
Empirical Trials on Unmanned Agriculture in Open-Field Farming: Ridge Forming

 , , , , , , and
, , , , , , and
Abstract
:1. Introduction
2. Materials and Methods
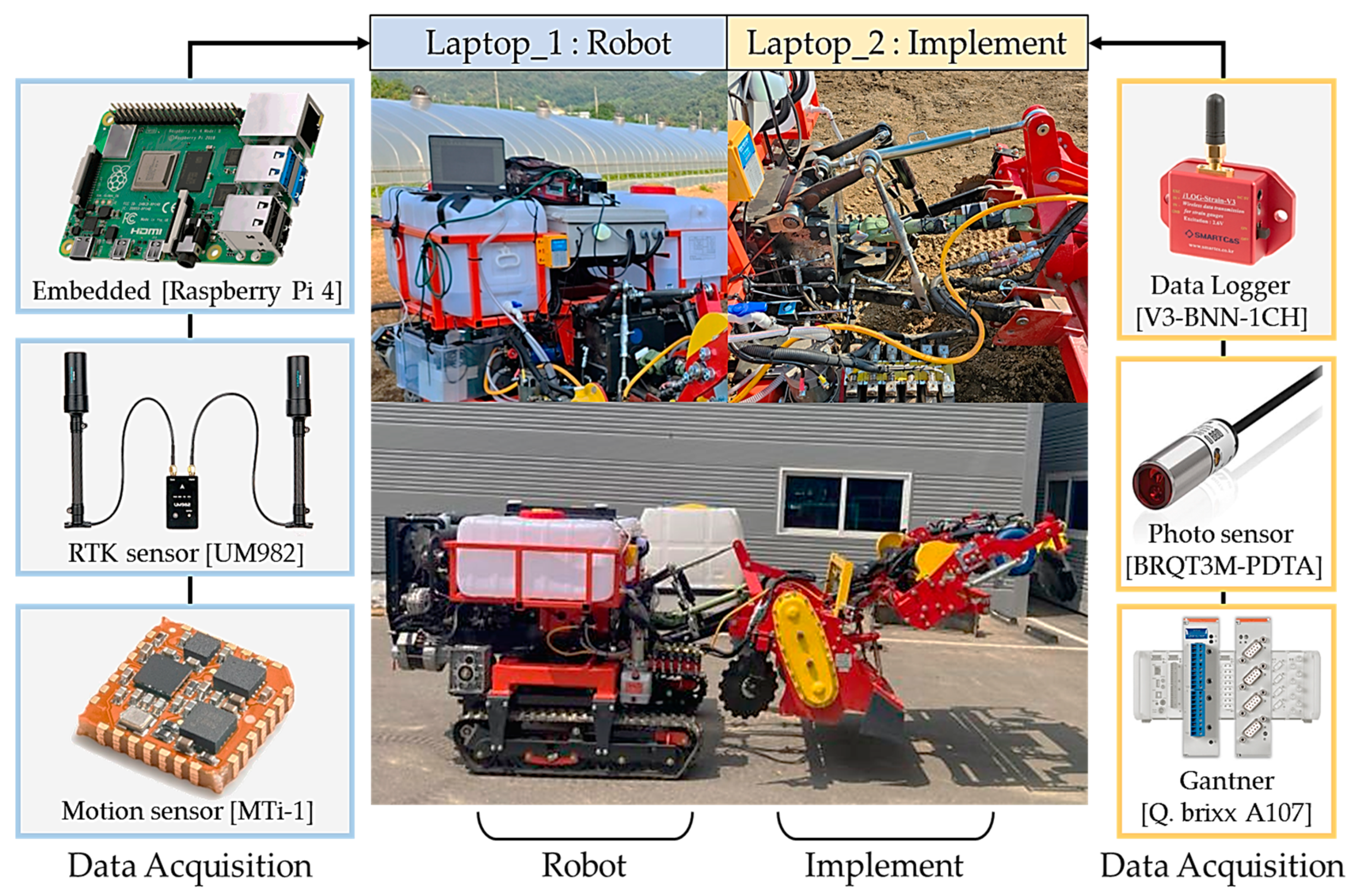
2.1. Robot Setup
2.2. Autonomous Driving Setup
2.3. Cost Analysis Framework
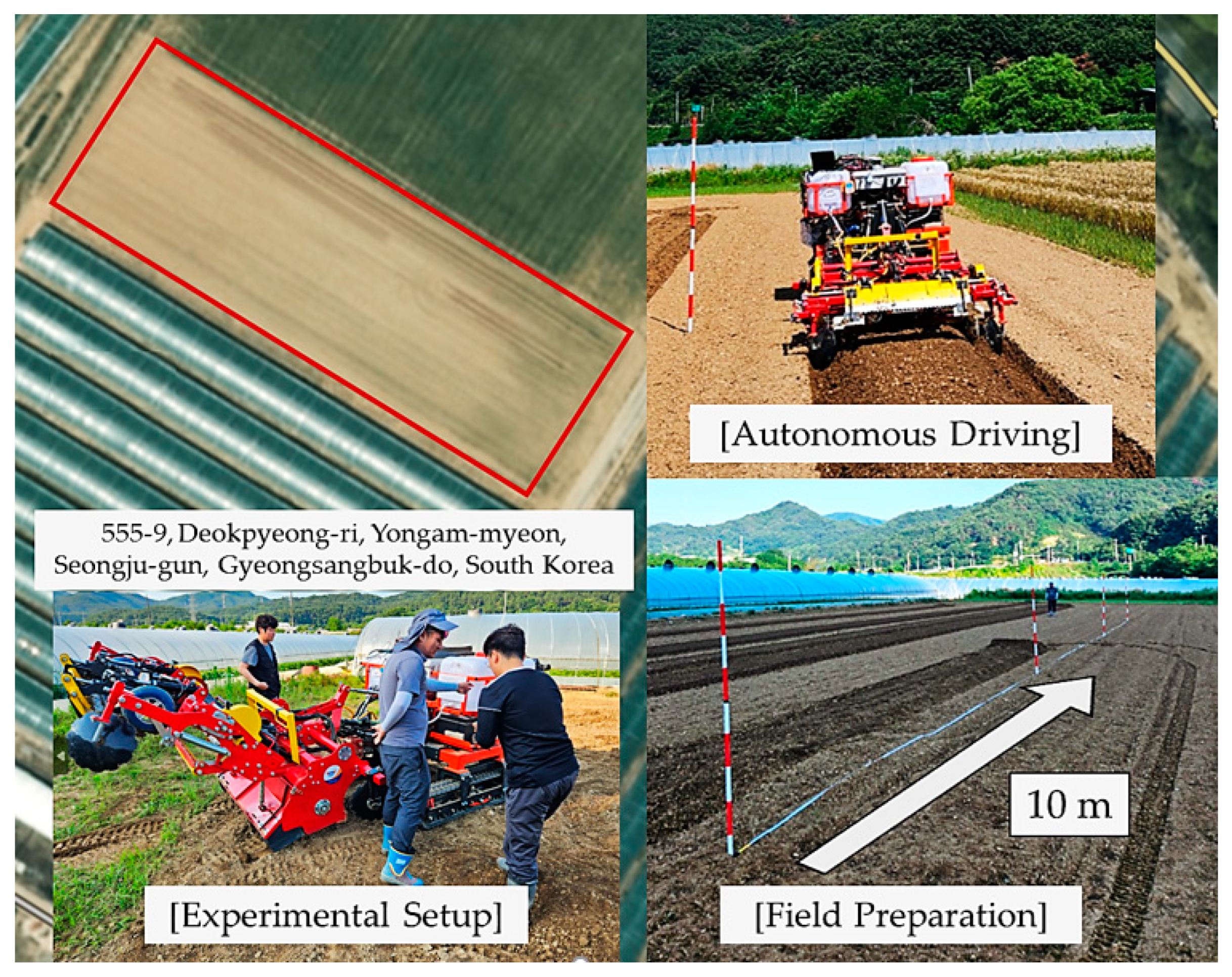
2.4. Field Test
3. Results and Discussion
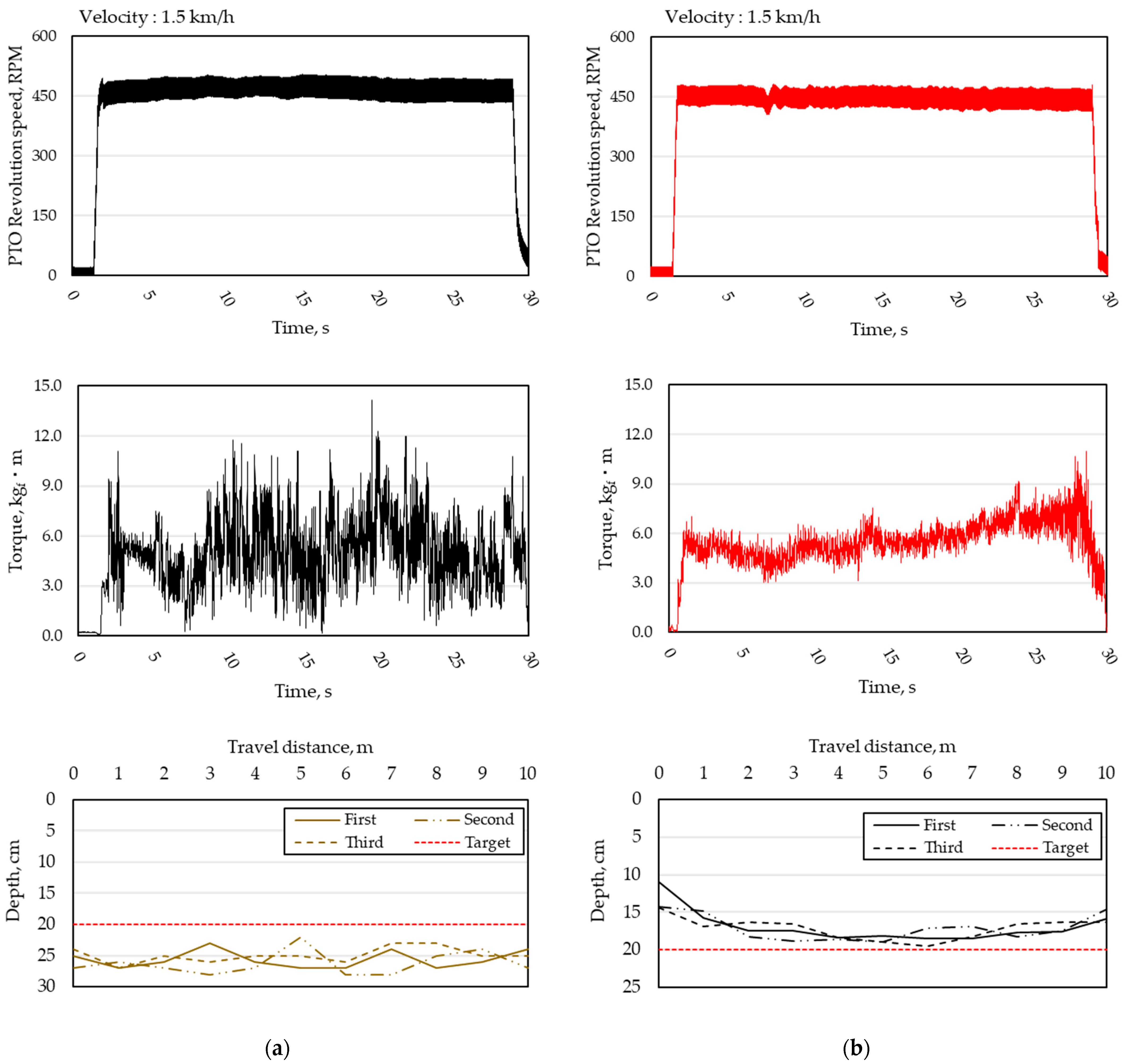
3.1. Operation Data Analysis
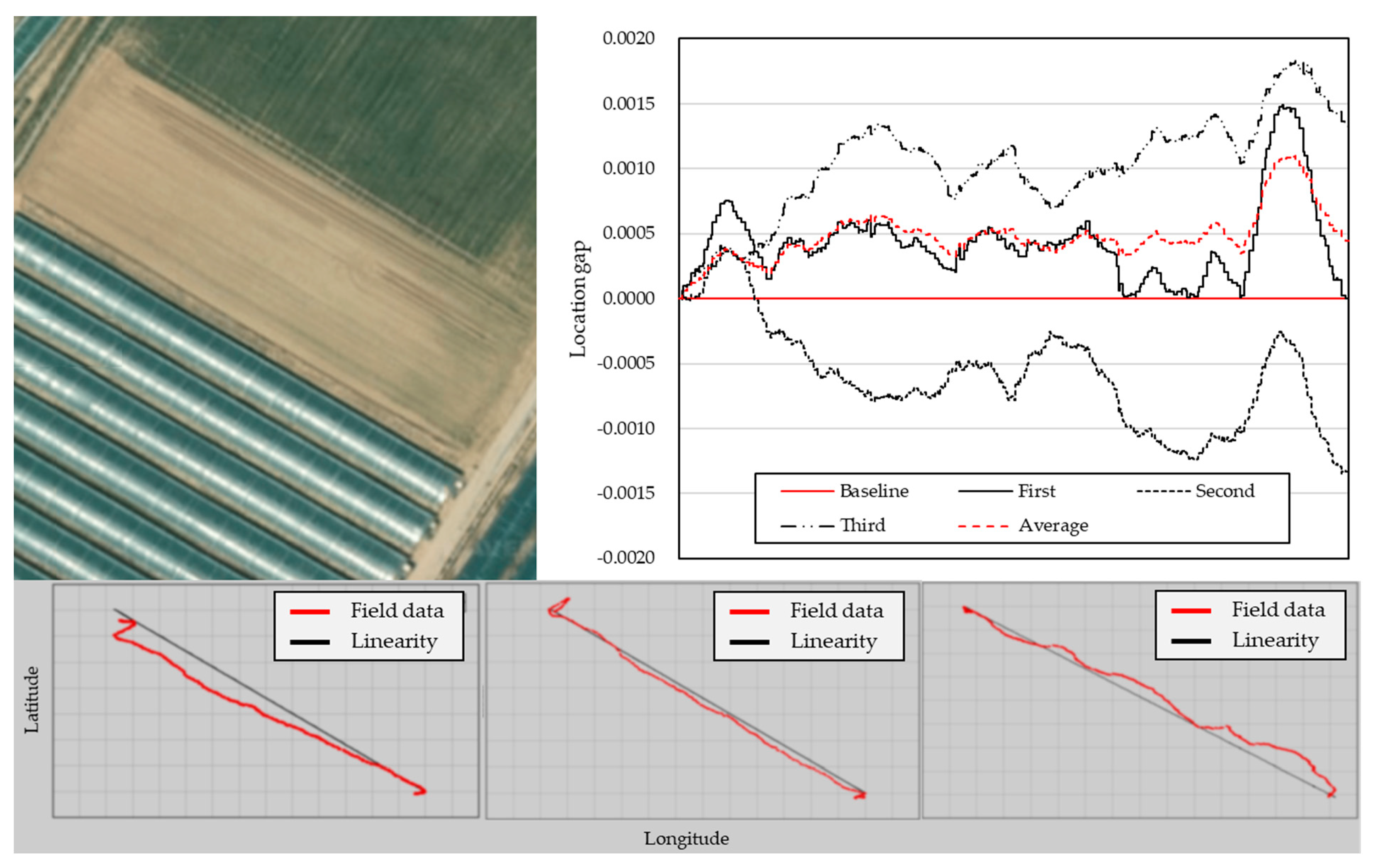
3.2. Linearity Performance
3.3. Cost Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lian, X.; Piao, S.; Chen, A.; Huntingford, C.; Fu, B.; Li, L.Z.X.; Huang, J.; Sheffield, J.; Berg, A.M.; Keeran, T.F.; et al. Multifaced characteristics of dryland aridity changes in a warming world. Nat. Rev. Earth Environ. 2021, 2, 232–250. [Google Scholar] [CrossRef]
- Son, J.; Kim, Y.; Kang, S.; Ha, Y. Enhancing safety through optimal placement of components in hydrogen tractor: Rollover angle analysis. Agriculture 2024, 14, 315. [Google Scholar] [CrossRef]
- Chugaievska, S.; Rusak, O. Labor migration of the rural population of Ukraine statistical aspect. Manag. Theory Stud. Rural Bus. Infrastruct. 2022, 44, 385–396. [Google Scholar] [CrossRef]
- Ma, L.; Liu, S.; Tao, T.; Gong, M.; Bai, J. Spatial reconstruction of rural settlements based on livability and population flow. Habitat Int. 2022, 126, 102614. [Google Scholar] [CrossRef]
