Fin stabilizers, normally a pair or two, are anti-roll devices located below the water line on both bilge sides of a ship hull to resist the rolling motion of a seaway. With a long development history, they are commonly used by various ships, such as cruise ships, to provide comfort and safety to passengers. Many researchers have investigated general stabilizers, such as the rolling tank [
1], moving weight [
2], gyroscope [
3], and bilge keel [
4,
5], which stabilize the ship’s roll motion at a low ship speed. However, obstacles include their large size, power, or cost demands [
6].
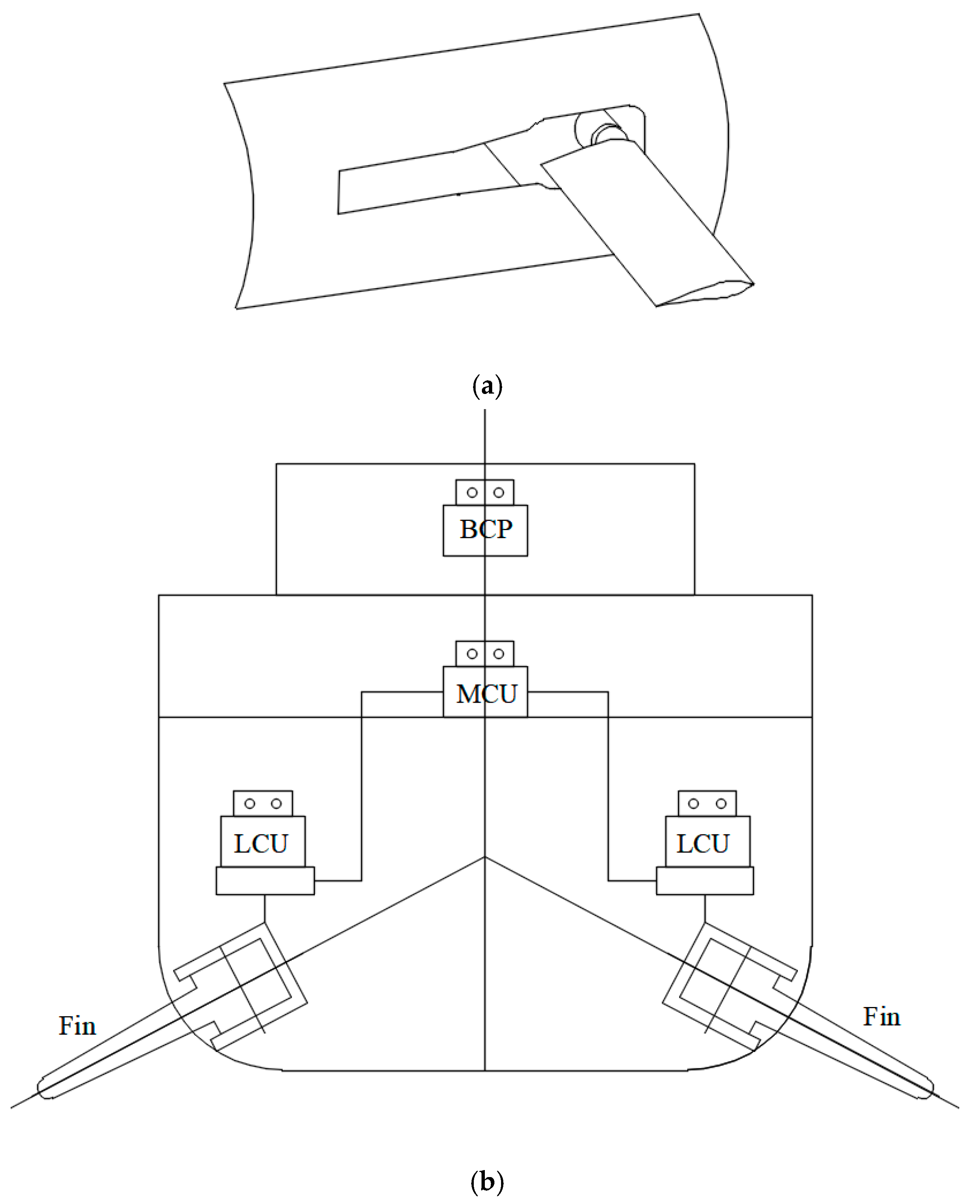
A pair of fin stabilizers usually consists of two fins with hydraulic power units and local control units (LCU), one bridge control panel (BCP), a main control unit (MCU), and a roll motion sensor unit (RMSU) [
7], as shown in
Figure 1.
