
Numerical Simulation of the Unsteady Airwake of the Liaoning Carrier Based on the DDES Model Coupled with Overset Grid

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Numerical Method
2.1. DDES (Delayed Detached Eddy Simulation) Model
2.2. Overset Grid
2.3. Post-Process
2.3.1. Q-Criterion
2.3.2. Turbulence Intensity
3. Numerical Calculations for the Aircraft Carrier
3.1. Geometry Model
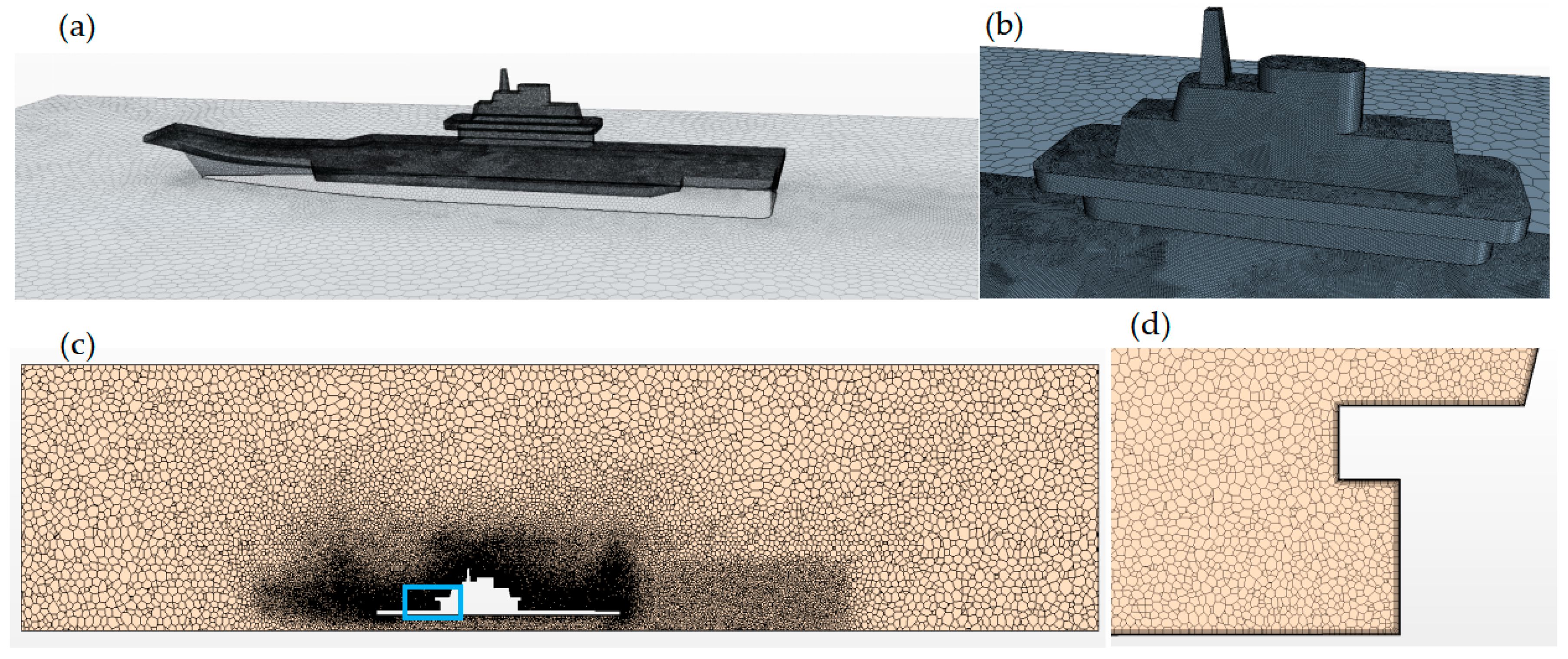
