
A Refined Identification Method for the Hidden Dangers of External Damage in Transmission Lines Based on the Generation of a Vanishing Point-Driven Effective Region

Abstract
:1. Introduction
- (1)
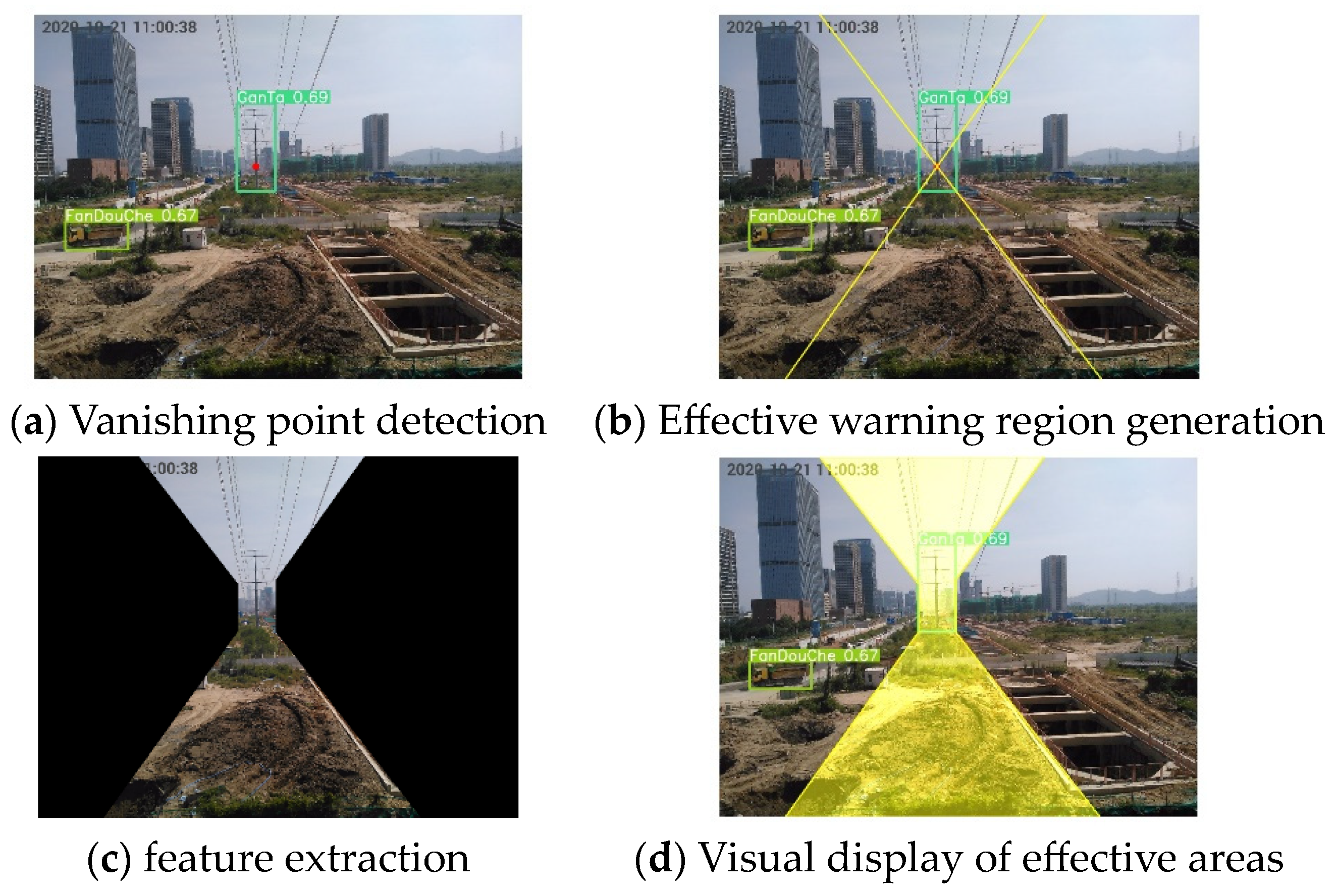
- We proposed an effective early warning region generation method based on the vanishing point driving method, which achieved precise and reliable identification of hidden dangers of external damage in transmission lines.
- (2)
- A scene element perception model for transmission corridors based on slicing-aided hyperinference was proposed to achieve the comprehensive and accurate detection of external damage targets around the scene.
- (3)
- An image vanishing point calculation method based on Canny edge detection and Hough line detection was proposed, which improved the accuracy and robustness of vanishing point calculation.
