Ensemble of Deep Convolutional Neural Networks for Automatic Pavement Crack Detection and Measurement


 ,
, 
Abstract
:1. Introduction
- Minimal Path Methods: the principle of this approach is to suppose that minimal paths in the image correspond to road cracks. Kaul et al., in [18], proposed a new algorithm to detect crack curve with unknown endpoints and topology based on minimal path. Nguyen et al., in [19], applied the Free-From Anisotropy to address brightness and connectivity issues in the cracks. Amhaz et al., in [20], considered the local and global level to choose endpoints and minimal path for crack detection, using two-dimensional pavement images.
- Machine Learning: Recently, many algorithms have been proposed to detect cracks based on machine learning. A support vector machine (SVM) was employed to detect aircraft skin cracks [21]. Oliveira and Correia, in [22], proposed an unsupervised learning algorithm named CrackIT to detect cracks. After that, they developed research to extend their work to the CrackIT toolbox [23]. A new descriptor with a random structure forests algorithm has been proposed to describe crack and non-crack pixels [24]. Due to overlay depending on feature descriptors and complex road conditions, it is difficult for operators to inspect road cracks.
- Deep Learning: For multi-class classification tasks, deep learning has presented a better performance than traditional algorithms. Moreover, many distress detection issues adopted the deep learning to inspect and recognize cracks. Cha et al. used the convolutional neural networks (CNN) and Faster-RCNN to detect road cracks [25,26]. In CrackNet [27], the proposed CNN without pooling layers was used to inspect cracks and improve accuracy. In CrackNet-R [28], Zhang et al. proposed a Gated Recurrent Multilayer Perception (GRMLP), which was embedded into the CNN to perform automated pavement crack detection. A structured prediction method with CNN was proposed to inspect cracks pixels [29]. Yang et al. in [30] adopted the Fully Convolutional Network (FCN) to perform automated road crack detection and measurement.
- We propose an ensemble network based on probability fusion for automated pavement crack detection and measurement.
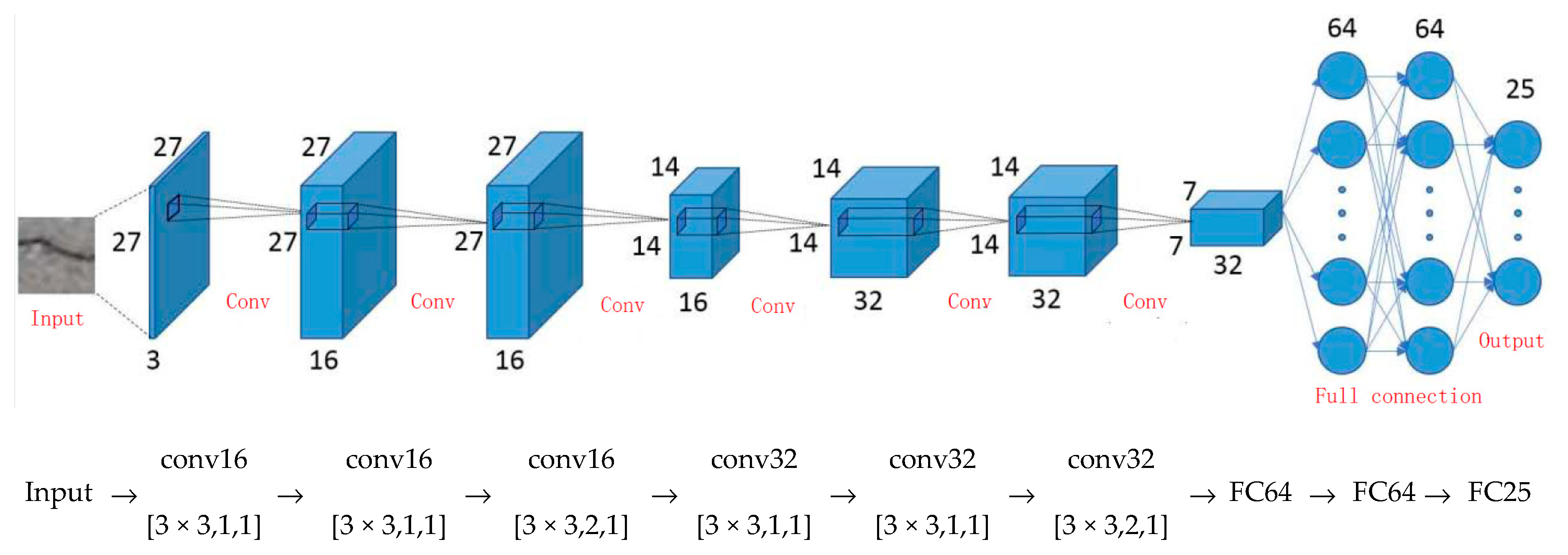
- The structured predicted method was embedded into individual CNNs for an ensemble network. The designed individual CNNs can improve the accuracy of crack detection by discarding the pooling layers.
- The designed ensemble neural network model was employed to obtain a satisfactory accuracy for crack detection.
- The crack width and length can be measured based on the predicted crack maps.
