3.1. Overview of Self-Powered Multifunctional Bracelet
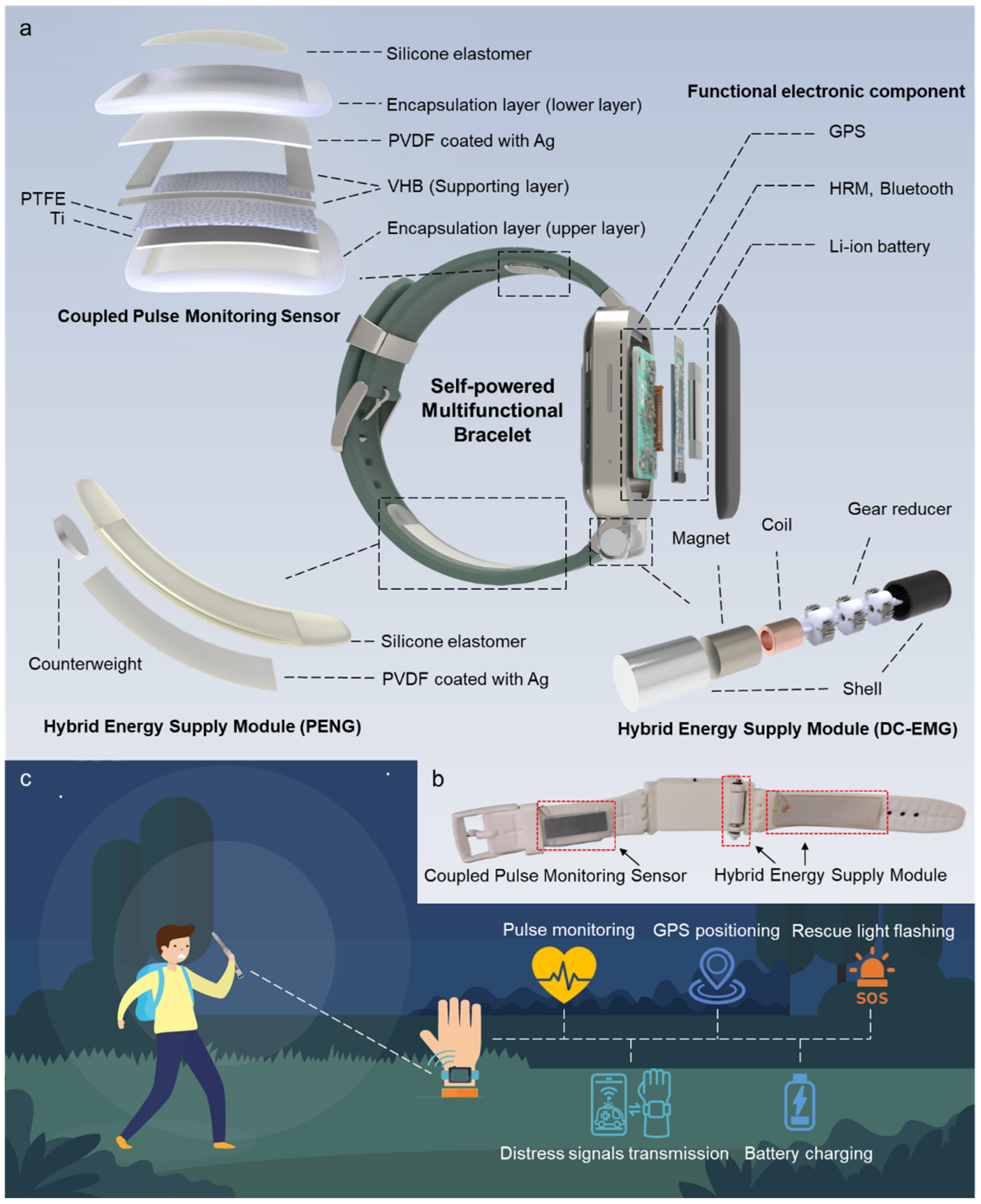
The self-powered multifunctional bracelet consists of two parts: the watch case and the watch strap. The watch strap includes a HESM composed of a EMG and PENG, and a CPMS based on the coupling of a TENG and PENG, while the watch case contains functional electronic components (
Figure 1a).
