1. Introduction
With the advent of vector receivers in acoustic measurements, and their active use since the middle of the 20th century, questions have persisted regarding the advisability of their practical application in place of traditional hydrophones to improve the noise immunity of receiving systems [
1,
2,
3,
4,
5]. This is mostly due to a lack of experimental research in this field, as well as problems of theoretical modeling of the formation of vector-scalar fields under complex hydrological and bathymetric conditions, especially in the shallow sea. Theoretical results obtained, for example, using the boundary value problem of Pekeris [
6,
7,
8] cannot generally be extended to more complicated cases of real conditions for the formation of vector fields in shallow-water areas. In recent years, especially in the theoretical field [
9,
10,
11], vortex structures in acoustic fields have been actively discussed, and have been registered in shallow water areas by vector receivers. However, there is still insufficient reliable experimental data related to the practical use of vortex effects in problems of noise-immune reception to validate all of the theoretical conclusions. One effective solution to the problems of using vector receivers is to set up model experiments in specified water areas, featuring a real scenario using combined signal reception from a moving underwater sound source and the subsequent analysis of the effectiveness of this scenario. This approach was used in our experiments, the results of which are presented below.
2. Materials and Methods
The goal of the experiments was to measure and analyze the interference structure of the vector sound fields and the pressure field for several variants of the source maneuvering in the waveguide, and to study the influence of the minima of acoustic energy in the acoustic field generated by the source on the noise immunity of the combined reception. The presence of deep minima of acoustic energy levels, which appear when the distance between the sources and the receivers varies, can lead to periodic loss of contact with the source, and in some cases to a complete loss of contact.
The investigations were carried out on the continental shelf of the Sea of Japan, using a combined receiving system consisting of a sound pressure channel (P) and three orthogonal sound pressure gradient components (XYZ). The receiving system was installed at given points of the experimental area at specified depths, and a low-frequency tonal acoustic source imitating a discrete component in the noise field of a moving source was towed on various tracks at a distance from the receiving system of up to a maximum of 10 km.
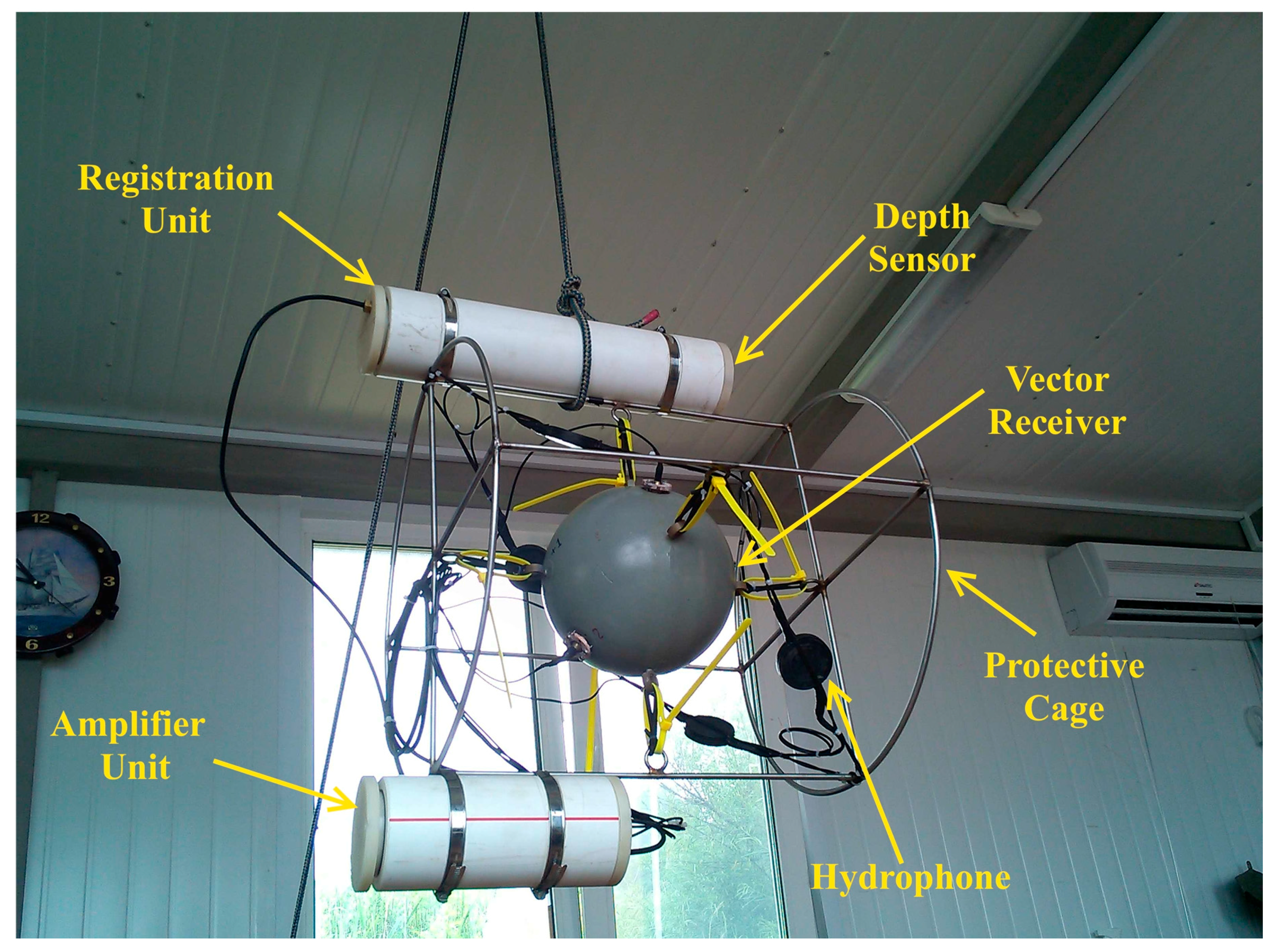
The autonomous receiving system using a combined receiver (CR) was developed and manufactured at the V.I. Il’ichev Pacific Oceanological Institute. It is a device designed to study the structure of sound fields in shallow sea conditions by recording the sound pressure and three orthogonal sound pressure gradient components, as well as to measure the position of the system in space. The creation and collection of information packets from the combined receiver and orientation sensors are realized by an autonomous digital recording unit, with all information being subsequently saved to a SD card. A photo of the CR in a protective enclosure-cage and the hermetic containers of the receiving system are shown in
Figure 1.