- Choi, Y.B.; Kim, R.W.; Lee, I.B. Numerical analysis of snow distribution on greenhouse roofs using CFD-DEM coupling method. Biosyst. Eng. 2024, 237, 196–213. [Google Scholar] [CrossRef]
- Kiniorska, I.; Pytel, S. Ageing of rural populations in Eastern Poland. Environ. Socio-Econ. Stud. 2022, 10, 1–18. [Google Scholar] [CrossRef]
- Park, H.G.; Kang, S.H.; Kim, Y.G.; Nam, Y.J.; Kwon, S.G.; Kim, Y.S.; Uyeh, D.D.; Woo, S.M.; Ha, Y.S. Factual survey for garlic collecting task and musculoskeletal harmful factors analysis of task postures. J. Ergon. Soc. Korea 2022, 41, 449–465. [Google Scholar] [CrossRef]
- Yadav, R.; Verma, A.K.; Uppal, A.; Chahar, H.S.; Patel, J.; Pal, C.P. Prevalence of primary knee osteoarthritis in the urban and rural population in India. Indian J. Rheumatol. 2022, 17, 239–243. [Google Scholar]
- Yazd, S.D.; Wheeler, S.A.; Zuo, A. Key risk factors affecting farmers’ mental health: A systematic review. Int. J. Environ. Res. Public Health 2019, 16, 4849. [Google Scholar] [CrossRef]
- Xia, X.; Sun, H.; Yang, Z.; Yuan, W.; Ma, D. Decoupling analysis of rural population change and rural electricity consumption change in China. Int. J. Environ. Res. Public Health 2022, 19, 6676. [Google Scholar] [CrossRef]
- Kim, W.S. Data-driven agricultural innovation technology for digital agriculture. Appl. Sci. 2023, 13, 11163. [Google Scholar] [CrossRef]
