1. Introduction
With the advantages of high mobility, strong climbing ability, and a short construction period, mining trucks have been widely used in open-pit mines all over the world. At the same time, there are also problems of high fuel consumption and transportation costs. We take the open-pit mine of Inner Mongolia Xilingol Baiyinhua Coal Power Co., Ltd. (hereinafter referred to as Baiyinhua No. 2 mine) as an example. From 2016 to 2018, the annual diesel consumption of 24 mining trucks was 9734 t, 8322 t, and 8589 t respectively, with an average annual diesel consumption of 370 t per mining truck. Driving style refers to the relatively stable and habitual internal driving behavior tendencies formed by a driver in the long-term driving process, which can be generally divided into aggressive type, normal type, and soft type [
1,
2]. Research showed that the difference of energy consumption between soft drivers and radical drivers was about 30% under the same route and vehicle type. Even under the condition of low requirements for driver operation, the difference of energy consumption was as high as 17% [
3,
4].
Similarly, researchers have shown that the driving style of mining truck drivers in open-pit mines has a direct impact on fuel consumption, when considering the influence factors of mining truck fuel consumption, driving style cannot be ignored as an important indicator [
5,
6]. John et al. [
7] constructed a virtual 24/7 driving style model of open-pit mining trucks, dividing the style of driver into aggressive, normal, and soft types, and simulated the fuel consumption under different driving styles. The results showed that the fuel consumption of aggressive, normal, and soft driving styles were 330 L/h, 300 L/h, and 295 L/h respectively under heavy-load conditions. Under no-load conditions of mining trucks, the fuel consumptions of aggressive, normal, and soft driving styles were 210 L/h, 186 L/h, and 170 L/h respectively. In addition, among a series of fuel-saving technologies, in which drivers can make decisions, the best fuel-saving effects can be as high as 25%, by changing the driving style [
8]. Driving skill training could bring about 2–5% fuel-saving effects [
9,
10,
11], and summarized references about the influence of driving style on fuel consumption (as shown in
Table 1).
Marina Martinez et al. [
12] pointed out that driving style played an important role in energy management and safe driving, and that using machine learning to identify driving styles and applying this to vehicle intelligent control has become the future development trend. Therefore, it is of great significance for driver training and fuel-saving driving to establish a high precision driving style identification model for open-pit mining truck drivers. At present, the research methods of driving style include questionnaire surveys and objective driving data analysis. Shinar et al. [
13] showed that the identification effect of the questionnaire survey method was limited due to its strong subjectivity and lack of objective data support. Objective driving data analysis can be carried out on the basis of real vehicle roads or simulation test platforms, which use sensors to collect driving behavior data such as vehicle speed, throttle opening, and longitudinal acceleration [
14,
15]. This method is widely used due to the high data reliability and real reflection of driving style. With the development of data technology and modern communication technology, increasing amounts of driving behavior data can be collected, therefore, machine learning can be used to extract knowledge from the data.
Machine learning is divided into unsupervised learning and supervised learning, according to whether the data sample has labeled attributes [
16]. Research based on machine learning applied to driving style classification can be roughly divided into the following three categories.
(1) Unsupervised machine learning algorithms: Researchers used the statistical values of speed and longitudinal acceleration as the driving style characteristic parameters, and extracted driving style characteristic parameters based on principal component analysis (PCA), and K-means, density-based spatial clustering of applications with noise (DBSCAN), and spectral cluster algorithms were used to cluster driving styles [
14,
15,
17,
18]. Han et al. [
19] took speed and throttle opening as driving style characteristic parameters, and driving styles were classified by full Bayesian theory and kernel density estimation, compared with the traditional fuzzy logic (FL) method, and driving style identification accuracy was improved. Zhu et al. [
20] proposed an unsupervised clustering method of driving style based on Kullback–Leibler (KL) divergence, where Gaussian mixture model (GMM) was used to represent the statistical distribution of the drivers’ real driving data, and driving style clustering was realized based on the similarity between different distributions.
(2) Supervised machine learning algorithms: Karginnova et al. [
21] compared k-nearest neighbor (KNN), neural networks (NN), and random forests (RF) in terms of recognition performance, and found that random forest was suitable for short term real-time classification application scenarios. Bejani et al. [
22] integrated KNN, support vector machines (SVM), multi-layer perceptron (MLP), and selected precision, recall, accuracy, f-scores as model evaluation indexes, and they were all greater than 92%. The overall effect was better than any classifier.
(3) Combined unsupervised and supervised algorithms: The authors in previous studies [
23,
24] adopted PCA to achieve a few comprehensive indicators through dimensionality reduction of driving behavior characteristic parameters, and then applied k-means or fuzzy c-means (FCM) to calibrate driving style data samples, and introduced supervised learning SVM algorithms to establish driver driving style identification models. The model identification accuracies were above 90%.