The devices for setting the receiving system include: a 40 kg weight, a halyard submerged to a depth of 5 to 10 m from the surface, buoyancy spheres (securing the halyard and cage from vibration due to surface waves), and a flashing beacon.
An electromagnetic towed oscillator with a static pressure compensation system was used as a tonal acoustic sound source, emitting a frequency of 134 Hz. The compensation system consisted of an air compressor installed on the towing vehicle, and a high-pressure hose connecting the compressor with the internal cavity of the radiator through the tubulure.
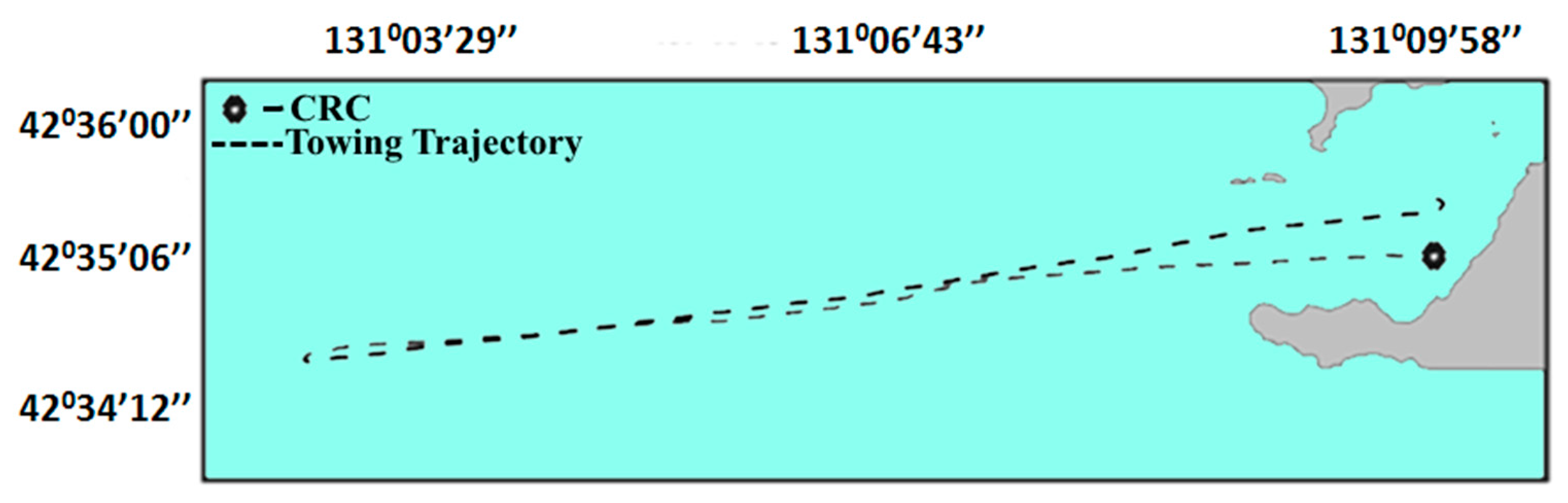
Experimental studies were carried out in two stages at a hydrophysical test site near Cape Schulz, Posiet Bay, in the Sea of Japan in the summer season. In the first stage, the combined receiver was installed in Vityaz Bay, stationary, at a depth of 27 m, with a site sea depth of 37 m. The acoustic source was towed by a yacht at a depth of 20 m and a speed of 3 knots along two routes: to a distance of around 9.5 km from the receiving system, and back to the starting point (
Figure 2).