- Phani, V.; Khan, M.R.; Dutta, T.K. Plant-parasitic nematodes as a potential threat to protected agriculture: Current status and management options. Crop Prot. 2021, 144, 105573. [Google Scholar] [CrossRef]
- Silva, R.S.; Kumar, L.; Shabani, F.; Picanco, M.C. Assessing the impact of global warming on worldwide open field tomato cultivation through CSIRO-Mk3.0 global climate model. J. Agric. Sci. 2017, 155, 407–420. [Google Scholar] [CrossRef]
- Kaur, A.; Sonawane, V.; Rosha, P. Energy efficiency optimization strategies for greenhouse-based crop cultivation: A review. Can. J. Chem. Eng. 2024, 102, 1051–1065. [Google Scholar] [CrossRef]
- Prakash, C.; Singh, L.P.; Gupta, A.; Lohan, S.K. Advancements in smart farming: A comprehensive review of IoT, wireless communication, sensors, and hardware for agricultural automation. Sens. Actuators A Phys. 2023, 362, 114605. [Google Scholar] [CrossRef]
- Adesina, O.S.; Whitfield, S.; Sallu, S.M.; Sait, S.M.; Pittchar, J. Bridging the gap in agricultural innovation research: A systematic review of push-pull biochontrol technology in sub-Saharan Africa. Int. J. Agric. Sustain. 2023, 21, 2232696. [Google Scholar] [CrossRef]
- Burchana, Y. Eco-innovation and agricultural sustainability: Empirical evidence from South Africa’s agricultural sector. Innov. Dev. 2023, 13, 1–20. [Google Scholar] [CrossRef]