2. Methodology
2.1. Complexity Analysis of External Damage Scenarios of Transmission Lines
2.2. A Scene Perception Model Based on Slicing Aided Hyper Inference
- (1)
- YOLOv8 model principle
- (2)
- Slicing-aided hyperinference
2.3. An Effective Early Warning Region Generation Method Based on Vanishing Point Driving Technique
- (1)
- Image vanishing point detection algorithm
- (2)
- Effective warning region generation method
3. Results and Discussion
3.1. Data Description and Experimental Environment
3.2. Comprehensive and Accurate Perception of External Damage Targets in Transmission Lines
- (1)
- Ablation experiment
- (2)
- Analysis of YOLOv8x with SAHI model detection performance
3.3. Refined and Reliable Identification of External Damage Accidents in Transmission Lines
- (1)
- Image vanishing point detection
- (2)
- Generation of effective early warning regions driven by the vanishing point
- (3)
- Identification of hidden dangers of external damage to transmission lines
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, B. Fault statistics and analysis of 220-kV and above transmission lines in a southern coastal provincial power grid of China. IEEE Open Access J. Power and Energy 2020, 7, 122–129. [Google Scholar] [CrossRef]
- Yu, C.; Liu, Y.; Zhang, W.; Zhang, X.; Zhang, Y.; Jiang, X. Foreign Objects Identification of Transmission Line Based on Improved YOLOv7; IEEE Access: Piscataway, NJ, USA, 2023. [Google Scholar]
- Zhu, J.; Guo, Y.; Yue, F.; Yuan, H.; Yang, A.; Wang, X.; Rong, M. A deep learning method to detect foreign objects for inspecting power transmission lines. IEEE Access 2020, 8, 94065–94075. [Google Scholar] [CrossRef]
- Lu, J.; Zhou, T.; Wu, C.; Li, B.; Tan, Y.; Zhu, Y. Fault statistics and analysis of 220 kV and above power transmission line in province-level power grid. High Volt. Eng. 2016, 42, 200–207. [Google Scholar]
- Zhang, N.; Kang, C.; Liu, J.; Xin, J.; Wan, J.; Hu, J.; Wei, W. Mid-short-term risk assessment of power systems considering impact of external environment. J. Mod. Power Syst. Clean Energy 2013, 1, 118–126. [Google Scholar] [CrossRef]
- Jones, D.I.; Earp, G.K. Camera sightline pointing requirements for aerial inspection of overhead power lines. Electr. Power Syst. Res. 2001, 57, 73–82. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, X.; Jia, J.; Liu, X. A recognition technology of transmission lines conductor break and surface damage based on aerial image. IEEE Access 2019, 7, 59022–59036. [Google Scholar] [CrossRef]
- Huang, X.; Wu, Y.; Zhang, Y.; Li, B. Structural defect detection technology of transmission line damper based on UAV image. IEEE Trans. Instrum. Meas. 2022, 72, 1–14. [Google Scholar] [CrossRef]
- Qin, X.; Wu, G.; Lei, J.; Fan, F.; Ye, X.; Mei, Q. A novel method of autonomous inspection for transmission line based on cable inspection robot lidar data. Sensors 2018, 18, 596. [Google Scholar] [CrossRef] [PubMed]
- Yang, W.; Huang, J.; Wang, P.; Chen, X.; Zhou, Y.; Su, Q.; Yang, Y.; Quan, H.; Ren, M.; Xia, C. An intelligent distributed sensor developed for power cable external damage monitoring. Procedia Comput. Sci. 2021, 183, 166–174. [Google Scholar] [CrossRef]
- Liu, J.; Huang, H.; Zhang, Y.; Lou, J.; He, J. Deep learning based external-force-damage detection for power transmission line. J. Phys. Conf. Ser. 2019, 1169, 012032. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Zou, H.; Ye, Z.; Sun, J.; Chen, J.; Yang, Q.; Chai, Y. Research on detection of transmission line corridor external force object containing random feature targets. Front. Energy Res. 2024, 12, 1295830. [Google Scholar] [CrossRef]
- Han, G.; He, M.; Zhao, F.; Xu, Z.; Zhang, M.; Qin, L. Insulator detection and damage identification based on improved lightweight YOLOv4 network. Energy Rep. 2021, 7, 187–197. [Google Scholar] [CrossRef]
- Tang, J.; Li, B. Power System to Prevent External Damage Detection Method. Acad. J. Sci. Technol. 2024, 9, 189–193. [Google Scholar] [CrossRef]
- Chen, N.; Li, F.; Wang, S. Research on Power System External Fault Monitoring Techniques Based on Deep Learning. In Proceedings of the 2023 3rd International Conference on Intelligent Power and Systems (ICIPS), Shenzhen, China, 20–22 October 2023; pp. 799–802. [Google Scholar]
