
Artificial Intelligence Model Used for Optimizing Abrasive Water Jet Machining Parameters to Minimize Delamination in Carbon Fiber-Reinforced Polymer

 , , , , and
, , , , and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Design of Experiments
2.2. Materials
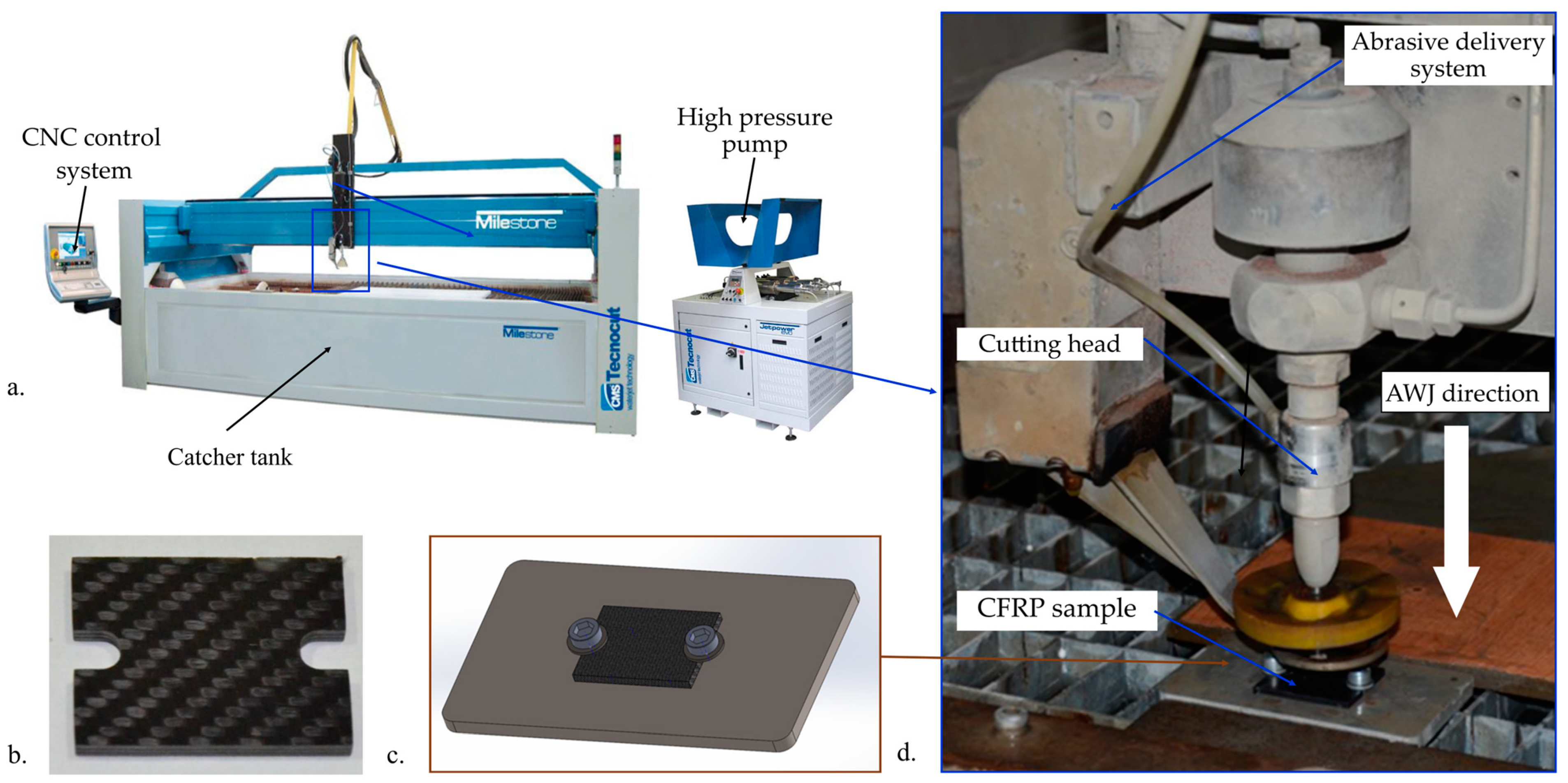
2.3. Experimental Procedure and Results
2.4. Artificial Neural Network (ANN) Model
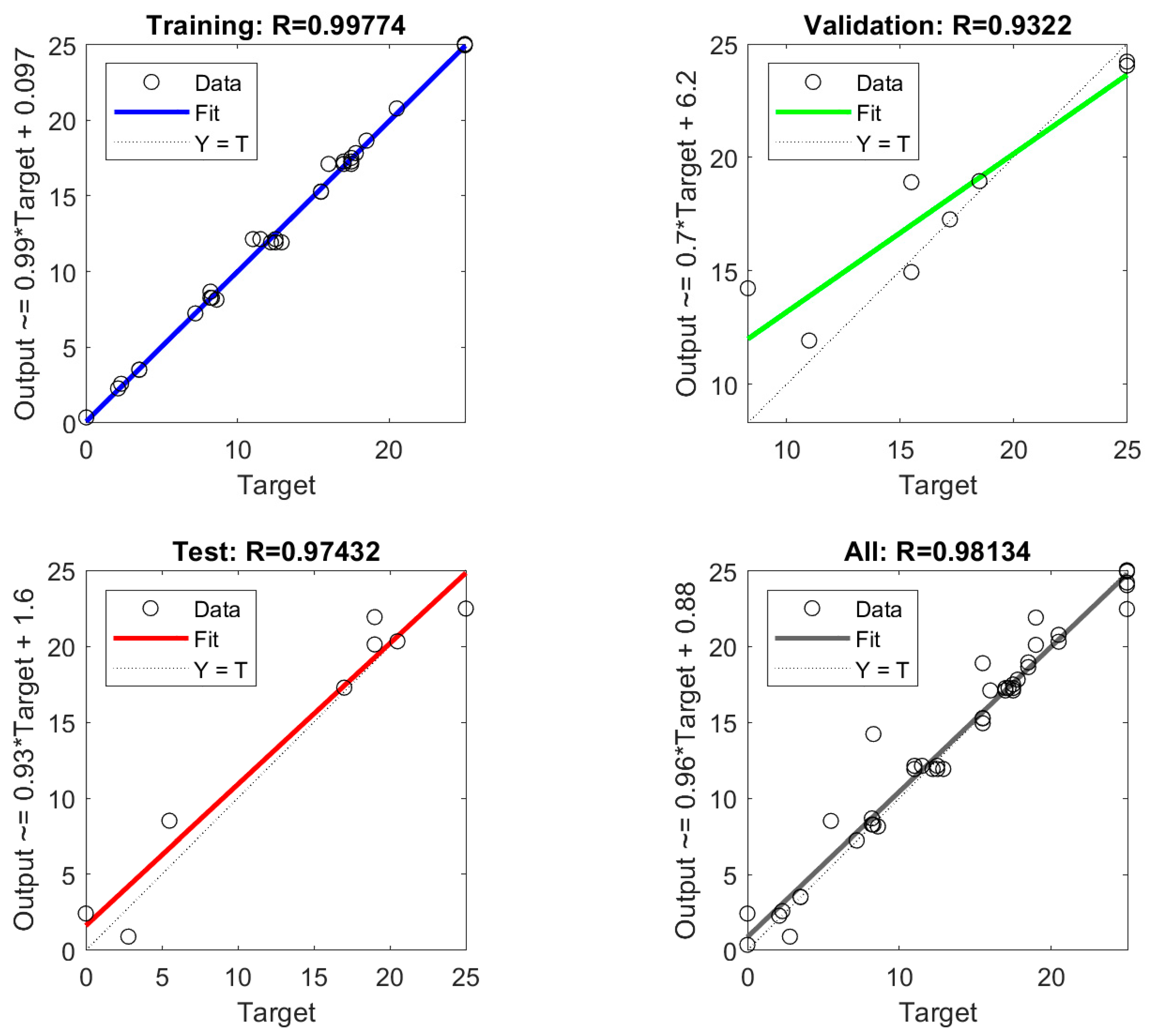
- Data input. The first step in the modeling process involves feeding the process parameters into the neural network. The dataset consists of predictors (input data) and responses (target data). A double array with 51 samples and 4 features representing the process parameters (water jet pressure P, standoff distance SOD, material thickness t, and abrasive start synchronization ASS) comprises the predictors. The response consists of a double array with 51 samples and 4 features representing the delamination extent (Dext). Each feature in the predictor array is represented as a neuron in the input layer of the network, which serves as the starting point for data processing. The data input (51 samples) was split, with 70% used for ANN model training, 15% for model validation, and 15% for model testing.
- Hidden layer processing. After the input data enter the network, they are processed by the hidden layer, which contains 10 neurons. These neurons use a sigmoid activation function to introduce non-linearity into the model. Each hidden neuron calculates a weighted sum of the input values, adding a bias term to this sum. The sigmoid function is then applied to this weighted sum, which helps the network learn complex patterns and relationships between the input parameters and the desired output.
- Output layer processing. The processed data from the hidden layer are then passed to the output layer. The neurons in the output layer use a linear activation function suitable for producing continuous output values. Each output neuron calculates a weighted sum of the outputs from the hidden layer neurons, including a bias term. The linear function is then applied to this weighted sum to produce the final output, which in this case is a prediction of delamination.