- Jin, T.; Han, X. Robotic arms in precision agriculture: A comprehensive review of the technologies, applications, challenges, and future prospects. Comput. Electron. Agric. 2024, 221, 108938. [Google Scholar] [CrossRef]
- Aliloo, J.; Abbsai, E.; Karamidehkordi, E.; Parmehr, E.G. Dos and Don’ts of using drone technology in the crop fields. Technol. Soc. 2024, 76, 102456. [Google Scholar] [CrossRef]
- Liu, W.; Tian, S.; Wang, Q.; Jiang, H. Key technologies of plug tray seedling transplanters in protected agriculture: A review. Agriculture 2023, 13, 1488. [Google Scholar] [CrossRef]
- Xu, K.; Shu, L.; Xie, Q.; Song, M.; Zhu, Y.; Cao, W.; Ni, J. Precision weed detection in wheat fields for agriculture 4.0: A survey of enabling technologies, methods, and research challenges. Comput. Electron. Agric. 2023, 212, 108106. [Google Scholar] [CrossRef]
- Reyes, J.F.; Esquivel, W.; Cifuentes, D.; Ortega, R. Field testing of an automatic control system for variable rate fertilizer application. Comput. Electron. Agric. 2015, 113, 260–265. [Google Scholar] [CrossRef]
- Kim, J.; Son, H.I. A Voronoi diagram-based workspace partition for weak cooperation of multi-robot system in orchard. IEEE Access 2020, 8, 20676–20686. [Google Scholar] [CrossRef]
- Blender, T.; Buchner, T.; Fernandez, B.; Pichlmaier, B.; Schlegel, C. Managing a mobile agricultural robot swarm for a seedling task. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 6879–6886. [Google Scholar]