3. Results
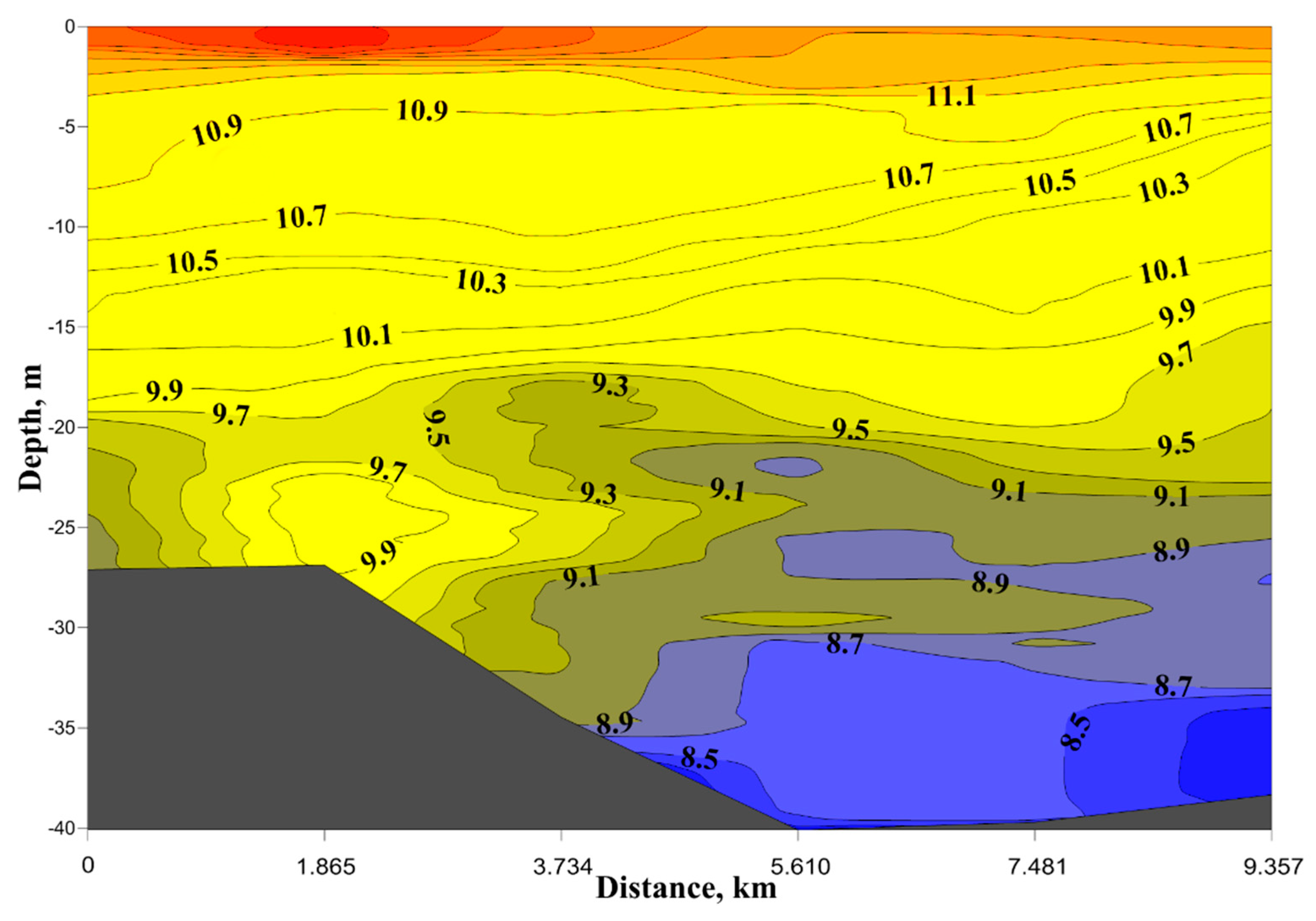
The hydrological situation in the area of the experiment was typical for the spring season, and was characterized by a nearly vertical isothermal profile for temperature in °C (
Figure 3). The same figure shows the bottom relief along the track.
The distance between the acoustic source and the receiving system was determined using a satellite navigation system. Determination of the exact position of the acoustic source during towing was performed with respect to the satellite navigation antenna located on the deck of the yacht, taking into account the submerged depth and the length of the towing halyard.
