1. Introduction
Automated vehicles (AVs) have given rise to a new field of study: human—automated vehicle interaction (H–AVI). H–AVI focuses on the study of the interface between humans and AVs across our society. H–AVI is primarily concerned with the humans’ reactions to the AV actions inside and outside the AV. These interactions are both dynamic and emergent and can be path-dependent and yet at times independent. H–AVI is a multidisciplinary field leveraging theories and approaches from social and behavioral sciences, computer and information science, communication, engineering, architecture, policy, design, and urban and city planning.
Despite acknowledging the importance of context, researchers in the H–AVI field have seemed to largely ignore it. In this paper, context is defined as the potential backdrop in which human–AV interactions take place. This context can enable, constrain or fundamentally change the nature of human–AV interactions. In this paper, the author argues that by taking a socio-ecological view of H–AVI, scholars can identify the contextual influences needed to better understand H–AVI. To address this, the paper presents an H–AVI framework based on a socio-ecological view. The author employs the framework to identify and briefly discuss unexplored areas. These areas include: (i) the transportation infrastructure, (ii) national and regional differences, (iii) special and vulnerable populations and (iv) simultaneous impacts of different H–AVI types.
In the next sections, the author (i) provides a brief description of the concepts that underlie H–AVI, (ii) introduces the field’s grand challenges and (iii) presents the three primary H–AVI dyadic interactions along with their challenges and opportunities. Then, the author (iv) presents the socio-ecological view and the H–AVI framework derived from it and (v) demonstrates this view’s value in identifying areas related to the social context of the H–AVI study.
2. Background
What is an AV? The word “automated” can be understood along a continuum. SAE International [
1] outlines levels of automation ranging from 0 to 5. Vehicles at level 0 have little or no automation, for example, vehicles without anti-lock brakes. Most vehicles currently manufactured have some level of automation that would disqualify them from being classified at level 0. Level 5 denotes an AV that could perform all driving activities without any human intervention or supervision and do so without any restrictions (i.e., anywhere, anytime). No level 5 vehicles are available today. Tesla’s autopilot system would be classified somewhere between 2 and 3 [
2,
3]. Level 2 and level 3 vehicles rely on a human to supervise and intervene on behalf of the vehicle [
1]. Level 2 vehicles require constant supervision, while level 3 vehicles allow the driver to take his or her eyes off the road and engage in non-driving tasks [
4]. AV ridesharing services have been launched using level 4 autonomy, which does not need human intervention or supervision [
5]. However, level 4 AVs are restricted to driving under certain conditions. These conditions are normally defined in terms of geography, traffic and weather conditions (i.e., not anywhere, not anytime).
Research directed at levels 2 and 3 can be viewed as an extension of previous research on driver-assisted systems (DAS). DAS research is typically directed at reducing the driver’s cognitive and physical workload while increasing safety [
6]. Similarly, studies examining levels 2 and 3 automation address challenges associated with the driver and AV interdependence [
7]. The study of the “handoff problem” is an example of a level 2 and 3 problem [
8]. Handoff studies are directed at solving the breakdowns in the exchange of driving responsibility between the human and the AV [
9].
In this paper, the term AV(s) refers to levels 4 and 5 automation for several reasons: one, to avoid overlap or confusion with existing research on DAS; two, to address the new challenges and opportunities that are likely to be associated with the complete removal of the human driver. It is easy to see how pedestrians and vehicle interactions might change when there is no human driver at the wheel. On the contrary, it is much less clear how they might change when there is still a human driver at the wheel (i.e., levels 2 and 3).
3. Brief Overview of Human—Automated Vehicle Interaction Research
H–AVI scholars have knowingly or unknowingly divided the research into three subfields, each with a particular dyadic focus. All three are presented next.
3.1. Pedestrian and Bicyclist—AV Interactions (PB–AVI)
PB–AVI is an important subfield of H–AVI that focuses on the interactions between AVs and the pedestrians/bicyclists the AVs encounter. PB–AVI researchers seek to understand how AVs can be designed to ensure that these interactions are safe [
10,
11,
12,
13]. The removal of the human driver and the challenges derived from it compose one unifying theme of PB–AVI research. Research on pedestrian interactions with manually driven vehicles has highlighted the importance of communication between the pedestrian and driver to ensure safe interactions [
11,
14]. This communication is often done through verbal comments, hand gestures and eye contact [
15,
16]. The removal of the driver necessitates the study of ways the AV and the pedestrians/bicyclists can communicate to ensure safe interactions.
PB–AVI research can be divided into studies examining explicit and implicit communications between the AV and the pedestrians/bicyclists. Explicit communication studies examine how the placement of light-emitting diode (LED) signs on the AV can promote communications. Researchers have investigated the impact of the location of LED signs (e.g., side panels, overhead, windshield) on the effectiveness of AV communications [
17]. Other studies have examined what information should be displayed on the LED sign [
18]. Implicit studies have focused on understanding how humans interpret the AV’s driving behavior and how the AV should interpret the human behavior (e.g., [
10,
19]). This includes pedestrians using the speed of the AV to determine when they should cross. This area of inquiry is still rife with unanswered questions relating to the interpretation of human behavior by the AV: What body movements indicate that a pedestrian will/will not cross the road? What are the impacts of AV communication overload on pedestrians/bicyclists?
