
Extinctions in a Metapopulation with Nonlinear Dispersal Coupling



Abstract
:1. Introduction
2. Materials and Methods
3. Two-Patch System
4. Multi-Patch System
4.1. Existence and Uniqueness, Steady-State Points
4.2. Solutions as a Monotone Dynamical System
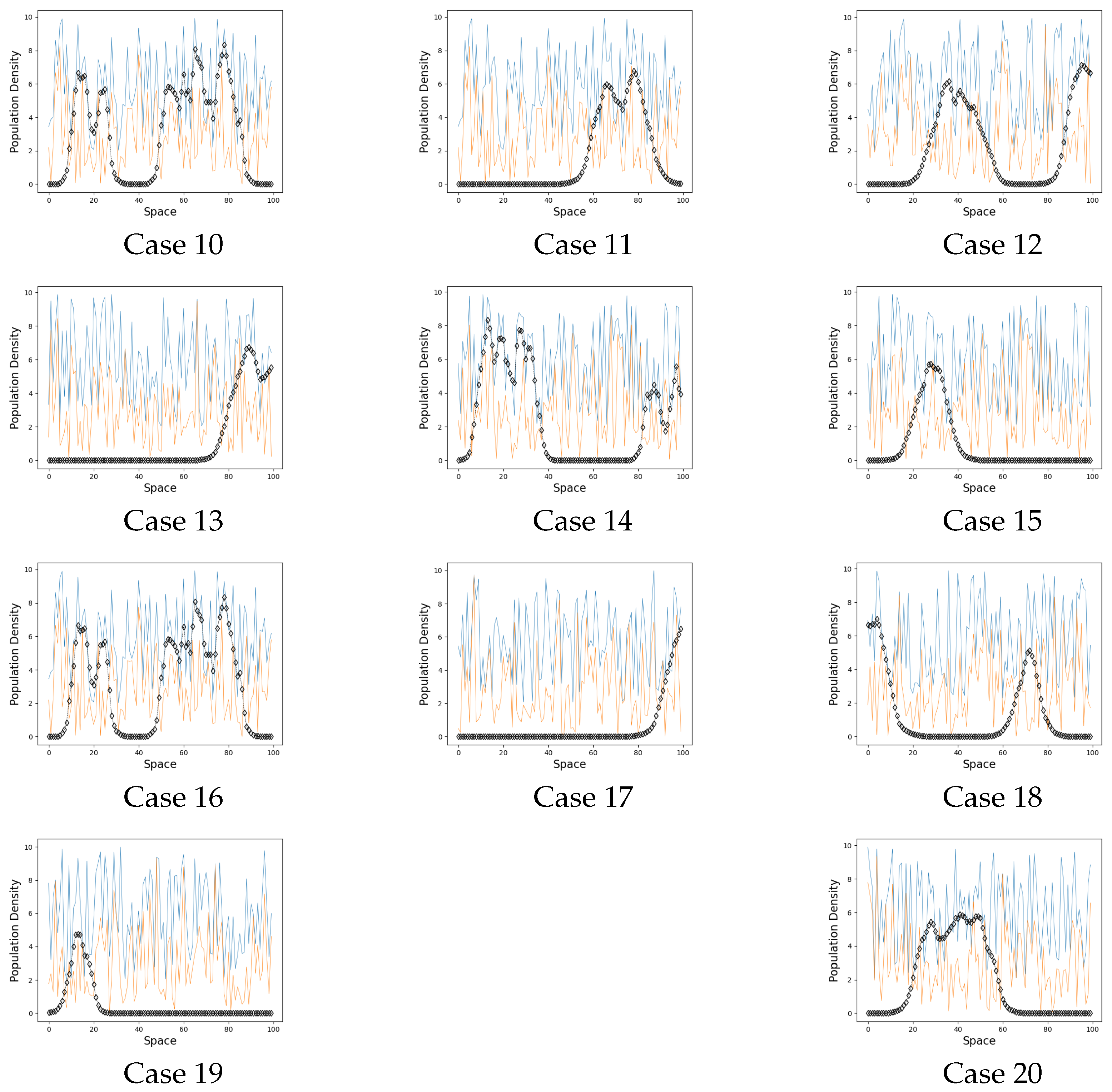
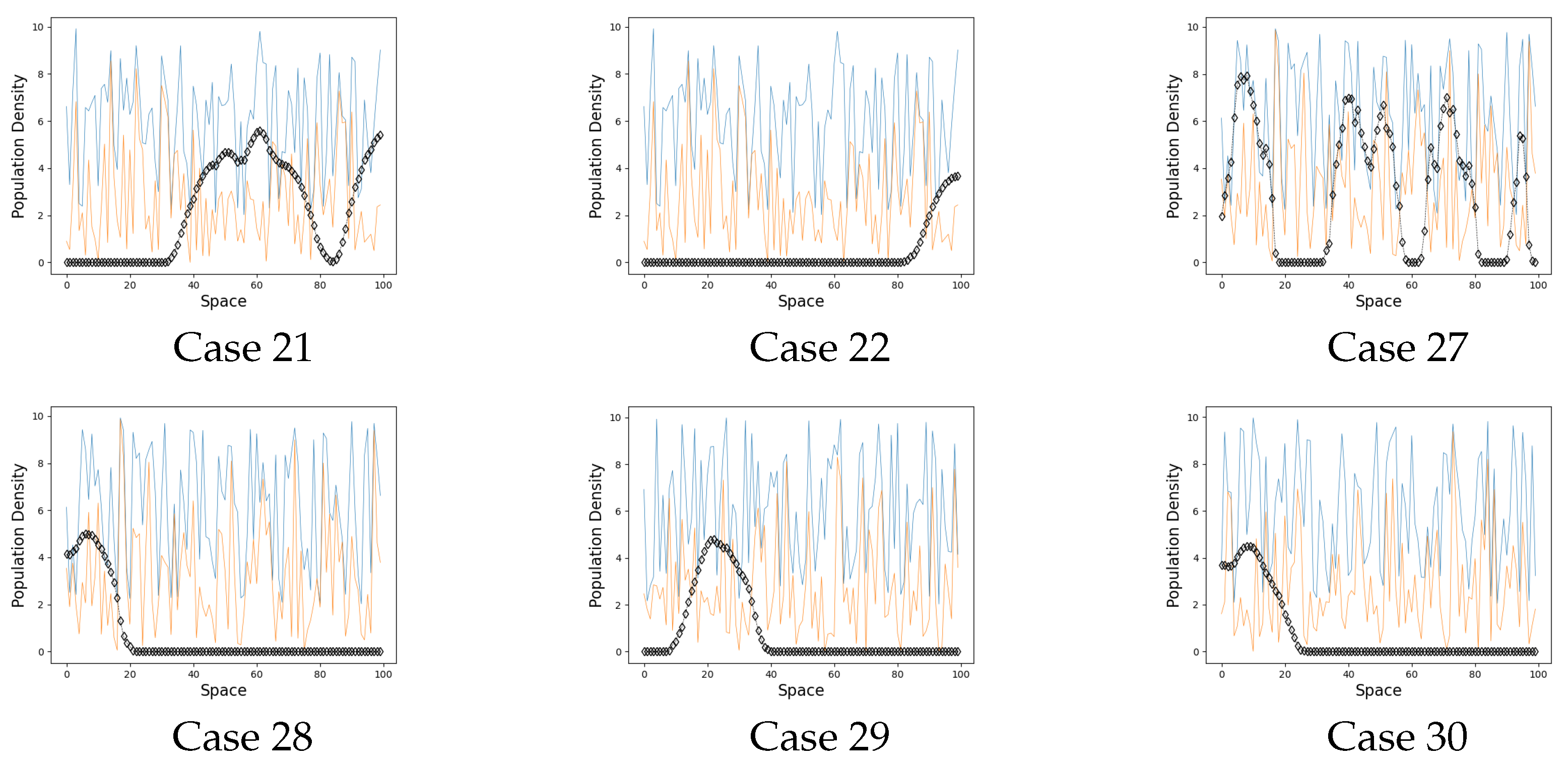
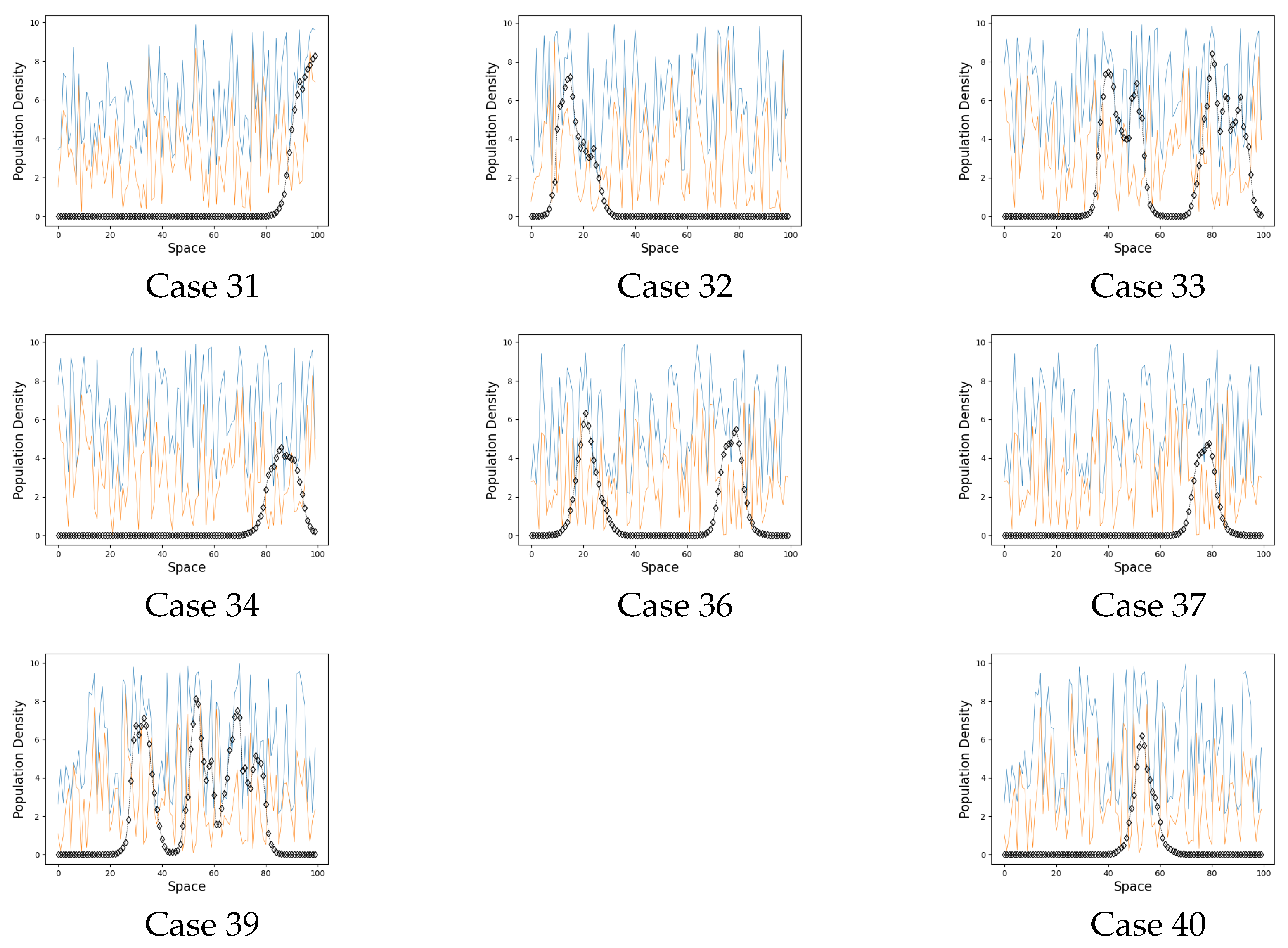
5. Computer Simulations
6. Discussion and Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ehrlich, P.R.; Ehrlich, A.H. Extinction: The Causes and Consequences of the Disappearance of Species; Ballantine Books: New York, NY, USA, 1985. [Google Scholar]
- Keith, D.A.; Akçakaya, H.R.; Thuiller, W.; Midgley, G.F.; Pearson, R.G.; Phillips, S.J.; Regan, H.M.; Araújo, M.B.; Rebelo, T.G. Predicting extinction risks under climate change: Coupling stochastic population models with dynamic bioclimatic habitat models. Biol. Lett. 2008, 4, 560–563. [Google Scholar] [CrossRef] [PubMed]
- Brooks, T.M.; Mittermeier, R.A.; Mittermeier, C.G.; Da Fonseca, G.A.B.; Rylands, A.B.; Konstant, W.R.; Flick, P.; Pilgrim, J.; Oldfield, S.; Magin, G.; et al. Habitat Loss and Extinction in the Hotspots of Biodiversity. Conserv. Biol. 2002, 16, 909–923. [Google Scholar] [CrossRef]
- Tilman, D.; May, R.M.; Lehman, C.L.; Nowak, M.A. Habitat destruction and the extinction debt. Nature 1994, 371, 65–66. [Google Scholar] [CrossRef]
- Fahrig, L. Relative Effects of Habitat Loss and Fragmentation on Population Extinction. J. Wildl. Manag. 1997, 61, 603–610. [Google Scholar] [CrossRef]
- Wilcox, B.A.; Murphy, D.D. Conservation Strategy: The Effects of Fragmentation on Extinction. Am. Nat. 1985, 125, 879–887. [Google Scholar] [CrossRef]
- Kimura, M. “Stepping Stone” model of population. Ann. Rept. Nat. Inst. Genet. 1953, 3, 62–63. [Google Scholar]
- Renshaw, E. A survey of stepping-stone models in population dynamics. Adv. Appl. Probab. 1986, 18, 581–627. [Google Scholar] [CrossRef]