At present, research on driving behavior in open-pit mines focuses more on safety aspects such as truck collision prevention [
25] and driver fatigue prevention [
26]. Daily management of fuel consumption related to driving behavior and driving style is mainly restricted by administrative orders [
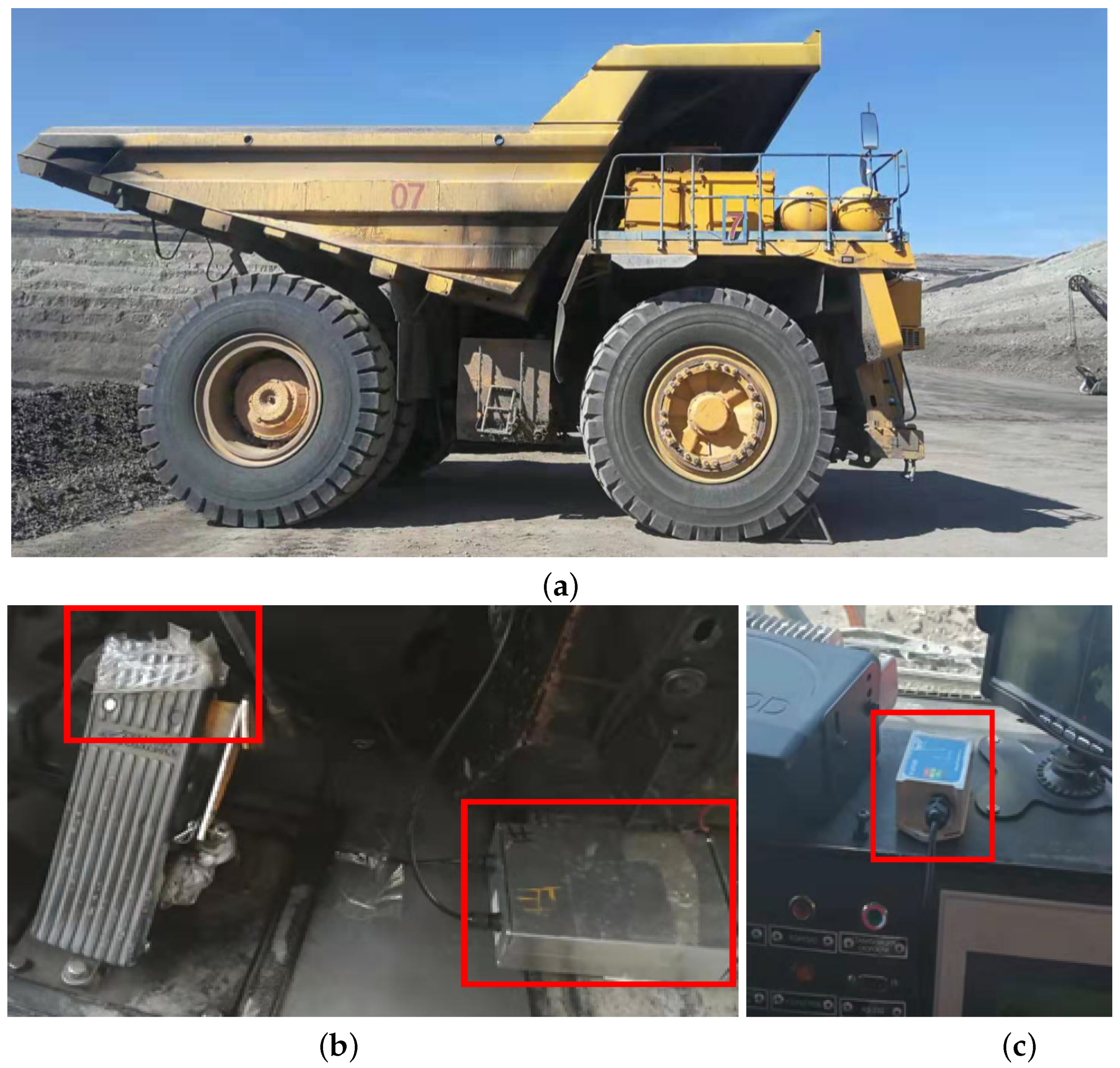
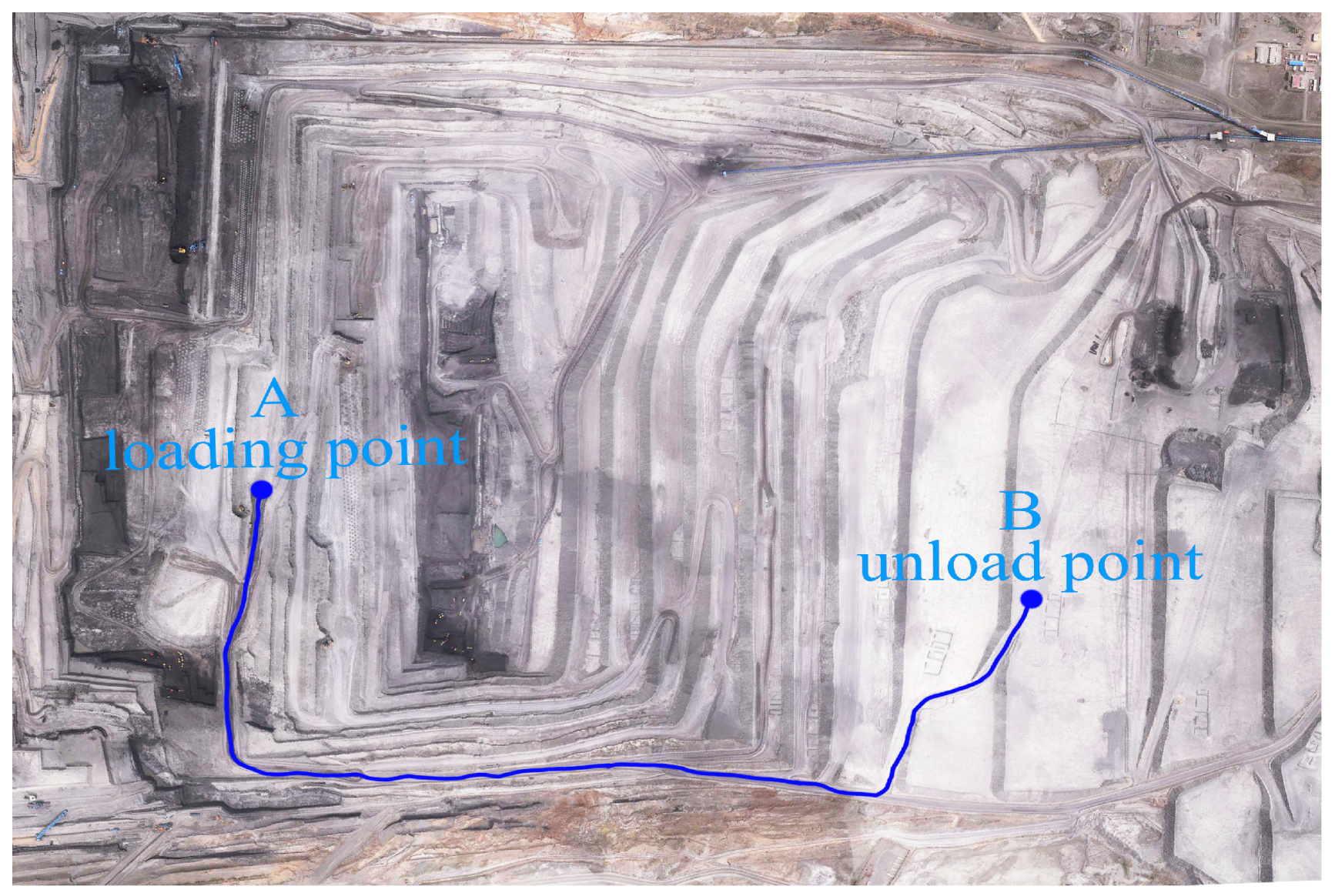
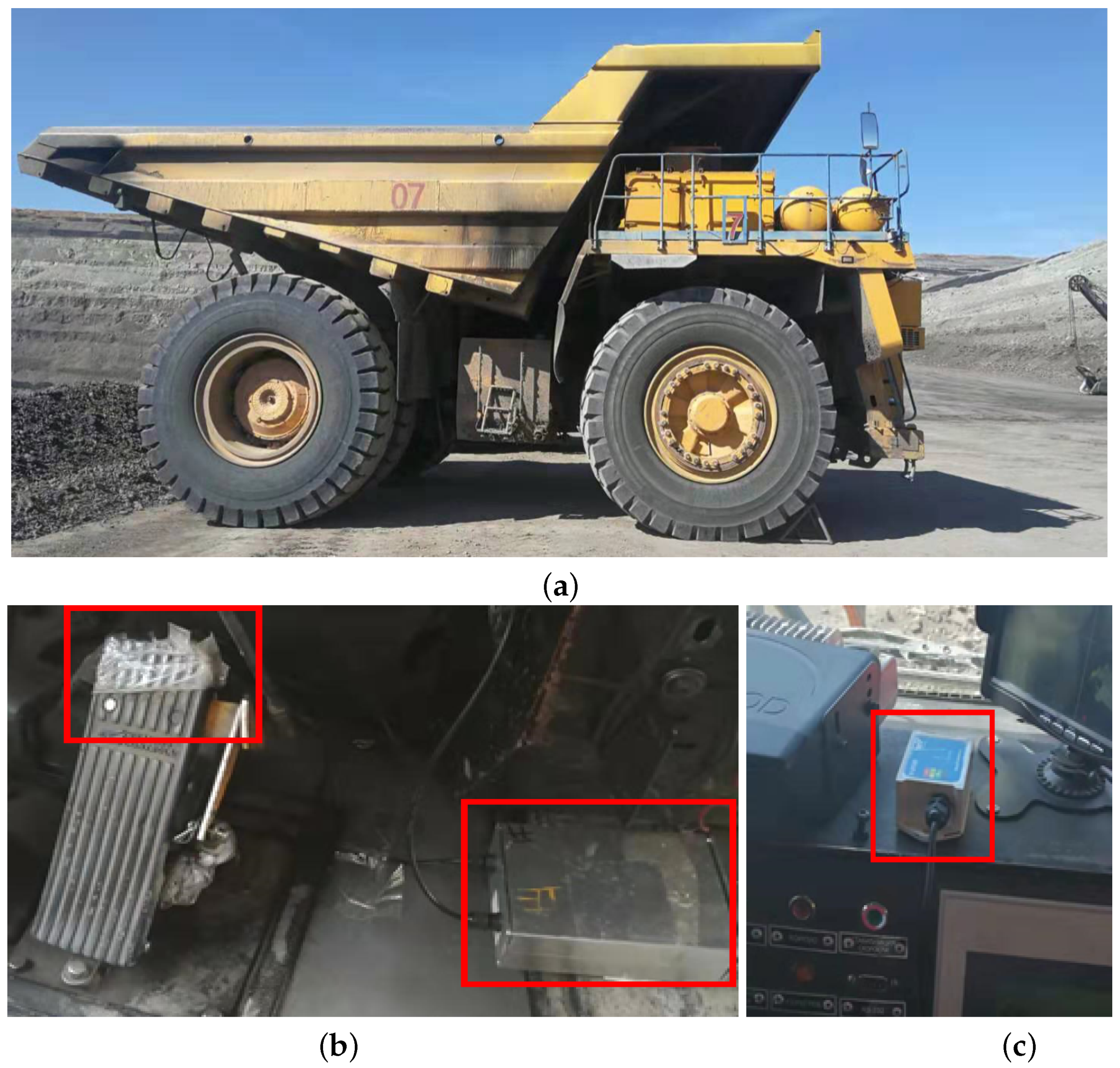