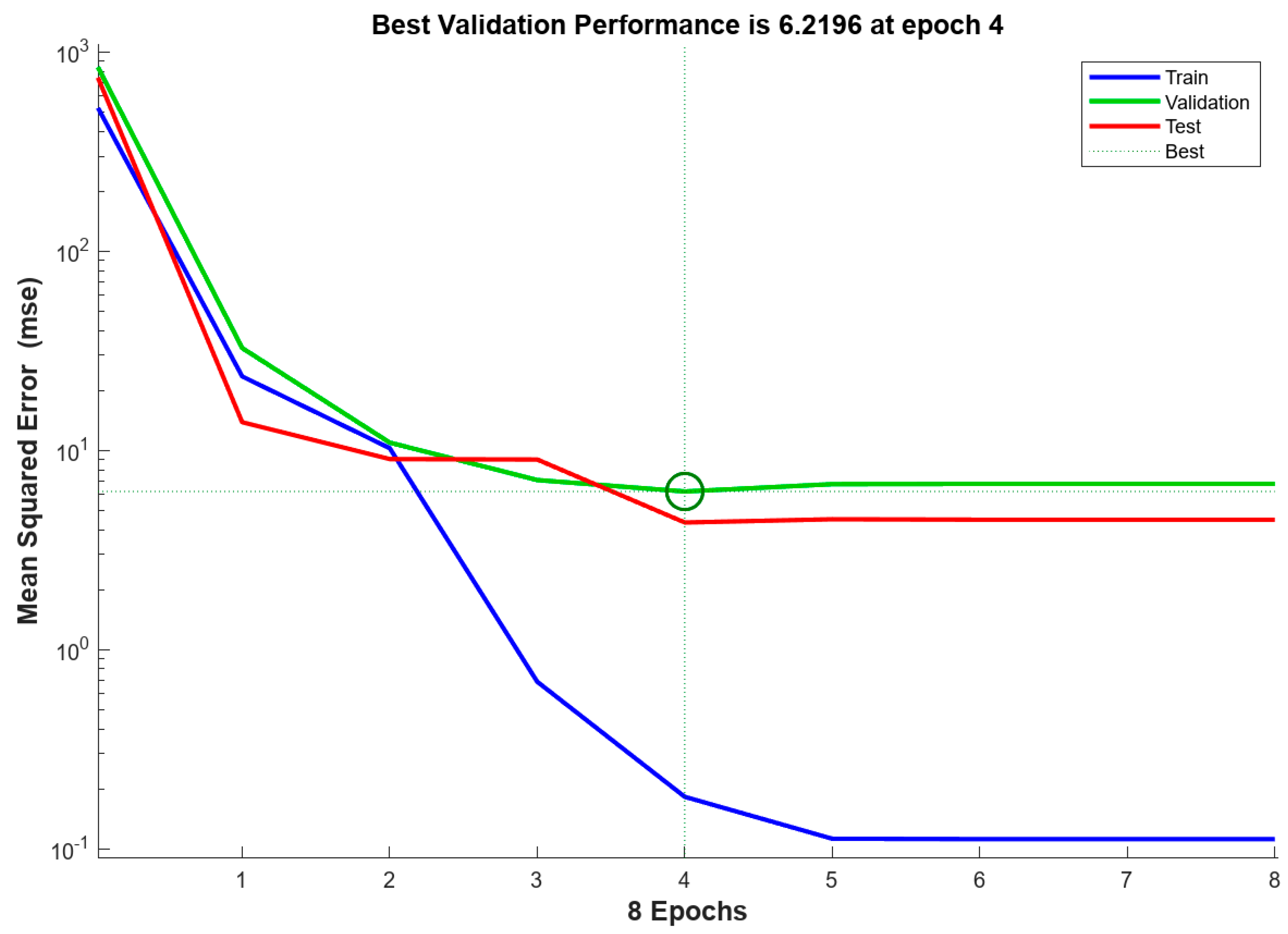
- Loss calculation. The network’s predicted output is compared with the actual measurements of delamination. The difference between these values is quantified using the mean squared error (MSE) loss function, which measures how well the network’s predictions match the real data. This loss value indicates the network’s performance and guides further adjustments.
- Backward propagation. To improve the network’s performance, backpropagation is used; this calculates how much each weight and bias contributes to the total error. The error at the output layer is determined by comparing the predicted and actual values. It is then used to calculate the error for each neuron in the hidden layer, considering how the output of each hidden neuron influences the final prediction.
- Parameter update. Using the errors calculated during backpropagation, the network updates its weights and biases to reduce the loss. This is accomplished using a technique called gradient descent, which adjusts each parameter slightly in the direction that will decrease the error. The learning rate determines the size of these adjustments. In this study, the Levenberg–Marquardt algorithm is used for training, which is known for its efficiency in handling non-linear least squares problems.
- Iteration. The entire process of forward propagation, loss calculation, backward propagation, and parameter update is repeated for many iterations, known as epochs. This iterative process continues until the network’s performance stabilizes and the loss converges to a minimum value, indicating that the network has been effectively trained.
3. Results and Discussions
3.1. Performance of the ANN Model in Predicting Delamination
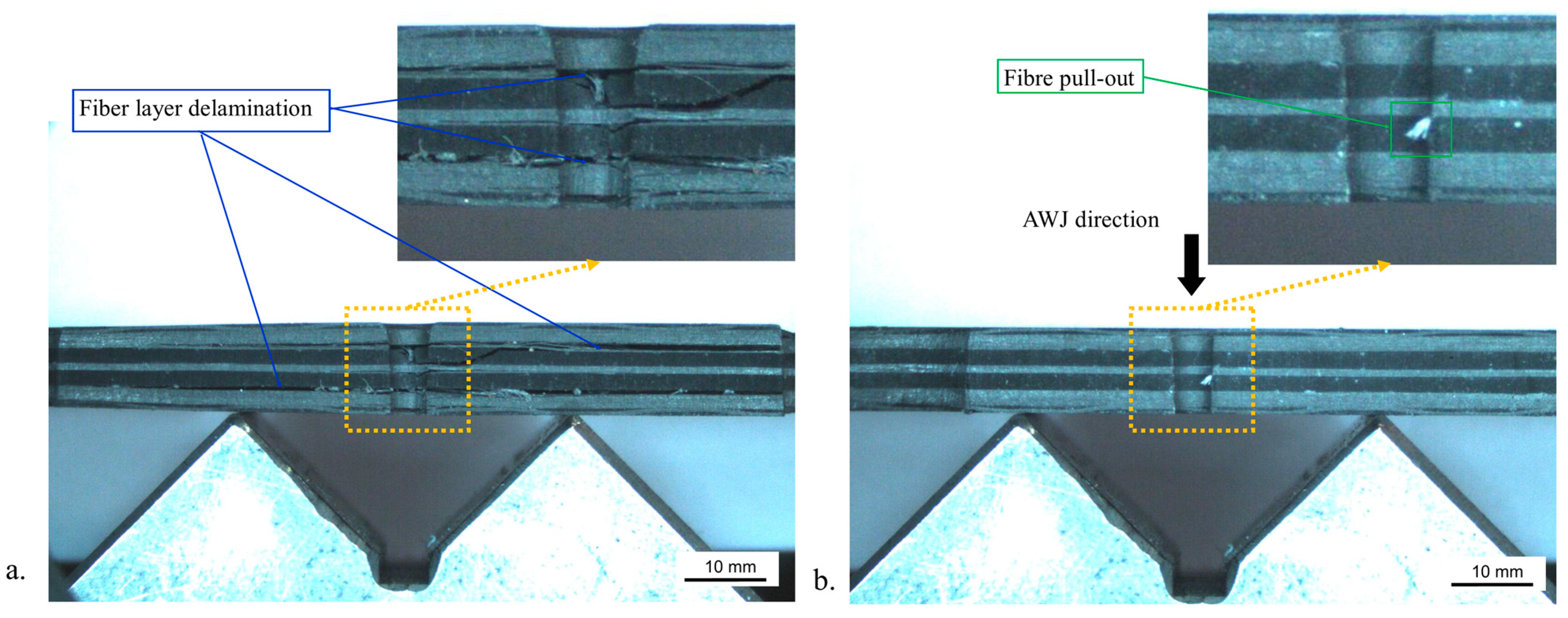
3.2. The Morphology of the Machined Surfaces Investigation
3.3. ANN Model Validation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
- function [y1] = myNeuralNetworkFunction(x1)
- %MYNEURALNETWORKFUNCTION neural network simulation function.
- % Auto-generated by MATLAB, 23-Jul-2024 13:01:05.
- % [y1] = myNeuralNetworkFunction(x1) takes these arguments:
- % x = Qx4 matrix, input #1
- % and returns:
- % y = Qx1 matrix, output #1
- % where Q is the number of samples.
- %#ok<*RPMT0>
- % ===== NEURAL NETWORK CONSTANTS =====
- % Input 1
- x1_step1.xoffset = [100;1;0;2];
- x1_step1.gain = [0.00666666666666667;0.222222222222222;2;0.666666666666667];
- x1_step1.ymin = −1;
- % Layer 1
- b1 = [3.0942814848929001137;−1.6412631940412265585;−1.7357019482919628928;0.0046341803092739136671;−0.12092182611574373019;0.0017721478219405242815;−0.73329001720699682476;0.89508232533568099498;1.871406632027108774;−2.2806622933958196064];
- IW1_1 = [−1.3180624629005928128 −1.3806326862996611826 0.80956172730409159399 0.24635899622397591791;1.1998835046210121202 −0.76280403929718321177 1.9324656114513456551 0.80216733375313908905;0.40939565241548864227 −2.3991523673818146989 −0.97839919126131558169 −0.29980263631366899091;3.0237925270406353917 −0.1146067506786898893 0.38968148073836933465 −0.25453631251896452481;0.85283782903481264448 −0.47911720974742144641 −1.2273801839673017522 2.1822395897464237358;−0.44452333762914120197 0.046225899173519845176 0.31531716693307315635 −2.6451698302159476484;−2.082201349833978643 −0.76346898345159097676 0.80987596832556574267 −0.26354987734844792513;0.23328632180445929567 1.9398593712767222552 −2.1170295819115390046 −0.95572595759438017105;1.2950325142995149363 −0.40655955776770902332 −1.3348898800375803564 1.9412701409376558193;0.2620678477346494728 1.4222211061809311161 −1.0819256332215649863 −1.8734496430651590426];