Table 1 lists some of the current questions.
3.2. Rider—AV Interactions (R–AVI)
The study of rider—AV interactions (R–AVI) is another subfield of H–AVI, this one focusing on the interactions between riders (those inside the car) and the AV. The term “rider” denotes the lack of a human driver (i.e., levels 4 and 5). Researchers who study R–AVI seek to understand how to design AVs to support interactions with their riders. Designing the AV without the human driver in mind is one of the unifying themes across R–AVI research.
Current vehicles are designed to support drivers and their ability to safely navigate the roadways. This places the driver at the center of the design requirements for the interior cab. Dashboards are designed to provide driver information while minimizing drivers’ cognitive effort or the need to take their eyes off the road [
20,
21]. If the driver is removed and all humans are considered riders, new questions arise: What and when should the AV communicate with the riders? What type and how much information would riders need/want from the AV?
Table 2 lists some of the current questions.
3.3. Vehicle—AV Interactions (V–AVI)
This subfield of vehicle—AV interactions (V–AVI) focuses on the interactions between AVs and other vehicles. Researchers who study V–AVI seek to understand how Avs can be safely integrated into traffic. For example, V–AVI scholars seek to understand how Avs can signal their intent to other vehicles on the roadways and interpret the intention of other vehicles. The signaling, interpretation and ultimate response (i.e., driving action) are at the heart of V–AVI.
The challenges associated with communicating and interpreting intentions by V–AVI are compounded by the frequency and the high speed of such interactions. Challenges to V–AVI include the cooperation and coordination needed to pass or be passed by other vehicles [
22,
23,
24,
25]. For example, merging is a potential driving behavior that often requires cooperation and coordination between vehicles [
26]; many vehicles attempt to merge into another lane by veering into it in front of another vehicle already in that lane; this veering is an implicit request to yield, directed at the vehicle currently in the lane. However, this request is not always granted, and depending on other traffic conditions, the vehicle currently in the lane might not yield. Merging also highlights another dimension of V–AVI—competition. AVs and other vehicles not only have to cooperate and coordinate but also must compete for lane space as well as passing and turning opportunities. This begs the following questions: If or when should the AV yield to other vehicles? How can the AV avoid being bullied by other vehicles?
Table 3 lists some of the current questions.
3.4. Current Approach Shortcomings
Scholars would agree that social norms and rules are vital to understanding human interactions with AVs. However, the dyadic focus, human and AV, fails to fully capture the impact of the social context that often represents these very norms and rules. This is even more problematic when we acknowledge that social norms and rules differ significantly across regions and countries. As such, this dyadic focus fails to provide an adequate framework to guide future research. Next, the paper presents a socio-ecological view of H–AVI to address these shortcomings.
4. H–AVI Grand Field Challenge: The Social AV
The first grand challenge relates to the social nature of driving. Driving can seem like a very straightforward algorithmic and rule-based activity. For example, society has laws that explicitly outline rules regarding how one should drive. Vehicles should stop at red lights and go at green lights. On the contrary, as we have learned while attempting to program vehicles to drive, driving is actually a very socially cooperative activity [
27,
28]. Driving is performed by complex cooperation and coordination achieved through mutual understanding among humans and their environment via shared norms and rules [
29]. Social norms and rules are embedded in a dynamic and complex social system [
29,
30,
31,
32]. Many driving norms are not codified into law but instead are informal and learned through socialization.
This begs the question:
How does one teach an AV to be social? To answer this question, we need to address at least two fundamental issues. One, how can we teach the AV to interpret implicit forms of human social communication? Human driving often involves implicit rather than explicit forms of communications [
33]. This problem might seem to be addressed by technical advances in computational and visual sciences. However, they alone are not sufficient in the area of interpretation. Two, how should we design AVs to actively participate in these often implicit social interactions? For example, it is one thing to teach an AV to interpret eye gazes by human drivers, yet it is another to enable it to respond in a way that the human driver can interpret.
Table 4 lists some of the current challenges to designing a more social AV.
This is the answer: Contextualizing H–AVI. The interpretation of human action requires an understanding of the context in which the action is embedded. Problems related to the interpretation of human action within a given context still elude us. Next, the paper discusses what context is and its importance to better understanding H–AVI.
5. Context
5.1. What Is Context?
There are many definitions of context (see
Table 5). Definitions generally include the term “surroundings” in reference to the immediate physical and/or social setting that a particular phenomenon of interest is embedded within [
34,
35]. Other definitions highlight the potential of the environment or situation to enable or constrain a particular phenomenon of interest [
36,
37]. Yet other definitions highlight the need for the context to exist at a unit of analysis above the actual phenomena being studied [
34,
35].
This paper defines a context as a potential backdrop that a phenomenon of interest could be placed within. This backdrop could enable, constrain or fundamentally change the nature of that phenomenon of interest. Specifically, an AV’s context is defined as the backdrop that can potentially enable, constrain or fundamentally change the nature of the H–AVI.
5.2. Why Is Context Important?
Context and contextual influences within H–AVI research have the potential to provide greater clarity in understanding how relationships between humans and AVs change across different settings. Context can both moderate and dictate the relationships between constructs or even manifest as a main effect [
36,
37]. To understand the influence of context, it is important to understand the various ways it can materialize in research.