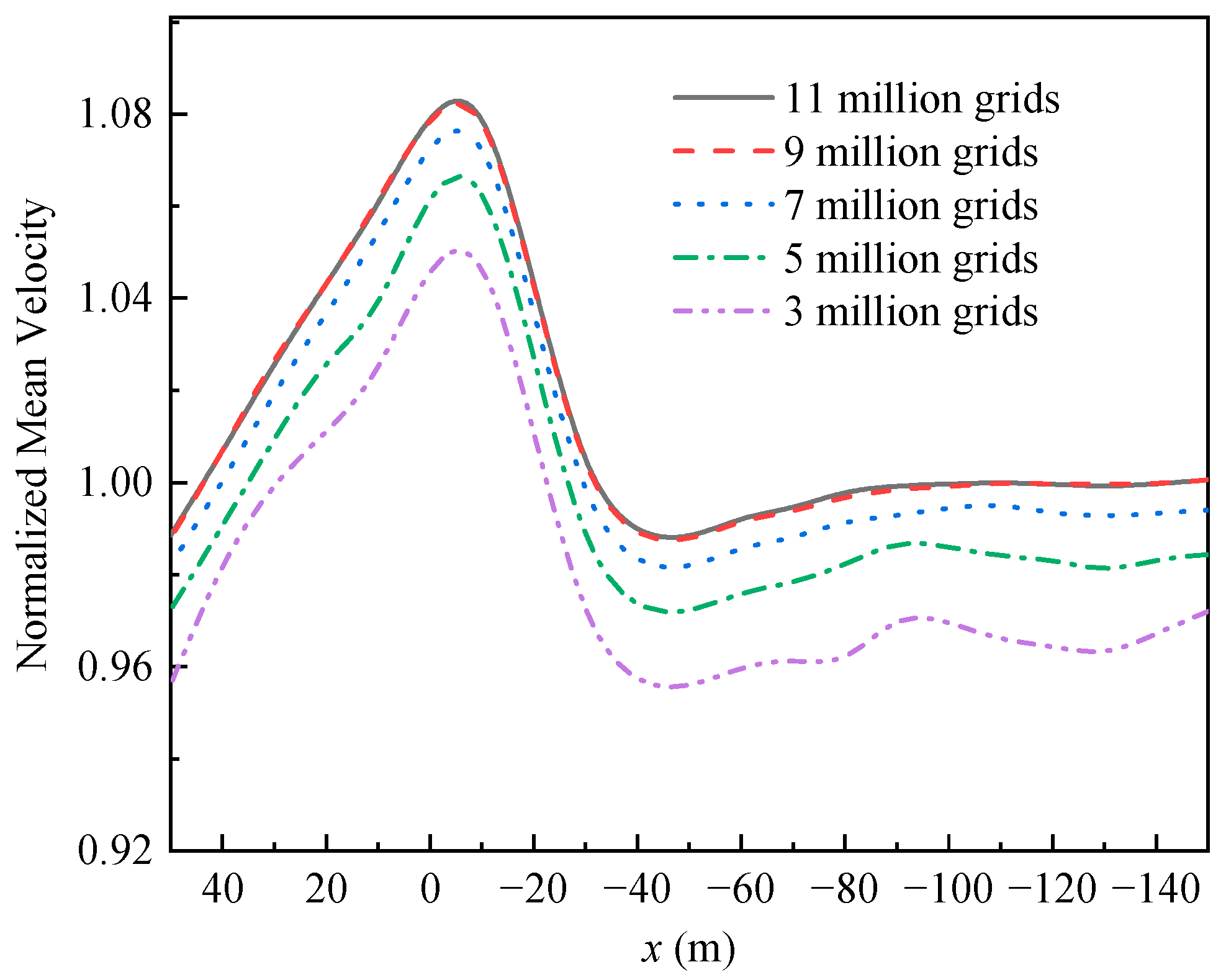
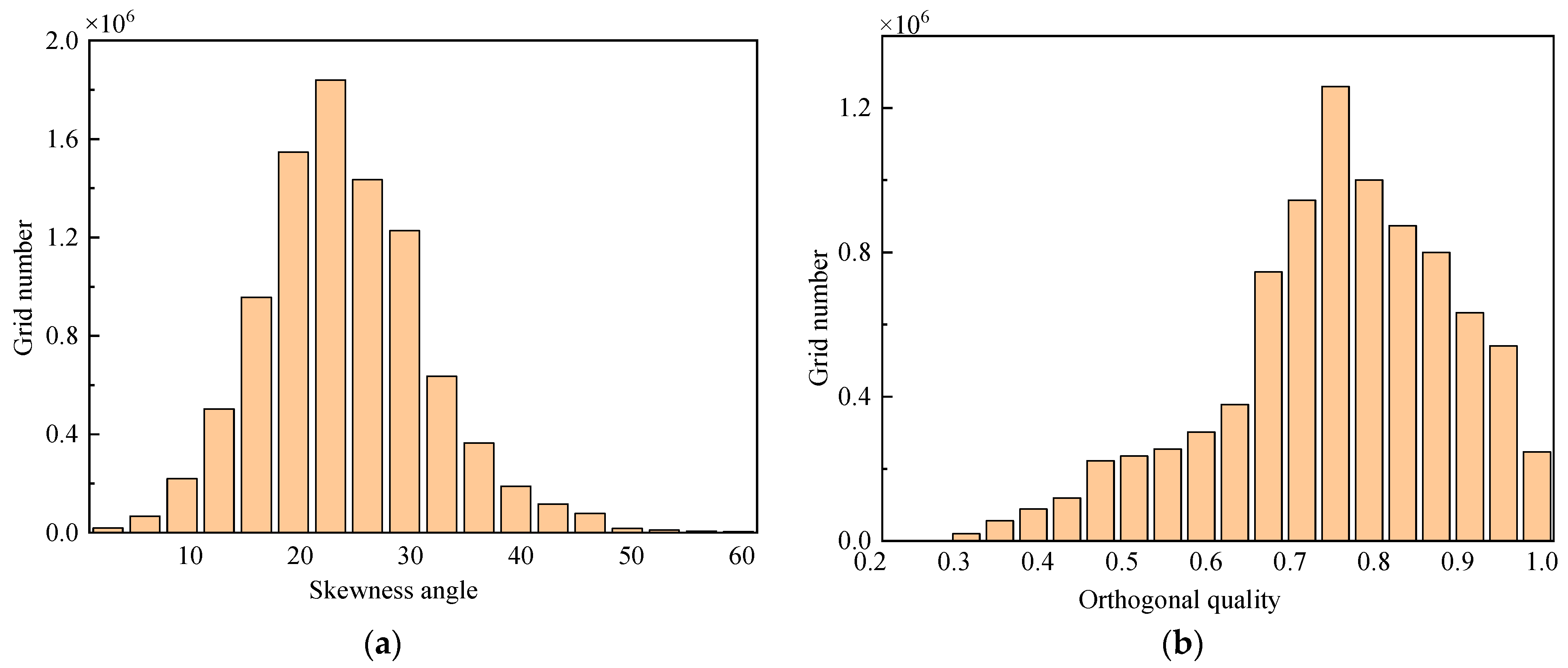
3.2. Mesh Gridding
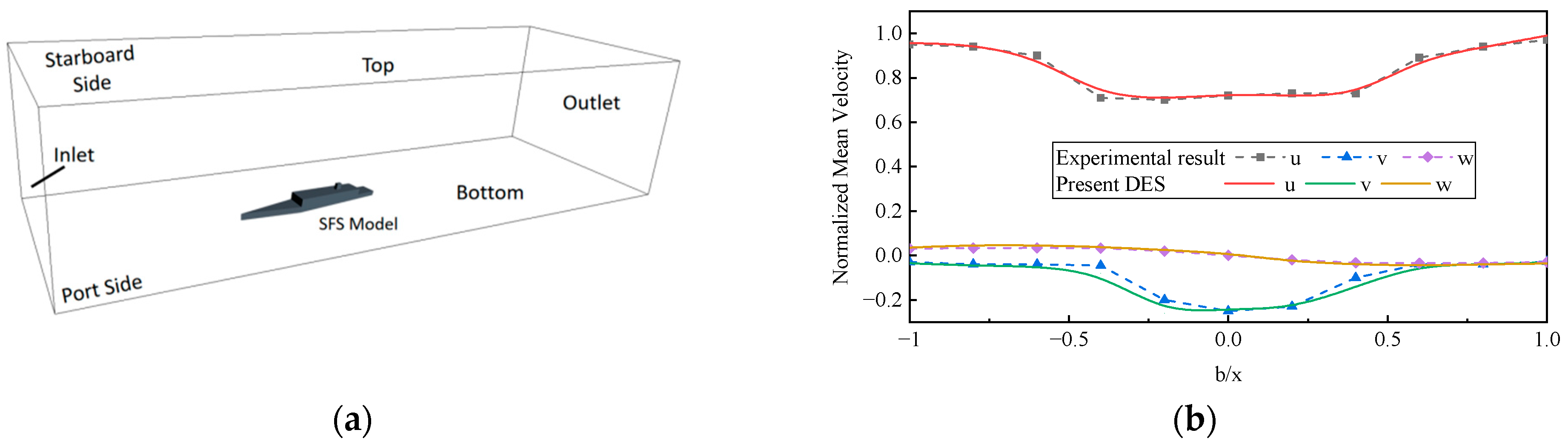
3.3. Boundary Conditions
4. Results and Discussion
4.1. Numerical Methods Validation
4.2. DDES Scaled-Down Model Results
4.3. Full-Size DDES Numerical Study
4.4. Effects of Hull Motion on Airwake
4.4.1. Headwind with Heave
4.4.2. Green 15° with Heave Motion
5. Conclusions
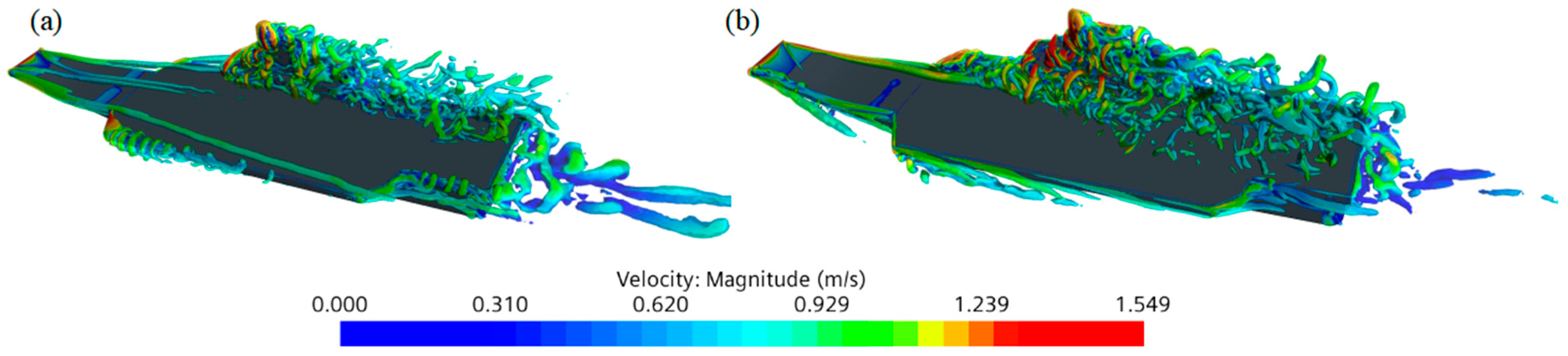