- Cox, J.T.; Durrett, R. The stepping stone model: New formulas expose old myths. Ann. Appl. Probab. 2002, 12, 1348–1377. [Google Scholar] [CrossRef]
- Jansen, V.A.; Lloyd, A.L. Local stability analysis of spatially homogeneous solutions of multi-patch systems. J. Math. Biol. 2000, 41, 232–252. [Google Scholar] [CrossRef]
- DeAngelis, D.; Zhang, B.; Ni, W.M.; Wang, Y. Carrying Capacity of a Population Diffusing in a Heterogeneous Environment. Mathematics 2020, 8, 49. [Google Scholar] [CrossRef]
- Kareiva, P.; Mullen, A.; Southwood, R. Population Dynamics in Spatially Complex Environments: Theory and Data [and Discussion]. Philos. Trans. Biol. Sci. 1990, 330, 175–190. [Google Scholar]
- Nisbet, R.; Briggs, C.; Gurney, W.; Murdoch, W.; Stewart-Oaten, A. Two-patch metapopulation dynamics. In Patch Dynamics; Springer: Berlin/Heidelberg, Germany, 1993; pp. 125–135. [Google Scholar]
- Blasius, B.; Huppert, A.; Stone, L. Complex dynamics and phase synchronization in spatially extended ecological systems. Nature 1999, 399, 354–359. [Google Scholar] [CrossRef] [PubMed]
- Solé, R.V.; Gamarra, J.G. Chaos, Dispersal and Extinction in Coupled Ecosystems. J. Theor. Biol. 1998, 193, 539–541. [Google Scholar] [CrossRef] [PubMed]
- McCann, K.; Hastings, A.; Harrison, S.; Wilson, W. Population Outbreaks in a Discrete World. Theor. Popul. Biol. 2000, 57, 97–108. [Google Scholar] [CrossRef]
- Amarasekare, P. Allee Effects in Metapopulation Dynamics. Am. Nat. 1998, 152, 298–302. [Google Scholar] [CrossRef]
- Levins, R. Some Demographic and Genetic Consequences of Environmental Heterogeneity for Biological Control1. Bull. Entomol. Soc. Am. 1969, 15, 237–240. [Google Scholar] [CrossRef]
- Levins, R. Extinction. Lectures on Mathmatics in the Life Sciences; American Mathematical Society: Providence, RI, USA, 1970; pp. 77–107. [Google Scholar]
- Pires, M.A.; Duarte Queirós, S.M. Optimal dispersal in ecological dynamics with Allee effect in metapopulations. PLoS ONE 2019, 14, e0218087. [Google Scholar] [CrossRef]