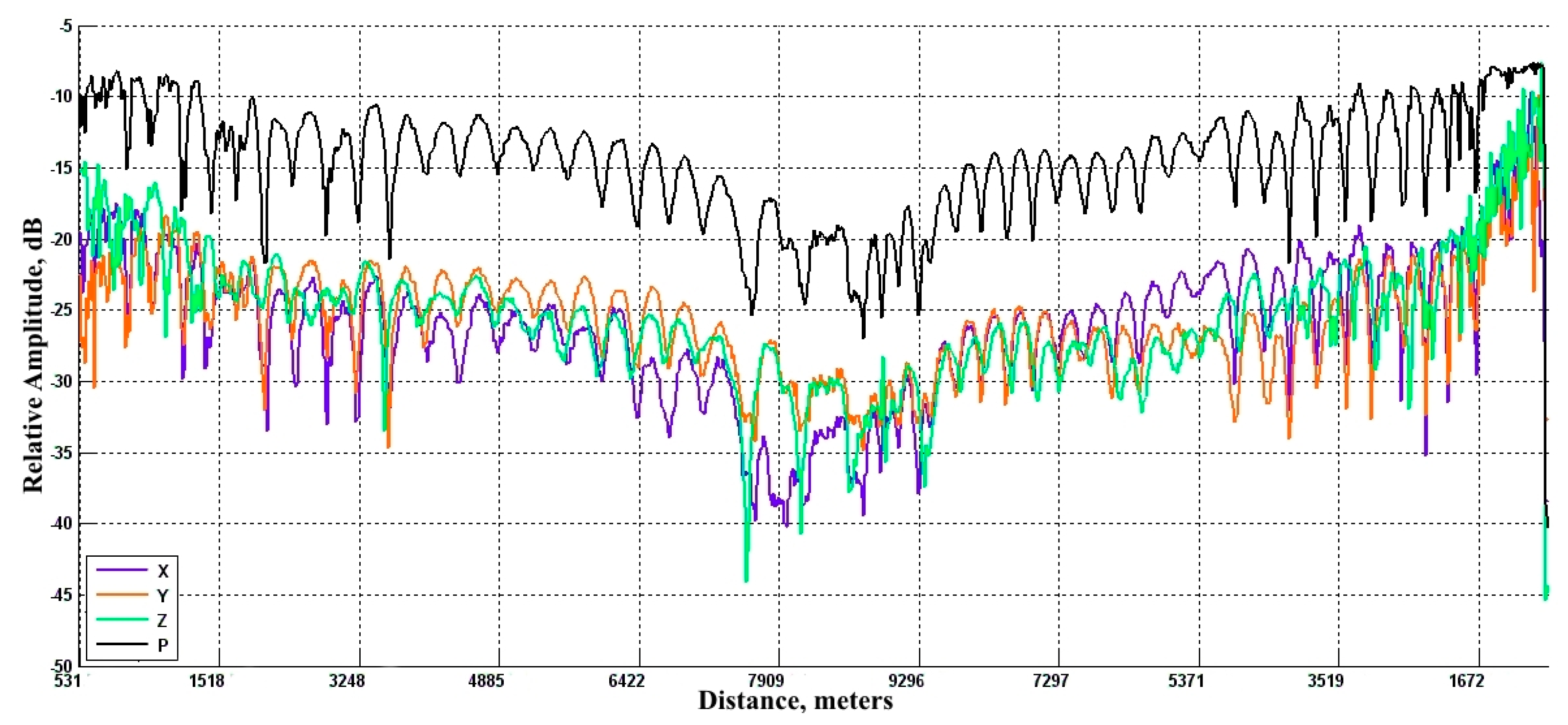
Figure 4 shows the dependence of the amplitudes of the signals from the hydrophone and the XYZ sensors of the vector receiver on the distance between the corresponding points.
Analysis of the data shows that on both routes, at distances greater than 1500 m from the receiving system, a stable interference structure with a period of about 390 m is formed, which is identical in the hydrophone and XYZ sensors. Some differences in the amplitudes of the signals on channels X and Y at distances of about 6500 m on the outgoing track and 5000 m in the return track may be due to the directivity of these channels.
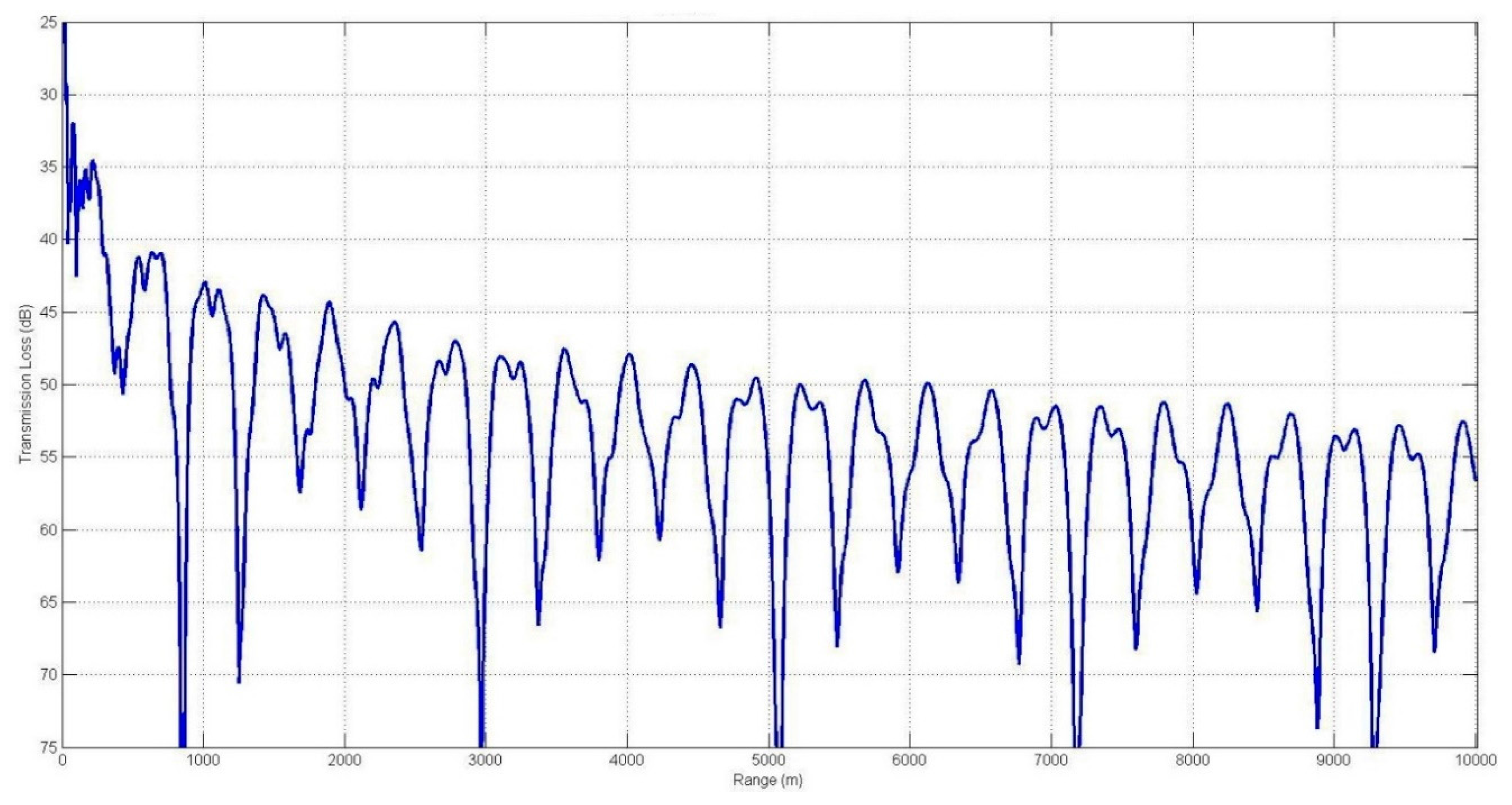