A direct-current electromagnetic generator (DC-EMG) of HESM and its auxiliary structures are located at the connection between the watch case and the watch strap. The DC-EMG module consists of a brushed electromagnetic generator and a three-stage gear reducer. In conjunction with the structural design of the connection between the watch case and the watch strap, the DC-EMG generates direct current during the periodic opening and closing motion of the two components. The direct current principle of DC-EMG will be discussed in detail in the following section. The PENG module in the HESM is located in the watch strap on the same side as the EMG module, 3 cm away from the connection between the watch strap and the watch case. During the swinging process of the watch strap, both the DC-EMG and PENG modules are driven to move together, serving as HESM. The photo of the SPMB is shown in
Figure 1b.
The CPMS is attached to the inner side of the watch strap, close to the pulse. The CPMS is composed of an encapsulation layer (upper layer), upper structural layer, support layer, lower structural layer, encapsulation layer (lower layer), and connecting layer. The upper and lower encapsulation layers are made of polytetrafluoroethylene (PTFE), the upper structural layer consists of a titanium sheet and PTFE, the lower structural layer is PVDF coated with Ag on both sides, and the connecting layer is made of silicone elastomer.
The SPMB can achieve pulse monitoring, GPS positioning, rescue light flashing, wireless signal transmission, and battery charging (
Figure 1c). CPMS collects pulse wave signals and converts them into electrical signals, which are processed by a heart rate monitoring module (HRM) and transmitted to the smartwatch or mobile phone via Bluetooth, realizing real-time monitoring of vital signs. The HESM is used to drive the GPS positioning system, Bluetooth module, and HRM. Meanwhile, the HESM can activate the distress signal light and charge the lithium-ion battery, catering to the long-term power and basic physiological signal monitoring requirements of outdoor workers or adventurers. In addition, due to the compact structural design, SPMB can easily be combined with commercial smart watches. In the future, through integration, when the wearer’s vital signs change, such as the wearer is in distress or in a dangerous state, it is possible to achieve the function of automatic distress signal transmission.
3.2. Principles and Characterization of DC-EMG and PENG Module of HESM
The EMG shell of the DC-EMG module is fixed to the edge of the watch case, while the torque shaft of the generator is rigidly connected to the inner ring of an overrunning clutch, which is in turn fixed to the outer shell of the watch (
Figure 2a). After fixing the outer ring of the overrunning clutch, the inner ring can rotate with low resistance in one direction while self-locking in the other direction (
Figure S1). In one of the directions of rotation, the inner and outer rings of the overrunning clutch rely on the rollers to engage each other to transmit torque. Since the outer ring and the watch case are fixed to each other, a self-locking effect is achieved. In another direction of rotation, the rollers between the inner ring and the outer ring are forced to compress the spring inside the overrunning clutch, so that the inner ring and the outer ring are separated from each other to realize the separation of motion.
When the watch strap is rotated 90° relative to the outer end of the watch case (
Figure 2a (ii)), the frame of the EMG rotates with the watch strap, while the EMG shaft remains stationary due to the tendency of the overrunning clutch to self-lock in this direction, causing the EMG frame to rotate relative to the EMG shaft for one-quarter cycle and generating an electric current. When the watch strap is rotated 90° in the opposite direction, as shown in
Figure 2a (iii), the EMG frame rotates in the opposite direction by 90°, while the shaft can rotate with minimal resistance in this direction due to the overrunning clutch, causing no relative rotation between the frame and shaft, and thus no electrical output from the generator. This process repeats itself in the next cycle of movement, as the watch strap rotates in the positive direction to reach the position of
Figure 2a (iv), generating an electrical current in the same direction as in
Figure 2a (ii). When the watch strap continues to rotate in the opposite direction, it returns to state (i). Thus, when the watch strap is shaken relative to the watch case, only a unidirectional electrical output is produced.
