
Design of a New Drip Irrigation Belt Recovery Machine with Anti Breakage Function
Abstract
:1. Introduction
2. Materials and Methods
2.1. Structure and Working Principle
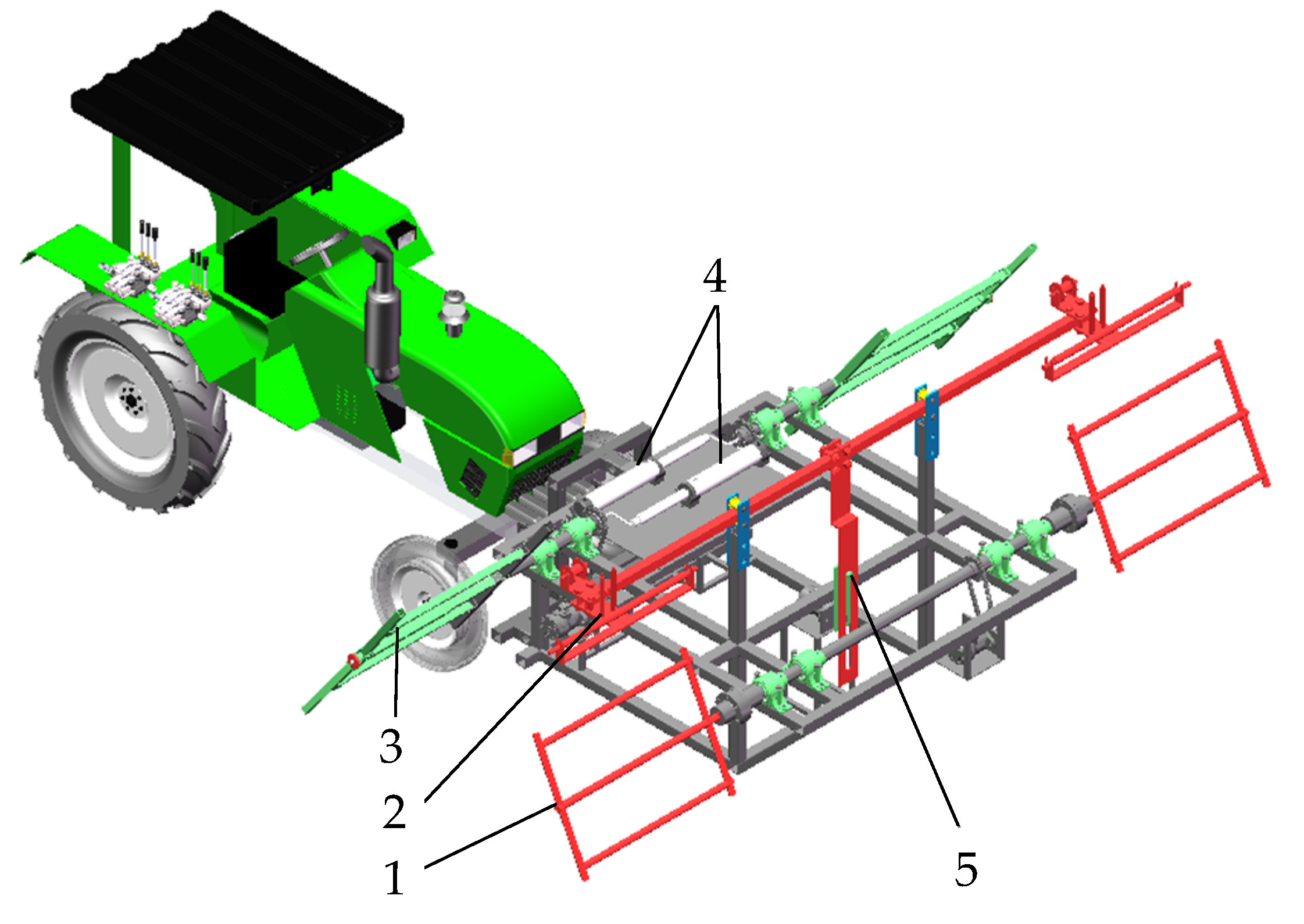
2.1.1. Structure of Drip Irrigation Belt Recovery Machine
2.1.2. Working Principle of Drip Irrigation Belt Recovery Machine
2.2. Design of Key Mechanisms
2.2.1. Design of Winding Mechanism
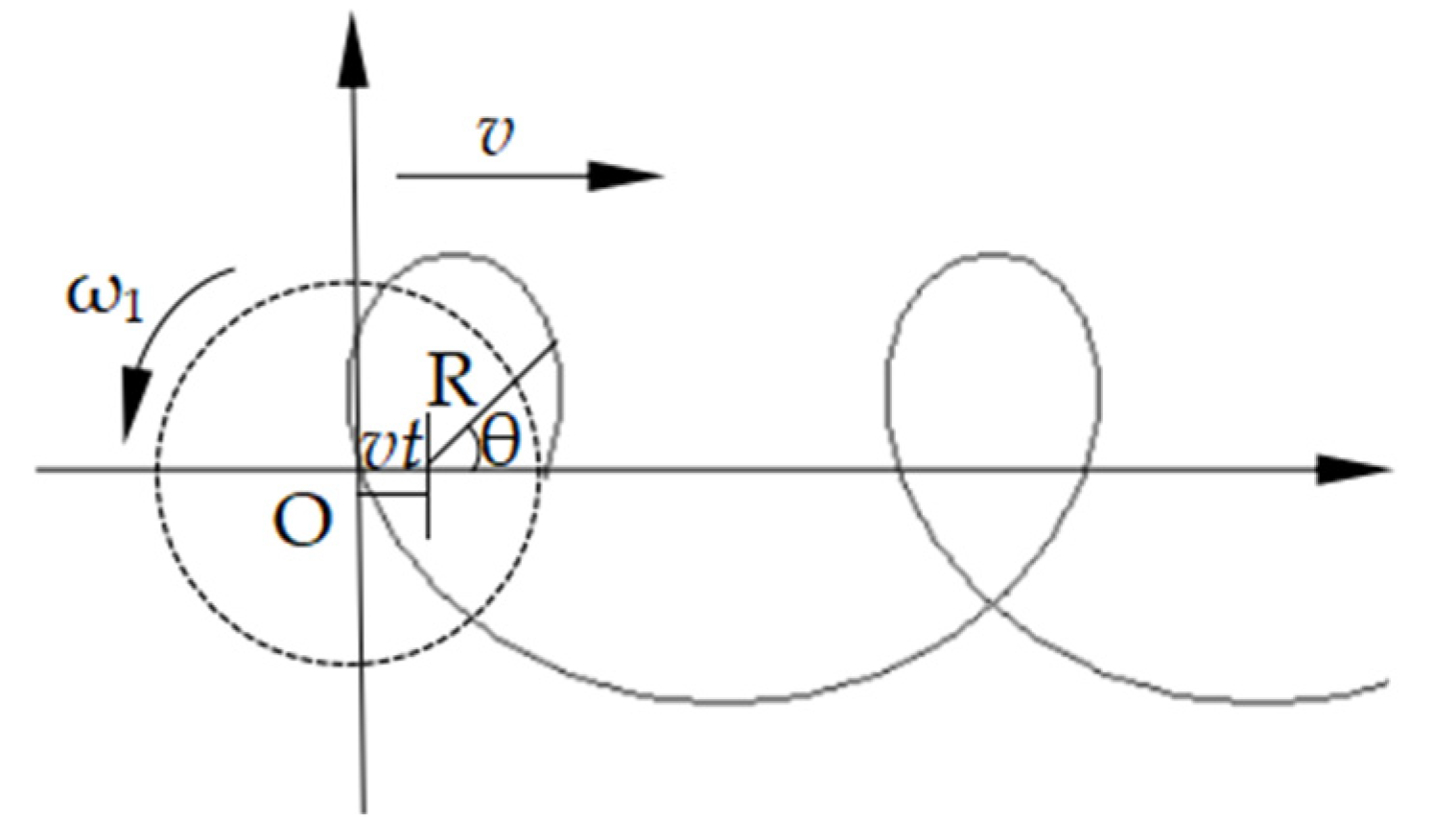
2.2.2. Design of Drip Irrigation Belt Beating Mechanism
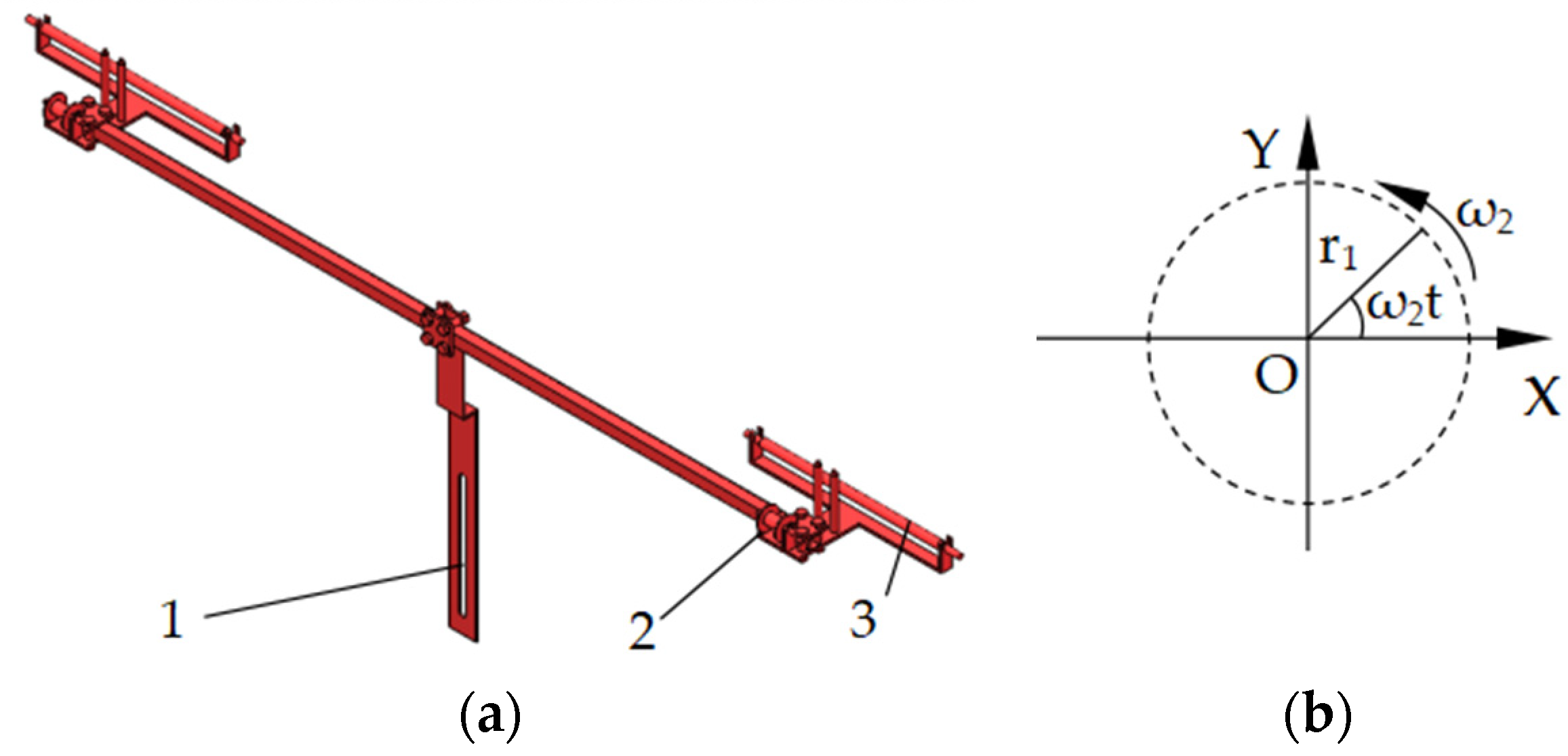
2.2.3. Design of Belt Arrangement Mechanism
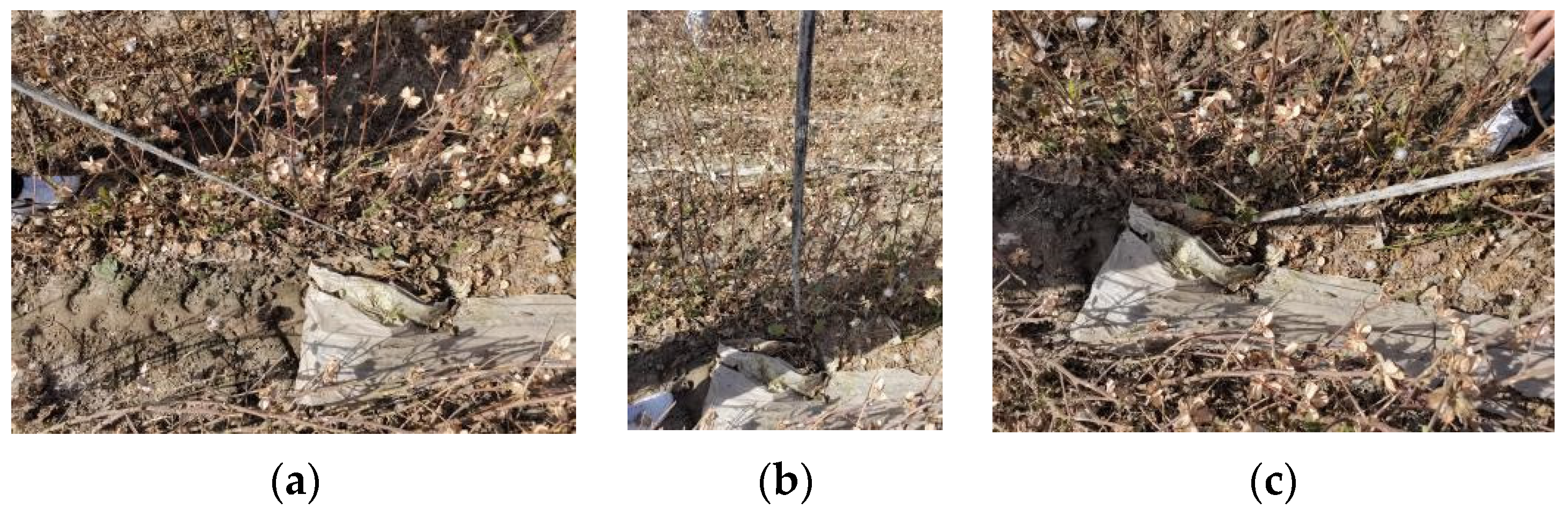
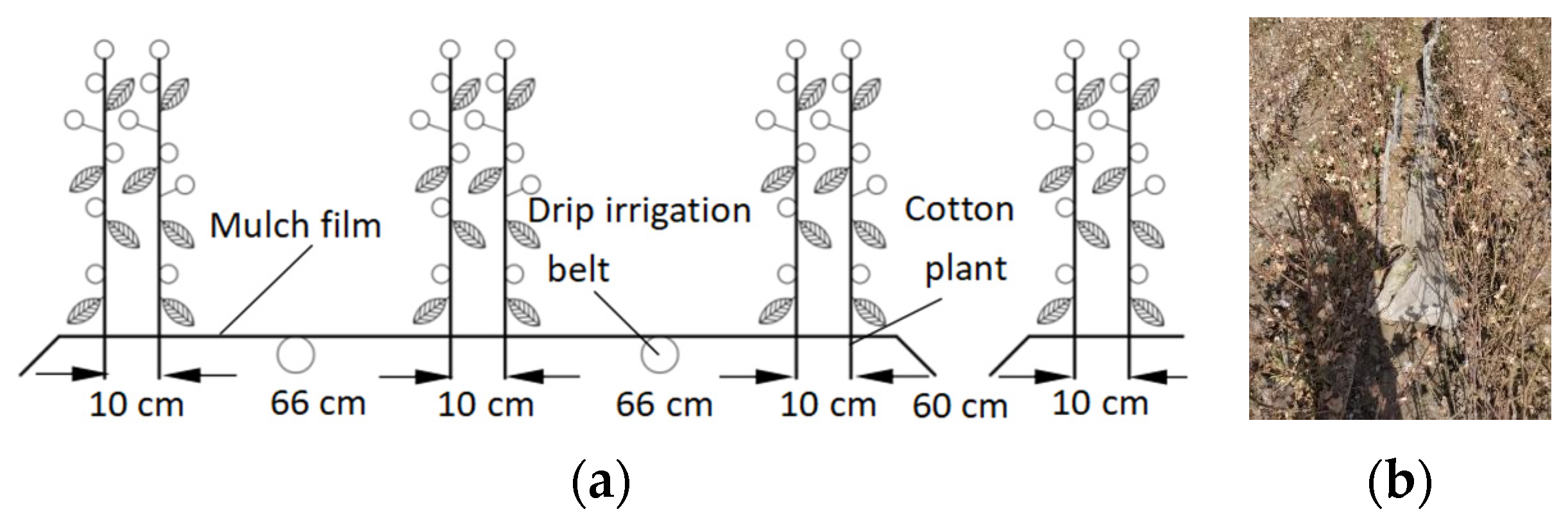
2.3. Experimental Design
2.3.1. Equipment and Materials for Test
2.3.2. Methods of Experiment and Data Analysis
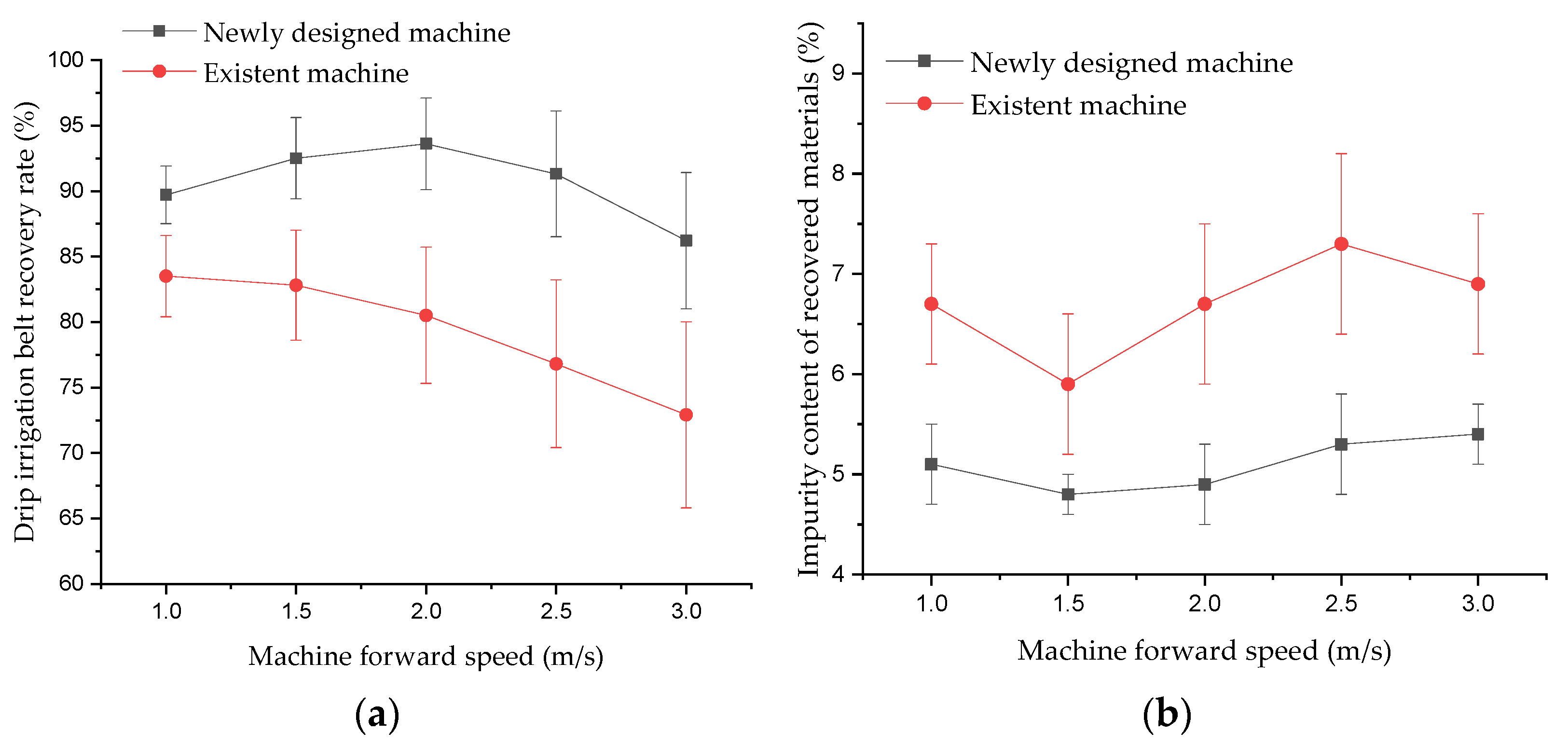
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yuan, S.Q.; Li, H.; Wang, X.K. Status, problems, trends and suggestions for water-saving irrigation equipment in China. J. Drain. Irrig. Mach. Eng. 2015, 33, 78–92. [Google Scholar]