The calculations of the pressure field for the experimental conditions with the use of wave computing algorithms such as Kraken and Scooter showed a similar experimental pattern of interference, with approximately the same period (
Figure 5).
Nevertheless since transmission loss is calculated using a range-independent propagation model that does not account for the range dependence of the bathymetry, and we expect some difference with the experimental data.
The main feature of the data shown in
Figure 4 is the almost complete match of the minima and maxima of the interference structure for the hydrophone and XYZ sensors, with an amplitude variation up to 15–20 dB. Thus, neither additive nor multiplicative processing of signal information from the channels of the combined receiver mitigate the loss of contact with the sound source when it is in interference minima in the current case.
The second experiment was carried out in the Bay of Posiet.
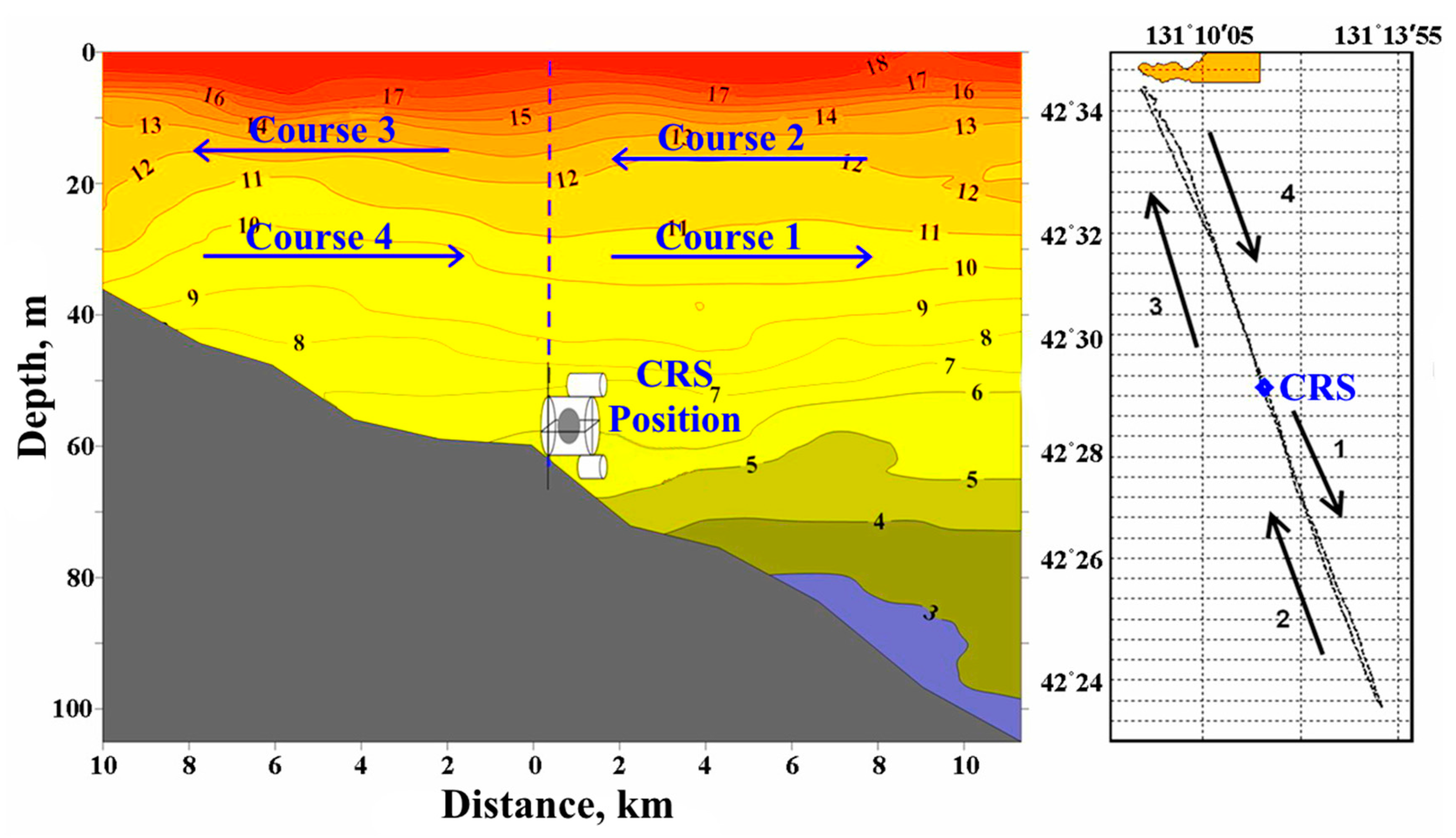
Figure 6 (the color shows temperature in °C) shows the hydrological and bathymetry conditions along the tow ship courses. The source was towed at a depth of 20 m throughout the whole period of maneuvering (courses 1–4); a tone signal with a frequency of 134 Hz was emitted. The combined receiver was installed 2 m from the bottom at a point with a sea depth of 58.5 m. The towing was first carried out from the receiving system to a distance of about 10 km in the direction of the deep sea (to the isobath of 100 m, course 1). It was towed towards the shore to the isobath of 35 m and away from the