
Design and Analysis of Small Fallen Leaf Collection, Crushing, and Recycling Vehicle


Abstract
:1. Introduction
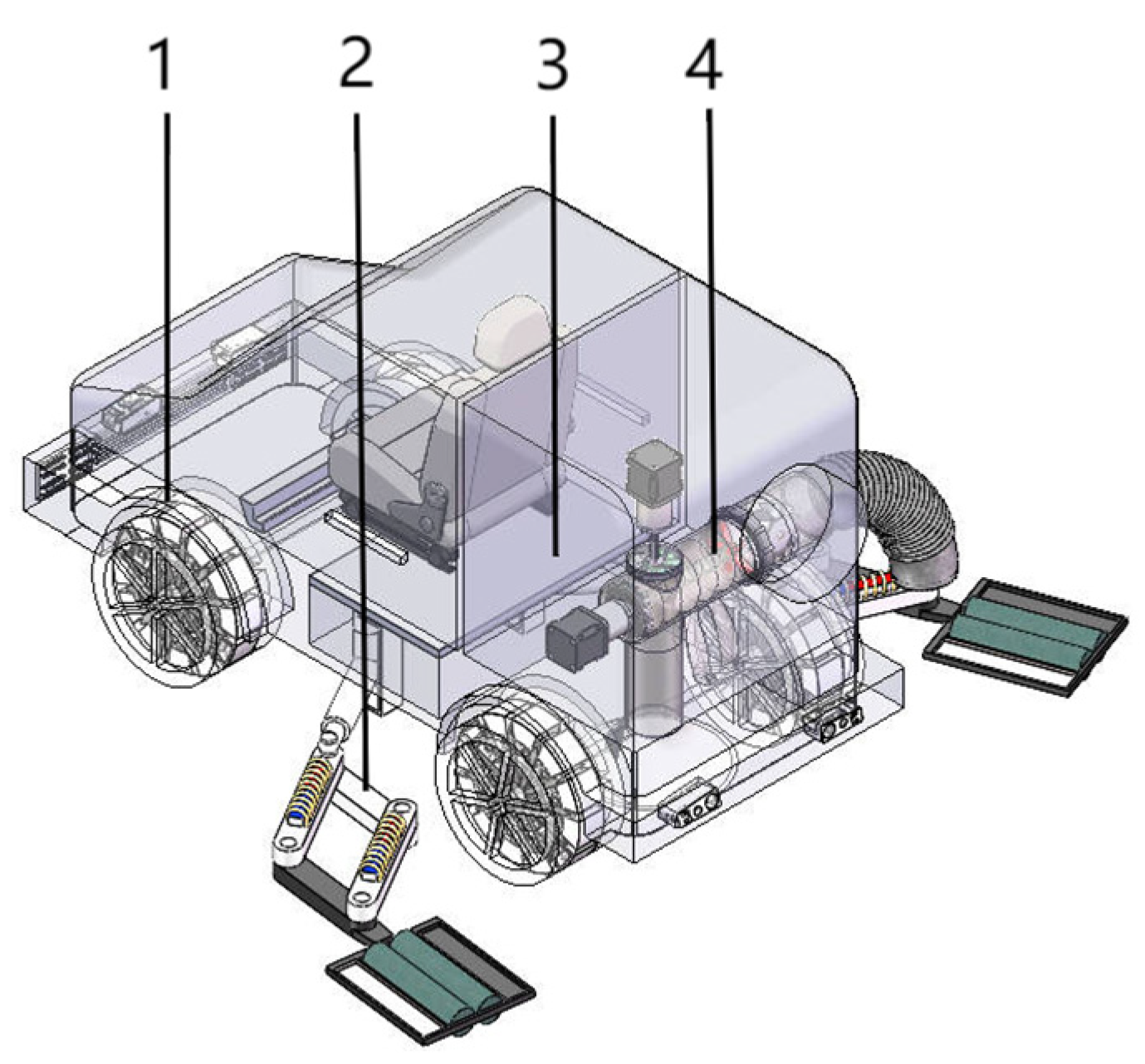
2. Fallen Leaf Recycling Vehicle Design