2. Methods
2.1. Convolutional Neural Networks
2.2. Structured Prediction Method
2.3. Ensemble Network Learning Method
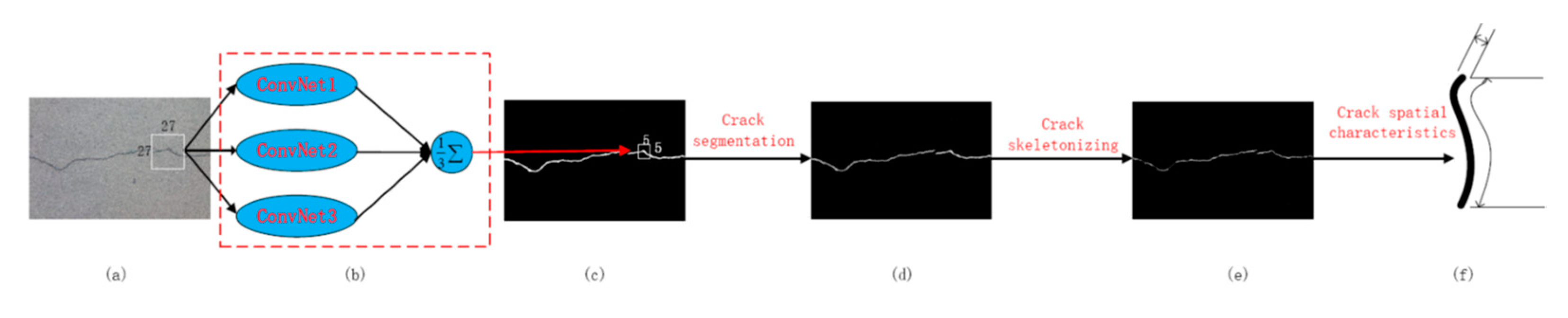
2.4. Crack Measurement
2.4.1. Crack Segmentation
2.4.2. Crack Skeleton
3. Experimental Results
3.1. Training and Testing
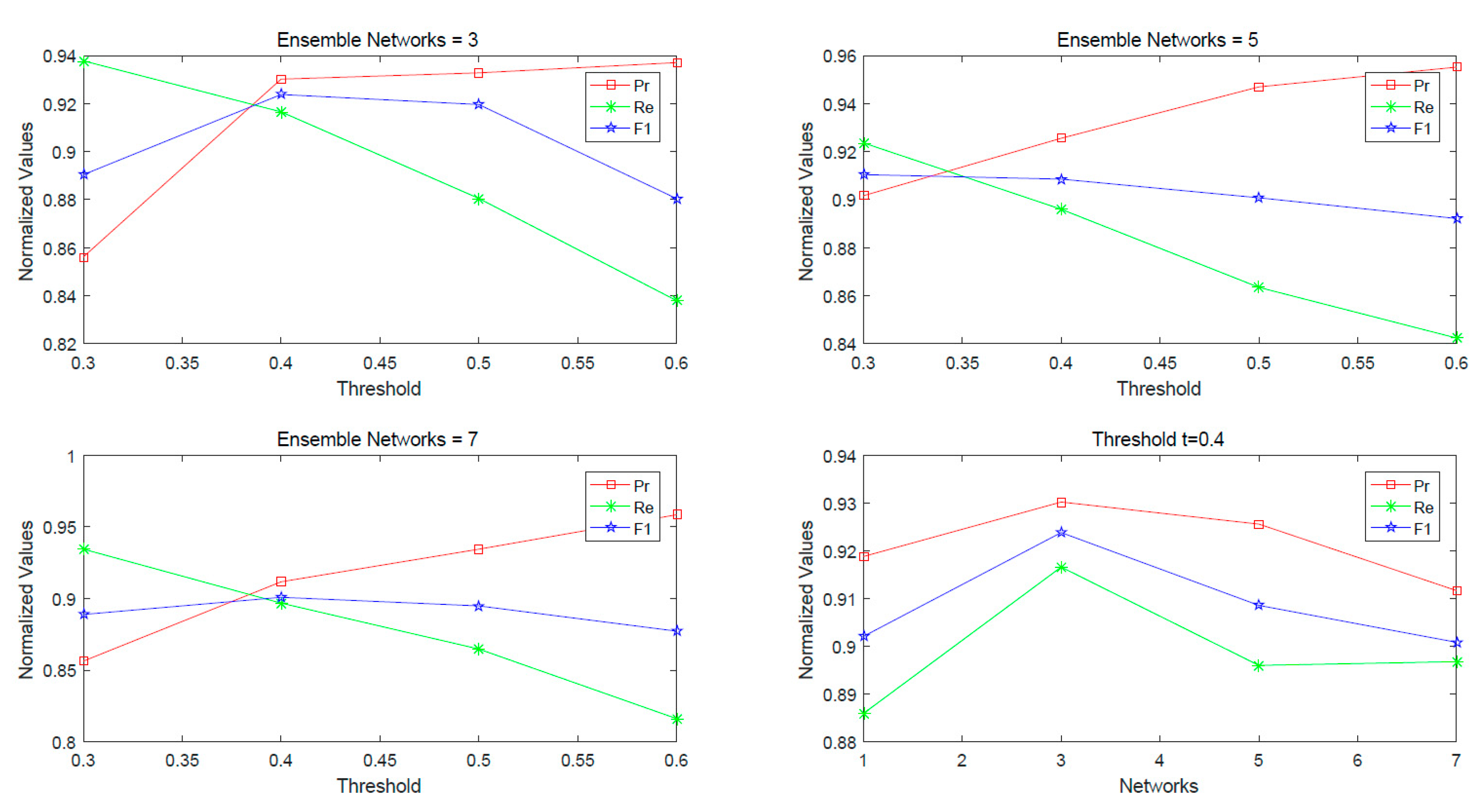
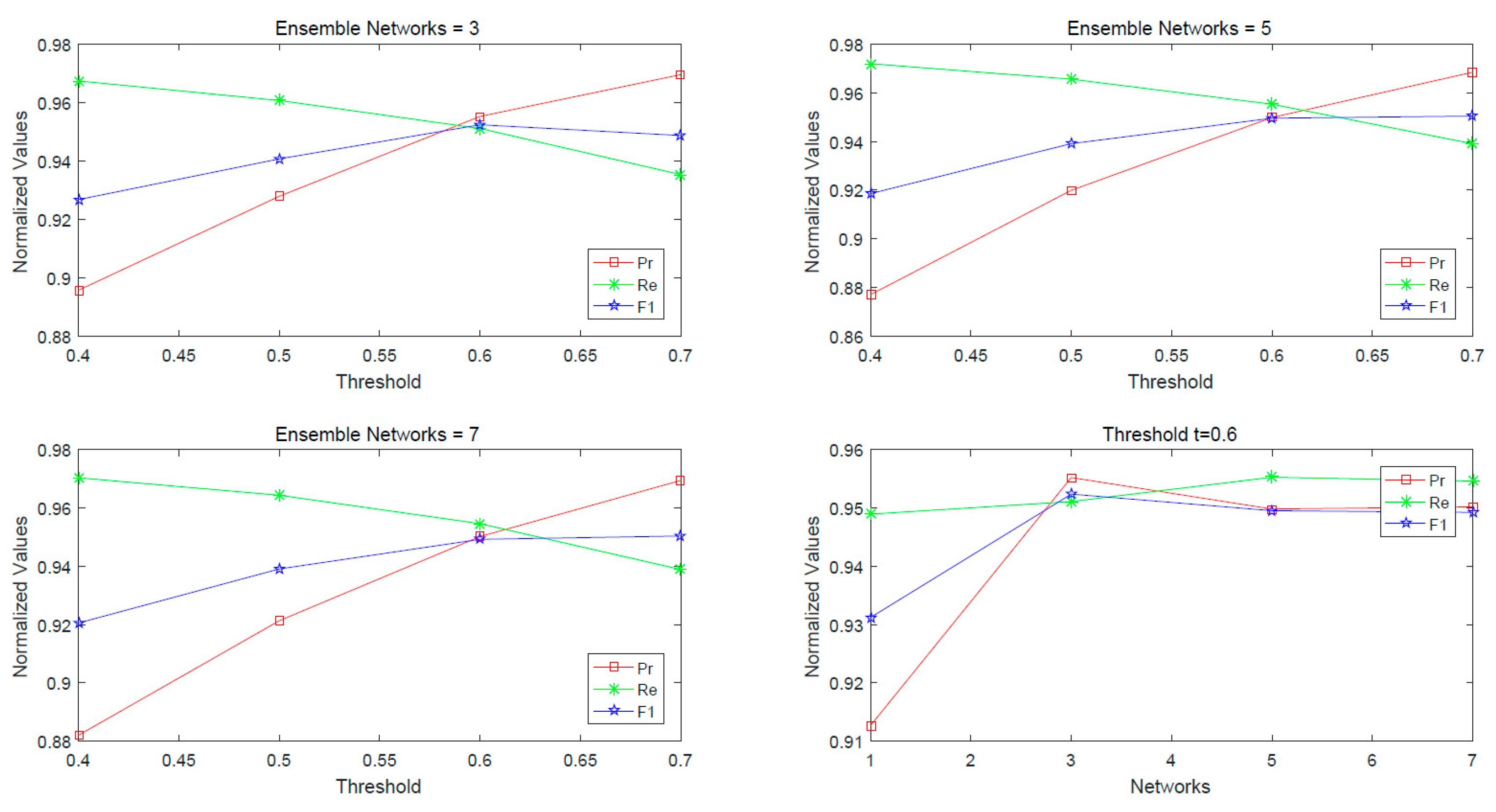
3.2. Ensemble Network
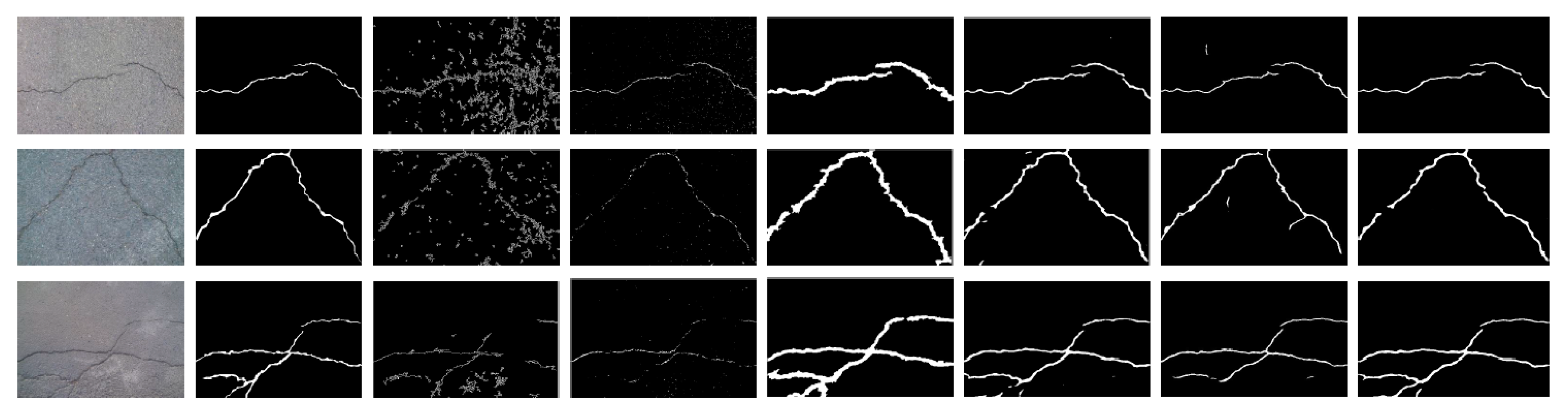
3.3. Results on CFD
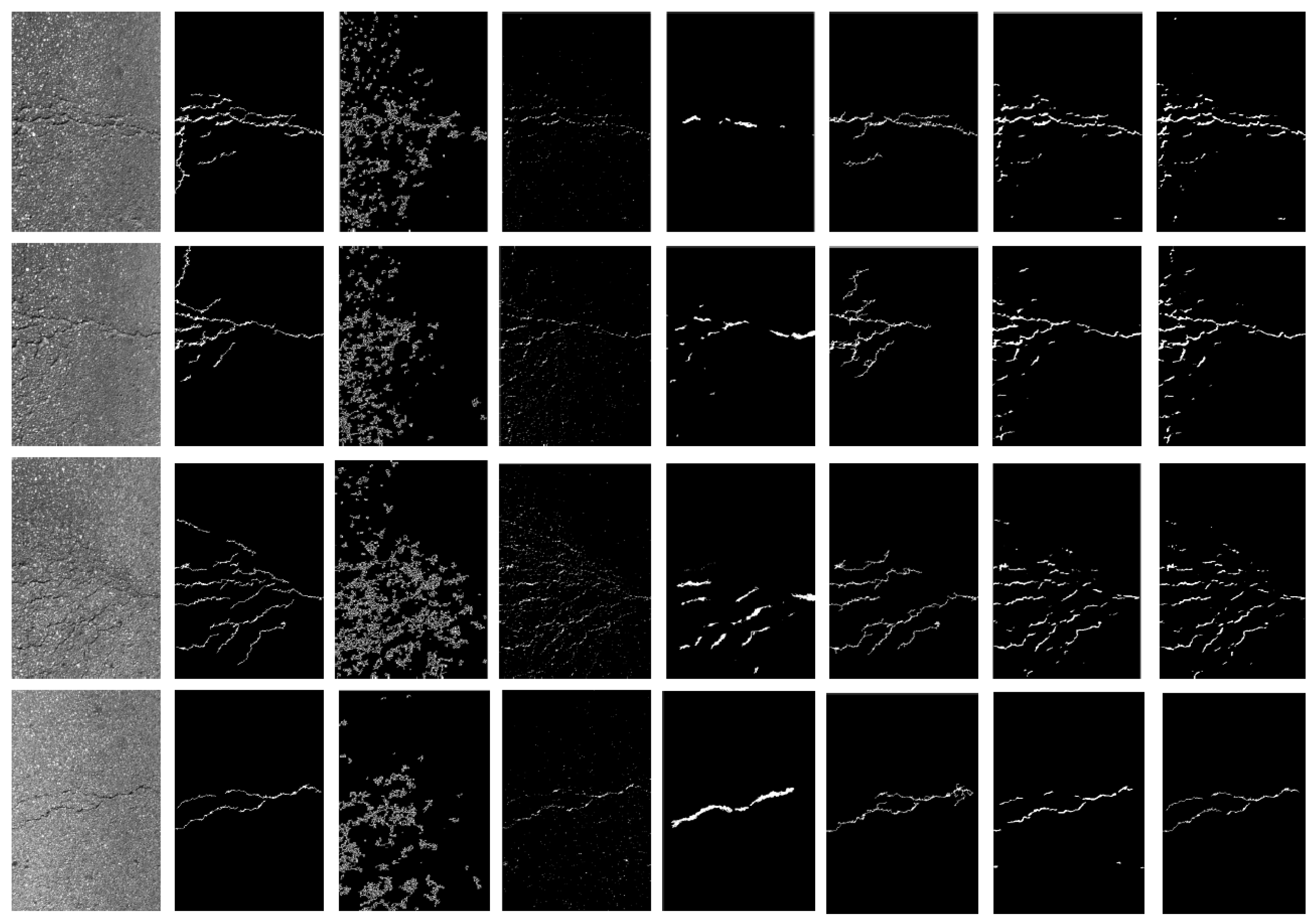
3.4. Results on AigleRN
3.5. Measurements
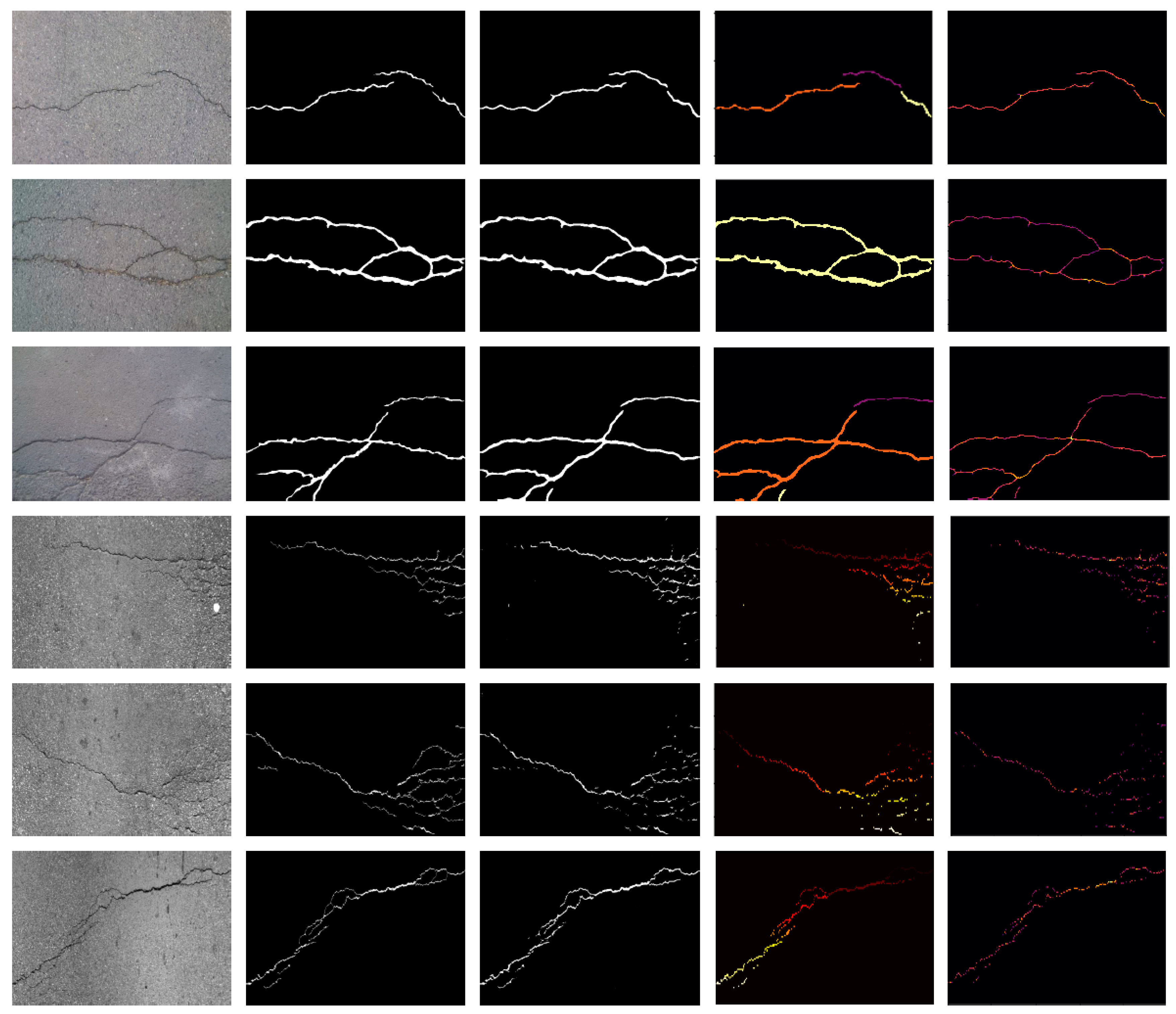
3.5.1. Crack Segmentation and Skeleton
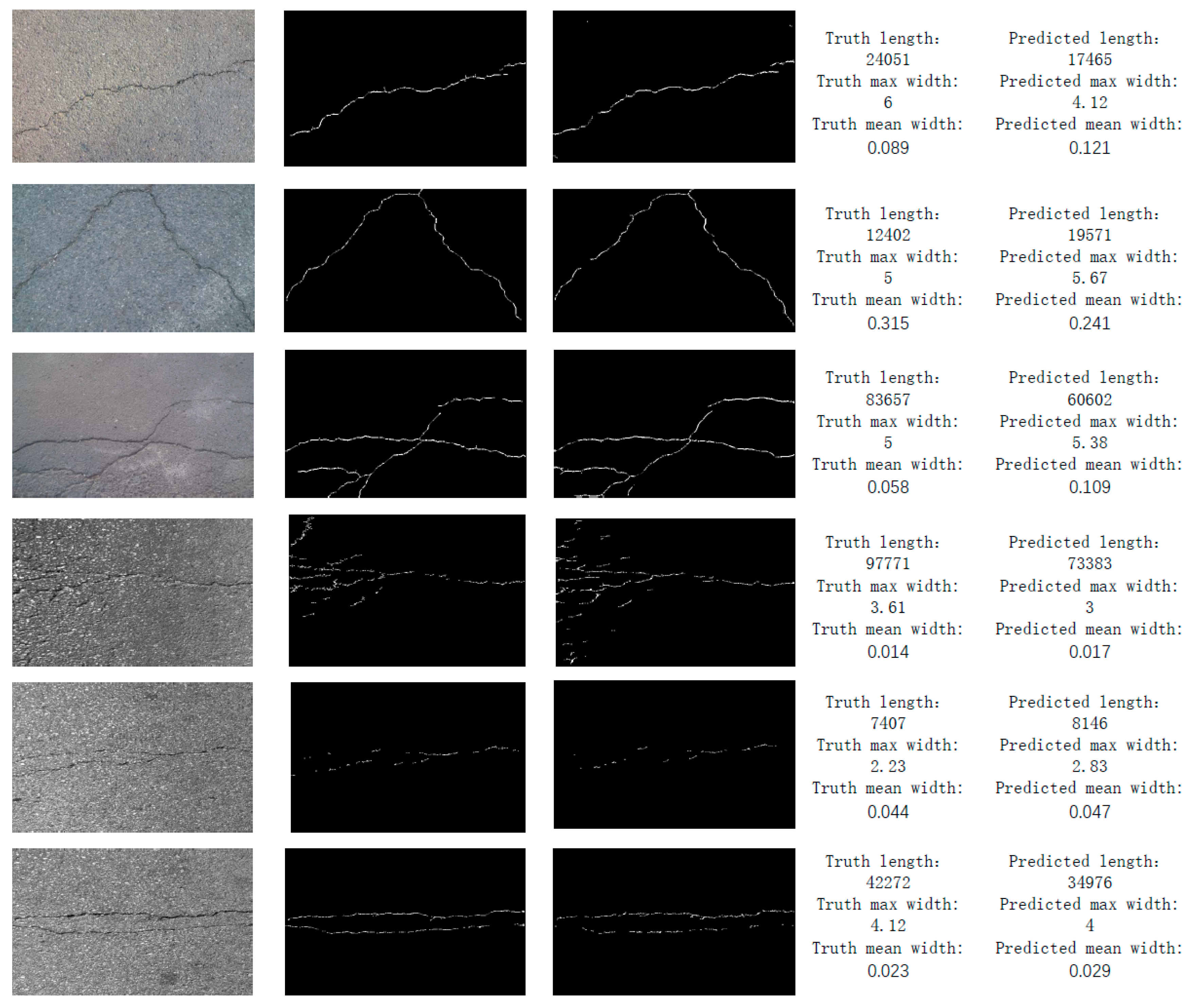
3.5.2. Crack Measurements
4. Conclusions
- We will explore end-to-end deep learning to create an automatic crack detection system.
- To date, many algorithms have detected cracks based on individual images. Therefore, we will explore the detection of cracks in video streaming.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bazzaz, M.; Darabi, M.K.; Little, D.N.; Garg, N. Effect of Evotherm-M1 on Properties of Asphaltic Materials Used at NAPMRC Testing Facility. J. Test. Eval. 2020, in press. [Google Scholar] [CrossRef]
- Zou, Q.; Zhang, Z.; Li, Q.; Qi, X.; Wang, Q.; Wang, S. DeepCrack: Learning hierarchical convolutional features for crack detection. IEEE Trans. Image Process. 2019, 28, 1498–1512. [Google Scholar] [CrossRef] [PubMed]
- Pantuso, A.; Loprencipe, G.; Bonin, G.; Teltayev, B.B. Analysis of pavement condition survey data for effective implementation of a network level pavement management program for Kazakhstan. Sustainability 2019, 11, 901. [Google Scholar] [CrossRef] [Green Version]
- Di Mascio, P.; Loprencipe, G.; Moretti, L. Technical and economic criteria to select pavement surfaces of port handling plants. Coatings 2019, 9, 126. [Google Scholar] [CrossRef] [Green Version]