- Wang, W. Population dispersal and Allee effect. Ric. Mat. 2016, 65, 535–548. [Google Scholar] [CrossRef]
- Hanski, I. Metapopulation Ecology; Oxford University Press: Oxford, UK, 1999. [Google Scholar]
- Moran, P.A.P. The statistical analysis of the Canadian Lynx cycle. Aust. J. Zool. 1953, 1, 291–298. [Google Scholar] [CrossRef]
- Royama, T. Analytical Population Dynamics; Chapman & Hall: London, UK, 1992. [Google Scholar]
- Namba, T.; Umemoto, A.; Minami, E. The Effects of Habitat Fragmentation on Persistence of Source–Sink Metapopulations in Systems with Predators and Prey or Apparent Competitors. Theor. Popul. Biol. 1999, 56, 123–137. [Google Scholar] [CrossRef]
- Hanski, I.; Ovaskainen, O. The metapopulation capacity of a fragmented landscape. Nature 2000, 404, 755–758. [Google Scholar] [CrossRef] [PubMed]
- Allen, J.C.; Schaffer, W.M.; Rosko, D. Chaos reduces species extinction by amplifying local population noise. Nature 1993, 364, 229–232. [Google Scholar] [CrossRef] [PubMed]
- Roughgarden, J.; Iwasa, Y. Dynamics of a metapopulation with space-limited subpopulations. Theor. Popul. Biol. 1986, 29, 235–261. [Google Scholar] [CrossRef]
- Bodin, O.; Saura, S. Ranking individual habitat patches as connectivity providers: Integrating network analysis and patch removal experiments. Ecol. Model. 2010, 221, 2393–2405. [Google Scholar] [CrossRef]
- Urban, D.; Keitt, T. Landscape Connectivity: A Graph-Theoretic Perspective. Ecology 2001, 82, 1205–1218. [Google Scholar] [CrossRef]
- Kininmonth, S.; Drechsler, M.; Johst, K.; Possingham, H.P. Metapopulation mean life time within complex networks. Mar. Ecol. Prog. Ser. 2010, 417, 139–149. [Google Scholar] [CrossRef]
- With, K.A.; King, A.W. Extinction Thresholds for Species in Fractal Landscapes. Conserv. Biol. 1999, 13, 314–326. [Google Scholar] [CrossRef]