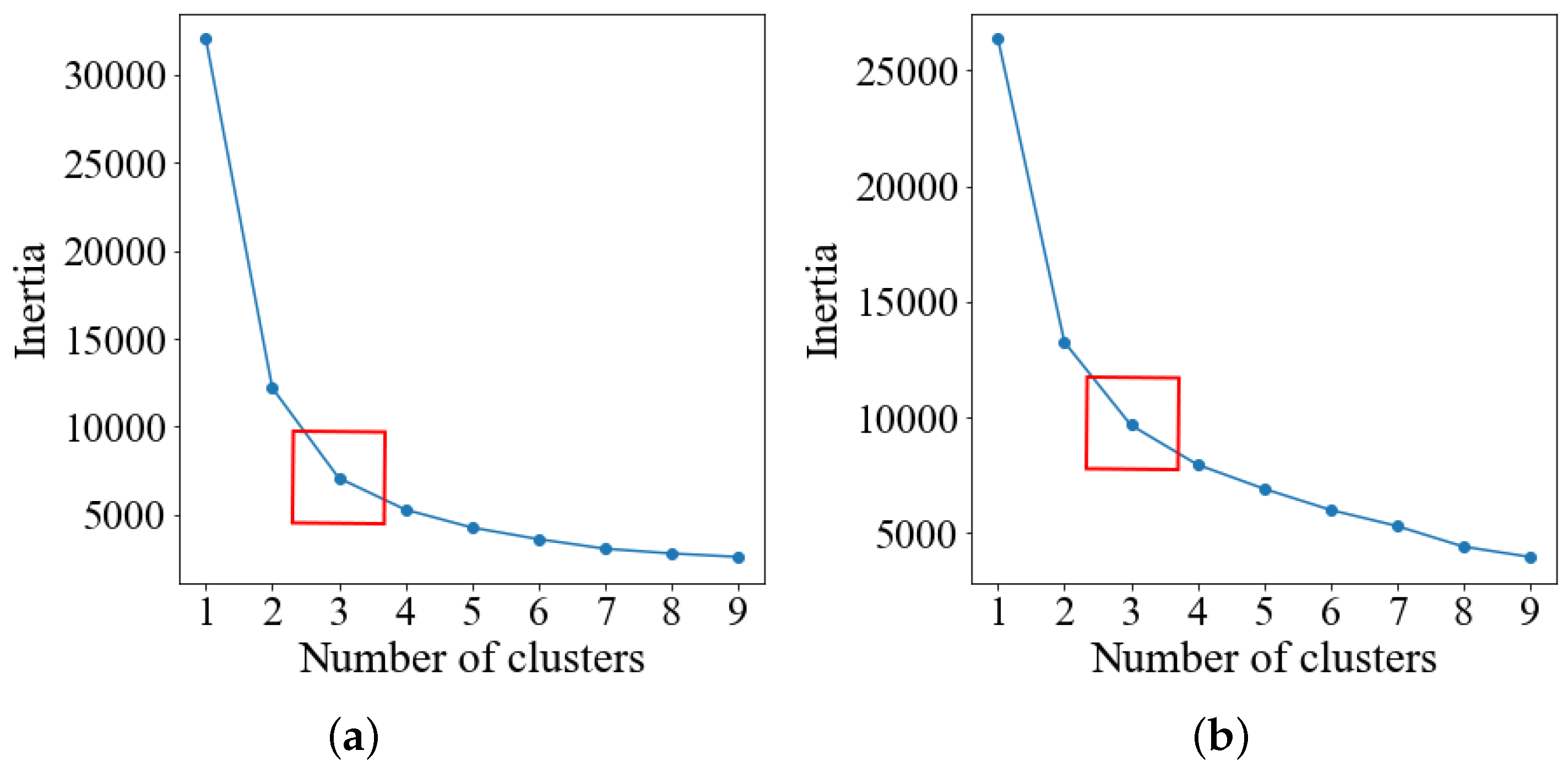
27]. Supervise whether the driver carries out the operation or not is difficult, at the same time, the management basis is not sufficient, and the management effect is not obvious. We adopted objective driving data analysis, based on the same experimental truck and haulage road, sensors were used to collect the data of driving behavior and mining truck status, such as throttle