- Zhai, G.L.; Chen, G.; Feng, J.J. Simulative experiment of clogging performance of the dripirrigationtape with three-stage path. Trans. CSAE 2006, 22, 36–39. [Google Scholar]
- Jiang, Z.C.; Shi, J.X. Design and experiment on the drip irrigation belt recovering machine. Xinjiang Agric. Mech. 2016, 19–20. [Google Scholar] [CrossRef]
- Niu, H.L.; Wang, J.K.; Luo, W. Design of 4DJ type drip irrigation belt recovery machine. Xinjiang Agric. Mech. 2017, 5–7. [Google Scholar] [CrossRef]
- Dong, L.X.; Cui, J.W.; Sun, G.X. Study on the performance and application of minor-caliber drip tape. Water Sav. Irrig. 2006, 10–12. [Google Scholar]
- Han, H.; Du, W.L.; Chang, R. The tensile test research of old drip tapes. Water Sav. Irrig. 2015, 24–26. [Google Scholar]
- Li, X.W.; Shi, J.C.; Wang, S. Numerical simulation and analysis on depth of disposable tape in cotton field under subsurface drip irrigation in Xinjiang, China. Trans. Chin. Soc. Agric. Mach. 2017, 48, 191–198. [Google Scholar]
- Xu, F.P.; Li Yun, K.; Ren, S.M. Investigation and discussion of drip irrigation under mulch in Xinjiang Uygur Autonomous Region. Trans. CSAE 2003, 19, 25–27. [Google Scholar]
- Kong, F.Y.; Hu, T.J. Underground drip irrigation test in different drip irrigation zone with different lay intervals. Chin. Agric. Sci. Bull. 2004, 20, 331–333. [Google Scholar]
- Ran, J.H.; Ren, Y.; Guo, W.S.; Hu, C.; Wang, X.F. Aging characteristics of drip irrigation belt in Xinjiang cotton fields and their effects on its recovery and recycling. Sci. Rep. 2023, 13, 16948. [Google Scholar] [CrossRef]
- Sahin, M. Potential use of subsurface drip irrigation systems in landscape irrigation under full and limited irrigation conditions. Sustainability 2023, 15, 15053. [Google Scholar] [CrossRef]
- Hilaire, R.S.; Arnold, M.A.; Wilkerson, D.C.; Devitt, D.A.; Hurd, B.H.; Lesikar, B.J.; Zoldoske, D.F. Efficient water use in residential urban landscapes. HortScience 2008, 43, 2081–2092. [Google Scholar] [CrossRef]