There are two reasons why we decided to introduce an overrunning clutch instead of directly fixing the shaft to the watch case. On the one hand, it avoids the introduction of a rectifier bridge, reduces the volume of the HESM, and can also reduce the decrease in the electromagnetic voltage, making the output voltage just enough to provide DC power to some electrical devices. In addition, reducing the wiring part of the rectifier bridge also enables the DC-EMG module to work normally under some harsh conditions, with higher robustness. On the other hand, when the strap swings at a high frequency, the gear reducer and EMG shaft can maintain unidirectional movement, avoiding damage to the internal multi-stage gear reducers caused by multiple direction changes. Moreover, after the introduction of an overrunning clutch, the minimum torque required for the strap to start swinging is also reduced, making it easy to swing.
The EMG tail frame is placed in the hole inside the watch case, but they are not directly connected. The inner hole of the watch case is equivalent to a radial bearing, and when combined with the watch case connected by the outer ring of the overrunning clutch, it can restrain the DC-EMG module from twisting in the other two axial directions, increasing the stability and durability of the EMG. After the combination of the EMG and the reducer, the diameter is only 6 mm, and the total length is 18.8 mm. By replacing the unused outer shell structure and hinge part of the watch with the DC-EMG module, the module’s compact design does not increase the volume of the watch itself.
The working principle of the PENG module of the HESM is shown in
Figure 2b. When the watch strap is shaken, the PENG on the surface of the strap is bent and deformed, which creates a potential difference between the upper and lower surfaces of the PVDF. This potential difference generates an electric current under an external load. As a result, when the watch strap is shaken, the PVDF undergoes periodic bending in both directions, creating an alternating current.
The DC-EMG module of HESM was explored and optimized for tip mass, rotation angle, and frequency. It was found that adding a small counterweight at the end of the strap can increase the output voltage by PENG, and the highest output voltage was obtained when the counterweight was 2.25 g (
Figure 2c). This is because increasing the weight lowers the natural frequency of the watch strap, making it more compatible with the normal swing frequency of the human hand. However, further increasing the weight has little effect on increasing the voltage output and strains the strength of the structure of the DC-EMG module. When the watch strap rotates at an angle of 90°, the voltage is at its highest (
Figure 2d). This is because the initial angular acceleration of the swing of the strap is the same and, as the angle increases, the deflection of the PVDF will increase. The energy transferred to the strap is mostly converted into elastic potential energy rather than rotational kinetic energy. On the other hand, smaller angles of movement limit the maximum relative rotational speed. The normal frequency of the swing or flicking of a watch strap by the human body is between 1 and 2 Hz. We performed characterization near this frequency range (
Figure 2e). We found that increasing the frequency beyond 1.9 Hz has a minor effect on the increase in voltage peak value, and too fast a swing of the watch strap consumes more energy from the human body. Therefore, we chose a frequency of 1.9 Hz for the remaining characterization, which is close to the normal frequency of the swing of a watch strap by hand. We performed electromagnetic field simulations on the DC-EMG module, and
Figure 2f shows the magnetic flux density distribution of the coil inside the electromagnetic generator. The magnetic flux density change over a period is shown in
Figure S2. By calculating the magnetic flux density change, we obtained the voltage curve corresponding to the actual EMG data (
Figure S3).
The PENG module of HESM is also explored and optimized for the weight, length, and thickness of PVDF. Tests showed that a slightly higher weight contributed to an increase in the piezoelectric voltage and current, and therefore we optimized the weight of the counterweight to 2.25 g (
Figure 2g). Moreover, we characterized the electrical output of PVDF materials with different lengths at the same width, and we found that both voltage and current can be greatly improved with an increase in PVDF length (
Figure 2h). In addition, we performed voltage and current characterizations on PVDF with thicknesses of 28 μm, 56 μm, and 110 μm. We found that as film thickness decreases, the voltage decreases slightly, whereas the current can increase substantially. The current of a PENG with a thickness of 28 μm can reach 41.29 μA, while that of a PENG with a thickness of 56 μm is only 14.32 μA. For the energy supply module of a PENG’s wearable or portable electronic devices, the voltage output generated by a PENG is often large enough, while the current is often too small to drive numerous electrical devices. Therefore, we selected a length of 6 cm and thickness of 28 μm for subsequent characterization. By analyzing the motion of the PVDF material on the watch strap through simulation (
Figure 2j), we obtained piezoelectric voltages that were consistent with the actual outputs. The output of the piezoelectric material during one cycle is shown in
Figures S4 and S5.