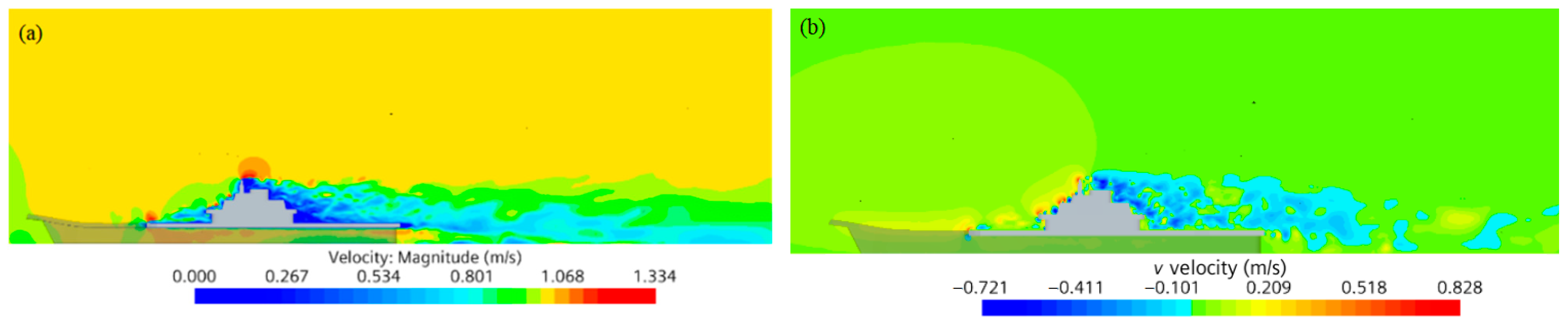
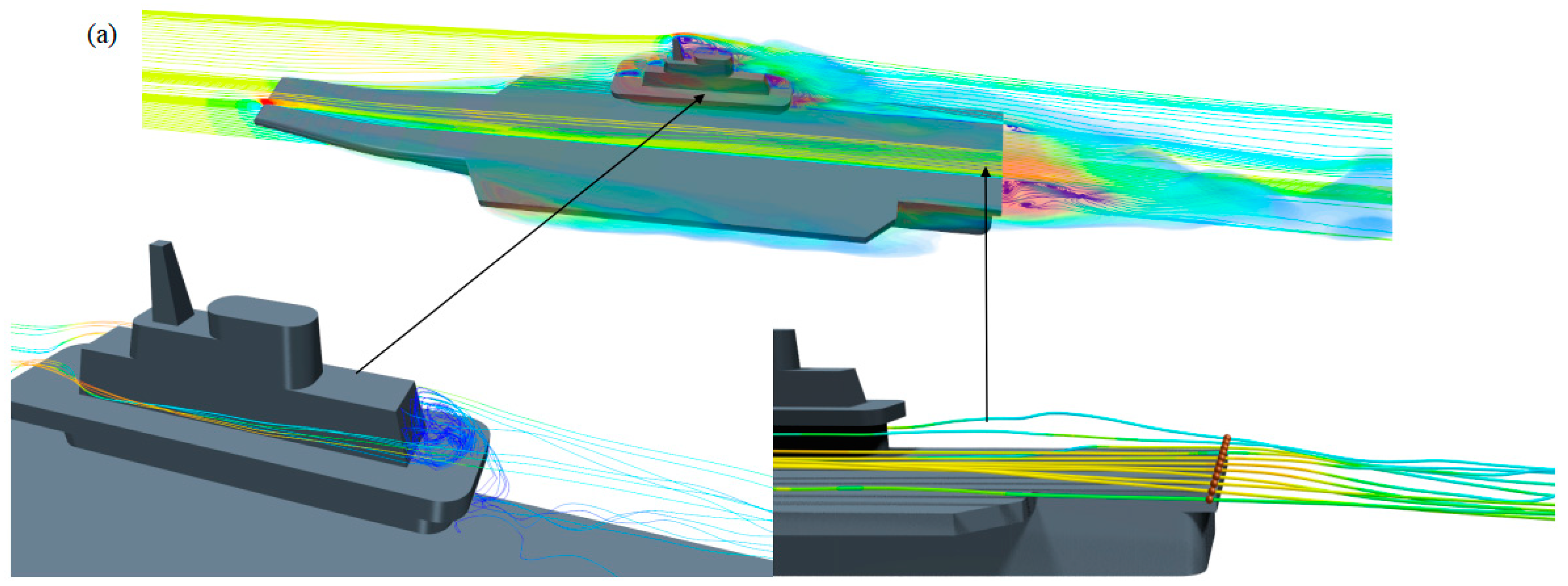
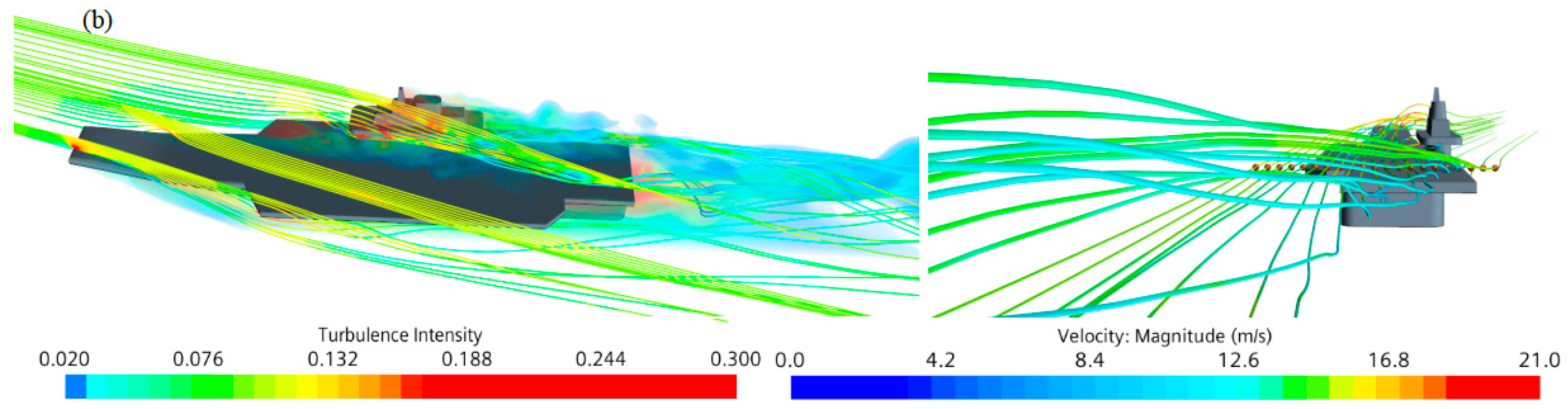
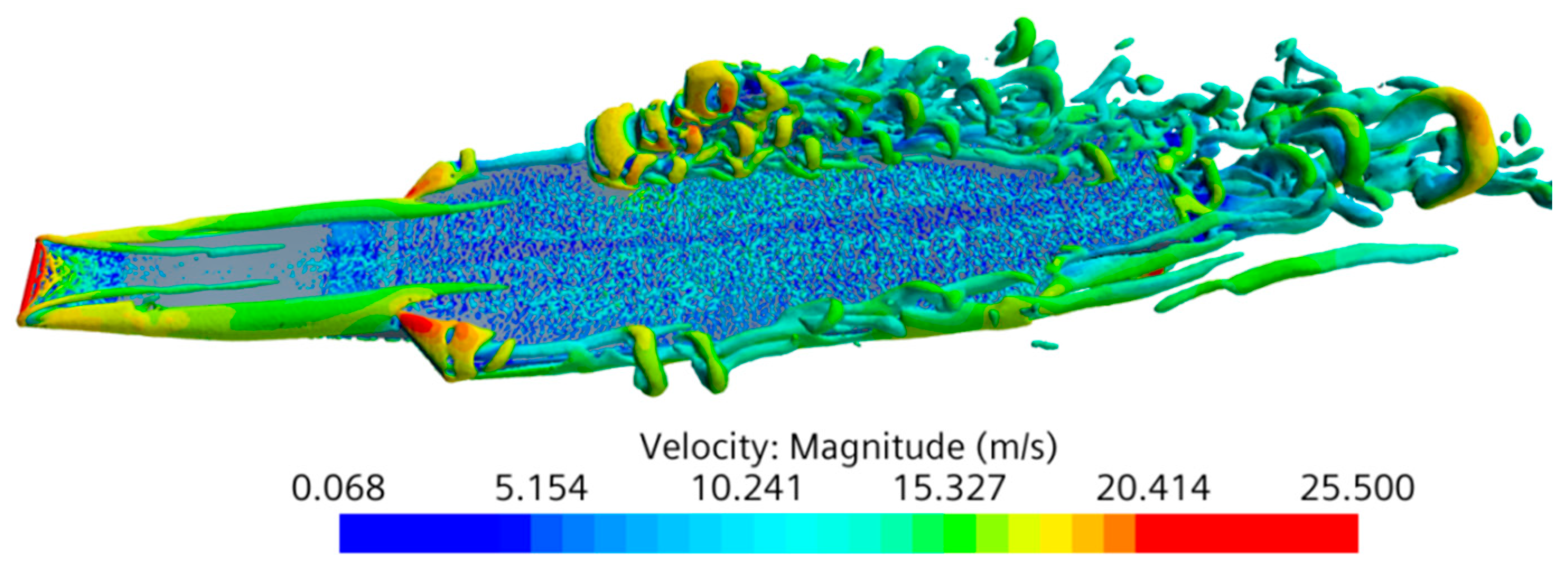
- The DDES method was employed to simulate the airwake of the carrier hull under the stationary condition using a scaled model. Flow separation was found to occur mainly at the upturned bow deck, the forward edge, and the protruding island. A clear downwash area appeared after passing the aft edge of the deck.