- Orta, A.H.; Todorovic, M.; Ahi, Y. Cool-and warm-season turfgrass irrigation with subsurface drip and sprinkler methods using different water management strategies and tools. Water 2023, 15, 272. [Google Scholar] [CrossRef]
- Ding, S.S.; Li, T.W.; Wang, J.K. Analysis of power consumption of 4HS type drip irrigation belt recovery machine. J. Chin. Agric. Mech. 2015, 36, 299–302. [Google Scholar]
- Gong, H.H.; Wang, J.K.; Duan, W.X. Design of 4HR type drip irrigation belt recovery machine. Xinjiang Agric. Mech. 2015, 9–11. [Google Scholar] [CrossRef]
- Tang, A.M.; Luo, J.H. Dyestripping and recovery of 2JMSD-4.5 type drip irrigation belt machine. Xinjiang Agric. Mech. 2008, 12. [Google Scholar] [CrossRef]
- Tian, X.L.; Zhao, Y.; Chen, X.G. Development of 4JSM-2000A type combined operation machine for cotton stalk chopping and residual plastic film collecting. Trans. CSAE 2018, 34, 25–35. [Google Scholar]
- Liu, X.F.; Shi, X.; Guo, Z.F. Performance test on roller type residual film recycling machine. Trans. CSAE 2017, 33, 26–31. [Google Scholar]
- Zhao, Y.; Zheng, X.; Chen, X.G. Design and test of CMJY-1500 type plastic film residue collecting and balling machine. Trans. CSAE 2017, 33, 1–9. [Google Scholar]
- Wang, Z.C.; Li, X.Y.; Shi, H.B. Effects of residual plastic film on soil hydrodynamic parameters and soil Structure. Trans. Chin. Soc. Agric. Mach. 2015, 46, 101–106. [Google Scholar]
- Zhang, J.X.; Wang, X.N.; Zhang, L. Effects of mechanical tensile properties of plastic film on plastic recycling method. Trans. CSAE 2015, 31, 41–47. [Google Scholar]
- Guo, W.S.; Jian, J.M.; San, Y.L. Design and experimental optimization of 4CML-1000 type chain rake film recycling machine. Trans. Chin. Soc. Agric. Mach. 2018, 49, 66–73. [Google Scholar]
- Zhao, Y.; Chen, X.G.; Wen, H.J. Research status and prospect of control technology for residual plastic film pollution in farmland. Trans. Chin. Soc. Agric. Mach. 2017, 48, 1–14. [Google Scholar]