- Loprencipe, G.; Zoccali, P. Ride quality due to road surface irregularities: Comparison of different methods applied on a set of real road profiles. Coatings 2017, 7, 59. [Google Scholar] [CrossRef] [Green Version]
- Bonin, G.; Polizzotti, S.; Loprencipe, G.; Folino, N.; Oliviero Rossi, C.; Teltayev, B.B. Development of a road asset management system in Kazakhstan. In Proceedings of the AIIT International Congress on Transport Infrastructure and Systems, TIS 2017, Rome, Italy, 10–12 April 2017; CRC Press/Balkema: Leiden, The Netherlands, 2017; pp. 537–545, ISBN 9781138030091. [Google Scholar]
- Zakeri, H.; Nejad, F.M.; Fahimifar, A. Image Based Techniques for Crack Detection, Classification and Quantification in Asphalt Pavement: A Review. Arch. Comput. Methods Eng. 2017, 24, 935–977. [Google Scholar] [CrossRef]
- Loprencipe, G.; Pantuso, A. A specified procedure for distress identification and assessment for urban road surfaces based on PCI. Coatings 2017, 7, 65. [Google Scholar] [CrossRef] [Green Version]
- Loprencipe, G.; Cantisani, G. Evaluation methods for improving surface geometry of concrete floors: A case study. Case Stud. Struct. Eng. 2015, 4, 14–25. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.; German, S.; Brilakis, I. Visual retrieval of concrete crack properties for automated post-earthquake structural safety evaluation. Autom. Constr. 2011, 20, 874–883. [Google Scholar] [CrossRef]
- Oh, J.K.; Jang, G.; Oh, S.; Lee, J.H.; Yi, B.J.; Moon, Y.S.; Lee, J.S.; Choi, Y. Bridge inspection robot system with machine vision. Autom. Constr. 2009, 18, 929–941. [Google Scholar] [CrossRef]
- Oliveira, H.; Correia, P.L. Automatic road crack segmentation using entropy and image dynamic thresholding. In Proceedings of the 17th European Signal Processing Conference, Glasgow, Scotland, UK, 24–28 August 2009; pp. 622–626. [Google Scholar]
