations (step) of soil surface unevenness.
- [m]: the period of oscillations (step) of soil surface i unevenness.
- [m]: the current abscissa of soil surface unevenness.
- [m s−1] is the forward speed of the leaves harvester.
- the normal and tangential ground reactions, applied at the point of contact A of the feeler wheel with an uneven soil surface (f is the resistance factor of the feeler wheel rolling over the ground surface);
- the weight of the front-mounted pick-up leaves harvester applied in its centre of gravity;
- the resistance reaction of the rotary cutter bar to cutting the leaves.
2.3. Mathematical Model
- T: kinetic energy of the considered dynamic system.
- : generalized force.
- P: potential energy of the system.
- R: dissipative function (Rayleigh function).
- : generalized coordinate.
- : the generalized speed.
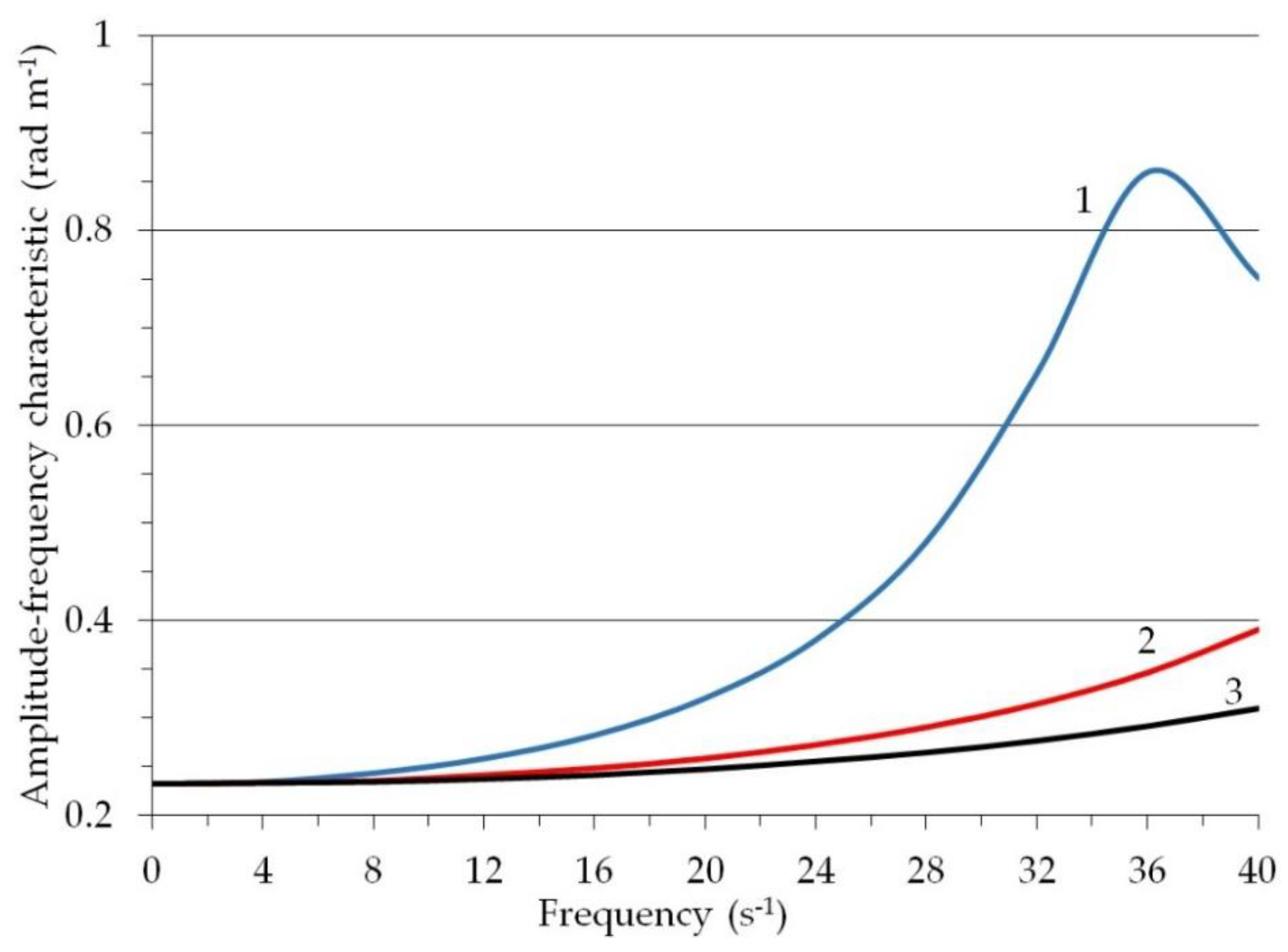
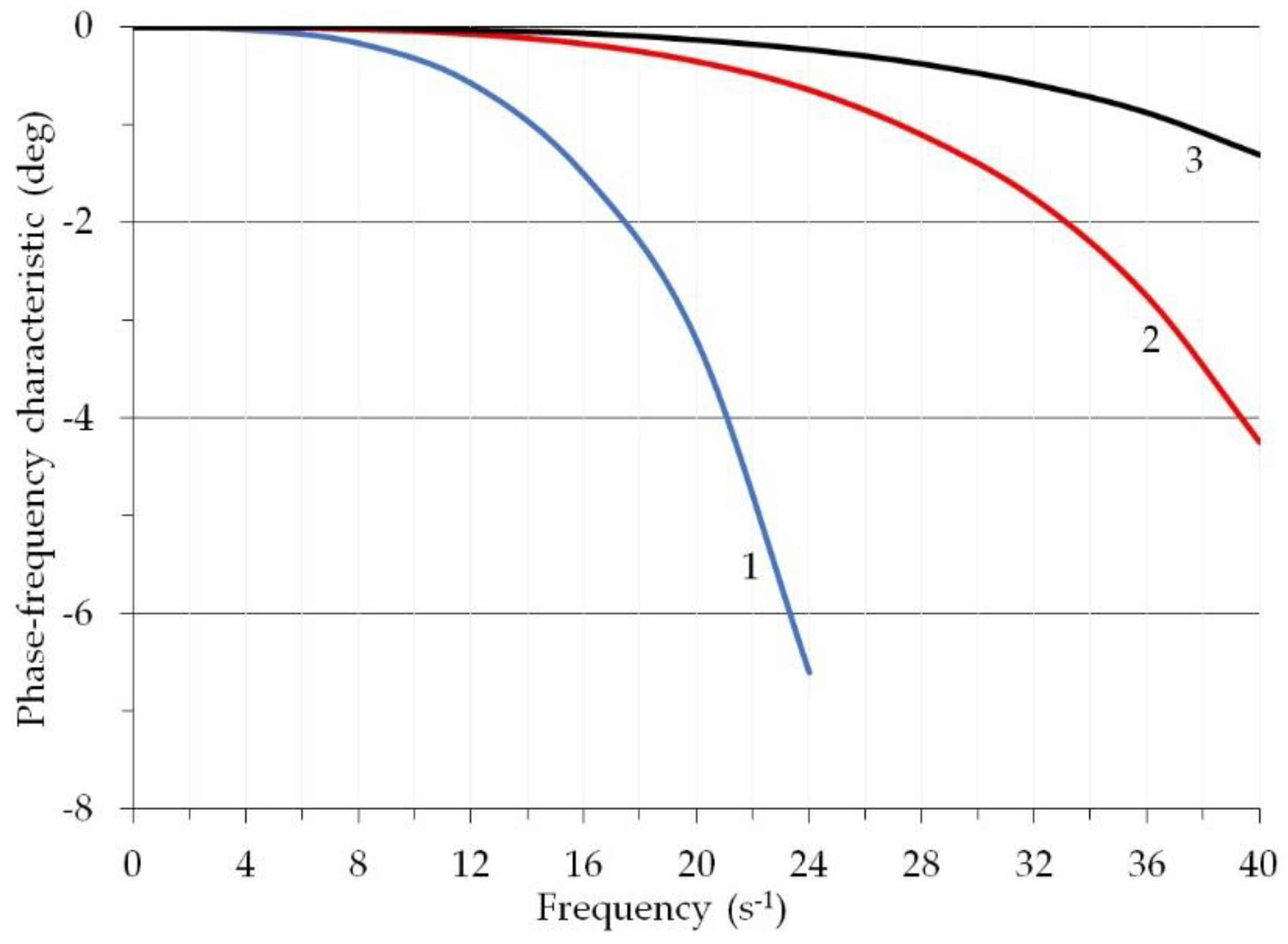
3. Results and Discussion
- [Pa] is the inflation pressure in the tyre.
- [m] is the free radius of an unloaded tyre.