- Xie, J.H.; Chen, X.G.; Sun, C.W. Unloading film process analysis and high-velocity photography experiment of pole-tooth residual plastic film collector. Trans. CSAE 2017, 33, 17–24. [Google Scholar]
- You, J.H.; Chen, X.G.; Zhang, B.H. Design and experiment of 4JSM-2000 type combined operation machine for cotton stalk chopping and residual plastic film collecting. Trans. CSAE 2017, 33, 10–16. [Google Scholar]
- Pu, B.S.; Chen, Y.K.; Wang, T.; Huang, Y.Y. Development status of automated guided vehicle technology and its application and prospect in agriculture. Jiangsu Agric. Sci. 2020, 48, 61–65. [Google Scholar]
- Xu, J. Analysis and optimization for lifting mechanism of scissor-fork lifter. Mech. Sci. Technol. Aerosp. Eng. 2013, 32, 919–922. [Google Scholar]
- Liu, J.Y. Force analysis of scissor lift mechanisms. J. PLA Univ. Sci. Technol. Nat. Sci. Ed. 2014, 15, 133–138. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | The Percentage of Each Component in the Total Weight of Recovered Materials (%) | |
|---|---|---|
| The Impurities Contained in Drip Irrigation Belts Recovered by the Newly Designed Machine | Impurities Contained in Drip Irrigation Belts Recovered by Control Group Machine | |
| Soil | 3.8 | 4.7 |
| Mulch film | 0.8 | 1.1 |
| Weed | 0.5 | 0.9 |
| Total | 5.1 | 6.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ran, J.; Song, Z.; Zhang, Q.; Guo, W.; Wang, X. Design of a New Drip Irrigation Belt Recovery Machine with Anti Breakage Function. Agriculture 2024, 14, 421. https://doi.org/10.3390/agriculture14030421
Ran J, Song Z, Zhang Q, Guo W, Wang X. Design of a New Drip Irrigation Belt Recovery Machine with Anti Breakage Function. Agriculture. 2024; 14(3):421. https://doi.org/10.3390/agriculture14030421
Chicago/Turabian StyleRan, Junhui, Zhipeng Song, Quan Zhang, Wensong Guo, and Xufeng Wang. 2024. "Design of a New Drip Irrigation Belt Recovery Machine with Anti Breakage Function" Agriculture 14, no. 3: 421. https://doi.org/10.3390/agriculture14030421