
Reconfigurable Intelligent Surface-Based Backscatter Communication for Data Transmission


Abstract
:1. Introduction
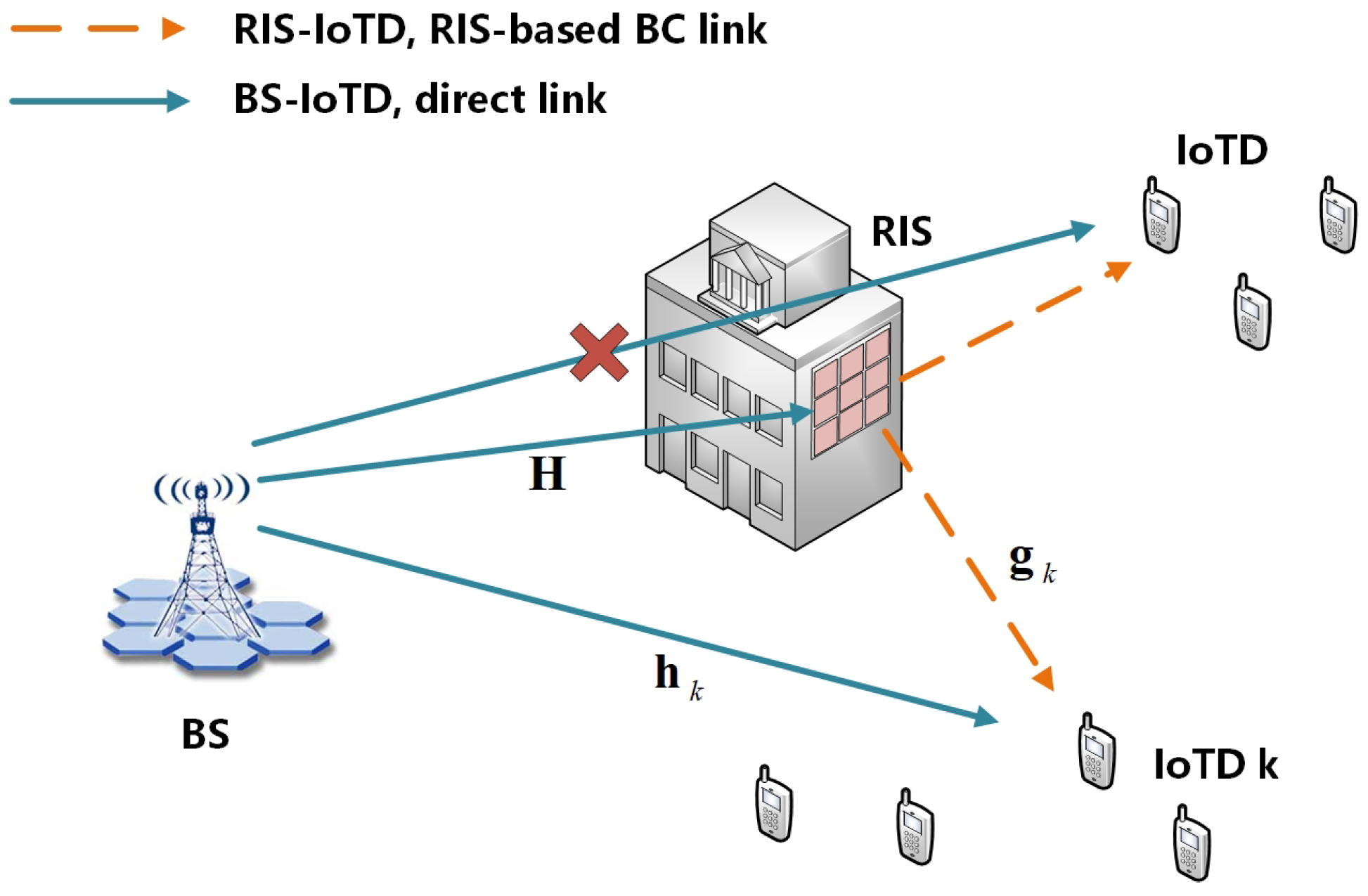
- In this paper, we consider a self-sustainable RIS-harvesting energy from the BS and remodulate the target signals to the IoTDs, which is a more practical method than those in previous works where passive RISs are considered. Moreover, in the BackCom step, extra thermal noise is incorporated and transmitted to the IoTDs.