- Qin, J.; Sun, R.; Zhou, K.; Xu, Y.; Lin, B.; Yang, L.; Chen, Z.; Wen, L.; Wu, C. Lidar-based 3D obstacle detection using focal voxel R-CNN for farmland environment. Agronomy 2023, 13, 650. [Google Scholar] [CrossRef]
- Onishi, Y.; Yoshida, T.; Kurita, H.; Fukao, T.; Arihara, H.; Iwai, A. An automated fruit harvesting robot by using deep learning. Robomech J. 2019, 6, 13. [Google Scholar] [CrossRef]
- Bazargani, K.; Deemyad, T. Automation’s Impact on Agriculture: Opportunities, Challenges, and Economic Effects. Robotics 2024, 13, 13020033. [Google Scholar] [CrossRef]
- Gackstetter, D.; Bloh, M.V.; Hannus, V.; Meyer, S.T.; Weisser, W.; Luksch, C.; Asseng, S. Autonomous field management—An enabler of sustainable future in agriculture. Agric. Syst. 2023, 206, 103607. [Google Scholar] [CrossRef]
- Lehnert, C.; English, A.; McCool, C.; Tow, A.W.; Perez, T. Autonomous sweet pepper harvesting for protected cropping systems. IEEE Robot. Autom. Lett. 2017, 2, 872–879. [Google Scholar] [CrossRef]
- Thuilot, B.; Lenain, R.; Martinet, P.; Cariou, C. Accurate GPS-BASED guidance of agricultural vehicles operating on slippery ground. In Focus on Robotics and Intelligent Systems Research; Liu, J., Ed.; Nova Science Publisher: Hauppauge, NY, USA, 2006. [Google Scholar]