receiving system 10 km (courses 2–3), and finally returned to the receiving system (course 4). In July, a significant negative temperature gradient had already been observed. The right panel of the figure shows the experimental courses; the trajectory of the towing is shown as a dashed line.
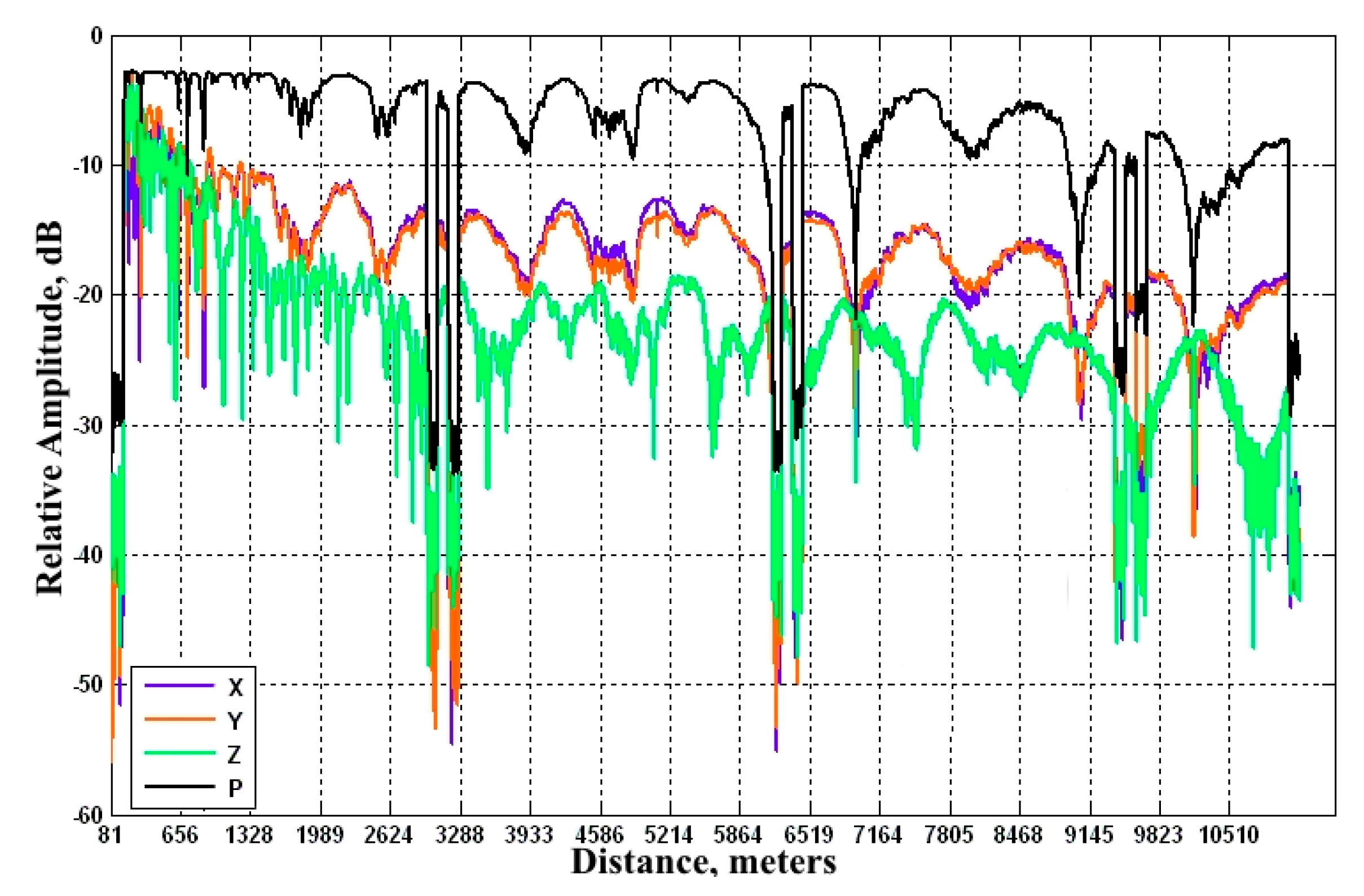
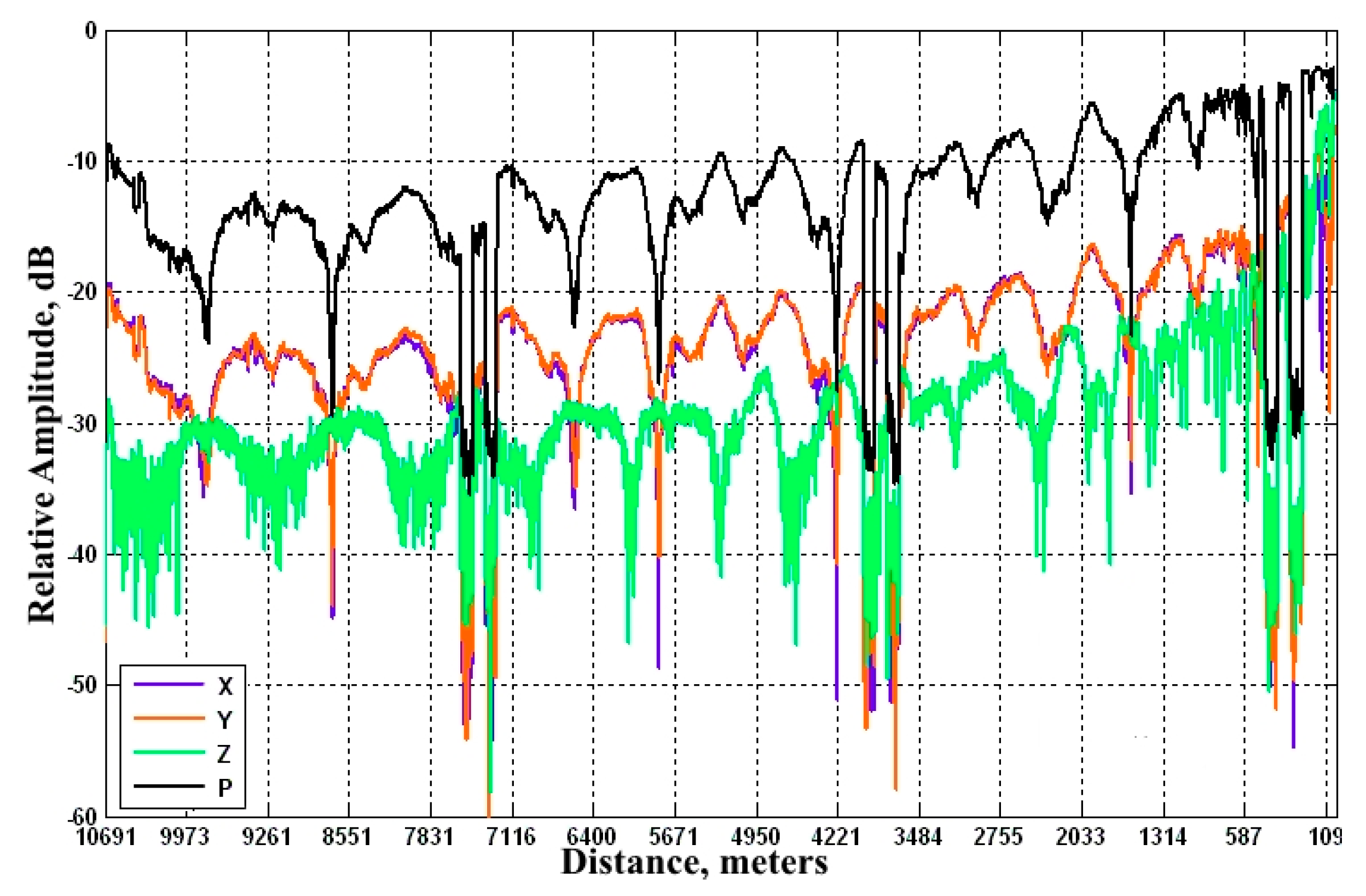
The dependence of the signal levels on the pressure channel and XYZ channels from the distance for each of the four courses is shown in
Figure 7,
Figure 8,
Figure 9 and
Figure 10. In the figures, there are 2-min pauses of emission every half hour, which were done to estimate the signal-to-ambient-noise ratio. The excess of the signals above the noise was 20–45 dB on the entire track.