- Zhao, H.; Qin, G.; Wang, X. Improvement of canny algorithm based on pavement edge detection. In Proceedings of the 2010 3rd International Congress on Image and Signal Processing, CISP 2010, Yantai, China, 16–18 October 2010; Volume 2, pp. 964–967. [Google Scholar]
- Attoh-Okine, N.; Ayenu-Prah, A. Evaluating pavement cracks with bidimensional empirical mode decomposition. EURASIP J. Adv. Signal Process. 2008, 2008, 1–7. [Google Scholar]
- Tanaka, N.; Uematsu, K. A Crack Detection Method in Road Surface Images Using Morphology. In Proceedings of the Workshop on Machine Vision Applications, Chiba, Japan, 17–19 November 1998; Volume 98, pp. 1–4. [Google Scholar]
- Tang, J.; Gu, Y. Automatic crack detection and segmetnation using a hybrid algorithm for road distress analysis. In Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics, SMC 2013, Manchester, UK, 13–16 October 2013; pp. 3026–3030. [Google Scholar]
- Subirats, P.; Dumoulin, J.; Legeay, V.; Barba, D. Automation of pavement surface crack detection using the continuous wavelet transform. In Proceedings of the International Conference on Image Processing, ICIP 2006, Atlanta, GA, USA, 8–11 October 2006; pp. 3037–3040. [Google Scholar]
- Kaul, V.; Yezzi, A.; Tsai, Y.J. Detecting curves with unknown endpoints and arbitrary topology using minimal paths. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1952–1965. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, T.S.; Begot, S.; Duculty, F.; Avila, M. Free-form anisotropy: A new method for crack detection on pavement surface images. In Proceedings of the International Conference on Image Processing, ICIP 2011, Brussels, Belgium, 11–14 September 2011; pp. 1069–1072. [Google Scholar]
- Amhaz, R.; Chambon, S.; Idier, J.; Baltazart, V. Automatic Crack Detection on Two-Dimensional Pavement Images: An Algorithm Based on Minimal Path Selection. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2718–2729. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Wang, X.; Zhou, X.; Li, Z. The Aircraft Skin Crack Inspection Based on Different-Source Sensors and Support Vector Machines. J. Nondestruct. Eval. 2016, 35, 46. [Google Scholar] [CrossRef]