- Ju, C.; Kim, J.; Seol, J.; Son, H.I. A review on multirobot systems in agriculture. Comput. Electron. Agric. 2022, 202, 107336. [Google Scholar] [CrossRef]
- Lenain, R.; Thuilot, B.; Cariou, C.; Martinet, P. Adaptive and predictive path tracking control for off-road mobile robots. Eur. J. Control 2007, 4, 419–439. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Machine | Specification | Value | |
|---|---|---|---|
| Robot | Company | Sungboo Co., Ltd. (Chilgok-gun, Gyeongsangbuk-do, Republic of Korea) | |
| Model | SB-2000 | ||
| Frame | Dimension, mm (L × W × H) | 3977 × 1720 × 1460 | |
| Weight, kg | 1350 | ||
| Velocity, km/h | 1.5~3.0 | ||
| Type of brake | Electronic | ||
| Maximum distance of point search, mm | 2000 | ||
| Distance between identified point, mm | 200~1000 | ||
| Battery | Voltage, V | 12 | |
| Amplifier Hour, Ah | 63 | ||
| Quantity, ea | 4 | ||
| Track | Dimension, mm (L × W) | 1200 × 180 | |
| Implement | Company | Bulls Co., Ltd. (Seongju-gun, Gyeongsangbuk-do, Republic of Korea) | |
| Model | BG600 | ||
| Dimension (L × W × H) | 1400 × 1200 × 720 | ||
| Weight, kg | 350 | ||
| PTO revolution speed, RPM | 440~800 | ||
| Number of furrows, ea | 6 | ||
| Target structure of ridge | Width, mm | 1200 | |
| Depth, mm | 150~200 | ||
| Conventional Method | Developed Robot | ||
|---|---|---|---|
| Fixed cost (A) | 7413.33 | 7413.33 | |