- % Layer 2
- b2 = 0.037914970571524556076;
- LW2_1 = [−0.3338122113448129813 −0.062787018149683293533 −0.023067778401084607087 0.30886252071691638887 0.11947332736834551103 0.25517375503750572285 −0.46461748677279546271 0.073666775477091439583 0.15553036075489234946 −0.23597420977667460384];
- % Output 1
- y1_step1.ymin = −1;
- y1_step1.gain = 0.08;
- y1_step1.xoffset = 0;
- % ===== SIMULATION ========
- % Dimensions
- Q = size(x1,1); % samples
- % Input 1
- x1 = x1’;
- xp1 = mapminmax_apply(x1,x1_step1);
- % Layer 1
- a1 = tansig_apply(repmat(b1,1,Q) + IW1_1*xp1);
- % Layer 2
- a2 = repmat(b2,1,Q) + LW2_1*a1;
- % Output 1
- y1 = mapminmax_reverse(a2,y1_step1);
- y1 = y1’;
- end
- % ===== MODULE FUNCTIONS ========
- % Map Minimum and Maximum Input Processing Function
- function y = mapminmax_apply(x,settings)
- y = bsxfun(@minus,x,settings.xoffset);
- y = bsxfun(@times,y,settings.gain);
- y = bsxfun(@plus,y,settings.ymin);
- end
- % Sigmoid Symmetric Transfer Function
- function a = tansig_apply(n,~)
- a = 2 ./(1 + exp(−2*n)) − 1;
- end
- % Map Minimum and Maximum Output Reverse-Processing Function
- function x = mapminmax_reverse(y,settings)
- x = bsxfun(@minus,y,settings.ymin);
- x = bsxfun(@rdivide,x,settings.gain);
- x = bsxfun(@plus,x,settings.xoffset);
- end
References
- Geier, N.; Xu, J.; Poór, D.I.; Dege, J.H.; Davim, J.P. A review on advanced cutting tools and technologies for edge trimming of carbon fibre reinforced polymer (CFRP) composites. Compos. Part B Eng. 2023, 266, 111037. [Google Scholar] [CrossRef]
- Aamir, M.; Tolouei-Rad, M.; Giasin, K.; Nosrati, A. Recent advances in drilling of carbon fiber–reinforced polymers for aerospace applications: A review. Int. J. Adv. Manuf. Technol. 2019, 105, 2289–2308. [Google Scholar] [CrossRef]
- Miron, A.; Balc, N.; Popan, A.; Cristina, B.; Paul, B. Studies on Water Jet Cutting of 2D Parts Made from Carbon Fiber Composite Materials. Acad. J. Manuf. Eng. 2013, 11, 87. [Google Scholar]
- Bere, P.; Popescu, A.; Dudescu, C.; Hancu, L. Influence of the stacking sequence on the mechanical proprieties of glass fiber reinforced polymer. MATEC Web Conf. 2017, 112, 04006. [Google Scholar] [CrossRef]
- Vasile Adrian, C.; Paul, B.; Marian, B.; Sorin, G.; Cristina, B. Development of Environmental Technology for Carbon Fibre Reinforced Materials Recycling. Mater. Plast. 2013, 50, 79–83. [Google Scholar]
- Birleanu, C.; Pustan, M.; Pop, G.; Cioaza, M.; Popa, F.; Lazarescu, L.; Contiu, G. Experimental Investigation of the Tribological Behaviors of Carbon Fiber Reinforced Polymer Composites under Boundary Lubrication. Polymers 2022, 14, 3716. [Google Scholar] [CrossRef]
- Ding, J.; Cheng, L.; Chen, X.; Chen, C.; Liu, K. A review on ultra-high cycle fatigue of CFRP. Compos. Struct. 2021, 256, 113058. [Google Scholar] [CrossRef]
- Bere, P.; Neamtu, C.; Udroiu, R. Novel Method for the Manufacture of Complex CFRP Parts Using FDM-based Molds. Polymers 2020, 12, 2220. [Google Scholar] [CrossRef] [PubMed]
- Golewski, P.; Sadowski, T.; Kneć, M.; Budka, M. The effect of thermal aging degradation of CFRP composite on its mechanical properties using destructive and non-destructive methods and the DIC system. Polym. Test. 2023, 118, 107902. [Google Scholar] [CrossRef]