- Oliveira, H.; Correia, P.L. Automatic road crack detection and characterization. IEEE Trans. Intell. Transp. Syst. 2013, 14, 155–168. [Google Scholar] [CrossRef]
- Oliveira, H.; Correia, P.L. CrackIT—An image processing toolbox for crack detection and characterization. In Proceedings of the 2014 IEEE International Conference on Image Processing, ICIP 2014, Paris, France, 27–30 October 2014; pp. 798–802. [Google Scholar]
- Shi, Y.; Cui, L.; Qi, Z.; Meng, F.; Chen, Z. Automatic road crack detection using random structured forests. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3434–3445. [Google Scholar] [CrossRef]
- Cha, Y.J.; Choi, W.; Büyüköztürk, O. Deep Learning-Based Crack Damage Detection Using Convolutional Neural Networks. Comput. Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Cha, Y.J.; Choi, W.; Suh, G.; Mahmoudkhani, S.; Büyüköztürk, O. Autonomous Structural Visual Inspection Using Region-Based Deep Learning for Detecting Multiple Damage Types. Comput. Civ. Infrastruct. Eng. 2018, 33, 731–747. [Google Scholar] [CrossRef]
- Zhang, A.; Wang, K.C.P.; Li, B.; Yang, E.; Dai, X.; Peng, Y.; Fei, Y.; Liu, Y.; Li, J.Q.; Chen, C. Automated Pixel-Level Pavement Crack Detection on 3D Asphalt Surfaces Using a Deep-Learning Network. Comput. Civ. Infrastruct. Eng. 2017, 32, 805–819. [Google Scholar] [CrossRef]
- Zhang, A.; Wang, K.C.P.; Fei, Y.; Liu, Y.; Chen, C.; Yang, G.; Li, J.Q.; Yang, E.; Qiu, S. Automated Pixel-Level Pavement Crack Detection on 3D Asphalt Surfaces with a Recurrent Neural Network. Comput. Civ. Infrastruct. Eng. 2019, 34, 213–229. [Google Scholar] [CrossRef]
- Fan, Z.; Wu, Y.; Lu, J.; Li, W. Automatic Pavement Crack Detection Based on Structured Prediction with the Convolutional Neural Network. arXiv 2018, arXiv:1802. [Google Scholar]