| Depreciation | 1583.33 | 1583.33 | |
| Repair | 1200.00 | 1200.00 | |
| Interest | 4410.00 | 4410.00 | |
| Tax | - | - | |
| Insurance | 20.00 | 20.00 | |
| Housing | 200.00 | 200.00 | |
| Variable cost (B) | 10,228.75 | 8675.00 | |
| Annual operating time, h | 100 | 100 | |
| Fuel, L | 13.51 | - | |
| Lubrication | 2.03 | - | |
| Labor cost | 18.75 | 18.75 | |
| Usage cost per hour | 68.00 | 68.00 | |
| Sum of A and B | 17,642.08 | 16,088.33 | |
| Workable burden area, ha | 17.94 | 17.94 | |
| Annual usage cost, thousand KRW/ha | 983.39 | 896.78 | |
| Assistant employ cost | 781.24 | - | |
| Total, thousand KRW/ha | 1764.63 | 896.78 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, S.; Kim, Y.; Han, J.; Park, H.; Son, J.; Han, Y.; Woo, S.; Ha, Y. Empirical Trials on Unmanned Agriculture in Open-Field Farming: Ridge Forming. Appl. Sci. 2024, 14, 8155. https://doi.org/10.3390/app14188155
Kang S, Kim Y, Han J, Park H, Son J, Han Y, Woo S, Ha Y. Empirical Trials on Unmanned Agriculture in Open-Field Farming: Ridge Forming. Applied Sciences. 2024; 14(18):8155. https://doi.org/10.3390/app14188155
Chicago/Turabian StyleKang, Seokho, Yonggik Kim, Joonghee Han, Hyunggyu Park, Jinho Son, Yujin Han, Seungmin Woo, and Yushin Ha. 2024. "Empirical Trials on Unmanned Agriculture in Open-Field Farming: Ridge Forming" Applied Sciences 14, no. 18: 8155. https://doi.org/10.3390/app14188155