- Harrison, S.; Quinn, J.F. Correlated Environments and the Persistence of Metapopulations. Oikos 1989, 56, 293–298. [Google Scholar] [CrossRef]
- Legendre, S.; Schoener, T.W.; Clobert, J.; Spiller, D.A. How Is Extinction Risk Related to Population-Size Variability over Time? A Family of Models for Species with Repeated Extinction and Immigration. Am. Nat. 2008, 172, 282–298. [Google Scholar] [CrossRef]
- Croteau, E.K. Causes and Consequences of Dispersal in Plants and Animals. Nat. Educ. Knowl. 2010, 3, 12. [Google Scholar]
- Travis, J.M.J.; Delgado, M.; Bocedi, G.; Baguette, M.; Bartoń, K.; Bonte, D.; Boulangeat, I.; Hodgson, J.A.; Kubisch, A.; Penteriani, V.; et al. Dispersal and species’ responses to climate change. Oikos 2013, 122, 1532–1540. [Google Scholar] [CrossRef]
- Edelstein-Keshet, L. Mathematical Models in Biology; McGraw-Hill: New York, NY, USA, 1988. [Google Scholar]
- Murray, J. Mathematical Biology; Springer: Berlin/Heidelberg, Germany, 1989. [Google Scholar]
- Kot, M. Elements of Mathematical Ecology; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Dennis, B. Allee Effects: Population Growth, Critical Density, and the Chance of Extinction. Nat. Resour. Model. 1989, 3, 481–538. [Google Scholar] [CrossRef]
- Stephens, P.A.; Sutherland, W.J. Consequences of the Allee effect for behaviour, ecology and conservation. Trends Ecol. Evol. 1999, 14, 401–405. [Google Scholar] [CrossRef] [PubMed]
- Lidicker, W. The Allee Effect: Its History and Future Importance. Open Ecol. J. 2010, 3, 71–82. [Google Scholar] [CrossRef]
- Berec, L. Allee effects under climate change. Oikos 2019, 128, 972–983. [Google Scholar] [CrossRef]
- Courchamp, F.; Berek, L.; Gascoigne, J. Allee Effects in Ecology and Conservation; Oxford University Press: Oxford, MA, USA, 2008. [Google Scholar]
- Lewis, M.; Kareiva, P. Allee Dynamics and the Spread of Invading Organisms. Theor. Popul. Biol. 1993, 43, 141–158. [Google Scholar] [CrossRef]