- Qin, G.; Zheng, L.; Mi, P.; Zhu, Y.; Li, M.; Na, J.; Wang, Y. Influence of single or multi-factor coupling of temperature, humidity and load on the aging failure of adhesively bonded CFRP / aluminum alloy composite joints for automobile applications. Int. J. Adhes. Adhes. 2023, 123, 103345. [Google Scholar] [CrossRef]
- Mohamed, H. Trimming of CFRP aircraft components. In Proceedings of the WJTA-IMCA Conference and Expo, Houston, TX, USA, 9–11 September 2013. [Google Scholar]
- Popan, I.A.; Bocanet, V.; Balc, N.; Popan, A.I. Investigation on Feed Rate Influence on Surface Quality in Abrasive Water Jet Cutting of Composite Materials, Monitoring Acoustic Emissions. In Advances in Manufacturing Engineering and Materials; Hloch, S., Klichová, D., Krolczyk, G.M., Chattopadhyaya, S., Ruppenthalová, L., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 105–113. ISBN 978-3-319-99352-2. [Google Scholar]
- Sabău, E.; Udroiu, R.; Bere, P.; Buranský, I.; Miron-Borzan, C.-Ş. A Novel Polymer Concrete Composite with GFRP Waste: Applications, Morphology, and Porosity Characterization. Appl. Sci. 2020, 10, 2060. [Google Scholar] [CrossRef]
- Shanmugam, D.K.; Nguyen, T.; Wang, J. A study of delamination on graphite/epoxy composites in abrasive waterjet machining. Compos. Part A Appl. Sci. Manuf. 2008, 39, 923–929. [Google Scholar] [CrossRef]
- Popan, I.A.; Cosma, C.; Popan, A.I.; Bocăneț, V.I.; Bâlc, N. Monitoring Equipment Malfunctions in Composite Material Machining: Acoustic Emission-Based Approach for Abrasive Waterjet Cutting. Appl. Sci. 2024, 14, 4901. [Google Scholar] [CrossRef]
- Hloch, S.; Svobodová, J.; Srivastava, A.K.; Srivastava, M.; Poloprudský, J.; Nag, A. Submerged pulsating water jet erosion of ductile material. Wear 2024, 538–539, 205243. [Google Scholar] [CrossRef]
- Popan, I.A.; Balc, N.; Popan, A.I. Avoiding carbon fibre reinforced polymer delamination during abrasive water jet piercing: A new piercing method. Int. J. Adv. Manuf. Technol. 2022, 119, 1139–1152. [Google Scholar] [CrossRef]
- Stolárik, G.; Klichová, D.; Poloprudský, J.; Chlupová, A.; Nag, A.; Hloch, S. Submerged surface texturing of AISI 304L using the pulsating water jet method. Arch. Civ. Mech. Eng. 2024, 24, 207. [Google Scholar] [CrossRef]
- Popan, A.; Cosma, C.; Popan, A.I.; Trif, A.; Nicolae, P. Abrasive Water Jet Piercing Simulation of Carbon Fibre Reinforced Polymer. Acta Tech. Napoc. Ser. Appl. Math. Mech. Eng. 2023, II, 209–214. [Google Scholar]
- Kong, M.C.; Anwar, S.; Billingham, J.; Axinte, D.A. Mathematical modelling of abrasive waterjet footprints for arbitrarily moving jets: Part I—Single straight paths. Int. J. Mach. Tools Manuf. 2012, 53, 58–68. [Google Scholar] [CrossRef]
- Basarman, A.-P.; Lobonțiu, M. Kerf variation analysing for abrasive water jet cutting of a steel square part. MATEC Web Conf. 2017, 112, 03002. [Google Scholar] [CrossRef]
- Filip, A.C.; Mihail, L.A.; Vasiloni, M.A. An experimental study on the dimensional accuracy of holes made by abrasive waterjet machining of Hardox steels. MATEC Web Conf. 2017, 137, 02003. [Google Scholar] [CrossRef]
- Ozcan, Y.; Tunc, L.T.; Kopacka, J.; Cetin, B.; Sulitka, M. Modelling and simulation of controlled depth abrasive water jet machining (AWJM) for roughing passes of free-form surfaces. Int. J. Adv. Manuf. Technol. 2021, 114, 3581–3596. [Google Scholar] [CrossRef]
- Chen, M.; Zhang, S.; Zeng, J.; Chen, B. Correcting shape error located in cut-in/cut-out region in abrasive water jet cutting process. Int. J. Adv. Manuf. Technol. 2019, 102, 1165–1178. [Google Scholar] [CrossRef]