- Yang, X.; Li, H.; Yu, Y.; Luo, X.; Huang, T.; Yang, X. Automatic Pixel-Level Crack Detection and Measurement Using Fully Convolutional Network. Comput. Civ. Infrastruct. Eng. 2018, 33, 1090–1109. [Google Scholar] [CrossRef]
- Kumar, A.; Kim, J.; Lyndon, D.; Fulham, M.; Feng, D. An Ensemble of Fine-Tuned Convolutional Neural Networks for Medical Image Classification. IEEE J. Biomed. Health Inform. 2017, 21, 31–40. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wen, G.; Hou, Z.; Li, H.; Li, D.; Jiang, L.; Xun, E. Ensemble of Deep Neural Networks with Probability-Based Fusion for Facial Expression Recognition. Cognit. Comput. 2017, 9, 597–610. [Google Scholar] [CrossRef]
- Maji, D.; Santara, A.; Mitra, P.; Sheet, D. Ensemble of Deep Convolutional Neural Networks for Learning to Detect Retinal Vessels in Fundus Images. arXiv 2016, arXiv:1603. [Google Scholar]
- Lee, T.C.; Kashyap, R.L.; Chu, C.N. Building Skeleton Models via 3-D Medial Surface Axis Thinning Algorithms. CVGIP Gr. Models Image Process. 1994, 56, 462–478. [Google Scholar] [CrossRef]
- Hilditch, C. Comparison of thinning algorithms on a parallel processor. Image Vis. Comput. 1983, 1, 115–132. [Google Scholar] [CrossRef]
- Wu, L.; Mokhtari, S.; Nazef, A.; Nam, B.; Yun, H.-B. Improvement of Crack-Detection Accuracy Using a Novel Crack Defragmentation Technique in Image-Based Road Assessment. J. Comput. Civ. Eng. 2016, 30, 04014118. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016; ISBN 9780262337373. [Google Scholar]
- Nair, V.; Hinton, G.E. Rectified linear units improve Restricted Boltzmann machines. In Proceedings of the ICML 2010 Proceeding 27th International Conference on Machine Learning, Haifa, Israel, 21–24 June 2010; pp. 807–814. [Google Scholar]