After optimizing the DC-EMG and PENG modules in the HESM, we obtained data on the optimized open-circuit voltage, short-circuit current, and transferred charge, and characterized the impedance matching of the DC-EMG and PENG modules (
Figure 2k–r). The voltage and current of the DC-EMG module were approximately 3.1 V and 86 mA, respectively, with a half-cycle average transferred charge of 10.5 mC. The DC-EMG module reached a peak power of 43.8 mW at a 33 Ω load. The voltage and current of the PENG module were approximately 67 V and 36 μA, respectively, with a half-cycle average transferred charge of 0.15 μC. The EMG module reached a peak power of 180 μW at a 400 kΩ load. Electromagnetic generators have low voltage, high current, and are suitable for low resistance load, while piezoelectric generators have high voltage, low current, and are suitable for high resistance load. In addition, we performed durability characterizations on the DC-EMG and PENG. When the mass of the counterweight is 2.25 g and the swing frequency of the strap is 1.9 Hz, the output of the DC-EMG and PENG have undergone minimal change after 50,000 cycles (
Figures S6 and S7).
3.3. Characterization of HESM
Since both the DC-EMG and PENG modules can convert mechanical energy from the swinging motion of the watch strap into electrical energy, we combined the advantages of the two modules to drive devices with different threshold voltage and load power, thereby expanding the practical application range of a HESM.
Herein, we characterized the output performance of a HESM after hybridizing the two modules. Both the DC-EMG and PENG modules utilize a servo motor to drive the watch case to rotate with a coupling, which in turn drives the swinging of the watch strap (
Figure 3a,b). This motion is similar to the way a person normally grips the watch case to swing the watch strap.
Figure 3c shows the circuit diagram for charging the lithium-ion battery or supplying power to the electrical device by DC-EMG and PENG modules. The DC-EMG module is connected to a boost module, which is consisted of an inductor, a chip-controlled automatic switch, a diode, and a small capacitor. The boost module converts the voltage from DC-EMG into a stable 5 V output, which is ideal for supplying power to the lithium-ion battery. Meanwhile, the PENG module is connected to the rectifier bridge and then connected to the lithium-ion battery.
The HESM was characterized according to the circuit diagram of
Figure S8. The positive electrode of the DC-EMG was connected to a diode, and the PENG passed through a rectifier bridge, then the two modules were connected in parallel. The open-circuit voltage and short-circuit current of HESM were approximately 69 V and 87 mA, respectively, with an average transferred charge of 10.5 mC per half cycle of motion (
Figure 3d–f). It exhibited the traits of high voltage of a PENG and high current of an EMG, and marginally enhances the output of a DC-EMG and PENG alone. We compared the charging curves of a DC-EMG, PENG, and HESM for a 33 μF capacitor and found that the HESM had better charging performance (
Figure 3g). During the first few seconds of charging, the DC-EMG module was mainly responsible for increasing the capacitor voltage, which quickly rose to around 3.7 V. However, since the maximum output voltage of the DC-EMG was around 3.7 V, the voltage could not be increased any further and the charging curve became stable. On the other hand, although the charging speed of the PENG module was slower, it could continuously charge the capacitor to a higher voltage. The HESM combined the advantages of these two modules, utilizing the DC-EMG to rapidly increase the capacitor voltage to 3.6 V, after which the PENG dominated the charge effect, and charged the capacitor to 9.6 V at 200 s. We also characterized the charging performance for a 1 F capacitor (
Figure S9). After about 500 s, the DC-EMG charged the capacitor to 1.28 V, the PENG charged it to 0.08 V, and the HESM charged it to 1.78 V. We further characterized the charging performance of the HESM for capacitors of different capacitance and found that the HESM could charge a 1.5 F capacitor to 1.14 V in 200 s (
Figure 3h). Finally, we employed the circuit depicted in
Figure 3c to charge a 30 mAh commercial lithium-ion battery. (
Figure 3i). The depleted battery could be charged from 2.35 V to 3.35 V in 1000 s, demonstrating the charging capability of the HESM for emergency power supply.