Hong et al., (2014) [
39] identified three ways context materializes in research. First, context materializes as a control variable related to the dependent variable but not the independent variable. This approach treats context as a statistical factor needed to be accounted for in any empirical analysis. Second, context materializes when measures of the phenomenon of interest are adapted to a particular setting, for example by adapting a personality scale developed in a Western country for research in another country where the culture and language would render the current scale invalid. This is done to ensure that the meaning of the measures is equivalent across contexts [
40]. Finally, the third approach is treating the contextual influence as a moderator that alters the relationship between variables.
The importance of context is such that studies that ignore context can at times be problematic, especially when the context is expected to differ significantly across settings and have significant impacts. Therefore, acknowledging context helps to identify and explain its impact, which might have otherwise gone undetected or led to misinterpretation [
37,
41]. This influence of context can be subtle or dramatic, ranging from weakening existing well-known relationships to fundamentally changing those relationships. For example, Jayaraman et al., (2019) [
15] found that aggressive driving by an AV lowers the trust pedestrians have in the AV when it comes to crossing the street. However, in the presence of a traffic light, the aggressive driving by an AV had little or no impact on the trust pedestrians had in the AV [
15]. As stated, context can have more dramatic changes such as prompting curvilinear effects, reversing signs, changing causal direction, and even at times threatening validity [
37,
41]. In all, context has the potential to increase the accuracy of research and improve our interpretation of that research [
42].
6. Socio-Ecological View of Human—Automated Vehicle Interactions
One approach to ensure that H–AVI scholars acknowledge context is to view H–AVI through a socio-ecological framework. A socio-ecological framework was put forth in an attempt to bridge the divide between the study of social systems and natural systems [
43,
44,
45,
46,
47]. At the time, scholars studying social systems were focusing on human actions, often ignoring their environment, whereas ecological scholars were concentrating on the environment, often excluding the impact of human actions [
44]. A socio-ecological view recognizes that the separation between human actions and the environment is often artificial and arbitrary [
34,
48]. For H–AVI scholars, a socio-ecological view affords the opportunity to situate the interactions between humans and AVs within the context of a broader complex ecosystem. The socio-ecological view also highlights the role of humans and their institutions in shaping this complex adaptive ecosystem.
A socio-ecological view of H–AVI would help scholars recognize issues related to the social context inherent in all H–AVIs.
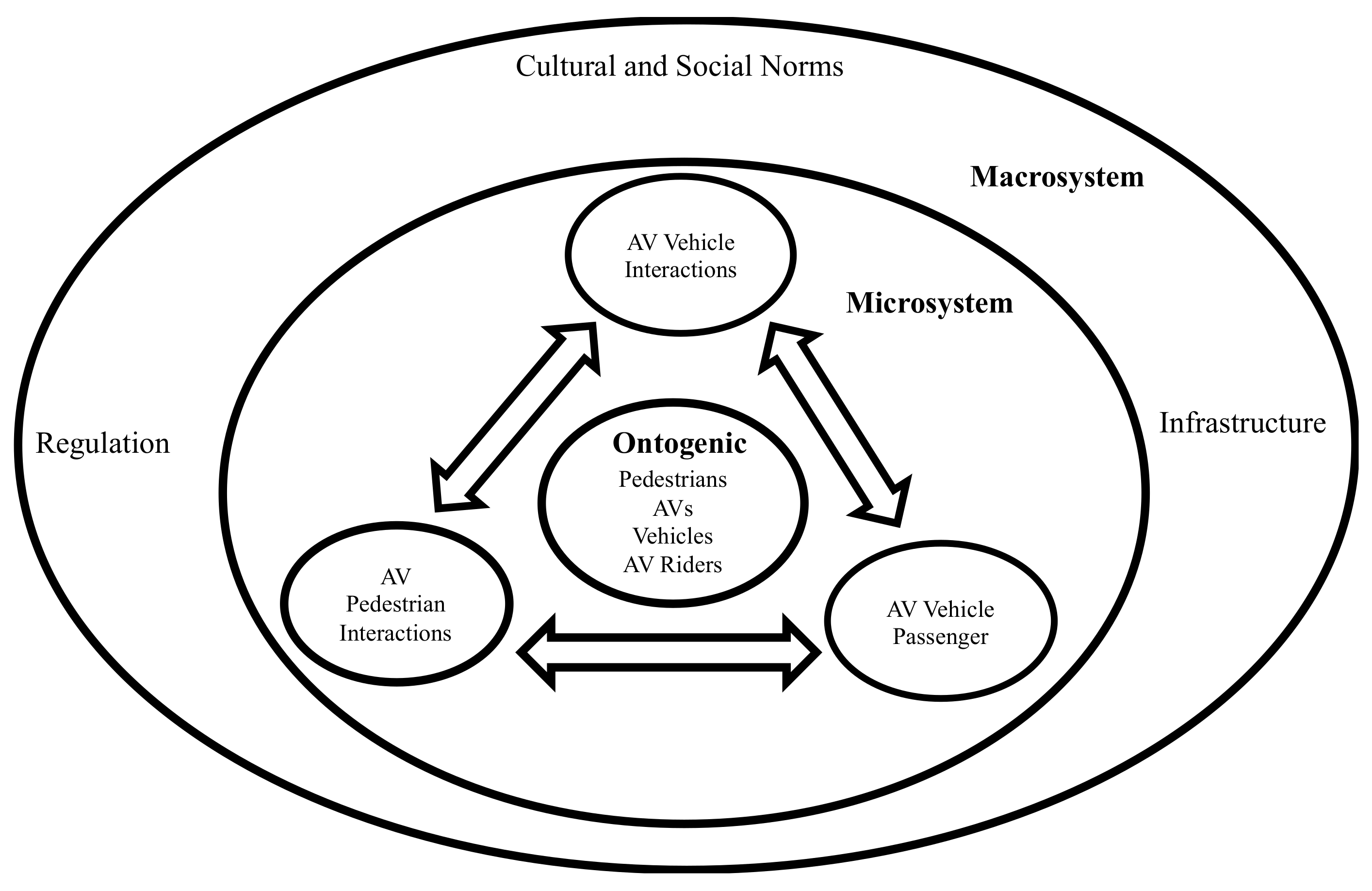
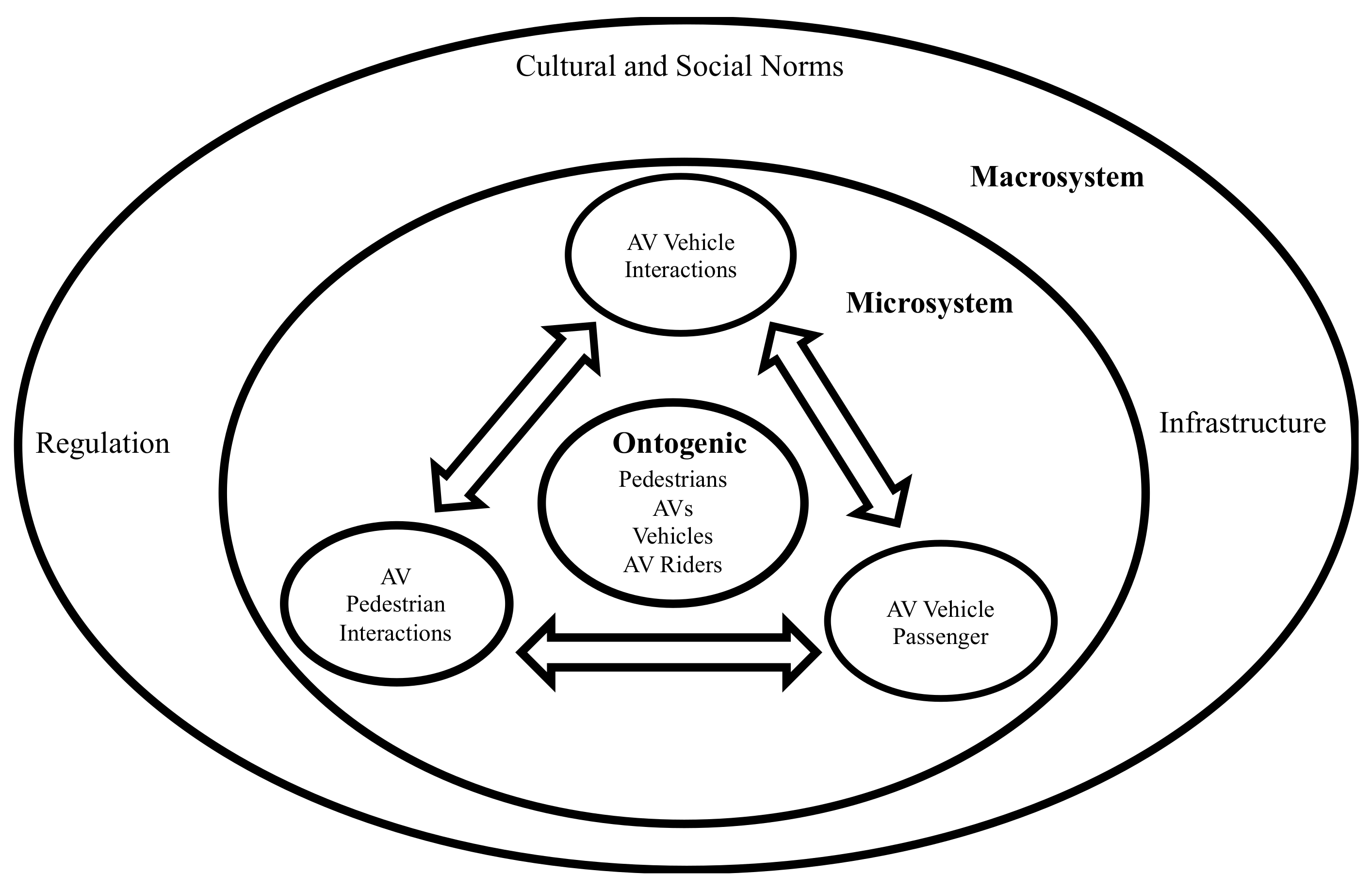
Figure 1 displays an application of Bronfenbrenner’s [
45] framework, which consists of three systems: ontogenic system, microsystem and macrosystem. The ontogenic system represents the individual characteristics of the various actors.