- [m] is the radius of the tyre in its cross section.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Galvagno, A.; Chiodo, V.; Urbani, F.; Freni, F. Biogas as hydrogen source for fuel cell applications. Int. J. Hydrogen Energy 2013, 38, 3913–3920. [Google Scholar] [CrossRef]
- Theuerl, S.; Herrmann, C.; Heiermann, M.; Grundmann, P.; Landwehr, N.; Kreidenweis, U.; Prochnow, A. The Future Agricultural Biogas Plant in Germany: A Vision. Energies 2019, 12, 396. [Google Scholar] [CrossRef] [Green Version]
- Blanco, I.; Anifantis, A.S.; Pascuzzi, S.; Scarascia Mugnozza, G. Hydrogen and renewable energy sources integrated system for greenhouse heating. J. Agric. Eng. 2013, 44, 226–230.e45. [Google Scholar] [CrossRef]
- Pascuzzi, S.; Cerruto, E. An innovative pneumatic electrostatic sprayer useful for tendone vineyards. J. Agric. Eng. 2015, 46, 123–127. [Google Scholar] [CrossRef] [Green Version]
- Bulgakov, V. Sugar-Beet Harvesting Machines, 1st ed.; Agrarnaya Nauka: Kyiv, Ukraine, 2011; pp. 104–109. (In Russian) [Google Scholar]
- Guerrieri, A.S.; Anifantis, A.S.; Santoro, F.; Pascuzzi, S. Study of a Large Square Baler with Innovative Technological Systems that Optimize the Baling Effectiveness. Agriculture 2019, 9, 86. [Google Scholar] [CrossRef] [Green Version]
- Bell, B.; Rickatson, M. Farm Machinery, 6th ed.; 5m Publishing Ltd.: Sheffield, UK, 2015; pp. 217–223. [Google Scholar]
- Bulgakov, V.; Pascuzzi, S.; Holovach, I.; Olt, J.; Adamchuk, V.; Santoro, F. Theory of Vibrating Lifting Tools of Sugar Beet Harvesters, 1st ed.; MDPI: Basel, Switzerland, 2021; pp. 3–218. [Google Scholar] [CrossRef]
- Bzowska-Bakalarz, M.; Ostroga, K. The capacity of sugar beet farms‘ machinery and equipment. J. Cent. Eur. Agric. 2012, 13, 769–781. [Google Scholar] [CrossRef]
- Finkenstadt, V. A Review on the Complete Utilization of the Sugarbeet. Sugar Tech 2013, 16, 339–346. [Google Scholar] [CrossRef]
- Bulgakov, V.; Adamchuk, V.; Nozdrovicky, L.; Ihnatiev, Y. Theory of Vibrations of Sugar Beet Leaf Harvester Front-Mounted on Universal Traktor. Acta Technol. Agric. 2017, 20, 96–103. [Google Scholar]
- Vasilenko, P. Introduction to Agricultural Mechanics, 1st ed.; Agricultural Education: Kyiv, Ukraine, 1996; pp. 88–98. [Google Scholar]
- Bulgakov, V. Beet-Harvesting Machines, 1st ed.; Agrarian Science: Kyiv, Ukraine, 2011; p. 351. [Google Scholar]
- Pascuzzi, S.; Anifantis, A.S.; Santoro, F. The concept of a compact profile agricultural tractor suitable for use on specialised tree crops. Agriculture 2020, 10, 123. [Google Scholar] [CrossRef] [Green Version]
- Ihnatiev, Y. Theoretical research and development of new design of beet tops harvesting machinery. In Proceedings of the 5th International Science Congress “Agricultural machinery”, Varna, Bulgaria, 22–25 June 2017; Volume 1, pp. 46–48. [Google Scholar]
- Bulgakov, V.; Adamchuk, V.; Ivanovs, S.; Ihnatiev, Y. Theoretical investigation of aggregation of top removal machine frontally mounted on wheeled tractor. Eng. Rural. Dev. Jelgava 2017, 16, 273–280. [Google Scholar]
- Mawla, H.A.; Yehia, I.; El Lithy, A.M.; Faisal, A. An appropriate sugar-beet harvesting mechanization for big-scale project. MISR J. Agric. Eng. 2012, 29, 1213–1238. [Google Scholar] [CrossRef]
- Bulgakov, V.; Pascuzzi, S.; Ivanovs, S.; Santoro, F.; Anifantis, A.S.; Ihnatiev, I. Performance Assessment of Front-Mounted Beet Topper Machine for Biomass Harvesting. Energies 2020, 13, 3524. [Google Scholar] [CrossRef]
- Adamchuk, V.V.; Bulgakov, V.M.; Nadykto, V.T.; Kyurchev, V.M.; Ignatiev, E.I. Study of non-linearity of rows of soaked crops using a new indicator. Bull. Agrar. Sci. 2021, 8, 49–56. [Google Scholar]
- Bulgakov, V.; Pascuzzi, S.; Adamchuk, V.; Ivanovs, S.; Pylypaka, S. A theoretical study of the limit path of the movement of a layer of soil along the plough mouldboard. Soil Till. Res. 2019, 195, 104406. [Google Scholar] [CrossRef]