3.4. Principle and Characterization of CPMS
The electric signal generated by a CPMS is based on the coupling of the TENG and PENG principles, with the electrical output of CPMS being the forward superposition of the TENG and PENG outputs. TENGs and PENGs are both methods of converting mechanical energy into electrical energy. A TENG utilizes the frictional electrification of materials, and relies on the variation of distance between electrodes and dielectric materials to produce a capacitance change, resulting in the generation of an electric potential difference due to electrostatic induction, while a PENG utilizes the change in electric dipole moment caused by the structural deformation of asymmetric crystals under external stress, resulting in the generation of opposite charges on the surface of piezoelectric materials and the formation of a potential difference.
The working principle of a CPMS is shown in
Figure 4a. When the upper layer of the CPMS, consisting of Ti and PTFE, undergoes compression and rebound caused by a pulse wave, it generates a negative charge on the surface of PTFE. In the state shown in
Figure 4a (i), the distance between PTFE and the two Ag electrode layers is much greater than the distance between the two electrode layers, so the capacitance between PTFE and the two Ag electrode layers is approximately equal. Due to electrostatic induction, in the short-circuit state, the upper and lower Ag electrode layers carry the same amount of positive charge, and the total charge of both electrodes is equal to the surface charge on PTFE.
As the pulse pressure increases (
Figure 4a (ii)), the PTFE moves closer to the lower structure layer, and the capacitance between the PTFE and the upper Ag electrode layer increases dramatically. As a result, electrons from the upper silver electrode layer are transferred to the lower silver electrode layer due to the potential difference. When the pulse pressure continues to increase (
Figure 4a (iii)), the PTFE makes contact with the upper Ag electrode layer and squeezes the PVDF, resulting in an infinite capacitance between the upper Ag electrode layer and the PTFE. Due to the electrostatic induction principle of the TENG, all negative charges move to the lower surface of the PVDF. Meanwhile, according to the piezoelectric principle, the potential of the lower Ag electrode layer is higher than that of the upper Ag electrode layer due to the compression of the PVDF. It causes all negative charges to move to the lower surface of the PVDF, resulting in the superposition of the TENG and PENG outputs. When the pulse pressure decreases (
Figure 4a (iv)), the PTFE separates from the upper Ag electrode layer, and the potential difference on the PVDF surface gradually disappears. The capacitance between the PTFE and the upper layer Ag electrode decreases, causing a large amount of negative charge to move to the upper Ag electrode layer. When the pulse pressure returns to the initial state, the device returns to state (i).
A TENG is more sensitive to displacement changes, while a PENG is more sensitive to changes in strain or stress. The coupling of the TENG and PENG enables the CPMS to monitor changes in the direction of displacement of the pulse wave and also to monitor apparent changes in the pressure wave generated by the pulse wave. Therefore, the CPMS can realize the sensitive monitoring of pulse wave signals. The pulse wave signals contain important health information about the human body, such as arterial stiffness, heart rhythm, and cardiovascular disease risk [
41]. From the result of the simulation of the electric field by COMSOL, it can be observed that when the upper and lower structure layers are far apart, the potential between the two electrode layers is approximately equal (
Figure 4b). When they approach together, the potential difference between the two Ag electrode layers is maximized.
Figure 4c,d shows the CPMS and its position on the watch strap. The dark gray layer with metallic luster in the photo is the Ti metal layer, which is in contact with the skin after encapsulation. The upper structural layer is composed of a Ti sheet as a hard elastic substrate, which can transmit the pulse wave in the skin to the CPMS more sensitively and convert it into a real-time pressure wave. Then the pressure drives the contact-separation and squeeze deformation of the PTFE in the upper structural layer and the PVDF in the lower structural layer. The middle support layer is composed of four VHB double-sided adhesive tapes, with two tapes placed on each side between the upper and lower structural layers for support and connection. The other two VHB tapes are placed outside the gaps on the other two sides of the structural layer to provide more external support to the intermediate movable part between the upper and lower structural layers during encapsulation, to prevent the CPMS from being flattened and causing output reduction. Moreover, due to the increased volume of air inside, more space for deformation is left for the CPMS. In addition, the CPMS can be well fixed to the strap after encapsulation. This is because the two VHBs outside the structural layer provide more constraints to the CPMS, forming a statically indeterminate structure. A statically indeterminate structure is a mechanical structure with redundant constraints. Additional redundant constraints can bring about more generalized forces than a simple statically determinate structure. When the statically indeterminate structure is subjected to external forces of different directions and magnitudes, the redundant constraints can be adaptively deformed according to the geometric structure, material elastic modulus, and the positional relationship of the constraints, resulting in smaller deformations and displacements of the structure. Therefore, the statically indeterminate structural design allows the wearer to maintain a relative stillness between the CPMS and the watch strap during movement.