Figure 1 lists the various actors: pedestrians, AVs and other vehicles. The microsystem describes the immediate context involving the human—AV interaction and represents the dyadic interactions. The macrosystem entails the societal elements such as cultural and societal driving norms, national infrastructure and regulations.
6.1. Relatively Unexplored Areas
A socio-ecological framework highlights the importance of several relatively unexplored areas—infrastructure, regulations, and national and regional differences—in the study of H–AVI. Another important observation is the recognition of individual characteristics. These include potential differences in humans as well as in AVs. Next, we present and discuss challenges and opportunities in the areas highlighted by a socio-ecological view of H–AVI.
6.1.1. Infrastructure
There are many definitions of transportation infrastructure [
49]. For the sake of clarity, we define transportation infrastructure as the fundamental physical and organizational structures that comprise the operation of our walkways, roads and highways. This definition includes the traffic lights and crossing signals along with their signage. This definition also encompasses the computer systems and their processing power, the backbone of smart cities and communities.
Despite its importance, the H–AVI dyadic view largely ignores the infrastructure. In doing so, it fails to consider how interactions might change across different infrastructures. This results in studies and designs that assume that the AV is the primary if not the only source of computational power. This is problematic on two fronts. First, with the development of smart grids, much of the computational power needed for safe H–AVI could be offloaded to the infrastructure; this distributed cognition approach would likely be more effective for several reasons. Unlike AVs, the infrastructure has the ability to dynamically adjust traffic lights and crosswalk signs when needed to better coordinate H–AVIs. In addition, pedestrians and cyclists already rely on the infrastructure (e.g., traffic lights) for direction. Second, to ignore the infrastructure is to risk designing AVs that conflict with their environment. Imagine AVs signaling to pedestrians that they should cross while the crosswalk signal states otherwise.
6.1.2. Laws, Regulations and Ordinances
Although laws, regulations and ordinances differ at their level of creation and enforcement (i.e., national, state and city), they all represent formal rules that govern H–AVI. It is precisely their formality that differentiates them from social norms and rules, although both are often related and can be reinforcing. An example of a formal rule is a city ordinance that gives pedestrians the right of way to cross the street. Such ordinances vary considerably by community. Laws, regulations and ordinances not only differ across and within nations but are dynamic. New laws, regulations and ordinances are constantly being passed. These formal rules are designed to set limits on the actions of AVs, humans and other vehicles. Therefore, their inclusion into the study of H–AVI is vital.
6.1.3. Cultural and Social Norms
Social norms are a powerful determinant of driving behavior. Social norms can actually usurp driving laws when it comes to predicting driver behavior [
50]. Social norms have been used to explain many types of driver behaviors [
51,
52]. For example, social norms have been used to explain texting and driving, drinking and driving, and aggressive driving [
51,
52,
53,
54]. Other research has shown that social norms could be used to determine which driving tasks should be delegated to AVs versus humans [
55].
Driving norms and rules vary by region within and across nations. National differences are associated with risky driving decisions and aggressive driving definitions [
56,
57,
58,
59]. Attitudes toward advanced driving technologies also differ across nations [
60]. Likewise, researchers on regional differences within countries have found variations in driving norms [
61,
62].
Nonetheless, national and regional differences have not been taken seriously in the study of H–AVI. Future research is needed to understand how national and regional differences impact all types of H–AVI. For example, research has shown that models that use distance to collision to predict vehicle and pedestrian crashes differ significantly across countries [
63]. This highlights the problem with not including national differences in the PB–AVI area. In all, national and regional differences must be examined to fully comprehend H–AVI.
6.1.4. Individual Characteristics
A socio-ecological view highlights the importance of individual characteristics. Unfortunately, H–AVI research seems to ignore the importance of individual characteristics. More specifically, H–AVI research assumes that humans are fully abled rather than disabled. H–AVI scholars have paid less attention to conducting research where humans are assumed to have physical and mental disabilities (for an exception, see [
64]). This is particularly problematic in PB–AVI studies. PB–AVI studies are designed to help teach the AV how to predict and respond to pedestrians. However, it is not clear how accurate or useful models developed on people without disabilities will be when applied to people with disabilities (e.g., wheelchair users). Going forward, a socio-ecological view could help draw attention to the need to be more inclusive in the view of human characteristics.
6.2. Other Benefits
Another benefit of a socio-ecological view is that it highlights the often interdependent relationship among the types of interactions. For example, it is likely that an AV will have to interact with both pedestrians and other vehicles at the same time. The LED board might be effective at communicating with pedestrians but be a distraction to other vehicles. Communication among the AV, pedestrians and other vehicles would also have to align with signals from the infrastructure (traffic lights). A socio-ecological view helps to highlight these interdependencies and identify new areas of inquiry.
7. Conclusions
In this paper, the author has described a socio-ecological view of H–AVI. The goal was to demonstrate how such a view could be used to identify new research questions. However, a full discussion of the socio-ecological view and a comprehensive review of the H–AVI literature are beyond the scope of this paper. Nonetheless, this paper highlights the potential new insights from employing the socio-ecological view in the study of H–AVI.
Funding
This research was funded by the University of Michigan’s Mcity, grant number: 2017–2018.
Institutional Review Board Statement
This paper did not require IRB approval.
