Location-based applications are progressively getting more traction in our daily life, including applications such as transportation, communication, precise farming, and life-rescue operations. Positioning accuracy and consistency are the key requirements for the applications such as autonomous land vehicle driving, unmanned aerial vehicle (UAVs) and in life-critical applications. Global Navigation Satellite System (GNSS) is one of the most trustworthy positioning systems. The establishment of new GNSS constellations like the BeiDou and the Galileo has greatly increased the number of visible satellites around the global as well as new frequency signals and satellites are also added in existing GNSS constellations. These developments make it possible to use signals from multiple constellations to enhance the accuracy of user position. However, a key challenge for multiconstellation GNSS positioning is to identify the trustable satellite measurements from all visible satellites for getting true position. The quality of the estimated position depends on the ability of the receiver on getting position in the presence of outlying observations and on the receiver environments. Multipath and NLoS (non-line of sight) signals can cause errors in the satellite observations for the receiver moving in challenging environments such as urban canyons, under the elevated highway or under the dense trees. Hence it is a problematic task to achieve the positioning accuracy and reliability in such environments and it is required to adopt the positioning estimation techniques to prevent the effect of possible wrong or outlier satellite observation on the user position.
A number of algorithms and methods have been proposed to improve the GNSS receiver performance in terms of the positioning accuracy. The geometric dilution of precision—(GDOP) based best satellite selection is one of the proposed methods [
1,
2,
3,
4,
5]. The fundamental idea is to select a subset of observations having a minimum GDOP factor, though the rejection of a good observation can also lead to the minimized GDOP. Receiver autonomous integrity monitoring (RAIM) is another approach to reject outlier observations using pseudorange measurement redundancy to maintain the positioning accuracy by isolating the contaminated measurements from the good ones [
6,
7,
8], and is primarily designed for aviation applications [
9,
10]. However, for user position estimation in urban environments, visible and available satellites are rapidly changing and it is difficult to use the RAIM for satellite/pseudorange selections. Besides the satellite/observation selection techniques, several researchers also focused to improve the estimation algorithms to enhance the positioning accuracy. Least-square estimators (LSE) has been used as the fundamental algorithm for GNSS positioning since the start [
11]. LSE estimates the position of user by making a relationship between the unknown parameters and satellite to receiver geometry. However, it is assumed during LSE-based estimation, that the variance-covariance matrix of the observations, also called the dispersion matrix, is an identity matrix i.e., all the observations have same accuracy and are uncorrelated. On the other hand, real time GNSS observations have different level of accuracies depending upon the satellite elevation angle, signal strength and other radio interferences. Multiple algorithms and methods have been proposed to improve the GNSS positioning accuracy. WLSE (weighted least-squares estimation) schemes are proposed for calculating and assigning weights to the GNSS observations. In [
12], authors proposed a WLSE (weighted least-squares estimator) where signal to noise ratio and observation variance are the weight model parameters. Tabatabaei [
13] proposed a fuzzy weighted least squares method to enhance the GPS and the GLONASS (RUSSIAN GNSS) integrated navigation solution and 12 rules were defined based on the GDOP and the elevation angles of satellites for assigning weights to the GNSS observations. In [
14], authors studied, tested and compared multiple weighing schemes for GNSS positioning relying upon the elevation angle and signal to noise ratio. In [
15], two GNSS observation weighing models, sigma-elevation and CN0-elevation, are studied and compared by Sarab Tay. For the WLSE algorithms, satellite elevation angle and SNR (signal to noise ratio) are the primary focus of the researchers to compute the observation weights. However, relying on the elevation angle is not always useful because it is possible for the signal, from high elevation satellite, to be disrupted from the multipath and radio interferences especially in urban canyons. The concept of non-linear statistics (or robust statistics) has been also studied in literature by several researchers to improve the GNSS positioning accuracy. In [
16], neural networks are used to improve the performance of least absolute and least-squares estimators for robust GNSS positioning. However, the primary disadvantage is the computational cost in addition to the outfitting problem. In [
17], the concept of robust M-estimator is used to improve the performance for the GNSS positioning by calculating and adding the weight matrix during the innovation step. In [
18] multiple robust statistical estimation techniques have been discussed including M-estimators, L1 estimators and genetic algorithm. The proposed estimation process in [
18] determines a set of all possible solutions by using the minimum required number of satellites (e.g., in case of GPS, four satellites are required for positioning) using LSE. The median of remaining estimates is considered as the user position after removing possible wrong estimates and a genetic algorithm is used to minimize the estimation error. The fundamental problem for this scheme is the number of possible solutions. The addition of new constellations increases the number of available satellites for positioning in a single epoch and the number of solutions as well with the increase in computational cost. Secondly, the positioning process starts with an unknown random initial estimate such as a least-squares estimate and the iterative reweighting scheme can ignore perfectly good measurements resulting to a wrong convergence point with a bad initial estimate. Some researchers focused on the development of techniques to minimize the effect of noise parameters, such as ionospheric, multipath etc. In [
19], authors introduced the concept of the adaptive carrier smoothing to attain an optimal carrier smoothing time to minimize the cost functions related to white noise multipath and correlated multipath errors. In [
20], authors studied the application of DGNSS (differential GNSS) in smartphones for enhancement of the GNSS positioning accuracy in challenged environments. However the primary drawback for DGNSS-aided navigation is that a base station must be required for transmission of useful information and without this information host system is not able to maintain the required accuracy.