- Zou, X.; Fu, L.; Wu, L.; Zuo, W. Research on Multiphase Flow and Nozzle Wear in a High-Pressure Abrasive Water Jet Cutting Head. Machines 2023, 11, 614. [Google Scholar] [CrossRef]
- Bañon, F.; Sambruno, A.; Batista, M.; Simonet, B.; Salguero, J. Study of the surface quality of carbon fiber–reinforced thermoplastic matrix composite (CFRTP) machined by abrasive water jet (AWJM). Int. J. Adv. Manuf. Technol. 2020, 107, 3299–3313. [Google Scholar] [CrossRef]
- Perec, A. Experimental research into alternative abrasive material for the abrasive water-jet cutting of titanium. Int. J. Adv. Manuf. Technol. 2018, 97, 1529–1540. [Google Scholar] [CrossRef]
- Alexandru, P.I. Modeling and Optimization of the Abrasive Water Jet Cutting Process. In Modeling and Optimization in Manufacturing, 1st ed.; Pruncu, C.I., Jiang, J., Eds.; Wiley: Hoboken, NJ, USA, 2021; pp. 113–131. ISBN 978-3-527-34694-3. [Google Scholar]
- Nasulea, D.; Filip, A.C.; Zisu, S.; Oancea, G. Research Regarding the Dimensional Precision of Electrical Steel Strips Machined by Waterjet Cutting in Multilayer Packages. Processes 2023, 11, 2788. [Google Scholar] [CrossRef]
- Natarajan, Y.; Murugesan, P.K.; Mohan, M.; Liyakath Ali Khan, S.A. Abrasive Water Jet Machining process: A state of art of review. J. Manuf. Process. 2020, 49, 271–322. [Google Scholar] [CrossRef]
- Dhanawade, A.; Kumar, S. Experimental study of delamination and kerf geometry of carbon epoxy composite machined by abrasive water jet. J. Compos. Mater. 2017, 51, 3373–3390. [Google Scholar] [CrossRef]
- Kim, G.; Denos, B.R.; Sterkenburg, R. Influence of different piercing methods of abrasive waterjet on delamination of fiber reinforced composite laminate. Compos. Struct. 2020, 240, 112065. [Google Scholar] [CrossRef]
- Hlaváč, L.M. Revised Model of Abrasive Water Jet Cutting for Industrial Use. Materials 2021, 14, 4032. [Google Scholar] [CrossRef] [PubMed]
- Caggiano, A.; Nele, L. Artificial Neural Networks for Tool Wear Prediction Based on Sensor Fusion Monitoring of CFRP/CFRP Stack Drilling. IJAT 2018, 12, 275–281. [Google Scholar] [CrossRef]
- Rakic, S.; Softic, S.; Vilkas, M.; Lalic, B.; Marjanovic, U. Key Indicators for Student Performance at the E-Learning Platform: An SNA Approach. In Proceedings of the 2018 16th International Conference on Emerging eLearning Technologies and Applications (ICETA), Stary Smokovec, Slovakia, 15–16 November 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 463–468. [Google Scholar]
- Mitić, J.; Vitković, N.; Trajanović, M.; Górski, F.; Păcurar, A.; Borzan, C.; Sabău, E.; Păcurar, R. Utilizing Artificial Neural Networks for Geometric Bone Model Reconstruction in Mandibular Prognathism Patients. Mathematics 2024, 12, 1577. [Google Scholar] [CrossRef]
- Grozav, S.D.; Sterca, A.D.; Kočiško, M.; Pollák, M.; Ceclan, V. Feasibility of Predictive Models for the Quality of Additive Manufactured Components Based on Artificial Neural Networks. Machines 2022, 10, 128. [Google Scholar] [CrossRef]
- Ficko, M.; Begic-Hajdarevic, D.; Cohodar Husic, M.; Berus, L.; Cekic, A.; Klancnik, S. Prediction of Surface Roughness of an Abrasive Water Jet Cut Using an Artificial Neural Network. Materials 2021, 14, 3108. [Google Scholar] [CrossRef]
- Aydin, G.; Karakurt, I.; Hamzacebi, C. Artificial neural network and regression models for performance prediction of abrasive waterjet in rock cutting. Int. J. Adv. Manuf. Technol. 2014, 75, 1321–1330. [Google Scholar] [CrossRef]