Informed Consent Statement
The paper did not require a constent statement.
Data Availability Statement
There is no data associated with this paper.
Acknowledgments
In this section, you can acknowledge any support given which is not covered by the author contribution or funding sections. This may include administrative and technical support, or donations in kind (e.g., materials used for experiments).
Conflicts of Interest
The author declares no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the result.
References
- SAE International. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. 2016. Available online: http://standards.sae.org/j3016_201609/ (accessed on 6 June 2021).
- Golson, J. Volvo Autonomous Car Engineer Calls Tesla’s Autopilot a ‘Wannabe’. April 2016. Available online: https://www.theverge.com/2016/4/27/11518826/volvo-tesla-autopilot-autonomous-self-driving-car (accessed on 6 June 2021).
- Korosec, K. Elon Musk Says Tesla Vehicles Will Drive Themselves in Two Years, December 2015. Available online: http://fortune.com/2015/12/21/elon-musk-interview/ (accessed on 6 June 2021).
- Wikipedia. Self-Driving Car. 2021. Available online: https://en.wikipedia.org/wiki/Self-driving_car (accessed on 6 June 2021).
- Lee, T. Waymo Finally Launches an Actual Public, Driverless Taxi Service, October 2020. Available online: https://arstechnica.com/cars/2020/10/waymo-finally-launches-an-actual-public-driverless-taxi-service/ (accessed on 6 July 2021).
- Eriksson, A.; Stanton, N.A. Takeover time in highly automated vehicles: Noncritical transitions to and from manual control. Hum. Factors 2017, 59, 689–705. [Google Scholar] [CrossRef]
- Robert, L.P. Are automated vehicles safer than manually driven cars? AI Soc. 2019, 34, 687–688. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Sun, D.; Zhao, M.; Chen, J.; Liu, Z.; Cheng, S.; Chen, T. MPC-based switched driving model for human vehicle co-piloting considering human factors. Transp. Res. Part C Emerg. Technol. 2020, 115, 102612. [Google Scholar] [CrossRef]
- Clark, J.R.; Stanton, N.A.; Revell, K.M. Conditionally and highly automated vehicle handover: A study exploring vocal communication between two drivers. Transp. Res. Part F Traffic Psychol. Behav. 2018, 65, 699–715. [Google Scholar] [CrossRef] [Green Version]
- Jayaraman, S.K.; Creech, C.; Robert, L.P., Jr.; Tilbury, D.M.; Yang, X.J.; Pradhan, A.K.; Tsui, K.M. Trust in AV: An uncertainty reduction model of AV-pedestrian interactions. In Proceedings of the Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 133–134. [Google Scholar]
- Rasouli, A.; Tsotsos, J.K. Autonomous vehicles that interact with pedestrians: A survey of theory and practice. IEEE Trans. Intell. Transp. Syst. 2019, 21, 900–918. [Google Scholar] [CrossRef] [Green Version]
- Reig, S.; Norman, S.; Morales, G.C.; Das, S.; Steinfeld, A.; Forlizzi, J. A field study of pedestrians and autonomous vehicles. In Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Toronto, ON, Canada, 23–25 September 2018; pp. 198–209. [Google Scholar]
- Robert, L.P. The future of pedestrian-automated vehicle interactions. XRDS Crossroads 2019, 25, 30–33. [Google Scholar] [CrossRef]
- Jayaraman, S.K.; Robert, L.P.; Yang, X.J.; Tilbury, D.M. Multimodal hybrid pedestrian: A hybrid automaton model of urban pedestrian behavior for automated driving applications. IEEE Access 2021, 9, 27708–27722. [Google Scholar] [CrossRef]
- Jayaraman, S.K.; Creech, C.; Tilbury, D.M.; Yang, X.J.; Pradhan, A.K.; Tsui, K.M.; Robert, L.P., Jr. Pedestrian trust in automated vehicles: Role of traffic signal and AV driving behavior. Front. Robot. AI 2019, 6, 117. [Google Scholar] [CrossRef] [Green Version]
- Sucha, M.; Dostal, D.; Risser, R. Pedestrian-driver communication and decision strategies at marked crossings. Accid. Anal. Prev. 2017, 102, 41–50. [Google Scholar] [CrossRef] [Green Version]
- Mahadevan, K.; Somanath, S.; Sharlin, E. Can interfaces facilitate communication in autonomous vehicle-pedestrian interaction? In Proceedings of the Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 309–310. [Google Scholar]
- Lundgren, V.M.; Habibovic, A.; Andersson, J.; Lagström, T.; Nilsson, M.; Sirkka, A.; Saluäär, D. Will There Be New Communication Needs when Introducing Automated Vehicles to the Urban Context? In Proceedings of the Advances in Human Aspects of Transportation, in Advances in Intelligent Systems and Computing, Los Angeles, CA, USA, 16–20 July; Stanton, N., Landry, S., Di Bucchianico, G., Vallicelli, A., Eds.; Springer: Cham, Switzerland, 2017; Volume 484, pp. 485–497. [Google Scholar]