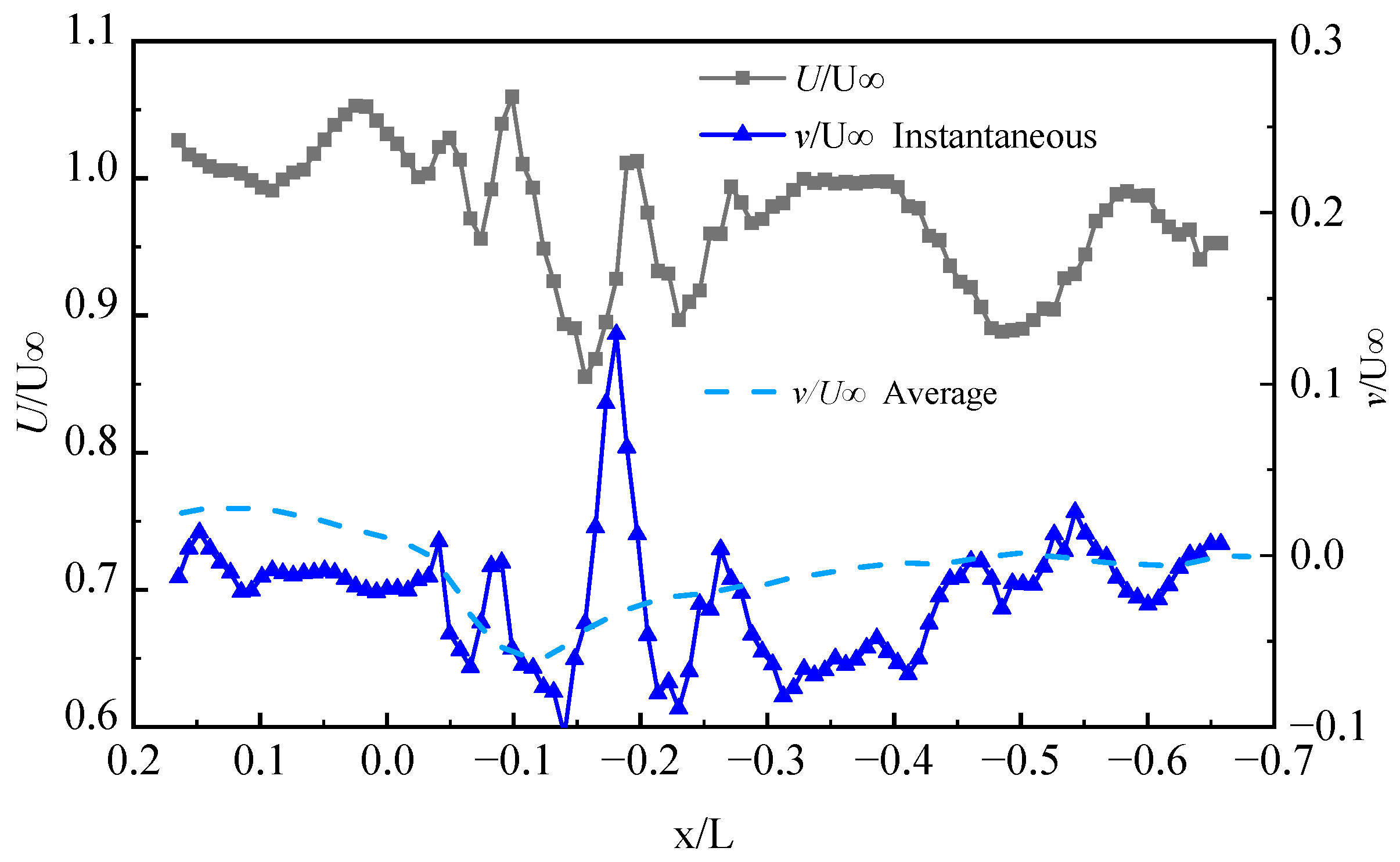
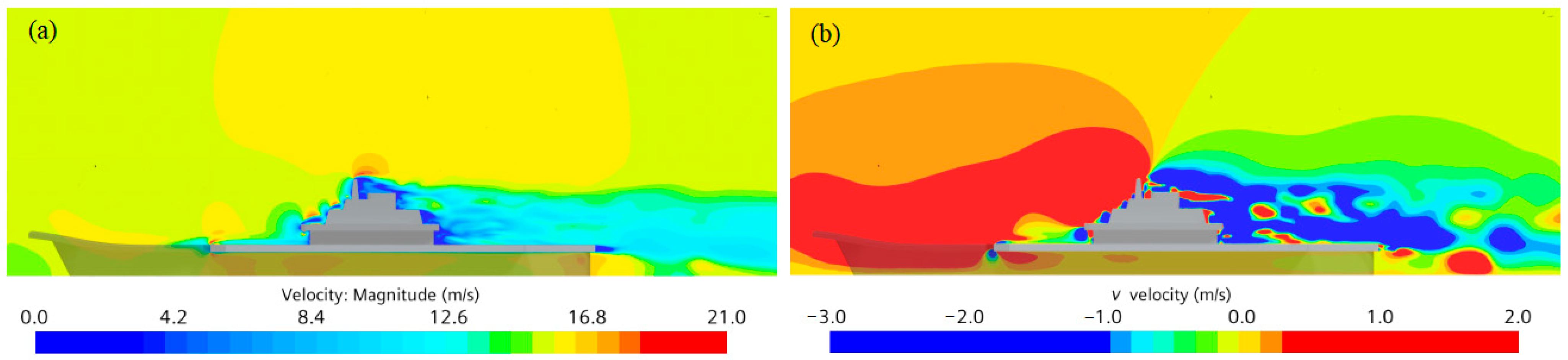
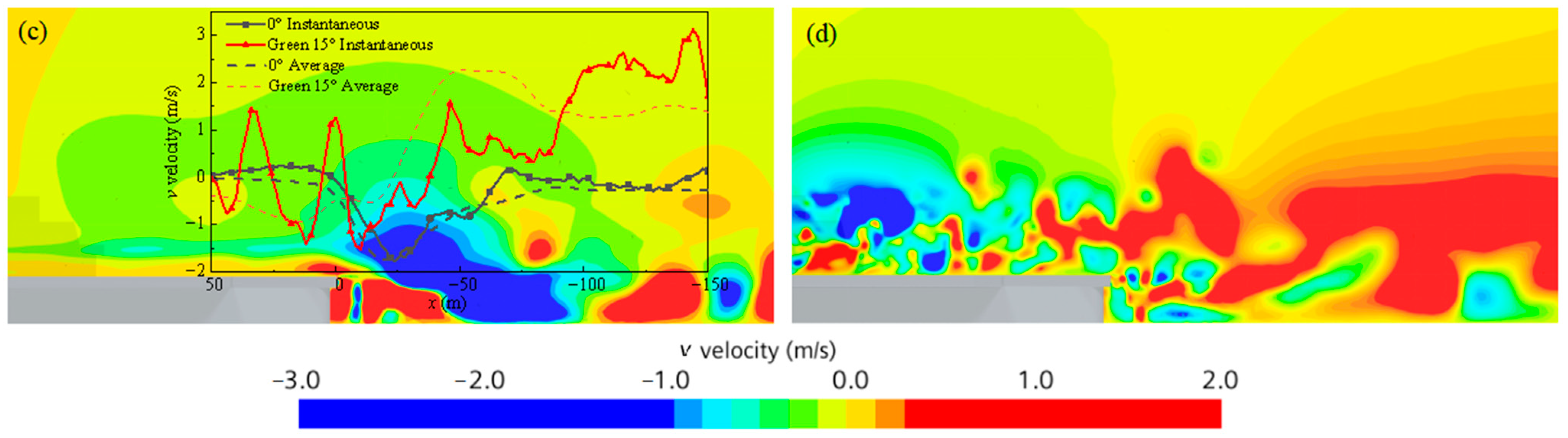
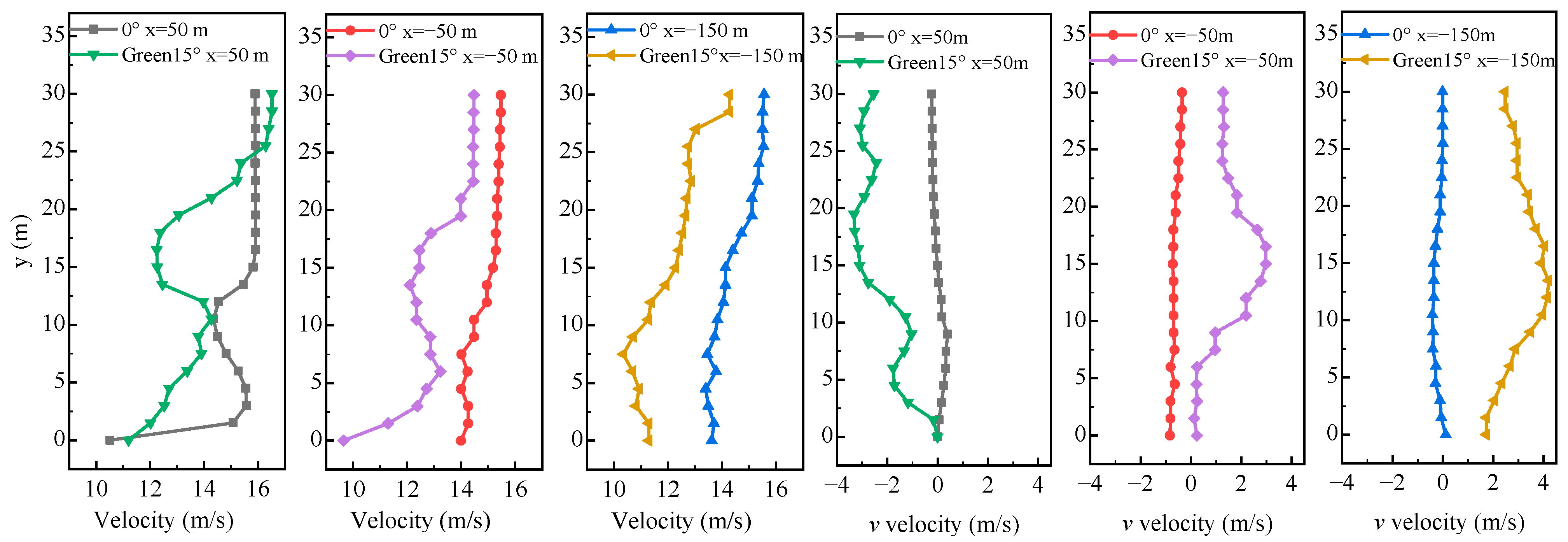
- A full-size simulation using the DDES method was carried out to predict the flow field of the aircraft carrier under stationary conditions. The airwake distribution showed an identical feature as that which appeared in the scaled-down model. The overall speed of the fall line decreased for the green 15° wind case while maintaining considerable fluctuations. The downwash area was reduced, but the upwash flow was more intense. When a carrier-based aircraft entered the transition zone between the upwash and downwash regions of the aircraft carrier’s wake, the lift of the aircraft decreased rapidly, posing a safety risk for landing.