- Nam, J.; Kim, J.; Loza Mencía, E.; Gurevych, I.; Fürnkranz, J. Large-scale multi-label text classification—Revisiting neural networks. In Proceedings of the Joint European Conference on Machine Learning and Knowledge Discovery in Databases (ECML PKDD 2014), Nancy, France, 15–19 September 2014; Springer: Berlin/Heidelberg, Germany, 2014; Volume 8725, pp. 437–452. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015—Conference Track Proceedings, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Springenberg, J.T.; Dosovitskiy, A.; Brox, T.; Riedmiller, M. Striving for simplicity: The all convolutional net. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015—Workshop Track Proceedings, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Dietterich, T.G. Ensemble methods in machine learning. In Proceedings of the First International Workshop, Multiple Classifier Systems 2000, Cagliari, Italy, 21–23 June 2000; Springer: Berlin/Heidelberg, Germany, 2000; Volume 1857, pp. 1–15. [Google Scholar]
- Chambon, S.; Moliard, J.M. Automatic road pavement assessment with image processing: Review and comparison. Int. J. Geophys. 2011, 2011, 989354. [Google Scholar] [CrossRef] [Green Version]
- Ai, D.; Jiang, G.; Siew Kei, L.; Li, C. Automatic Pixel-Level Pavement Crack Detection Using Information of Multi-Scale Neighborhoods. IEEE Access 2018, 6, 24452–24463. [Google Scholar] [CrossRef]
- Konig, J.; David Jenkins, M.; Barrie, P.; Mannion, M.; Morison, G. A Convolutional Neural Network for Pavement Surface Crack Segmentation Using Residual Connections and Attention Gating. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Taipei, Taiwan, 22–29 September 2019; pp. 1460–1464. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the 18th International Conference on Medical Image Computing and Computer Assisted Intervention 2015, Munich, Germany, 5–9 October 2015; Springer: Berlin/Heidelberg, Germany, 2015; Volume 9351, pp. 234–241. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pr | Re | F1 | |