The thickness of the supporting layer and the length of the structural layer were explored and optimized. We found that the pulse signal from the CPMS was strongest when the supporting layer between the upper and lower structural layers was 0.8 mm thick (
Figure S10). In addition, while keeping the width of the structural layer constant, the influence of the length of the structural layer on the pulse signal strength was explored (
Figure S11). The results indicate that when the length of the structural layer is 3 cm, the pulse signal is strongest. Finally, under the impact load of 5 N, 100,000 fatigue test experiments were carried out on the CPMS, and the output voltage was kept at about 25 V, and the voltage hardly changed during the whole process. It can be seen that the CPMS has high stability (
Figure S12).
The CPMS exhibits a good force–voltage linear relationship within a relatively large force range (
Figure 4e). After encapsulation, when the CPMS is directly bonded to the strap without using silicone elastomer, the open-circuit voltage, short-circuit current, and short-circuit transfer charge obtained during pulse monitoring while the wearer is sitting still are 0.15 V, 1.17 nA, and 0.11 nC, respectively (
Figure 4g–i). When the CPMS is bonded to the strap using silicone elastomer, the open-circuit voltage, short-circuit current, and transferred charge are increased to 0.38 V, 6.44 nA, and 0.40 nC, respectively. The electrical output is greatly improved because the silicone elastomer can fill the natural arches and minor wrinkles between the CPMS and the watch strap, reducing the pre-tension of adhesion. When the pulse wave drives the motion of the CPMS, there is more deformation space available for the PVDF of the lower structural layer. In this way, the CPMS can generate greater strain and displacement under the same pulse pressure. Therefore, the introduction of silicone elastomer can significantly improve the pulse signal of the CPMS.
3.5. Demonstration of the Applications of SPMB
The proposed SPMB consists of the CPMS, HESM, and functional electronic components, enabling the real-time wireless transmission of pulse signal and position information, and illumination of the distress signal light in emergencies.
Figure 5a shows the flow diagram of the SPMB for personal rescue. The HESM collects energy and charges the lithium-ion battery for storage. The lithium battery provides power to the HRM module, GPS positioning module, and Bluetooth module. The HRM processes the pulse wave signal collected by the CPMS, and sends it to the mobile phone by Bluetooth. Meanwhile, the GPS positioning module receives the latitude and longitude information and sends them to the mobile phone via another Bluetooth module. In the future, through integration with the commercial smartwatch, it is possible that, when the wearer’s wave changes dramatically, the mobile phone will send the pulse and location information to request help.
Figure 5b shows the photo of the functional electronic elements inside the watch case.
Figure 5c shows the real-time monitoring of the pulse wave signal by the SPMB. The pulse signals were wirelessly transmitted via the Bluetooth module inside the watch case to a computer for display. The stable pulse information was demonstrated when the wearer’s arm is still, swinging slowly, and swinging rapidly (
Supplementary Video S1).
Figure 5d–f shows the pulse signals collected by the SPMB when the wearer is in a static, walking, and running state, respectively. The SPMB can achieve stable pulse monitoring in different motion states, demonstrating anti-interference and stability.
Figure 5g shows the charging and discharging curve of a 30 mAh lithium-ion battery by the SPMB while simultaneously driving the GPS module and Bluetooth module. During a cold start, the GPS module is in its maximum power consumption state.
Figure 5h–i show the latitude and longitude information obtained by the GPS module in the watch case, which is transmitted to the mobile phone for display through the Bluetooth module. In addition, the SPMB can light up the light strip and rescue light when the watch strap is swung (
Supplementary Videos S2 and S3), achieving illumination and distress signal flashing.

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