opening, speed, longitudinal acceleration, position, etc., and we adopted k-means to classify the driving style for different drivers. On this basis, the parameters of random forest, k-nearest neighbor, support vector machine, and neural network models were optimized and the accuracy was compared through a cross-validation grid search, and the model with the best accuracy was selected and the driving style identification model was constructed for mining truck under the conditions of heavy load and no load. Finally, the fuel consumption characteristics under different driving styles were calculated.
4. Conclusions
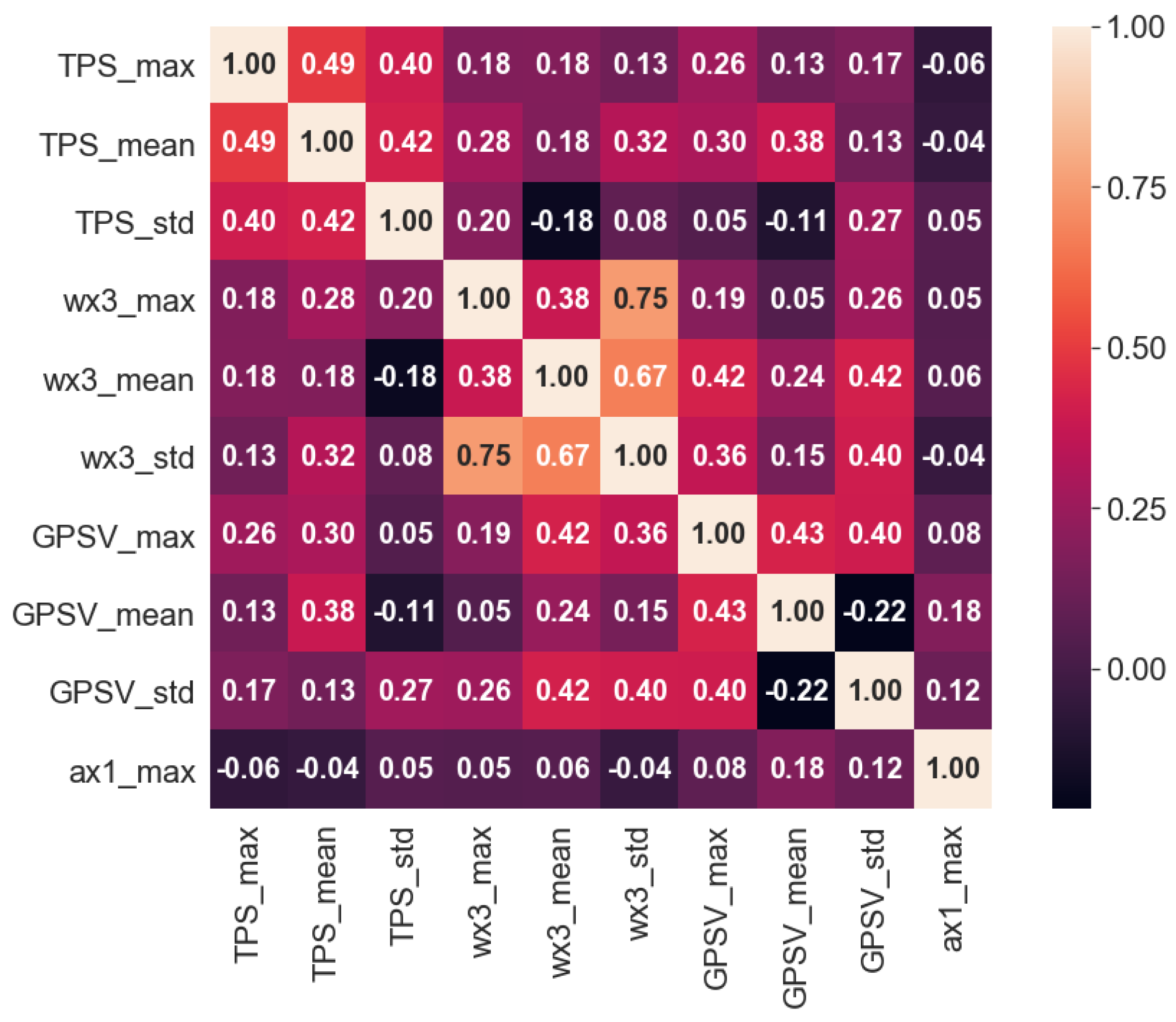
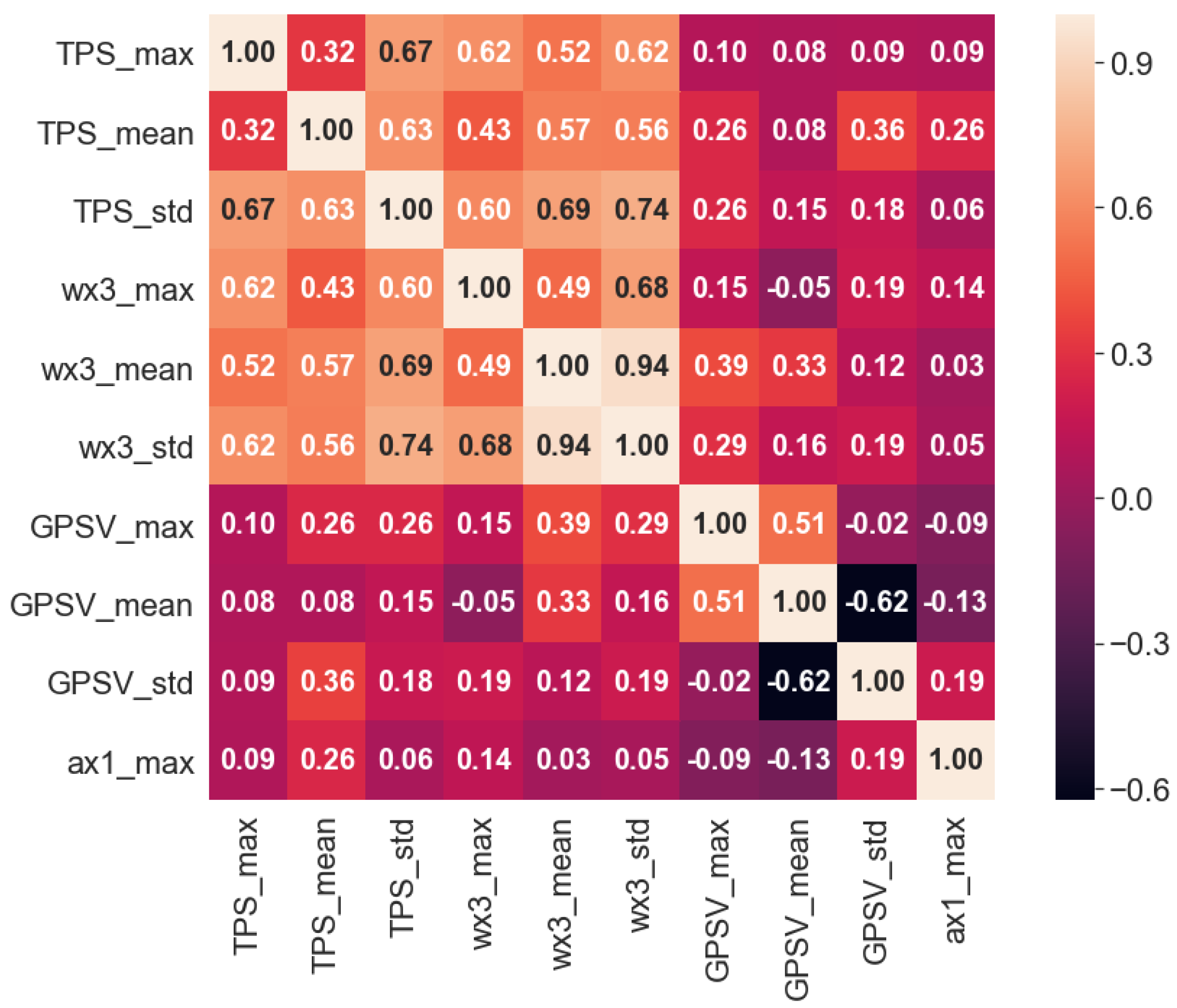
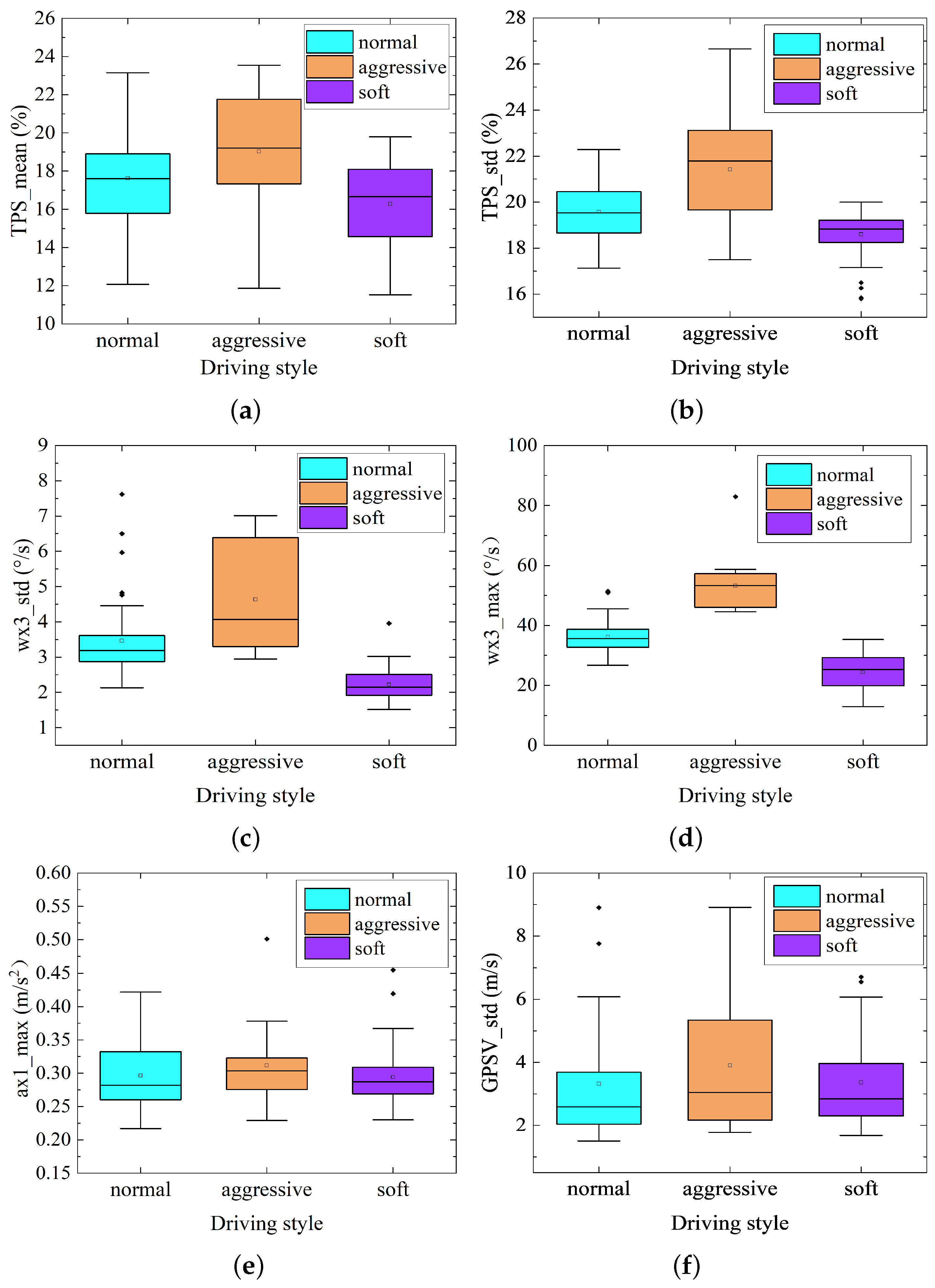
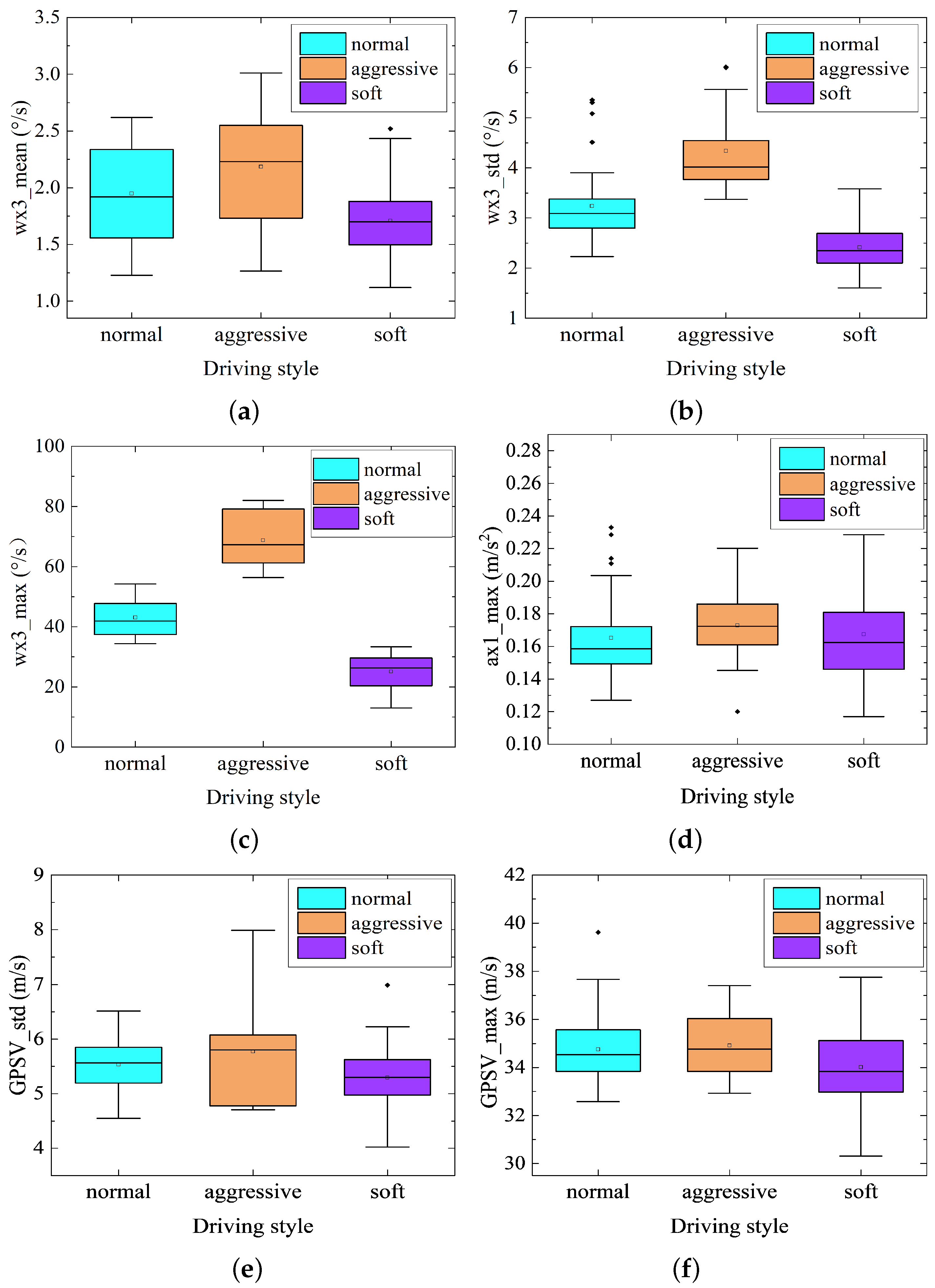
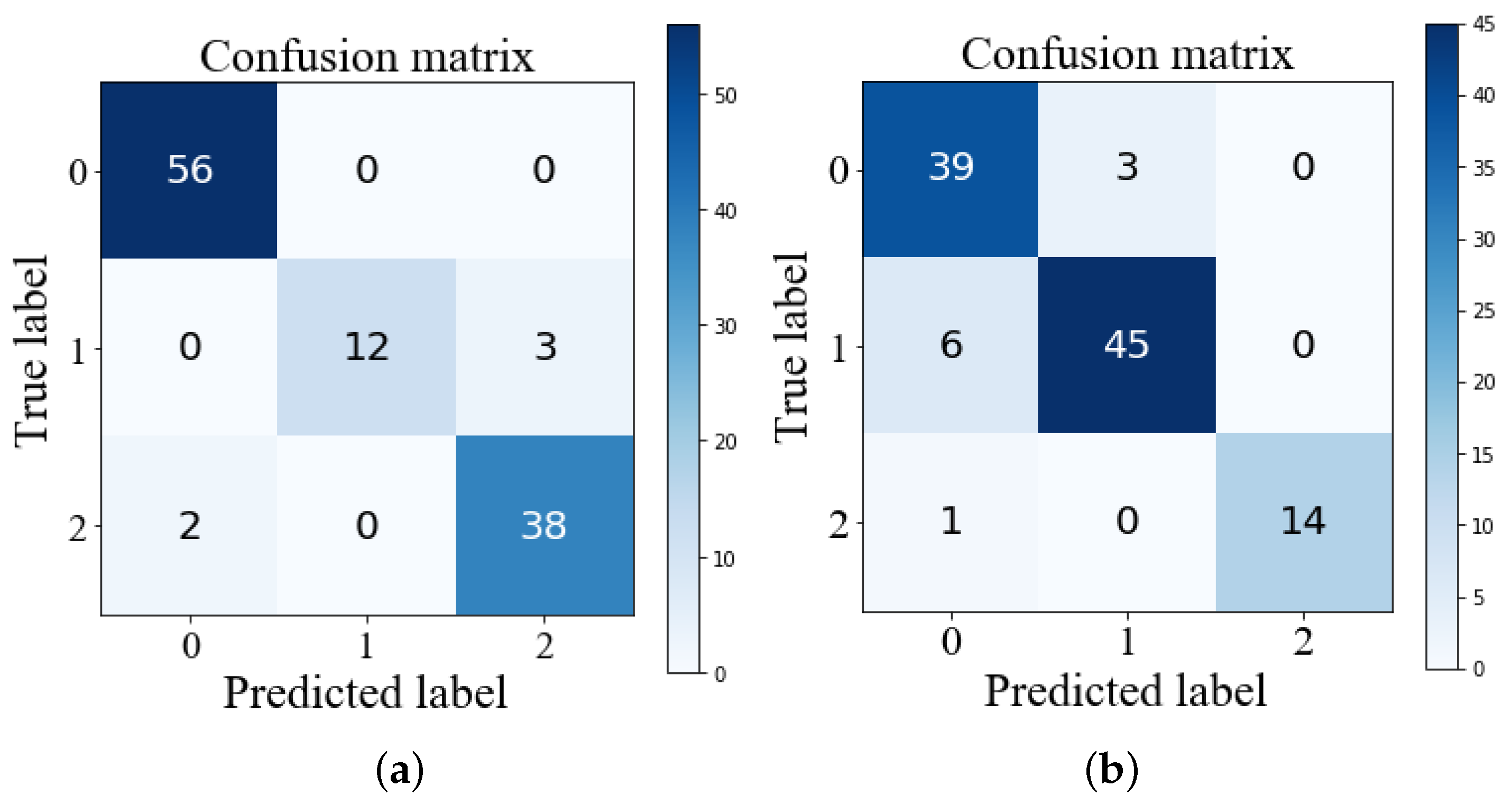
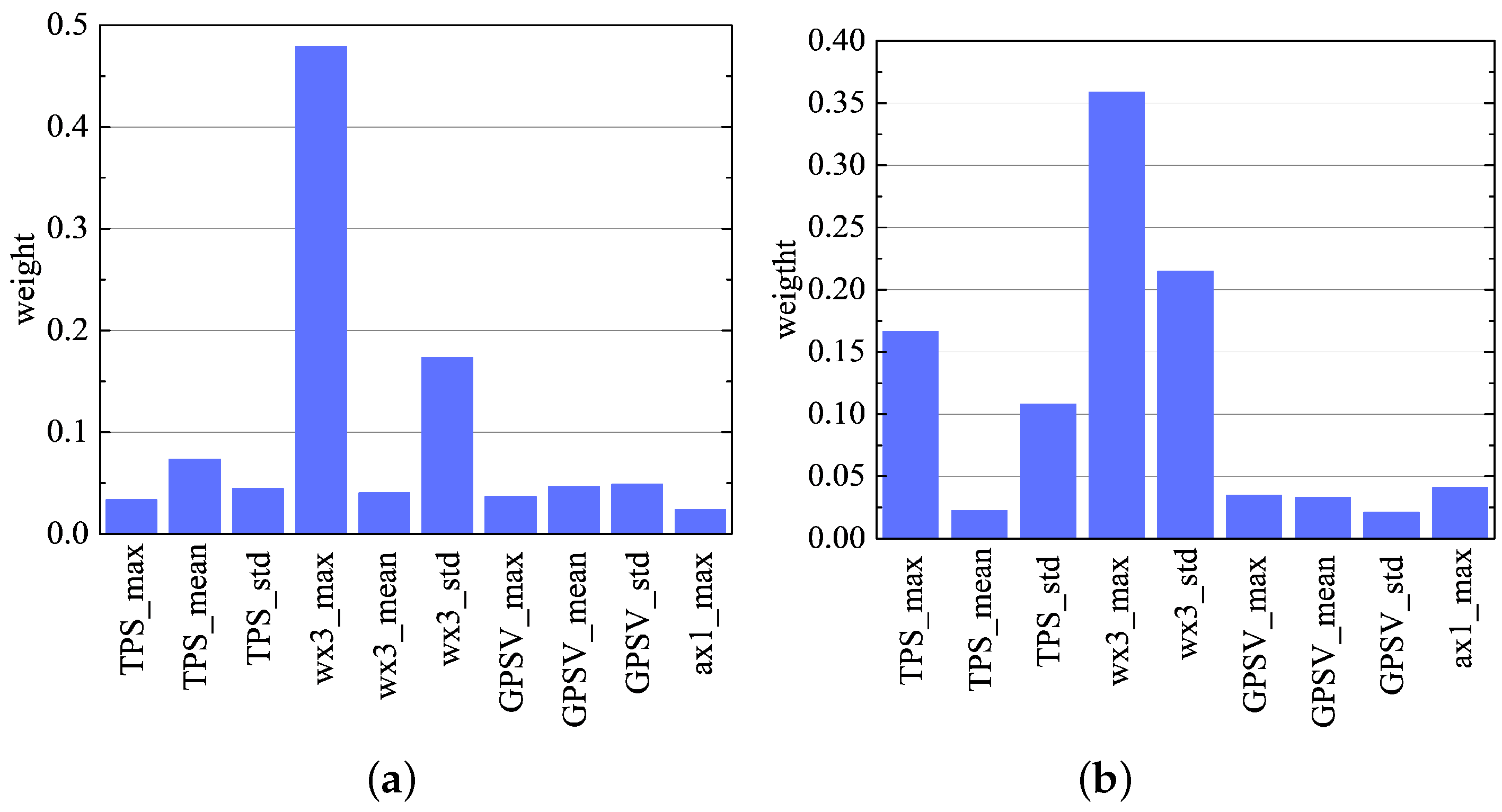
(1) Based on the same experimental truck and haulage road, the data of driving behavior of different mining truck drivers was collected by sensors. According to Pearson correlation analysis, redundant feature parameters were removed and driving style feature parameters were constructed for the mining truck under conditions of heavy load and no load, then K-means was used to classify driving styles. On this basis, the random forest algorithm was used to identify driving style. Finally, the weight values of driving style features were obtained based on the Gini coefficient. The results show that the accuracy rates of driving style recognition are all more than 90% for the mining truck under conditions of heavy load and no load, which provides a new method for driving style identification of mining truck drivers in open pits.