- Teti, R.; Mourtzis, D.; D’Addona, D.M.; Caggiano, A. Process monitoring of machining. CIRP Ann. 2022, 71, 529–552. [Google Scholar] [CrossRef]
- Bilal, D.K.; Unel, M.; Tunc, L.T. Improving Vision Based Pose Estimation Using LSTM Neural Networks. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 483–488. [Google Scholar]
- Basulo Ribeiro, J.; Amorim, M. How To Accelerate Digital Transformation in Companies With Lean Philosophy? Contributions Based on a Practical Case. Int. J. Ind. Eng. Manag. 2023, 14, 94–104. [Google Scholar] [CrossRef]
- Cardoso, M.; Ares, E.; Ferreira, L.P.; Pelaez, G. Using Index Function and Artificial Intelligence to assess Sustainability: A Bibliometric analysis. Int. J. Ind. Eng. Manag. 2023, 14, 311–325. [Google Scholar] [CrossRef]
- Mattera, G.; Polden, J.; Caggiano, A.; Nele, L.; Pan, Z.; Norrish, J. Semi-supervised learning for real-time anomaly detection in pulsed transfer wire arc additive manufacturing. J. Manuf. Process. 2024, 128, 84–97. [Google Scholar] [CrossRef]
- Zain, A.M.; Haron, H.; Sharif, S. Estimation of the minimum machining performance in the abrasive waterjet machining using integrated ANN-SA. Expert Syst. Appl. 2011, 38, 8316–8326. [Google Scholar] [CrossRef]
- Grozav, S.D.; Sterca, A.D.; Kočiško, M.; Pollák, M.; Ceclan, V. Artificial Neural Network-Based Predictive Model for Finite Element Analysis of Additive-Manufactured Components. Machines 2023, 11, 547. [Google Scholar] [CrossRef]
- Biruk-Urban, K.; Zagórski, I.; Kulisz, M.; Leleń, M. Analysis of Vibration, Deflection Angle and Surface Roughness in Water-Jet Cutting of AZ91D Magnesium Alloy and Simulation of Selected Surface Roughness Parameters Using ANN. Materials 2023, 16, 3384. [Google Scholar] [CrossRef] [PubMed]
- Prabhu, R.; Kanthababu, M. Prediction of surface roughness and depth of cut in abrasive waterjet milling of alumina ceramic using Machine learning algorithms. Expert Syst. Appl. 2024, 246, 123168. [Google Scholar] [CrossRef]
- Gupta, T.V.K.; Ramkumar, J.; Tandon, P.; Vyas, N.S. Application of Artificial Neural Networks in Abrasive Water Jet Milling. Procedia CIRP 2015, 37, 225–229. [Google Scholar] [CrossRef]
- ECOTECH—CFRP Manufacturer. 2024. Available online: https://www.r-g.de (accessed on 1 July 2024).
- Tecnocut Milestone 1740—Equipment Specifications. 2024. Available online: www.scmgroup.com (accessed on 1 July 2024).
- Kayabasi, E.; Ozturk, S.; Celik, E.; Kurt, H. Determination of cutting parameters for silicon wafer with a Diamond Wire Saw using an artificial neural network. Sol. Energy 2017, 149, 285–293. [Google Scholar] [CrossRef]
- Djurović, S.; Lazarević, D.; Ćirković, B.; Mišić, M.; Ivković, M.; Stojčetović, B.; Petković, M.; Ašonja, A. Modeling and Prediction of Surface Roughness in Hybrid Manufacturing–Milling after FDM Using Artificial Neural Networks. Appl. Sci. 2024, 14, 5980. [Google Scholar] [CrossRef]
- Bedelean, B.; Ispas, M.; Răcășan, S. Applying the Artificial Neural Network and Response Surface Methodology to Optimize the Drilling Process of Plywood. Appl. Sci. 2023, 13, 11343. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Water jet pressure (P) | 100, 143.93, 250, 356.07, 400 MPa |
| Standoff distance (SOD) | 1, 2.32, 5.5, 8.68, 10 mm |
| Material thickness (t) | 2, 5 mm |
| Abrasive start synchronization (ASS) | On/Off |
| Abrasive mass flow (ma) | 0.45 kg/min |
| Abrasive size | 80 mesh |
| Focusing tube diameter | 0.76 mm |
| Orifice diameter | 0.35 mm |
| Parameters | Value |
|---|---|
| Cutting head | Carat 3.0 Gardella |
| Abrasive inlet angle | Ψ = 40 deg. |