3. Structural Design and Analysis of Small Leaf Litter Collection, Crushing and Recycling Vehicle
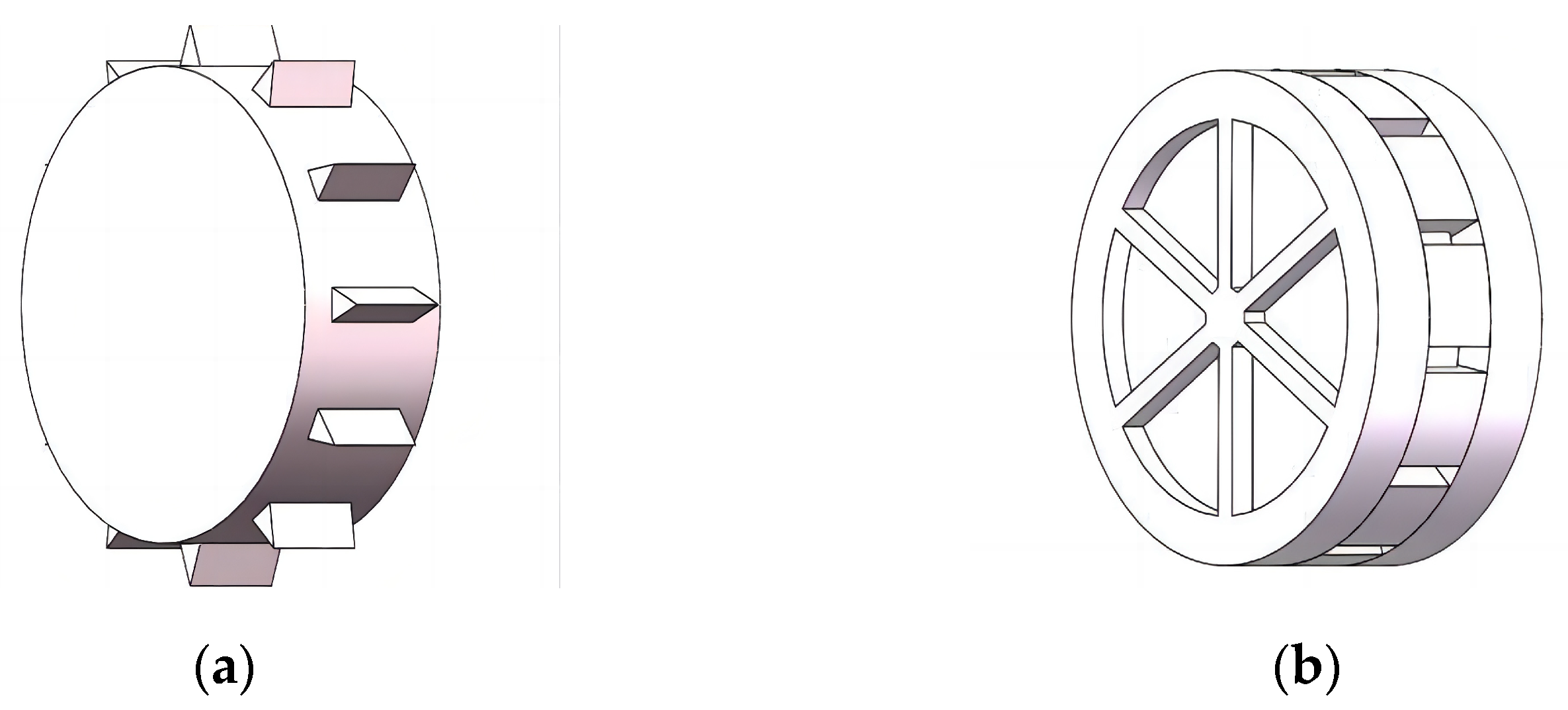
3.1. Retractable Hob Wheel
3.1.1. Design of Retractable Hob Wheel