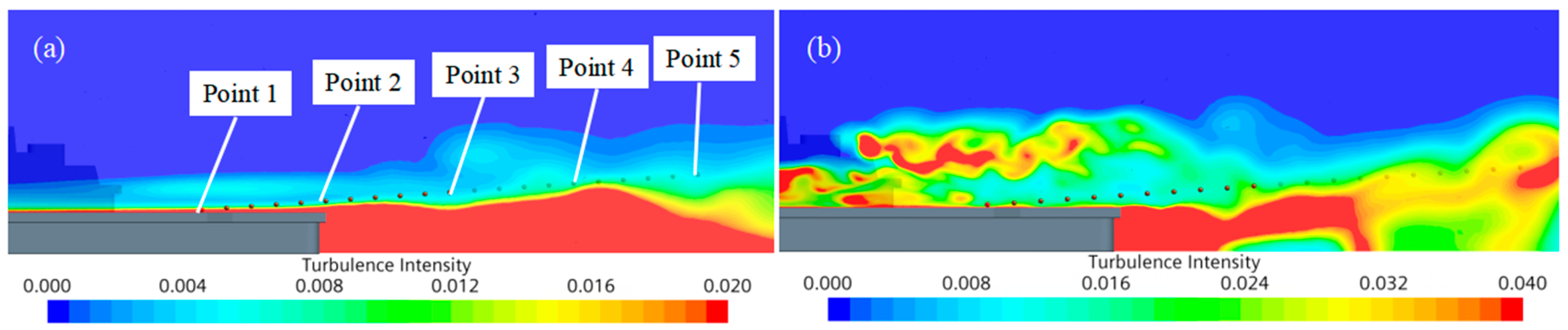
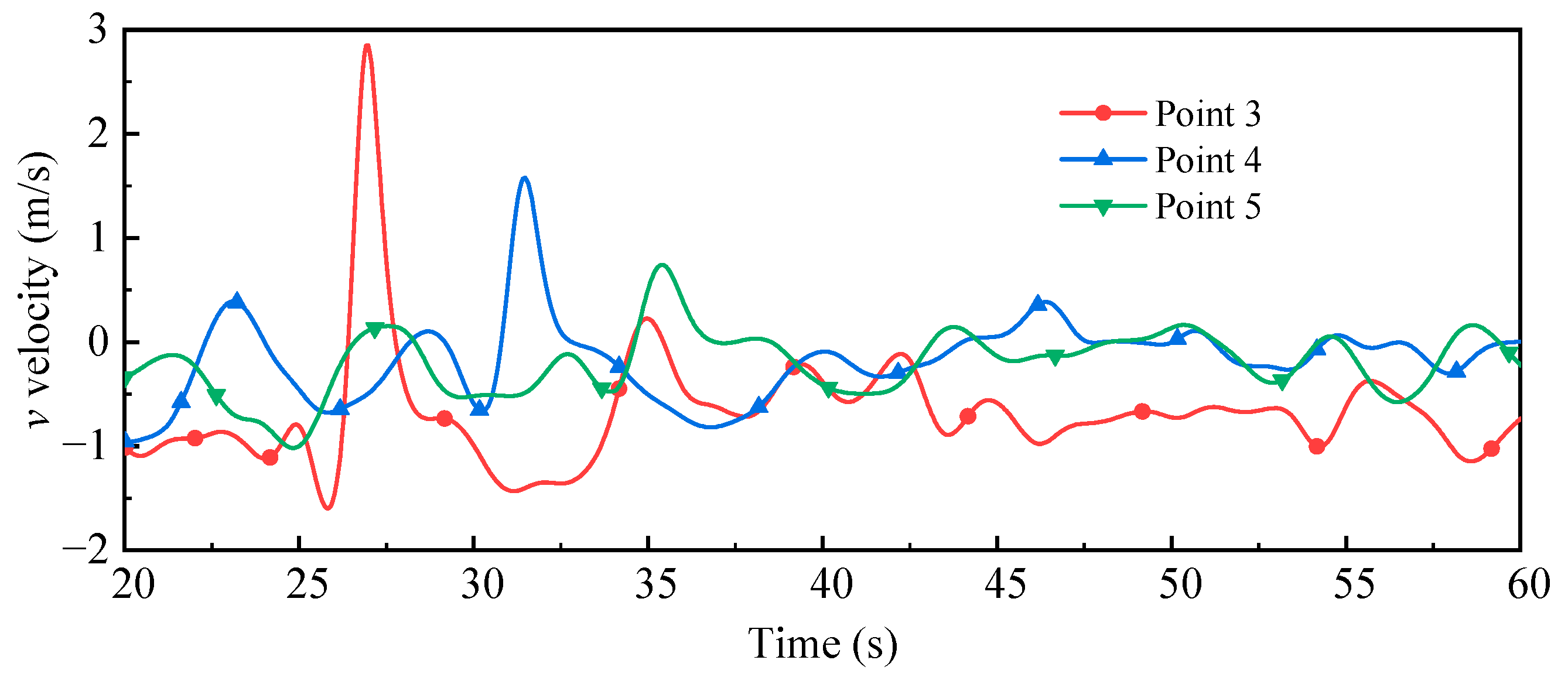
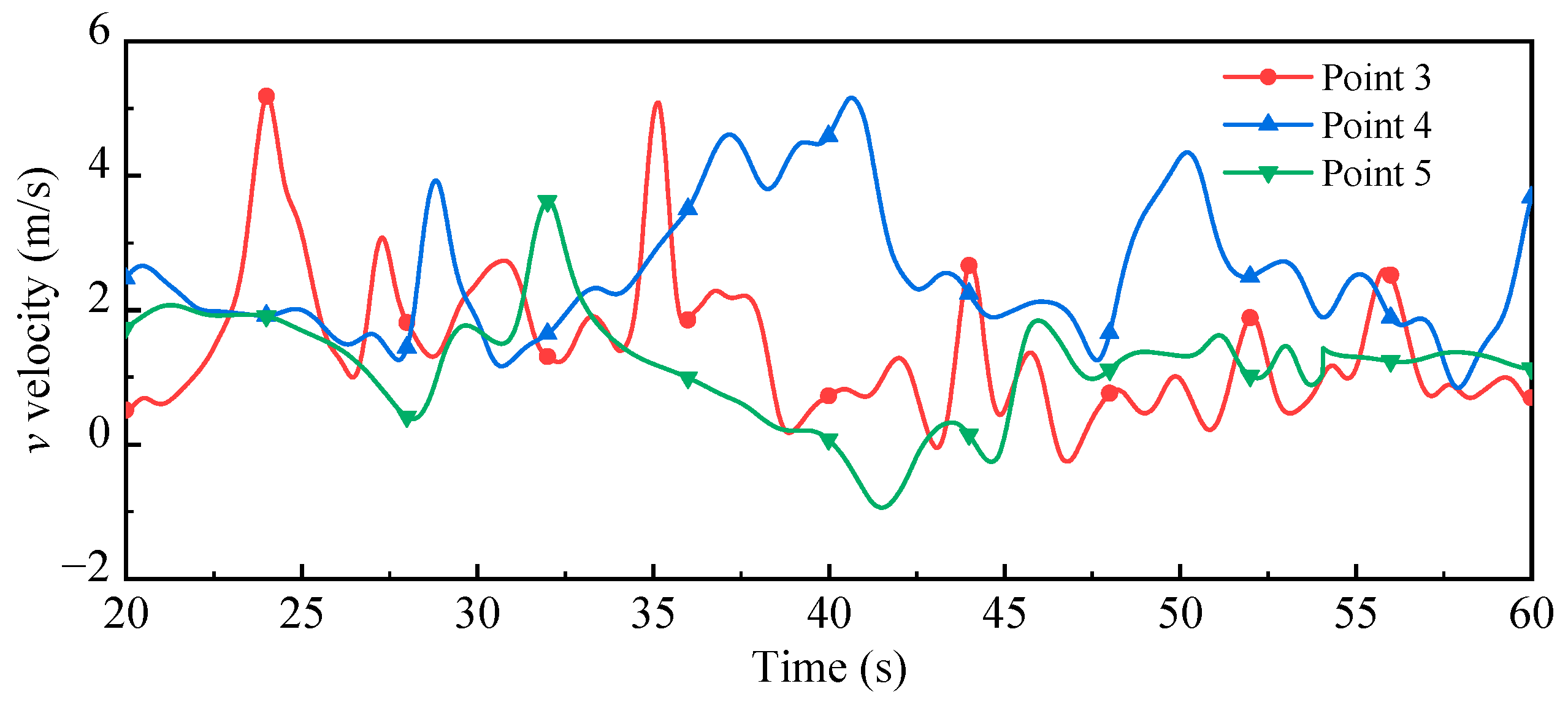
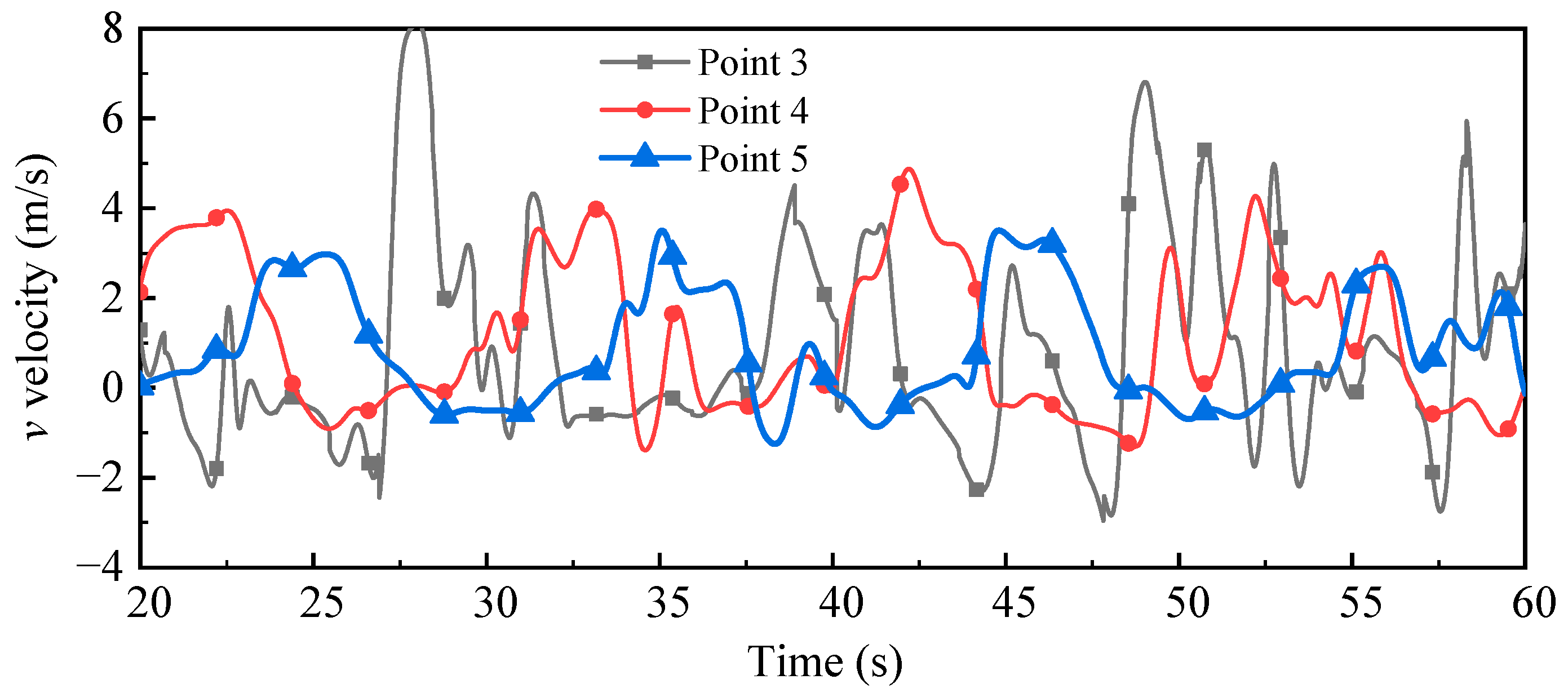
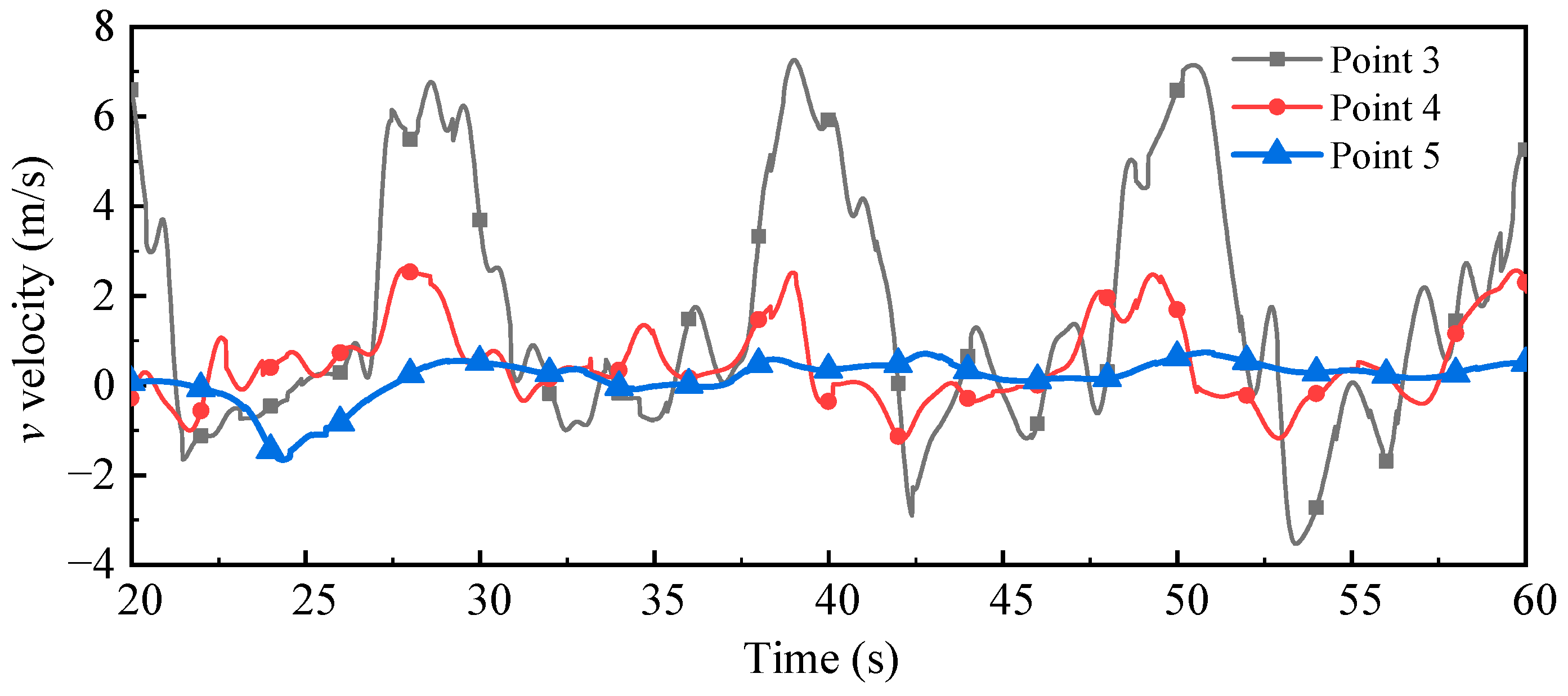
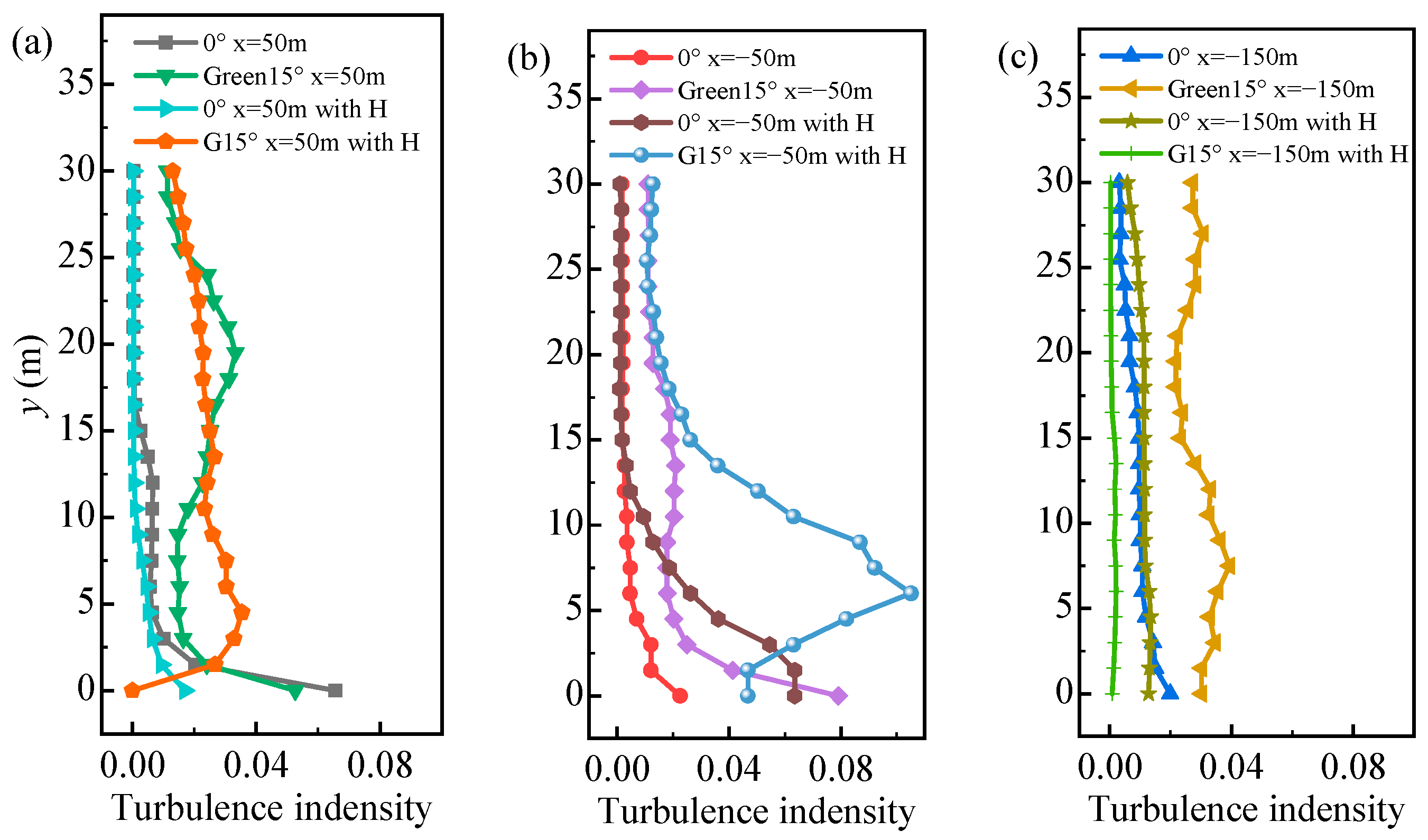
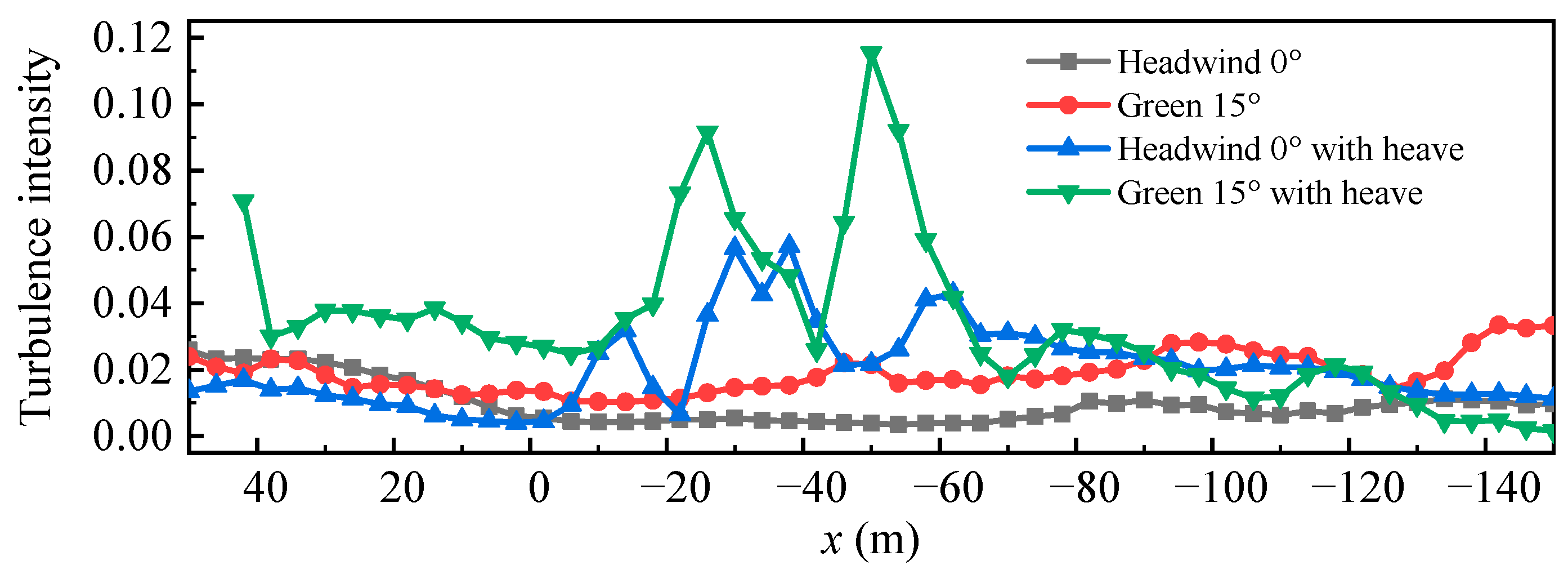
- The stern vortex distribution was investigated under swaying conditions. The airwake area was found to be increased with the swaying motion. The aft edge of the stern deck showed a periodic separation vortex. This phenomenon has not been observed behind the deck of a stationary hull. The periodicity and amplitude of the near-landing point intensified under the green 15° wind with heave. The effect of airwake diminished after 150 m. Compared to a stationary hull, heave motion under headwind conditions increased the vertical velocity component range at Point 3 by 144%, and by 66.7% under green 15° wind. With the hull heave conditions, the turbulence intensity along the approach line of the aircraft increased significantly, which was the critical area for the aircraft landing. The heave motion of the aircraft carrier increased the fluctuation of the wake, leading to greater fluctuations in aircraft lift, which was unfavorable for the control of the flight system and the pilot.