- Liu, Z.; Wang, X.; Liu, Y. Application of unmanned aerial vehicle hangar in transmission tower inspection considering the risk probabilities of steel towers. IEEE Access 2019, 7, 159048–159057. [Google Scholar] [CrossRef]
- Huang, R.; Fang, Z.; Ma, Y.; Huang, S.; Wen, G.; Liu, J.; Sun, H. Hidden Danger Area Identification of Outside Force Destroy in Transmission Corridor Based on Change Detection. Spacecr. Recovery Remote Sens. 2022, 43, 138–148. (In Chinese) [Google Scholar]
- Pan, C.; Cao, X.; Wu, D. Power line detection via background noise removal. In Proceedings of the 2016 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Washington, DC, USA, 7–9 December 2016; pp. 871–875. [Google Scholar]
- Akyon, F.C.; Altinuc, S.O.; Temizel, A. Slicing aided hyper inference and fine-tuning for small object detection. In Proceedings of the 2022 IEEE International Conference on Image Processing (ICIP), Bordeaux, France, 16–19 October 2022; pp. 966–970. [Google Scholar]
- Zhao, A.; Lv, H.; Wang, Y.; Li, H.; Li, Y.; Zou, G. Research on External Damage Detection of Transmission Line in Complex Background. In Proceedings of the 2023 2nd International Conference on Robotics, Artificial Intelligence and Intelligent Control (RAIIC), Mianyang, China, 11–13 August 2023; pp. 171–174. [Google Scholar]
- Wang, X.; Gao, H.; Jia, Z.; Li, Z. BL-YOLOv8: An improved road defect detection model based on YOLOv8. Sensors 2023, 23, 8361. [Google Scholar] [CrossRef] [PubMed]
- He, M.; Qin, L.; Deng, X.; Liu, K. MFI-YOLO: Multi-fault insulator detection based on an improved YOLOv8. In IEEE Transactions on Power Delivery; IEEE: Piscataway, NJ, USA, 2023. [Google Scholar]
- Lee, S.; Kim, J.; Yoon, J.S.; Shin, S.; Bailo, O.; Kim, N.; Lee, T.-H.; Hong, H.S.; Han, S.-H.; Kweon, I.S. Vpgnet: Vanishing point guided network for lane and road marking detection and recognition. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 1947–1955. [Google Scholar]
- Li, X.; Zhu, L.; Yu, Z.; Guo, B.; Wan, Y. Vanishing point detection and rail segmentation based on deep multi-task learning. IEEE Access 2020, 8, 163015–163025. [Google Scholar] [CrossRef]
- Zhang, J.; Xing, W.; Xing, M.; Sun, G. Terahertz image detection with the improved faster region-based convolutional neural network. Sensors 2018, 18, 2327. [Google Scholar] [CrossRef] [PubMed]
- Duda, R.O.; Hart, P.E. Use of the Hough transformation to detect lines and curves in pictures. Commun. ACM 1972, 15, 11–15. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration Name | Specific Information |
|---|---|
| Server type | DELL Precision T5820 GPU server |
| CPU | i9-10980XE, 18 cores, 3.0 GHz |
| GPU | 2*RTX3090, 24 GB |
| RAM | 128 GB |
| Hard disk | 10 T, solid state drive |
| Target Type | mAP (%) | |
|---|---|---|
| YOLOv7 | Detection Methods in This Paper | |
| Crane | 65.5 | 81.5 |
| Tower crane | 72.4 | 83.4 |
| Cement pump truck | 66.7 | 79.9 |
| Bulldozer | 81.5 | 88.2 |
| Soil compactor | 65.5 | 78.6 |
| Excavator | 82.5 | 86.6 |
| Dumper | 75.1 | 83.0 |
| Transmission tower | 81.2 | 88.9 |
| Smoke | 73.3 | 76.3 |
| Total | 73.7 | 82.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, F.; Liu, H.; Wang, J.; Jia, R.; Wang, B.; Ma, H. A Refined Identification Method for the Hidden Dangers of External Damage in Transmission Lines Based on the Generation of a Vanishing Point-Driven Effective Region. Processes 2024, 12, 1904. https://doi.org/10.3390/pr12091904
Ma F, Liu H, Wang J, Jia R, Wang B, Ma H. A Refined Identification Method for the Hidden Dangers of External Damage in Transmission Lines Based on the Generation of a Vanishing Point-Driven Effective Region. Processes. 2024; 12(9):1904. https://doi.org/10.3390/pr12091904
Chicago/Turabian StyleMa, Fuqi, Heng Liu, Jiaxun Wang, Rong Jia, Bo Wang, and Hengrui Ma. 2024. "A Refined Identification Method for the Hidden Dangers of External Damage in Transmission Lines Based on the Generation of a Vanishing Point-Driven Effective Region" Processes 12, no. 9: 1904. https://doi.org/10.3390/pr12091904