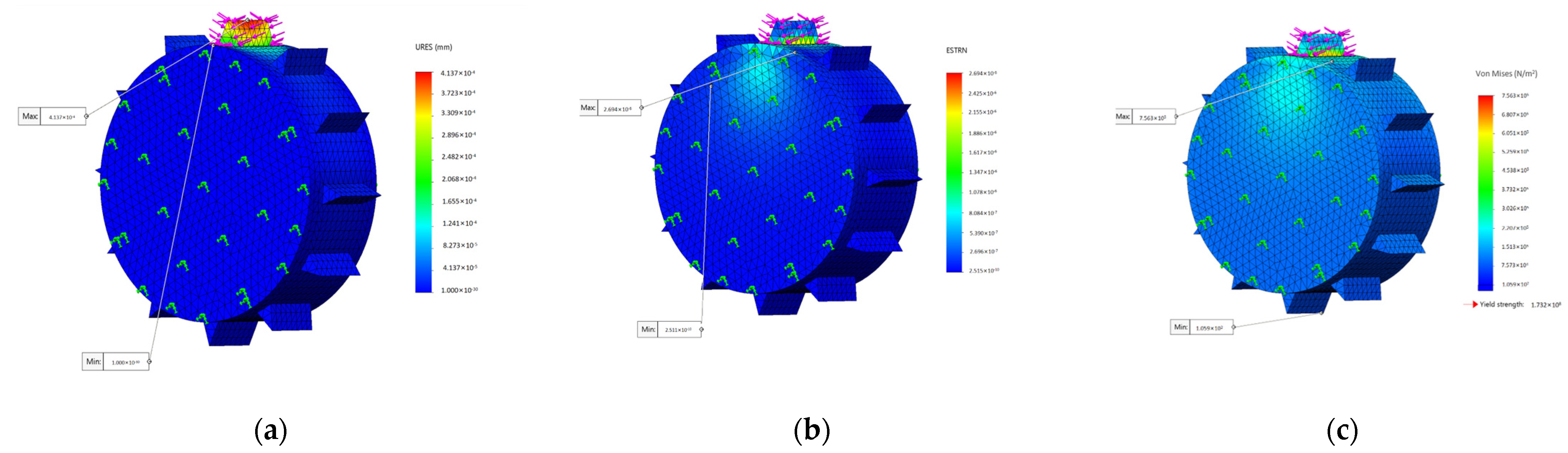
3.1.2. Static Analysis of Wheel
3.2. Retractable Collection Brush
3.2.1. Design of Retractable Collection Brush
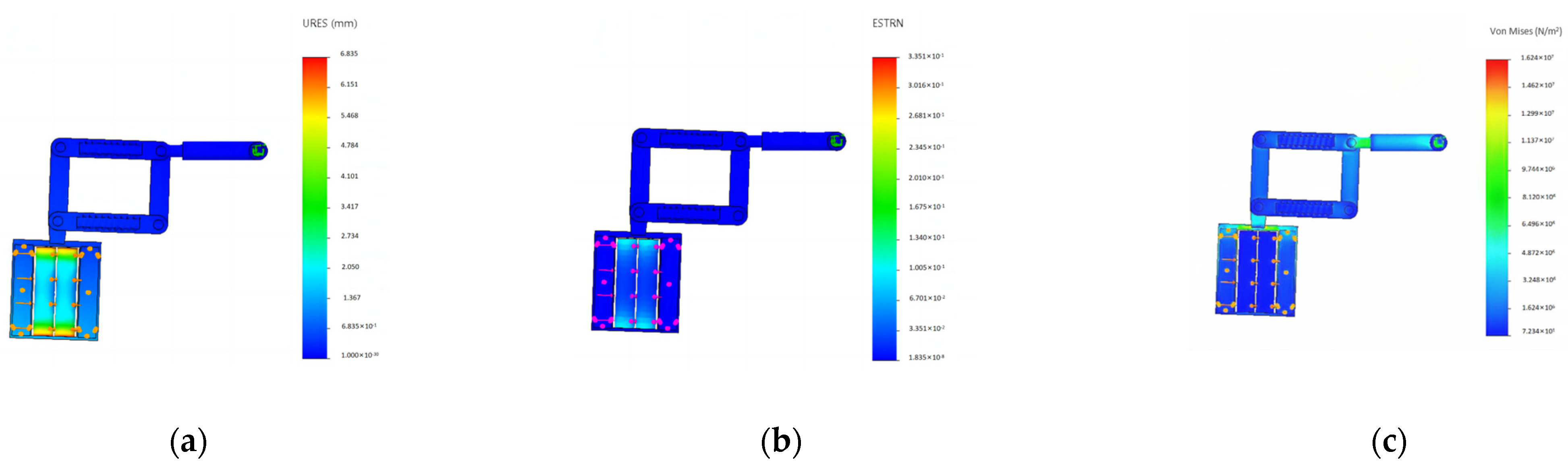
3.2.2. Static Analysis of Retractable Collection Brush