- In order to satisfy the QoS of all the IoTDs, we formulate the sum data transmit rate maximization problem that maximizes the sum receiving data rate of the IoTDs, subject to the unit modulus of the phase shifts of the RIS and the transmit power of the BS for energy-harvesting. To address this non-convex optimization problem, an alternative optimization algorithm is adopted to deal with the non-convex constraints. Then, the transmit power beamforming is updated in an quadratically constrained quadratic program (QCQP) and the the phase shifts are updated by the penalty convex–concave procedure (CCP).
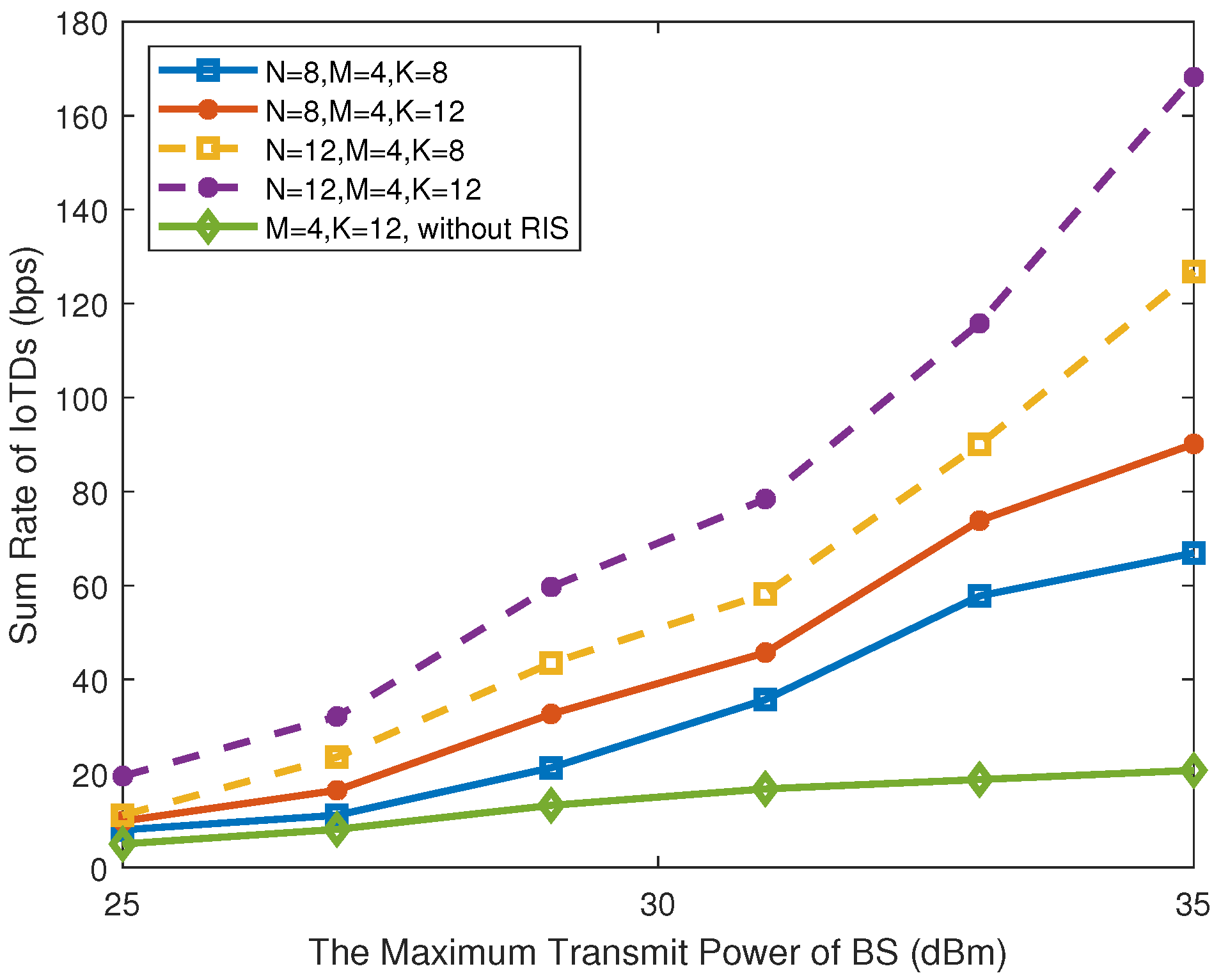
- We demonstrate the effectiveness of the proposed algorithm through numerical results, showing that the sum data rate of all the IoTDs can achieve better performance under different system parameters, such as the number of reflecting elements of the RIS, the number of IoTDs and the maximum transmit power of the BS.