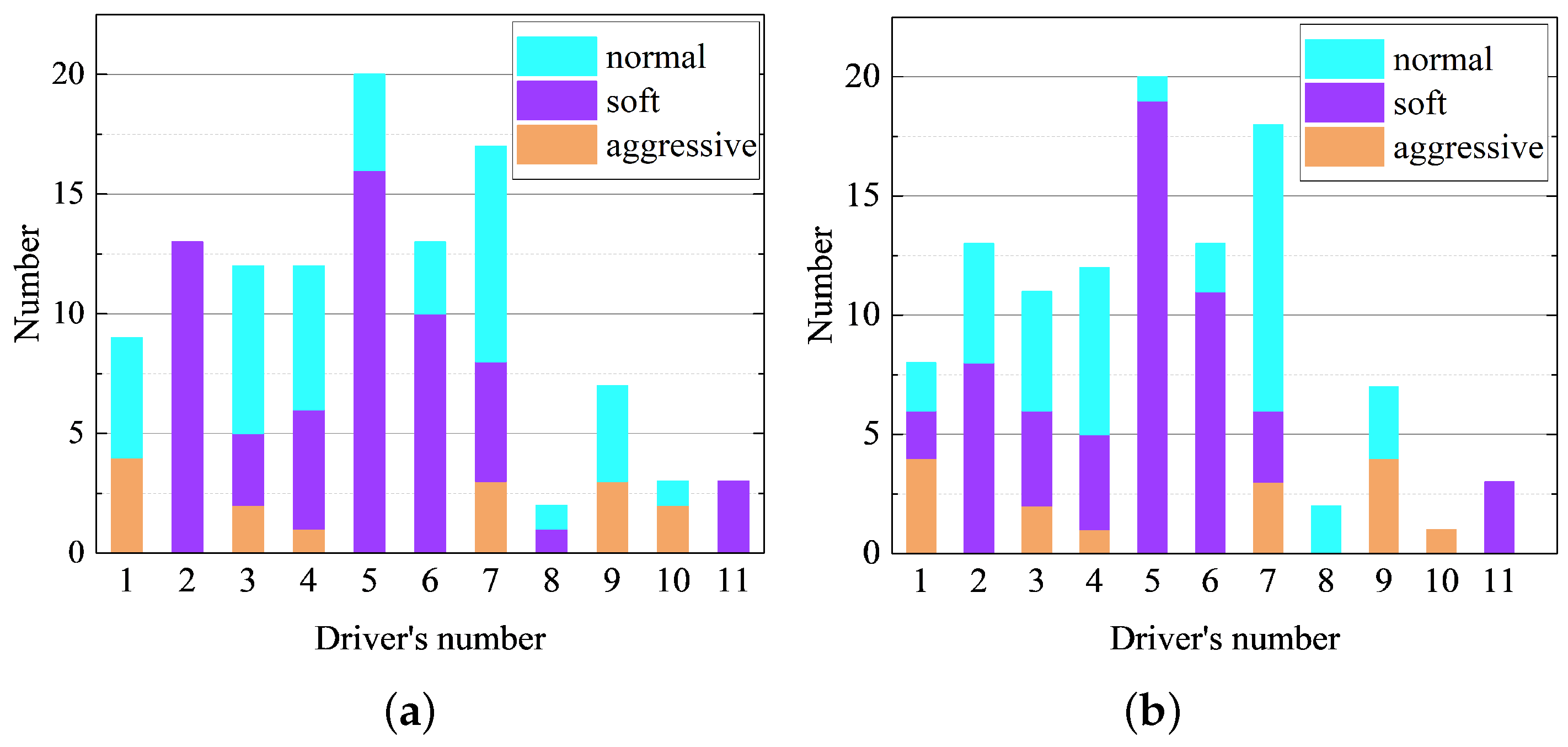
(2) The characteristic parameters related to throttle pedal angular velocity can characterize the driving style of mining trucks under heavy-load condition; the characteristic parameters related to throttle pedal opening and angular velocity can characterize the driving style of mining trucks under no-load conditions; the driving styles of mining truck drivers in an open-pit mine are not unique, and consist of different driving styles.
(3) The fuel consumption of the aggressive driving style was the largest and 10% higher than the average fuel consumption, while the fuel consumption of the soft driving style was not very different compared to the normal driving style. Therefore, it is necessary to focus on operational training for drivers with an aggressive driving style. These results can be directly applied to the daily fuel consumption management and driving operation training of truck drivers in open-pit mines to achieve the goal of fuel-saving driving.
This experiment required the same experimental truck and haulage road, which conflicted with the on-site mining truck scheduling, therefore, only 11 drivers’ driving behavior data were collected in this experiment. The next step is to extract more samples from driving behavior data to further improve the accuracy of the driving style recognition model. The slopes of the outer dump haulage road of the Baiyinhua No. 2 open-pit mine are mostly in the range of 3–8% and road slope has a great influence on drivers’ behavior, therefore, the influence of road slope on driving behavior should be considered and incorporated into driving style characteristic parameters.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}