- Bulgakov, V.M.; Yaremenko, V.V.; Chernysh, O.M. Theoretical Mechanics, 1st ed.; Center for Educational Literature: Kyiv, Ukraine, 2019; p. 705. [Google Scholar]
- Zhou, L.; Moradi, Z.; Al-Tamimi, H.M.; Ali, H.E. On propagation of elastic waves in an embedded sigmoid functionally graded curved beam. Steel Compos. Struct. 2022, 44, 17–31. [Google Scholar] [CrossRef]
- Fang, Z.; Zhu, Z.; Wu, P.; Moradi, Z. Vibration and damping analysis of sandwich electrorheological fluid deep arches with bi-directional FGM containers. Eng. Struct. 2023, 276, 115325. [Google Scholar] [CrossRef]
- Bulgakov, V.; Pascuzzi, S.; Beloev, H.; Ivanovs, S. Theoretical Investigations of the Headland Turning Agility of a Trailed Asymmetric Implement-and-Tractor Aggregate. Agriculture 2019, 9, 224. [Google Scholar] [CrossRef] [Green Version]
- Bronstein, I.N.; Semendyaev, K.A. Handbook of Mathematics for Engineers and Students of Higher Educational Institutions, 1st ed.; Lan Publishing House: St. Petersburg, Russia, 2010; p. 608. [Google Scholar]
- Rotach, V.Y. Theory of Automatic Control, 1st ed.; MPEI Publishing House: Moscow, Russia, 2008; p. 396. [Google Scholar]
- Lurie, A.B. Statistical Dynamics of Agricultural Aggregates, 1st ed.; Kolos: Leningrad, Russia, 1980; p. 376. [Google Scholar]
- Guskov, V.V.; Velevm, N.N.; Atamanov, Y.E.; Bocharov, N.F.; Ksenevich, I.P.; Solonsky, A.S. Tractors. Theory, 1st ed.; Mashinostroenie: Moscow, Russia, 1988; p. 376. [Google Scholar]
- Bulgakov, V.; Pascuzzi, S.; Ivanovs, S.; Nadykto, V.; Nowak, J. Kinematic discrepancy between driving wheels evaluated for a modular traction device. Biosyst. Eng. 2020, 196, 88–96. [Google Scholar] [CrossRef]
- Gyachev, L.V. Sustainability of Movement of Agricultural Machines and Aggregates, 1st ed.; Mashinostroenie: Moscow, Russia, 1981; p. 206. [Google Scholar]
- Nadykto, V.T. Peculiarities of aggregating frontal guns. Agric. Mach. technol. 2011, 8, 8–11. [Google Scholar]
- Battiato, A.; Diserens, E. Influence of Tyre Inflation Pressure and Wheel Load on the Traction Performance of a 65 kW MFWD Tractor on a Cohesive Soil. J. Agric. Sci. 2013, 5, 197–215. [Google Scholar] [CrossRef]
- Prikner, P.; Kotek, M.; Jindra, P.; Pražan, R. Field compaction capacity of agricultural tyres. Agron. Res. 2017, 15, 806–816. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Unit | Value |
|---|---|---|
| Machine weight with haulm () | N | 9300 |
| Operating forward speed () | m·s−1 | 2.2–2.5 |
| Performance | ha·h−1 | 1.08–1.35 |
| Beet leaves harvester inertia moment (Ioy) | kg·m2 | 3250 |
| Tyres for support feeler wheels | - | 7.50R16 |
| Radius for support feeler wheels | m | 0.365 |
| Inflation pressure of the support feeler wheels tyres | MPa | 0.125 |
| Stiffness coefficient (c) of the support feeler wheels tyres | kN·m−1 | 315 |
| Damping coefficient (μ) of the support feeler wheels tyres | kN·s·m−1 | 0.85 |
| Rotor radius of the leaves cutter | m | 0.30 |
| Distance from the machine suspension axis to the axis of the support feeler wheels (L) | m | 4.3 |
| Distance from the machine suspension axis to the centre of gravity (L-l) | m | 3.0 |
| Soil profile fluctuation amplitude (h0) | m | 0.01–0.03 |
| Soil profile unevenness step () | m | 0.70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pascuzzi, S.; Bulgakov, V.; Adamchuk, V.; Holovach, I.; Nadykto, V.; Budzanivskyi, M. Study of the Movement Dynamics of a Beet Leaves Harvester. Appl. Sci. 2023, 13, 841. https://doi.org/10.3390/app13020841
Pascuzzi S, Bulgakov V, Adamchuk V, Holovach I, Nadykto V, Budzanivskyi M. Study of the Movement Dynamics of a Beet Leaves Harvester. Applied Sciences. 2023; 13(2):841. https://doi.org/10.3390/app13020841
Chicago/Turabian StylePascuzzi, Simone, Volodymyr Bulgakov, Valerii Adamchuk, Ivan Holovach, Volodymyr Nadykto, and Myroslav Budzanivskyi. 2023. "Study of the Movement Dynamics of a Beet Leaves Harvester" Applied Sciences 13, no. 2: 841. https://doi.org/10.3390/app13020841