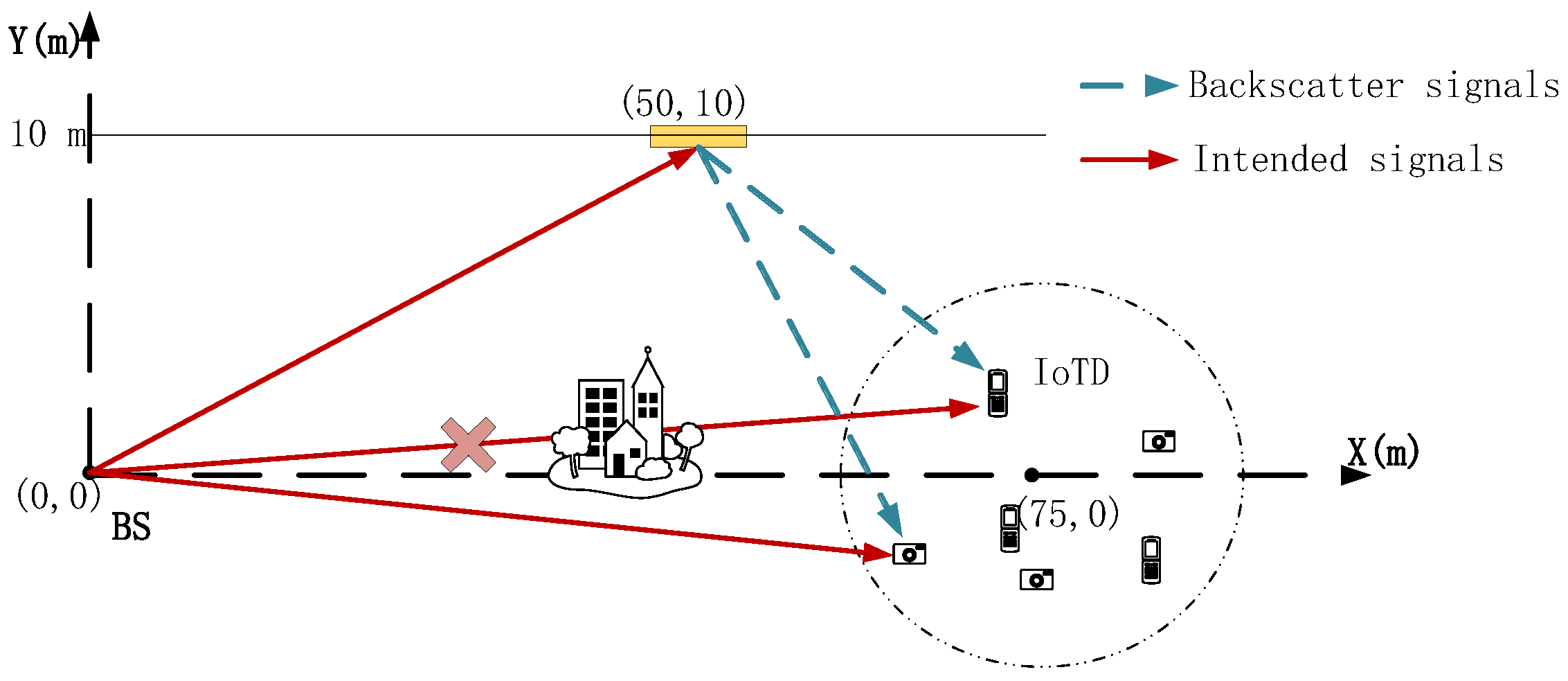
2. System Model
2.1. Problem Formulation
2.2. Time Allocation Optimization
2.3. Beamforming Vector Optimization
2.4. Phase Shift Optimization of the RIS
2.5. Computational Complexity Analysis
3. Simulation Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- AlSelek, M.; Alcaraz-Calero, J.M.; Wang, Q. Dynamic AI-IoT: Enabling Updatable AI Models in Ultralow-Power 5G IoT Devices. IEEE Internet Things J. 2024, 11, 14192–14205. [Google Scholar] [CrossRef]
- Alzahrani, S.; Salh, A.; Audah, L.; Alhartomi, M.A.; Alotaibi, A.; Alsulami, R. Empowering Energy-Sustainable IoT Devices with Harvest Energy-Optimized Deep Neural Networks. IEEE Access 2024, 12, 70600–70614. [Google Scholar] [CrossRef]
- Fu, W. Stochastic Geometric Analysis of Handover Based on Fuzzy Logic in MIMO IoT Systems. IEEE Internet Things J. 2022, 9, 11004–11016. [Google Scholar] [CrossRef]
- Zhang, S.; Wu, Q.; Xu, S.; Li, G.Y. Fundamental Green Tradeoffs: Progresses, Challenges, and Impacts on 5G Networks. IEEE Commun. Surv. Tutor. 2017, 19, 33–56. [Google Scholar] [CrossRef]
- Almekhlafi, M.; Arfaoui, M.A.; Assi, C.; Ghrayeb, A. A Low Complexity Passive Beamforming Design for Reconfigurable Intelligent Surface (RIS) in 6G Networks. IEEE Trans. Veh. Technol. 2023, 72, 6309–6321. [Google Scholar] [CrossRef]
- Lu, Y. Secrecy Energy Efficiency in RIS-Assisted Networks. IEEE Trans. Veh. Technol. 2023, 72, 12419–12424. [Google Scholar] [CrossRef]
- Bian, M.; Shi, Y.; Huang, Y.; Tang, X. QoS-Aware Energy Storage Maximization in the RIS-Aided Joint-SWIPT-MEC System. IEEE Commun. Lett. 2023, 27, 3434–3438. [Google Scholar] [CrossRef]
- Mohamed, A.; Zappone, A.; Renzo, M.D. Bi-Objective Optimization of Information Rate and Harvested Power in RIS-Aided SWIPT Systems. IEEE Wireless Commun. Lett. 2022, 11, 2195–2199. [Google Scholar] [CrossRef]
- He, Z.; Shen, H.; Xu, W.; Zhao, C. Low-Cost Passive Beamforming for RIS-Aided Wideband OFDM Systems. IEEE Wireless Commun. Lett. 2022, 11, 318–322. [Google Scholar] [CrossRef]
- Yue, M.; Liu, L.; Yuan, X. RIS-Aided Multiuser MIMO-OFDM With Linear Precoding and Iterative Detection: Analysis and Optimization. IEEE Trans. Wireless Commun. 2023, 22, 7606–7619. [Google Scholar] [CrossRef]
- Zhi, K.; Pan, C.; Zhou, G.; Ren, H.; Elkashlan, M.; Schober, R. Is RIS-Aided Massive MIMO Promising With ZF Detectors and Imperfect CSI? IEEE J. Sel. Areas Commun. 2022, 40, 3010–3026. [Google Scholar] [CrossRef]