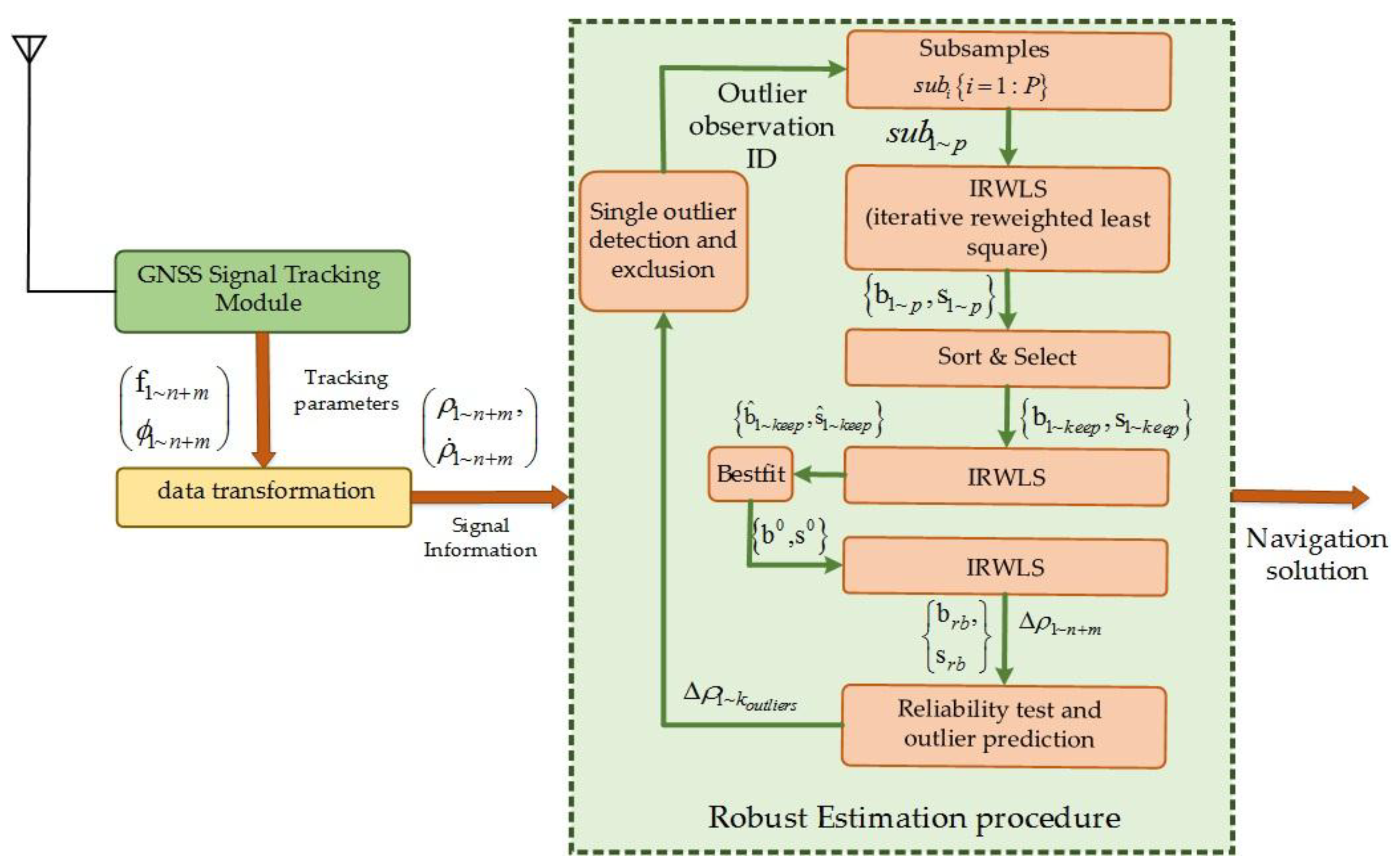
In this paper, we present a novel efficient estimation process for the GNSS positioning using signal data from multiple constellations. The proposed idea is based on the nonlinear statistical estimation theory. The proposed estimator is derived from the robust MM class estimators, proposed and named by Yohai [
21]. The MM estimator is a class of robust statistics for more efficient statistical data analysis with a high breakdown point. Breakdown point is the proportion measure of the outliers that can be treated efficiently without spoiling the results, and for the MM estimator, the breakdown point is 50%. For a reliable initial estimate, a weighing scheme is provided using prior knowledge of signal-to-noise ratio and satellite geometry of all visible satellites. A set of available pseudorange observations is divided into small subsets with adaptive subset size. A three-step IRWLS estimation process is applied to the individual subsample to minimize the effect of observation errors on the positioning accuracy. An outlier identification and exclusion process is proposed on the set of probabilistic outlying observations to maintain the reliability and the integrity of the positioning solution. Moreover, this paper is also presented as a concise tutorial for a better understanding of the proposed estimation algorithm in both theoretical and mathematical aspects.
The rest of the paper is organized as follows.
Section 2 recalls the idea of the robust estimation theory and proposed robust estimators are reviewed.
Section 3 introduces the theory and the application of the LSE model for GNSS positioning and details of the classic outlier detection exclusion process. In
Section 4, mathematical and theoretical aspects of the robust MM estimation theory are presented. Details of the custom designed software receiver for performance analysis is presented in
Section 5. The proposed estimation algorithm for multiconstellation positioning is explained in
Section 6.
Section 7 deals with the outlier detection and exclusion process in detail. In
Section 8, a detailed discussion is provided related to key modifications in the original statistical estimation procedure and a very similar GNSS positioning scheme [
18], based on the robust statistics, is analyzed and compared with our proposed estimation scheme. Results of the proposed estimation algorithm are analyzed and discussed against LSE and WLSE algorithms for several field and simulation tests in multiple scenarios and environments in
Section 9. A conclusion is drawn in the last section with future enhancements.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