- Rothenbücher, D.; Li, J.; Sirkin, D.; Mok, B.; Ju, W. Ghost driver: A field study investigating the interaction between pedestrians and driverless vehicles. In Proceedings of the 2016 25th IEEE International Symposium on Robot and Human Interactive Communication, New York, NY, USA, 26–31 August 2016; pp. 795–802. [Google Scholar]
- Chang, Y.M.; Wang, L.L. The Visual Power of the Dashboard of a Passenger Car by Applying Eye-Tracking Theory; SAE Technical Paper, No. 2007-01-0425; SAE International: Warrendale, PA, USA, 2007. [Google Scholar]
- Zhang, Q.; Yang, X.J.; Robert, L.P. Driver’s age and automated vehicle explanations. Sustainability 2021, 13, 1948. [Google Scholar] [CrossRef]
- Banjanovic-Mehmedovic, L.; Halilovic, E.; Bosankic, I.; Kantardzic, M.; Kasapovic, S. Autonomous vehicle-to-vehicle (V2V) decision making in roundabout using game theory. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 292–298. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Vlantis, P.; Kyriakopoulos, K.J. Coordination of multiple robotic vehicles in obstacle-cluttered environments. Robotics 2021, 10, 75. [Google Scholar] [CrossRef]
- Soni, A.; Hu, H. Formation control for a fleet of autonomous ground vehicles: A survey. Robotics 2018, 7, 67. [Google Scholar] [CrossRef] [Green Version]
- Tabasso, C.; Cichella, V.; Mehdi, S.B.; Marinho, T.; Hovakimyan, N. Time coordination and collision avoidance using leader-follower strategies in multi-vehicle missions. Robotics 2021, 10, 34. [Google Scholar] [CrossRef]
- Ohnsman, A. Mobileye Wants to Teach Your Robotic Car to Merge in Heavy Boston Traffic, Jan. 2017. Available online: https://www.forbes.com/sites/alanohnsman/2017/01/13/mobileye-wants-to-teach-your-robotic-car-to-merge-in-heavy-boston-traffic/#7e81da4b41b4 (accessed on 6 June 2021).
- Kuipers, B. Toward morality and ethics for robots. In Proceedings of the 2016 AAAI Spring Symposium on Ethical and Moral Considerations in Non-Human Agents, Palo Alto, CA, USA; 2016; pp. 236–241. [Google Scholar]
- Wang, C.; Gu, J.; Terken, J.; Hu, J. Driver-to-Driver Communication on the Highway: What Drivers Want, in Ambient Intelligence; Aarts, E., de Ruyter, B., Eds.; Springer: Cham, Switzerland, 2014; pp. 315–332. [Google Scholar]
- Liang, T.-P.; Robert, L.P.; Suprateek, S.; Christy, C.; Matt, C.; Trenz, M.; Turel, O. Artificial intelligence and robots in individuals’ lives: How to align technological possibilities and ethical issues. Internet Res. 2021, 31, 1–10. [Google Scholar] [CrossRef]
- Calvert, S.; Mahmassani, H.; Meier, J.; Varaiya, N.; Hamdar, P.S.; Chen, D.; Mattingly, S.P. Traffic Flow of Connected and Automated Vehicles: Challenges and Opportunities. In Road Vehicle Automation 4; Meyer, G., Beiker, S., Eds.; Springer: Cham, Switzerland, 2018; pp. 235–245. [Google Scholar]
- Redshaw, S. In the Company of Cars: Driving as a Social and Cultural Practice; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Straub, E.R.; Schaefer, K.E. It takes two to tango: Automated vehicles and human beings do the dance of driving—Four social considerations for policy. Transp. Res. Part A Policy Pract. 2019, 122, 173–183. [Google Scholar] [CrossRef]
- Brown, B.; Laurier, E. The trouble with autopilots: Assisted and autonomous driving on the social road. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA; 2017; pp. 416–429. [Google Scholar]
- Cappelli, P. The missing role of context in OB: The need for a meso-level approach. Organ. Behav. 1991, 13, 55–110. [Google Scholar]
- Mowday, R.T.; Sutton, R.I. Organizational behavior: Linking individuals and groups to organizational contexts. Annu. Rev. Psychol. 1993, 44, 195–229. [Google Scholar] [CrossRef] [PubMed]
- Johns, G. In praise of context. J. Organ. Behav. 2001, 22, 31–42. [Google Scholar] [CrossRef]
- Johns, G. The essential impact of context on organizational behavior. Acad. Manag. Rev. 2006, 31, 386–408. [Google Scholar] [CrossRef]
- Rousseau, D.M.; Fried, Y. Location, location, location: Contextualizing organizational research. J. Organ. Behav. 2001, 22, 1–13. [Google Scholar] [CrossRef]
- Hong, W.; Chan, F.K.; Thong, J.Y.; Chasalow, L.C.; Dhillon, G. A framework and guidelines for context-specific theorizing in information systems research. Inf. Syst. Res. 2014, 25, 111–136. [Google Scholar] [CrossRef]
- Whetten, D.A. An examination of the interface between context and theory applied to the study of Chinese organizations. Manag. Organ. Rev. 2009, 5, 29–56. [Google Scholar] [CrossRef]
- Härtel, C.E.; O’Connor, J.M. Contextualizing research: Putting context back into organizational behavior research. J. Manag. Organ. 2014, 20, 417–422. [Google Scholar] [CrossRef]