- Zhi, K.; Pan, C.; Ren, H.; Wang, K. Power Scaling Law Analysis and Phase Shift Optimization of RIS-Aided Massive MIMO Systems With Statistical CSI. IEEE Trans. Commun. 2022, 70, 3558–3574. [Google Scholar] [CrossRef]
- Jiang, T.; Zhang, Y.; Ma, W.; Peng, M.; Peng, Y.; Feng, M.; Liu, G. Backscatter Communication Meets Practical Battery-Free Internet of Things: A Survey and Outlook. IEEE Commun. Surv. Tutor. 2023, 25, 2021–2051. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, G.; Atapattu, S.; Tsiftsis, T.A.; Tellambura, C. Is Backscatter Link Stronger than Direct Link in Reconfigurable Intelligent Surface-Assisted System? IEEE Commun. Lett. 2020, 24, 1342–1346. [Google Scholar] [CrossRef]
- Wang, X.; Fei, Z.; Wu, Q. Integrated Sensing and Communication for RIS-Assisted Backscatter Systems. IEEE Internet Things J. 2023, 10, 13716–13726. [Google Scholar] [CrossRef]
- Zhao, J.; Ye, J.; Guo, S.; Bai, Z.; Zhou, D.; Mohamed, A. Reconfigurable Intelligent Surface Enabled Joint Backscattering and Communication. IEEE Trans. Veh. Technol. 2024, 73, 771–782. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, R.; Fan, L.; Liu, A. Antenna Mode Switching for Full-Duplex Destination-Based Jamming Secure Transmission. IEEE Access 2018, 6, 9442–9453. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, R.; Wang, Y.; Pan, G.; Li, C. Artificial Noise Aided Precoding With Imperfect CSI in Full-Duplex Relaying Secure Communications. IEEE Access 2018, 6, 44107–44119. [Google Scholar] [CrossRef]
- Gao, Y.; Wu, Q.; Zhang, G.; Chen, W.; Ng, D.W.K.; Renzo, M.D. Beamforming Optimization for Active Intelligent Reflecting Surface-Aided SWIPT. IEEE Wireless Commun. 2023, 22, 362–378. [Google Scholar] [CrossRef]
- Nezhadmohammad, P.; Abedi, M.; Emadi, M.J.; Wichman, R. SWIPT-Enabled Multiple Access Channel: Effects of Decoding Cost and Non-Linear EH Model. IEEE Trans. Commun. 2022, 70, 306–316. [Google Scholar] [CrossRef]
- Jiang, R.; Xiong, K.; Yang, H.-C.; Fan, P.; Zhong, Z.; Letaief, K.B. On the Coverage of UAV-Assisted SWIPT Networks With Nonlinear EH Model. IEEE Wireless Commun. 2022, 21, 4464–4481. [Google Scholar] [CrossRef]
- Dong, Y.; Hossain, M.J.; Cheng, J. Performance of Wireless Powered Amplify and Forward Relaying Over Nakagami- m Fading Channels With Nonlinear Energy Harvester. IEEE Commun. Lett. 2016, 20, 672–675. [Google Scholar] [CrossRef]