A procedure was provided for selecting and evaluating the ship roll stabilization systems, including passive tank, bilge keels, activated fins, and rudder roll stabilizers [
8].
1.1. Review of the Fin Stabilizers Development
MARIN investigated the steady and unsteady performance of the fin hydrofoil while three different ships with fin stabilizers underwent a model test and numerical calculation for fin lift and drag characteristics [
9,
10]. Consideration has been made for a constraint on the effective angle of attachment to prevent dynamic stall [
11].
From the resistance point of view, the with/without (W/O) status of the fin stabilizers is a matter attracting researchers’ attention. The numerical analysis of the fin’s resistance and bare hull with/without fins was computed and compared to the towing tank data [
12]. A resistance model test and numerical simulations were conducted on a container ship with fins located at the forebody [
13]. However, only small angles at 5° and 10° were investigated. For a 1412 t displacement yacht, the resistance with fins increased by about 6% compared to that without fins [
14]. The ship resistance of fin stabilizers with NACA 0013 hydrofoil on patrol boats with angles of 0°, 5°, 10°, and 15° and speed variations of 25–30 kn was calculated with the CFD tool; the drag increased due to the rise in the fins’ angles. At an angle of 15°, the increments were 13.92–18.79% of the total drag of the ship [
15].
In conclusion, previous research has demonstrated that with a fin angle of 0°, the ship resistance is <2%, and at an attack angle of 15°, it is 17.5%. However, few experimental verifications for the fin stabilizer influence the resistance performance of overhang fins.
The fin stabilizer is the most used anti-rolling device for ships nowadays and is only considered for its good stabilization effect at moderate speed. It is difficult to generate sufficient lift for efficient roll reduction at lower speeds. The best way to resolve this problem is to improve the conventional fin stabilizer to have an anti-rolling ability at all ranges of speeds; this improved version is called the zero-speed fin stabilizer [
16]. Unlike the conventional fin rotation along the wing section axis to provide lift, at zero speed there is another “paddle” mode for providing larger lift, which is rotation along the chord-wise axis, with a small aspect ratio and an eccentric shaft position [
17]. A pair of fin stabilizers was used to generate the anti-rolling force to reduce the ship’s roll motion at zero speed using the paddle principle.
Recently, research on novel stabilizers such as high-lift fin [
18,
19] and Magnus stabilizers has emerged [
20,
21]. The former is based on bionics principles. One of the high-lift fins has the application of the proper amount of bump shapes at the leading edge of the fin, while the morphing humpback fin can provide more lifting force at a small angle of attack [
18]. Another factor is the variable area of parallelogram fin stabilizers, which had a 50% higher increase in lifting force than conventional rectangle fin stabilizers at zero speed [
19]. The latter is a novel device for the anti-rolling of ships, which generates lift through a high-speed rotating rotor (rotor wing) based on the Magnus effect.
Although fin stabilizer technology has been applied to marine ships, cruise ships are different from other ships due to their high safety and comfort requirements during the voyage. It is particularly critical to customize the fin stabilizer to the specific parameters of the cruise ships to avoid excessively high resistance to the cruise ship when stretching for maximizing the rolling stabilization [
22]. Generally, with a passenger capacity above 5000 people, the Oasis-class cruise ships mainly adopt fin stabilizers to keep the ship stable [
23].
The parametric roll motion of a cruise ship with 500,000 t displacement and fin stabilizers was investigated in fin gains and aspect ratio [
24]. A numerical analysis of the wave-induced motion of a cruise ship with stabilizing fins was conducted [
25].
When the ship’s speed is 23 kn (moderate speed), the roll amplitude of the controlled system is reduced by 90.1%. When the ship’s speed is 7 kn (low speed), the roll amplitude is reduced by 52.3% [
26].











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}