- Keitt, T.H.; Lewis, M.A.; Holt, R.D. Allee Effects, Invasion Pinning, and Species’ Borders. Am. Nat. 2001, 157, 203–216. [Google Scholar] [CrossRef]
- Boukal, D.S.; Berec, L. Single-species Models of the Allee Effect: Extinction Boundaries, Sex Ratios and Mate Encounters. J. Theor. Biol. 2002, 218, 375–394. [Google Scholar] [CrossRef]
- Sun, G.Q. Mathematical modeling of population dynamics with Allee effect. Nonlinear Dyn. 2016, 85, 1–12. [Google Scholar] [CrossRef]
- Petrovskii, S.; Li, B.L. Increased Coupling Between Subpopulations in a Spatially Structured Environment Can Lead to Population Outbreaks. J. Theor. Biol. 2001, 212, 549–562. [Google Scholar] [CrossRef]
- Althagafi, H.; Petrovskii, S. Metapopulation Persistence and Extinction in a Fragmented Random Habitat: A Simulation Study. Mathematics 2021, 9, 2202. [Google Scholar] [CrossRef]
- SciPy Documentation. Available online: https://docs.scipy.org/doc/scipy/reference/generated/scipy.integrate.solve_ivp.html. (accessed on 12 August 2023).
- Vinberg, E. A Course in Algebra, 2nd ed.; Factorial Press: Moscow, Russia, 2001. (In Russian) [Google Scholar]
- Zorich, V.A. Mathematical Analysis I, 2nd ed.; Universitext; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar] [CrossRef]
- Kolmogorov, A.; Fomin, S. Elements of the Theory of Functions and Functional Analysis, 7th ed.; FIZMATLIT: Moscow, Russia, 2004. (In Russian) [Google Scholar]
- Zorich, V.A. Mathematical Analysis II, 2nd ed.; Universitext; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar] [CrossRef]
- Kepley, S.; Zhang, T. A constructive proof of the Cauchy–Kovalevskaya theorem for ordinary differential equations. J. Fixed Point Theory Appl. 2021, 23, 7. [Google Scholar] [CrossRef]
- Zeidler, E. Nonlinear Functional Analysis and its Applications. I: Fixed-Point Theorems; Springer: New York, NY, USA, 1986. [Google Scholar]
- Feltrin, G.; Zanolin, F. Equilibrium points, periodic solutions and the Brouwer fixed point theorem for convex and non-convex domains. J. Fixed Point Theory Appl. 2022, 24, 68. [Google Scholar] [CrossRef]