The calculation of the average values of the periods of the interference structure was performed by averaging the periods measured at the minimum and maximum values and showed values of about 375 m for the courses 3 and 4 and 750 m for the courses 1 and 2.
4. Discussion
The results show that the spatial structure of the tonal sound source is characterized by stable interference, which is related to the interaction of the modes of the first orders. The periods of interference in the shallow part of the route (courses 3 and 4) are comparable in magnitude with the data obtained in the first experiment, and are easily predicted by numerical calculations involving algorithms based on a modal approach. When analyzing the data shown in
Figure 7,
Figure 8,
Figure 9 and
Figure 10, important differences were noted between the interference patterns on shallow tracks (courses 3, 4) and those on deep-water tracks (courses 1, 2). For courses 3 and 4, minima and maxima on the channels PXYZ were well matched, but for courses 1 and 2 the maximum amplitude in the channel Z was fixed in the moment of deep minima of the signal amplitudes in the pressure and XY channels. It can be assumed that in these areas, the movement of acoustic energy occurs mainly in the vertical plane. This may indicate a vortex character of the formation of the field in these areas [
9,
10,
11]. It should be noted that this feature is observed when the source moves both toward the deep sea, and toward the shore. It should also be emphasized that the processing of the signal information in all the experiments was carried out using a uniform technique on identical instruments. The practical value of the effect is very important for continuous detection of the sound source, because the loss of acoustic contact with the source will not occur in almost all variants of mutual maneuvering. This opens the possibility of processing signal information from the channels of the combined receiver for continuous detection of the sound source. It is only necessary to choose the correct scheme of information processing: additive, multiplicative or from each channel separately.
Acknowledgments
This work was supported by Russian Science Foundation, project No. 16-19-00038; by FEBEAS grants 15-I-1-046 “Research on the regularities of formation of the vector-scalar and nonlinear hydro-acoustic fields for solving fundamental and applied problems of studying the Far Eastern seas” and 15-I-1-012 o “Development and experimental approbation of a prototype of a hardware-software complex for studying and controlling the structure and dynamics of waters in coastal areas using vector acoustics methods”.
Author Contributions
Yury Morgunov and Lubov Statsenko conceived and designed the experiments; Aleksandr Radionov and Aleksandr Burenin performed the experiments; Aleksandr Golov and Peter Unru processed and analyzed the data; all authors contributed in the preparation of the paper text.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Gordienko, V.A.; Il’ichev, V.I.; Zaharov, L.N. Vector-Phase Methods in Acoustics; Science: Moscow, Russia, 1989. [Google Scholar]
- Dzyuba, V.P. Scalar-Vector Methods of Theoretical Acoustics; Dal’nauka: Vladivostok, Russia, 2006. [Google Scholar]
- Seleznev, I.A.; Glebova, G.M.; Zhbankov, G.A.; Maltsev, A.M.; Kharakhashyan, A.M. Probabilistic characteristics of signal detection by a single vector-scalar module. Underw. Res. Robot. 2016, 22, 44–49. [Google Scholar]
- Belova, N.I.; Kuznetsov, G.N.; Stepanov, A.N. Experimental research of the interference and phase structure of the power flux from a local source in shallow water. Acoust. Phys. 2016, 62, 328–338. [Google Scholar] [CrossRef]
- Shurov, V.A. Vector Acoustic of the Ocean; Dalnauka: Vladivostok, Russia, 2003. [Google Scholar]
- Dall’Osto, D.R.; Dahl, P.H.; Choi, J.W. Properties of the acoustic intensity vector field in a shallow water waveguide. J. Acoust. Soc. Am. 2012, 131, 2023–2035. [Google Scholar] [CrossRef] [PubMed]
- Santos, P.; Felisberto, P.; Hursky, P. Source localization with vector sensor array during the Makai experiment. In Proceedings of the 2nd International Conference & Exhibition on “Underwater Acoustic Measurements: Technologies & Results”, Heraklion, Greece, 25–29 June 2007; pp. 985–990. [Google Scholar]
- Nehorai, A.; Paldi, E. Acoustic vector-sensor array processing. IEEE Trans. Signal Process. 1994, 42, 2481–2491. [Google Scholar] [CrossRef]
- Chien, C.F.; Waterhouse, R.V. Singular points of intensity streamlines in two-dimensional sound fields. J. Acoust. Soc. Am. 1997, 101, 705–712. [Google Scholar] [CrossRef]
- Kuznetsov, G.N.; Stepanov, A.N. The field of an equivalent multipole composite radiator in a waveguide. Acoust. Phys. 2007, 53, 326–334. [Google Scholar] [CrossRef]
- Kuznetsov, G.N.; Stepanov, A.N. Laws approximating the decay of the vector fields of the vibration velocity and intensity for a monopole source in a waveguide. Phys. Wave Phenom. 2016, 24, 324–332. [Google Scholar] [CrossRef]
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