- Schneider, B. Interactional psychology and organizational behavior. Res. Organ. Behav. 1983, 5, 1–31. [Google Scholar]
- Anderies, J.M.; Janssen, M.A.; Ostrom, E. A framework to analyze the robustness of social-ecological systems from an institutional perspective. Ecol. Soc. 2004, 9, 1. Available online: http://www.ecologyandsociety.org/vol9/iss1/art18/ (accessed on 6 June 2021). [CrossRef]
- Berkes, F.; Folke, C.; Colding, J. Linking Social and Ecological Systems: Management Practices and Social Mechanisms for Building Resilience; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Bronfenbrenner, U. The Ecology of Human Development; Harvard University Press: Cambridge, MA, USA, 1979. [Google Scholar]
- McGinnis, M.D.; Ostrom, E. Social-ecological system framework: Initial changes and continuing challenges. Ecol. Soc. 2014, 19. [Google Scholar] [CrossRef] [Green Version]
- Ostrom, E. A general framework for analyzing sustainability of social-ecological systems. Science 2009, 325, 419–422. [Google Scholar] [CrossRef]
- Folke, C.; Hahn, T.; Olsson, P.; Norberg, J. Adaptive governance of social-ecological systems. Annu. Rev. Environ. Resour. 2005, 30, 441–473. [Google Scholar] [CrossRef] [Green Version]
- Trimbath, S. Transportation Infrastructure: Paving the Way; STP Advisory Services Working Paper, STP2011_01; STP Advisory Services: Bellevue, NE, USA, 2021. [Google Scholar]
- Kahan, D.M. Gentle nudges vs. hard shoves: Solving the sticky norms problem. Univ. Chic. Law Rev. 2000, 67, 607–645. [Google Scholar] [CrossRef] [Green Version]
- Atchley, P.; Hadlock, C.; Lane, S. Stuck in the 70s: The role of social norms in distracted driving. Accid. Anal. Prev. 2012, 48, 279–284. [Google Scholar] [CrossRef] [PubMed]
- Rakotonirainy, A.; Schroeter, R.; Soro, A. Three social car visions to improve driver behavior. Pervasive Mob. Comput. 2014, 14, 147–160. [Google Scholar] [CrossRef] [Green Version]
- Fruhen, L.S.; Flin, R. Car driver attitudes, perceptions of social norms and aggressive driving behaviour towards cyclists. Accid. Anal. Prev. 2015, 83, 162–170. [Google Scholar] [CrossRef]
- Nemme, H.E.; White, K.M. Texting while driving: Psychosocial influences on young people’s texting intentions and behavior. Accid. Anal. Prev. 2010, 42, 1257–1265. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Riaz, F.; Jabbar, S.; Sajid, M.; Ahmad, M.; Naseer, K.; Ali, N. A collision avoidance scheme for autonomous vehicles inspired by human social norms. Comput. Electr. Eng. 2018, 69, 690–704. [Google Scholar] [CrossRef]
- Lajunen, T.; Corry, A.; Summala, A.; Hartley, L. Cross-cultural differences in drivers’ self-assessments of their perceptual-motor and safety skills: Australians and Finns. Personal. Individ. Differ. 1998, 24, 539–550. [Google Scholar] [CrossRef]
- Liao, Y.; Wang, M.; Duan, L.; Chen, F. Cross-regional driver–vehicle interaction design: An interview study on driving risk perceptions, decisions, and ADAS function preferences. IET Intell. Transp. Syst. 2018, 12, 801–808. [Google Scholar] [CrossRef]
- Nordfjærn, T.; Rundmo, T. Perceptions of traffic risk in an industrialised and a developing country. Transp. Res. Part F Traffic Psychol. Behav. 2009, 12, 91–98. [Google Scholar] [CrossRef]
- Özkan, T.; Lajunen, T.; Chliaoutakis, J.E.; Parker, D.; Summala, H. Cross-cultural differences in driving behaviours: A comparison of six countries. Transp. Res. Part F Traffic Psychol. Behav. 2006, 9, 227–242. [Google Scholar] [CrossRef]
- Yang, J.; Du, F.; Qu, W.; Gong, Z.; Sun, X. Effects of personality on risky driving behavior and accident involvement for Chinese drivers. Traffic Inj. Prev. 2013, 14, 565–571. [Google Scholar] [CrossRef]
- Lin, J.; Niemeier, D.A. Regional driving characteristics, regional driving cycles. Transp. Res. Part D Transp. Environ. 2003, 8, 361–381. [Google Scholar] [CrossRef]
- Rakauskas, M.E.; Ward, N.J.; Gerberich, S.G. Identification of differences between rural and urban safety cultures. Accid. Anal. Prev. 2009, 41, 931–937. [Google Scholar] [CrossRef] [PubMed]
- Tageldin, A.; Sayed, T. Models to evaluate the severity of pedestrian-vehicle conflicts in five cities. Transp. A Transp. Sci. 2017, 15, 354–375. [Google Scholar] [CrossRef]
- Brewer, R.N.; Kameswaran, V. Understanding the power of control in autonomous vehicles for people with vision impairment. In Proceedings of the 20th International ACM SIGACCESS Conference on Computers and Accessibility, Galway, Ireland, 22–24 October 2018; pp. 185–197. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).




{kind=link}