- Bhatia, N.P.; Szego, G.P. Dynamical Systems: Stability Theory and Applications; Springer: Berlin/Heidelberg, Germany, 1967. [Google Scholar]
- Hirsch, M.W.; Smith, H. Monotone Dynamical Systems; Elsevier: Amsterdam, The Netherlands, 2005; Chapter 4. [Google Scholar]
- Ross, S.M. A First Course in Probability, 8th ed.; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2010. [Google Scholar]
- Seno, H. Effect of a singular patch on population persistence in a multi-patch system. Ecol. Model. 1988, 43, 271–286. [Google Scholar] [CrossRef]
- Ludwig, D.; Jones, D.D.; Holling, C.S. Qualitative Analysis of Insect Outbreak Systems: The Spruce Budworm and Forest. J. Anim. Ecol. 1978, 47, 315–332. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case No. | Model | q | Which | p | ||
|---|---|---|---|---|---|---|
| 1 | Quadratic | 20 | 7Q | 6.0829 | 2.7824 | 0.5180 |
| 2 | Quadratic | 20 | 8Q | 6.3336 | 2.9024 | 0.5287 |
| 3 | Quadratic | 20 | 9Q | 6.1039 | 2.7939 | 0.5161 |
| 4 | Linear | 5 | 1 | 5.9931 | 2.7475 | 0.4981 |
| 5 | Linear | 20 | 1 | 5.9931 | 2.7475 | 0.4981 |
| 6 | Linear | 5 | 5 | 6.1951 | 3.2314 | −0.2678 |
| 7 | Linear | 20 | 5 | 6.1951 | 3.2314 | −0.2678 |
| 8 | Linear | 5 | 6L | 5.8518 | 2.9176 | 0.0166 |
| 9 | Linear | 20 | 6L | 5.8518 | 2.9176 | 0.0166 |
| 10 | Linear | 5 | 9L | 5.9594 | 2.9715 | 0.0163 |
| 11 | Linear | 20 | 9L | 5.9594 | 2.9715 | 0.0163 |
| 12 | Linear | 20 | 10L | 6.1707 | 3.0772 | 0.0162 |
| 13 | Linear | 20 | 11L | 5.9465 | 2.9655 | 0.0155 |
| 14 | Linear | 5 | 13L | 5.9663 | 2.9750 | 0.0163 |
| 15 | Linear | 20 | 13L | 5.9663 | 2.9750 | 0.0163 |
| 16 | Linear | 5 | 14L | 5.7967 | 2.8902 | 0.0164 |
| 17 | Linear | 20 | 14L | 5.7967 | 2.8902 | 0.0164 |
| 18 | Linear | 20 | 15L | 5.8942 | 2.9389 | 0.0165 |
| 19 | Linear | 5 | 17L | 6.1019 | 3.0428 | 0.0163 |
| 20 | Linear | 20 | 17L | 6.1019 | 3.0428 | 0.0163 |