- It was found that the vertical velocity component contained more energy in the ship swaying state according to PSD analysis. Further, the signals at about 0.1–1 Hz over the approach line consisted of the most energy, which was induced by ship sway.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Forrest, J.S.; Kaaria, C.H.; Owen, I. Evaluating ship superstructure aerodynamics for maritime helicopter operations through CFD and flight simulation. Aeronaut. J. 2016, 120, 1578–1603. [Google Scholar] [CrossRef]
- Owen, I.; White, M.D.; Padfield, G.D.; Hodge, S.J. A virtual engineering approach to the ship-helicopter dynamic interface; a decade of modelling and simulation research at the university of liverpool. Aeronaut. J. 2017, 121, 1833–1857. [Google Scholar] [CrossRef]
- Reddy, K.R.; Toffoletto, R.; Jones, K. Numerical Simulation of Ship Airwake. Comput. Fluids 2000, 29, 451–465. [Google Scholar] [CrossRef]
- Zan, S.J. Surface Flow Topology for a Simple Frigate Shape. Can. Aeronaut. Space J. 2001, 47, 33–43. [Google Scholar]
- Mora, R.B. Flow field velocity on the flight deck of a frigate. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 228, 2674–2680. [Google Scholar] [CrossRef]
- Polsky, S.; Naylor, S. CVN Airwake Modeling and Integration: Initial Steps in the Creation and Implementation of a Virtual Burble for F-18 Carrier Landing Simulations. Synthese 2015, 66, 405–435. [Google Scholar]
- Shipman, J.; Arunajatesan, S.; Peter Cavallo, P.; Sinha, N.; Polsky, S. Dynamic CFD Simulation of Aircraft Recovery to an Aircraft Carrier. In Proceedings of the 26th AIAA Applied Aerodynamics Conference, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar] [CrossRef]
- Kelly, M.F.; White, M.; Owen, I. Using airwake simulation to inform flight trials for the Queen Elizabeth Class Carrier. In Proceedings of the INEC 2016, 13th International Naval Engineering Conference, Bristol, UK, 26–28 April 2016. [Google Scholar]
- Polsky, S. CFD Prediction of Airwake Flowfields for Ships Experiencing Beam Winds. In Proceedings of the 21st AIAA Applied Aerodynamics Conference, Orlando, FL, USA, 23–26 June 2003. [Google Scholar] [CrossRef]
- Zhang, J.; Minelli, G.; Rao, A.N.; Basara, B.; Bensow, R.; Krajnović, S. Comparison of PANS and LES of the flow past a generic ship. Ocean Eng. 2018, 165, 221–236. [Google Scholar] [CrossRef]
- Rahimpour, M.; Oshkai, P. Experimental investigation of airflow over the helicopter platform of a polar icebreaker. Ocean Eng. 2016, 121, 98–111. [Google Scholar] [CrossRef]
- Rosenfeld, N.; Kimmel, K.; Sydney, A.J. Investigation of Ship Topside Modeling Practices for Wind Tunnel Experiments. In Proceedings of the Aiaa Aerospace Sciences Meeting, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar] [CrossRef]
- Shukla, S.; Singh, S.N.; Sinha, S.S.; Vijayakumar, R. Comparative assessment of URANS, SAS and DES turbulence modeling in the predictions of massively separated ship airwake characteristics. Ocean. Eng. 2021, 229, 108954. [Google Scholar] [CrossRef]
- Shukla, S.; Sinha, S.S.; Singh, S.N. Ship-helo coupled airwake aerodynamics: A comprehensive review. Prog. Aerosp. Sci. 2019, 106, 71–107. [Google Scholar] [CrossRef]
- Spalart, P.R. Comments on the feasibility of LES for wings, and on a hybrid RANS/LES approach. In Proceedings of the First AFOSR International Conference on DNS/LES, Ruston, LA, USA, 4–8 August 1997. [Google Scholar]
- Spalart, P.R.; Deck, S.; Shur, M.L.; Squires, K.D.; Strelets, M.K.; Travin, A. A New Version of Detached-eddy Simulation, Resistant to Ambiguous Grid Densities. Theor. Comput. Fluid Dyn. 2006, 20, 181–195. [Google Scholar] [CrossRef]
- Spalart, P.R.; Squires, K.D. The Status of Detached-Eddy Simulation for Bluff Bodies; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Strelets, M. Detached eddy simulation of massively separated flows. In Proceedings of the 39th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2001. [Google Scholar] [CrossRef]
- Forrest, J.S.; Owen, I. An investigation of ship airwakes using Detached-Eddy Simulation. Comput. Fluids 2010, 39, 656–673. [Google Scholar] [CrossRef]
- Watson, N.A.; Kelly, M.F.; Owen, I.; Hodge, S.J.; White, M.D. Computational and experimental modelling study of the unsteady airflow over the aircraft carrier HMS Queen Elizabeth. Ocean Eng. 2019, 172, 562–574. [Google Scholar] [CrossRef]
- Owen, I.; Lee, R.; Wall, A.; Fernandez, N. The NATO generic destroyer-a shared geometry for collaborative research into modelling and simulation of shipboard helicopter launch and recovery. Ocean. Eng. 2021, 228, 108428. [Google Scholar] [CrossRef]
- Nisham, A.; Terziev, M.; Tezdogan, T.; Beard, T.; Incecik, A. Prediction of the aerodynamic behaviour of a full-scale naval ship in head waves using Detached Eddy Simulation. Ocean. Eng. 2021, 222, 108583. [Google Scholar] [CrossRef]
- Cadot, O. Experimental and numerical analysis of the bi-stable turbulent wake of a rectangular flat-backed bluff body. Phys. Fluids 2020, 32, 105111. [Google Scholar] [CrossRef]
- Kanninen, P.; Peltonen, P.; Vuorinen, V. Full-scale ship stern wave with the modelled and resolved turbulence including the hull roughness effect. Ocean. Eng. 2022, 245, 110434. [Google Scholar] [CrossRef]
- Boudreau, M.; Dumas, G.; Veilleux, J.C. Assessing the Ability of the DDES Turbulence Modeling Approach to Simulate the Wake of a Bluff Body. Aerospace 2017, 4, 41. [Google Scholar] [CrossRef]
- Yuan, W.; Wall, A.; Lee, R. Combined numerical and experimental simulations of unsteady ship airwakes. Comput. Fluids 2018, 172, 29–53. [Google Scholar] [CrossRef]
- Menter, F.R. Zonal Two Equation k-w Turbulence Models For Aerodynamic Flows. In Proceedings of the 23rd fluid Dynamics, Plasmadynamics, and Lasers Conference, Orlando, FL, USA, 6–9 July 1993; Volume 93. NASA STI/Recon Technical Report N. [Google Scholar] [CrossRef]
- Gritskevich, M.S.; Garbaruk, A.V.; Schütze, J.; Menter, F.R. Development of DDES and IDDES Formulations for the k-ω Shear Stress Transport Model. Flow Turbul. Combust. 2012, 88, 431–449. [Google Scholar] [CrossRef]
- Chesshire, G.; Henshaw, W.D. A Scheme for Conservative Interpolation on Overlapping Grids. SIAM J. Sci. Comput. 1994, 15, 819–845. [Google Scholar] [CrossRef]
- Hadzic, H. Development and Application of Finite Volume Method for the Computation of Flows around Moving Bodies on Unstructured, Overlapping Grids. Ph.D. Thesis, Technische Universität Harburg, Hamburg, Germany, 2006. [Google Scholar]
- Hunt, J.; Wray, A.A.; Moin, P. Eddies, streams, and convergence zones in turbulent flows. In Proceedings of the Studying Turbulence Using Numerical Simulation Databases, 2, 27 June–22 July 1988; pp. 193–208. Available online: https://ntrs.nasa.gov/citations/19890015184 (accessed on 2 August 2024).
- Zhang, J.; Minelli, G.; Basara, B.; Bensow, R.; Krajnović, S. Yaw effect on bi-stable air-wakes of a generic ship using large eddy simulation. Ocean. Eng. 2020, 219, 108164. [Google Scholar] [CrossRef]
- Greenwell, D.I.; Barrett, R.V. Inclined screens for control of ship air wakes. In Proceedings of the AIAA paper 2006-3502, 3rd AIAA Flow Control Conference, San Francisco, CA, USA, 5–8 June 2006. [Google Scholar]
- Healey, J.V. Establishing a database for flight in the wakes of structures. J. Aircraft. 1992, 29, 559–564. [Google Scholar] [CrossRef]
- Garratt, J.R. Review: The atmospheric boundary layer. Earth-Sci. Rev. 1994, 37, 89–134. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Li, B.; Ren, Z.; Tian, F. Numerical Simulation of the Unsteady Airwake of the Liaoning Carrier Based on the DDES Model Coupled with Overset Grid. J. Mar. Sci. Eng. 2024, 12, 1598. https://doi.org/10.3390/jmse12091598
Yang X, Li B, Ren Z, Tian F. Numerical Simulation of the Unsteady Airwake of the Liaoning Carrier Based on the DDES Model Coupled with Overset Grid. Journal of Marine Science and Engineering. 2024; 12(9):1598. https://doi.org/10.3390/jmse12091598
Chicago/Turabian StyleYang, Xiaoxi, Baokuan Li, Zhibo Ren, and Fangchao Tian. 2024. "Numerical Simulation of the Unsteady Airwake of the Liaoning Carrier Based on the DDES Model Coupled with Overset Grid" Journal of Marine Science and Engineering 12, no. 9: 1598. https://doi.org/10.3390/jmse12091598