| Orifice | Diamond, do = 0.35 mm |
| Focusing tube | Ceratizit WJNS (df = 0.76 mm/lf = 101.6 mm) |
| Run | P | SOD | ASS | t | Dext | Run | P | SOD | ASS | t | Dext |
|---|---|---|---|---|---|---|---|---|---|---|---|
| MPa | mm | On/Off | mm | mm | MPa | mm | On/Off | mm | mm | ||
| 1 | 250 | 5.5 | Off | 2 | 17.5 | 26 | 356.07 | 2.32 | Off | 2 | 25 |
| 2 | 250 | 5.5 | On | 2 | 12.5 | 27 | 250 | 5.5 | On | 2 | 12.5 |
| 3 | 250 | 5.5 | Off | 5 | 17.5 | 28 | 250 | 10 | Off | 5 | 17.8 |
| 4 | 143.93 | 2.32 | Off | 5 | 8.6 | 29 | 250 | 5.5 | Off | 2 | 16.1 |
| 5 | 250 | 1 | Off | 5 | 15.5 | 30 | 250 | 5.5 | On | 5 | 11.2 |
| 6 | 143.93 | 8.68 | Off | 5 | 8.3 | 31 | 356.07 | 8.68 | On | 5 | 20.5 |
| 7 | 356.07 | 8.68 | Off | 5 | 25 | 32 | 356.07 | 8.68 | On | 2 | 20.5 |
| 8 | 100 | 5.5 | On | 2 | 0 | 33 | 250 | 10 | On | 2 | 15.5 |
| 9 | 250 | 1 | On | 5 | 8.2 | 34 | 356.07 | 8.68 | Off | 2 | 25.2 |
| 10 | 356.07 | 2.32 | Off | 5 | 25 | 35 | 100 | 5.5 | Off | 5 | 5.5 |
| 11 | 250 | 5.5 | Off | 2 | 17.5 | 36 | 143.93 | 2.32 | On | 5 | 2.8 |
| 12 | 250 | 5.5 | Off | 2 | 17.5 | 37 | 250 | 5.5 | On | 5 | 12.5 |
| 13 | 356.07 | 2.32 | On | 2 | 18.5 | 38 | 100 | 5.5 | On | 5 | 0 |
| 14 | 143.93 | 8.68 | On | 5 | 2.3 | 39 | 250 | 10 | On | 5 | 15.5 |
| 15 | 400 | 5.5 | Off | 5 | 25 | 40 | 250 | 5.5 | On | 2 | 11 |
| 16 | 250 | 5.5 | Off | 5 | 17.5 | 41 | 400 | 5.5 | On | 5 | 19 |
| 17 | 250 | 1 | On | 2 | 8.2 | 42 | 250 | 5.5 | On | 5 | 12.5 |
| 18 | 143.93 | 2.32 | On | 2 | 2.1 | 43 | 250 | 5.5 | Off | 5 | 17.1 |
| 19 | 250 | 5.5 | Off | 5 | 17.2 | 44 | 250 | 5.5 | On | 2 | 11.5 |
| 20 | 250 | 1 | Off | 2 | 15.5 | 45 | 250 | 5.5 | Off | 5 | 17.1 |
| 21 | 250 | 10 | Off | 2 | 17.5 | 46 | 250 | 5.5 | On | 5 | 12.2 |
| 22 | 400 | 5.5 | On | 2 | 19 | 47 | 143.93 | 8.68 | Off | 2 | 8.3 |
| 23 | 250 | 5.5 | Off | 2 | 17.1 | 48 | 143.93 | 2.32 | Off | 2 | 7.2 |
| 24 | 400 | 5.5 | Off | 2 | 25 | 49 | 100 | 5.5 | Off | 2 | 3.5 |
| 25 | 250 | 5.5 | On | 2 | 12.5 | 50 | 143.93 | 8.68 | On | 2 | 3.5 |
| Run | P | SOD | ASS | t | Predicted Dext | Measured Dext |
|---|---|---|---|---|---|---|
| MPa | mm | On/Off | mm | mm | mm | |
| 1 | 350 | 8 | Off | 2 | 24.1 | 25 |
| 2 | 100 | 8 | Off | 2 | 3.6 | 8 |
| 3 | 350 | 8 | On | 2 | 21 | 17.8 |
| 4 | 100 | 8 | On | 2 | 1.9 | 0 |
| 5 | 350 | 1 | Off | 5 | 21.9 | 18 |
| 6 | 100 | 1 | Off | 5 | 4.1 | 0 |
| 7 | 350 | 5 | Off | 5 | 23 | 25 |
| 8 | 100 | 5 | Off | 5 | 8.1 | 11.5 |
| 9 | 350 | 0.5 | On | 5 | 17.5 | 15.5 |
| 10 | 100 | 0.5 | On | 5 | 0.38 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Popan, I.A.; Bocăneț, V.I.; Softic, S.; Popan, A.I.; Panc, N.; Balc, N. Artificial Intelligence Model Used for Optimizing Abrasive Water Jet Machining Parameters to Minimize Delamination in Carbon Fiber-Reinforced Polymer. Appl. Sci. 2024, 14, 8512. https://doi.org/10.3390/app14188512
Popan IA, Bocăneț VI, Softic S, Popan AI, Panc N, Balc N. Artificial Intelligence Model Used for Optimizing Abrasive Water Jet Machining Parameters to Minimize Delamination in Carbon Fiber-Reinforced Polymer. Applied Sciences. 2024; 14(18):8512. https://doi.org/10.3390/app14188512
Chicago/Turabian StylePopan, Ioan Alexandru, Vlad I. Bocăneț, Selver Softic, Alina Ioana Popan, Nicolae Panc, and Nicolae Balc. 2024. "Artificial Intelligence Model Used for Optimizing Abrasive Water Jet Machining Parameters to Minimize Delamination in Carbon Fiber-Reinforced Polymer" Applied Sciences 14, no. 18: 8512. https://doi.org/10.3390/app14188512