| Case No. | Model | q | Which | p | ||
|---|---|---|---|---|---|---|
| 21 | Quadratic | 5 | 1 | 5.9931 | 2.7475 | 0.4981 |
| 22 | Quadratic | 11.5 | 1 | 5.9931 | 2.7475 | 0.4981 |
| 23 (NI) | Quadratic | 1.5 | 2 | 5.8322 | 3.2905 | −0.7489 |
| 24 (NI) | Quadratic | 0.5 | 3 | 5.9883 | 3.0180 | −0.0477 |
| 25 (NI) | Quadratic | 1 | 3 | 5.9883 | 3.0180 | −0.0477 |
| 26 (NI) | Quadratic | 3.5 | 4 | 6.4793 | 3.2230 | 0.0333 |
| 27 | Quadratic | 0.5 | 5 | 6.1951 | 3.2314 | −0.2678 |
| 28 | Quadratic | 4.5 | 5 | 6.1951 | 3.2314 | −0.2678 |
| 29 | Quadratic | 4.5 | 6Q | 6.0280 | 2.7574 | 0.5132 |
| 30 | Quadratic | 7.5 | 10Q | 6.0660 | 2.7756 | 0.5147 |
| 31 | Linear | 9.5 | 2 | 5.8322 | 3.2905 | −0.7489 |
| 32 | Linear | 5 | 3 | 5.9883 | 3.0180 | −0.0477 |
| 33 | Linear | 5 | 4 | 6.4792 | 3.2230 | 0.0333 |
| 34 | Linear | 13 | 4 | 6.4792 | 3.2230 | 0.0333 |
| 35 (NI) | Linear | 13 | 7L | 5.4677 | 2.7261 | 0.0156 |
| 36 | Linear | 10 | 8L | 5.9101 | 2.9469 | 0.0163 |
| 37 | Linear | 12 | 8L | 5.9101 | 2.9469 | 0.0163 |
| 38 (NI) | Linear | 8.5 | 12L | 5.9783 | 2.9812 | 0.0159 |
| 39 | Linear | 5 | 16L | 5.6687 | 2.8261 | 0.0164 |
| 40 | Linear | 11 | 16L | 5.6687 | 2.8261 | 0.0164 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Korotkov, A.; Petrovskii, S. Extinctions in a Metapopulation with Nonlinear Dispersal Coupling. Mathematics 2023, 11, 4337. https://doi.org/10.3390/math11204337
Korotkov A, Petrovskii S. Extinctions in a Metapopulation with Nonlinear Dispersal Coupling. Mathematics. 2023; 11(20):4337. https://doi.org/10.3390/math11204337
Chicago/Turabian StyleKorotkov, Alexander, and Sergei Petrovskii. 2023. "Extinctions in a Metapopulation with Nonlinear Dispersal Coupling" Mathematics 11, no. 20: 4337. https://doi.org/10.3390/math11204337
APA StyleKorotkov, A., & Petrovskii, S. (2023). Extinctions in a Metapopulation with Nonlinear Dispersal Coupling. Mathematics, 11(20), 4337. https://doi.org/10.3390/math11204337