- Pejoski, S.; Hadzi-Velkov, Z.; Schober, R. Optimal Power and Time Allocation for WPCNs With Piece-Wise Linear EH Model. IEEE Wireless Commun. 2018, 7, 364–367. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, R.; Deng, Y.; Shu, F.; Nie, Z.; Aghvami, A.H. Harvest-and-Opportunistically-Relay: Analyses on Transmission Outage and Covertness. IEEE Wireless Commun. 2020, 19, 7779–7795. [Google Scholar] [CrossRef]
- Wang, J.; Han, S.; Li, C.; Meng, W. Efficient Data Collection Scheme for IRS-Based V2I Backscatter Communications. IEEE Wireless Commun. Lett. 2024, 13, 1128–1132. [Google Scholar] [CrossRef]
- Zhou, G.; Pan, C.; Ren, H.; Wang, K.; Nallanathan, A. A framework of robust transmission design for IRS-aided MISO communications with imperfect cascaded channels. IEEE Trans. Signal Process. 2020, 68, 5092–5106. [Google Scholar] [CrossRef]
- Nesterov, Y.; Nemirovskii, A. Interior-Point Polynomial Algorithms in Convex Programming; SIAM: Philadelphia, PA, USA, 2004. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Alternating Algorithm for Maximizing Sum Rate of All the IoTDs |
|---|
| 1: Initialization, initialize feasible , and , the maximum iteration |
| number , and the iteration number . |
| 2: Repeat |
| 3: According to given , and , update and , by obtaining |
| the optimal value of Problem ; |
| 4: With obtained , and , update , by solving |
| Problem ; |
| 5: With fixed , , , , Obtain by solving Problem ; |
| 6: ; |
| 7: Until convergence or . |
| Parameters | Value |
|---|---|
| The block time T | 1 s |
| System bandwidth W | 1 MHz |
| The energy harvesting efficiency | 0.8 |
| The noise power , , | −80 dBm |
| The antenna number of the BS M | 4 |
| The maximum transmit power of the BS | 25∼35 dBm |
| The reflecting element number of the RIS N | 8∼24 |
| Path loss exponent | 4 |
| The number of the IoTDs K | 8∼24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Zheng, H.; He, C.; Wang, Y.; Wang, G. Reconfigurable Intelligent Surface-Based Backscatter Communication for Data Transmission. Electronics 2024, 13, 3702. https://doi.org/10.3390/electronics13183702
Li X, Zheng H, He C, Wang Y, Wang G. Reconfigurable Intelligent Surface-Based Backscatter Communication for Data Transmission. Electronics. 2024; 13(18):3702. https://doi.org/10.3390/electronics13183702
Chicago/Turabian StyleLi, Xingquan, Hongxia Zheng, Chunlong He, Yong Wang, and Guoqing Wang. 2024. "Reconfigurable Intelligent Surface-Based Backscatter Communication for Data Transmission" Electronics 13, no. 18: 3702. https://doi.org/10.3390/electronics13183702