|---|---|---|---|
| Canny [13] | 0.4377 | 0.7307 | 0.457 |
| Local thresholding [12] | 0.7727 | 0.8274 | 0.7418 |
| CrackForest [24] | 0.7466 | 0.9514 | 0.8318 |
| U-net [47] | 0.9254 | 0.8951 | 0.899 |
| Structured prediction [29] | 0.9119 | 0.9481 | 0.9244 |
| Structured prediction without pooling | 0.9227 | 0.9489 | 0.9312 |
| Ensemble network | 0.9552 | 0.9521 | 0.9533 |
| Pr | Re | F1 | |
|---|---|---|---|
| Canny [13] | 0.1989 | 0.6753 | 0.2881 |
| Local thresholding [12] | 0.5329 | 0.9345 | 0.667 |
| FFA [19] | 0.7688 | 0.6812 | 0.6817 |
| MPS [18] | 0.8263 | 0.841 | 0.8195 |
| Structured prediction [29] | 0.9178 | 0.8812 | 0.8954 |
| Structured prediction without pooling | 0.9188 | 0.8861 | 0.9021 |
| Ensemble network | 0.9302 | 0.9166 | 0.9238 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Z.; Li, C.; Chen, Y.; Mascio, P.D.; Chen, X.; Zhu, G.; Loprencipe, G. Ensemble of Deep Convolutional Neural Networks for Automatic Pavement Crack Detection and Measurement. Coatings 2020, 10, 152. https://doi.org/10.3390/coatings10020152
Fan Z, Li C, Chen Y, Mascio PD, Chen X, Zhu G, Loprencipe G. Ensemble of Deep Convolutional Neural Networks for Automatic Pavement Crack Detection and Measurement. Coatings. 2020; 10(2):152. https://doi.org/10.3390/coatings10020152
Chicago/Turabian StyleFan, Zhun, Chong Li, Ying Chen, Paola Di Mascio, Xiaopeng Chen, Guijie Zhu, and Giuseppe Loprencipe. 2020. "Ensemble of Deep Convolutional Neural Networks for Automatic Pavement Crack Detection and Measurement" Coatings 10, no. 2: 152. https://doi.org/10.3390/coatings10020152
APA StyleFan, Z., Li, C., Chen, Y., Mascio, P. D., Chen, X., Zhu, G., & Loprencipe, G. (2020). Ensemble of Deep Convolutional Neural Networks for Automatic Pavement Crack Detection and Measurement. Coatings, 10(2), 152. https://doi.org/10.3390/coatings10020152