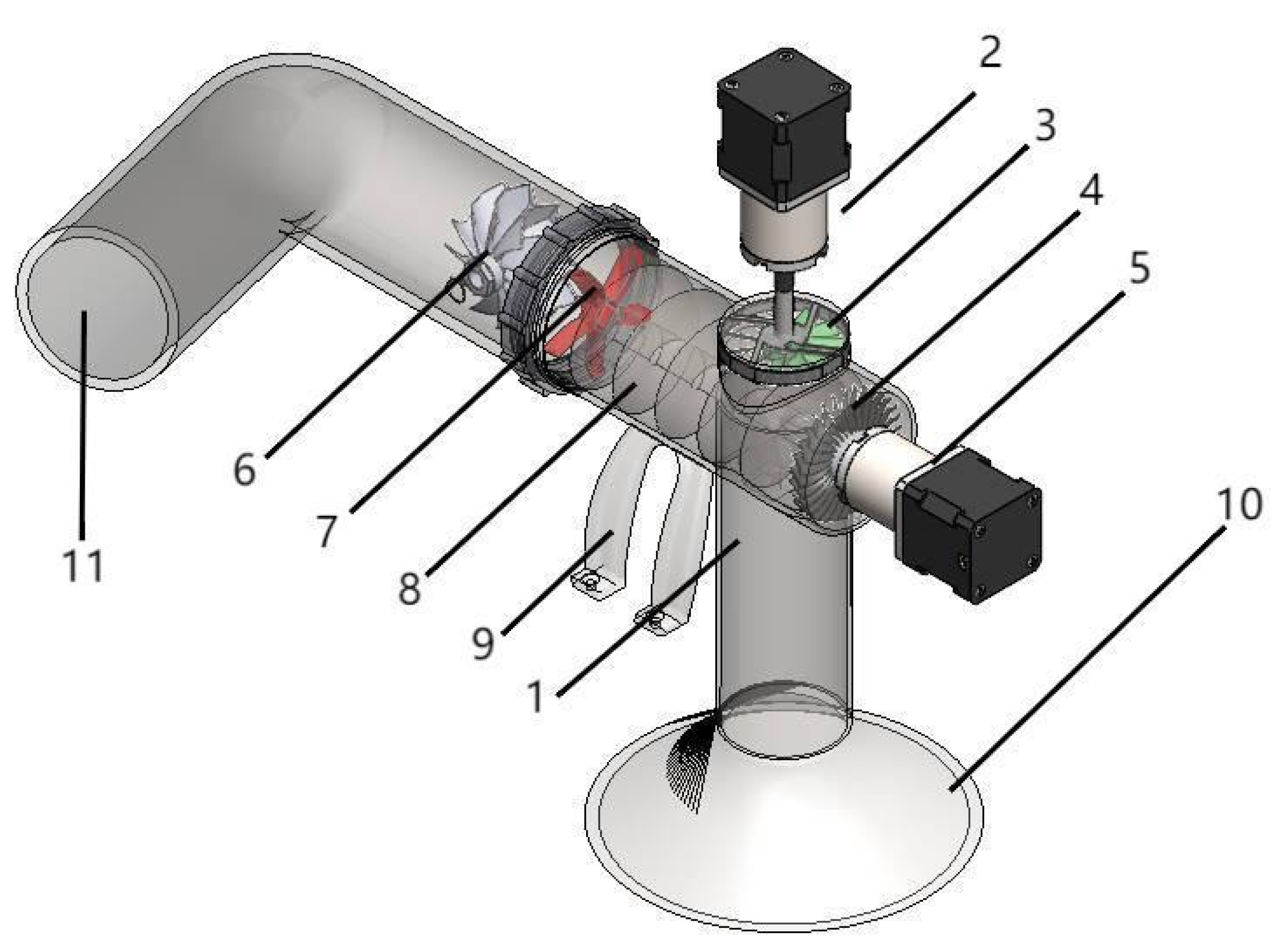
3.3. Fallen Leaf Collection and Recycling Device
3.3.1. Design of Fallen Leaf Collection and Recycling Device
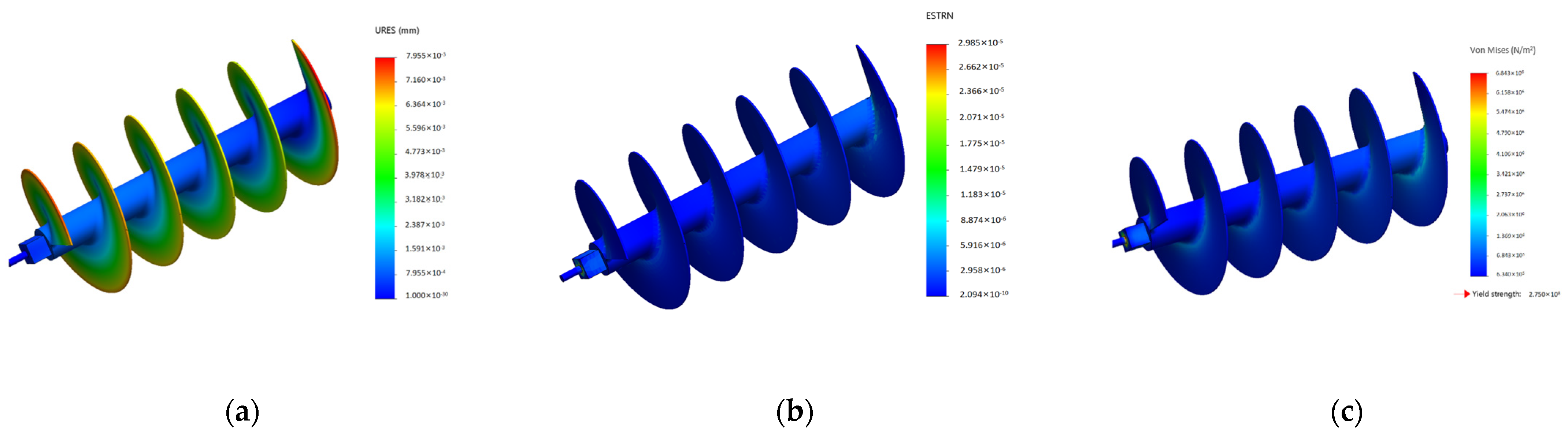
3.3.2. Static Analysis of Fallen Leaf Collection and Recycling Device
4. Design of Transmission System
4.1. Design of Power Coupling Device
4.2. Analysis of Working Mode of Dynamic Coupling Device
- (1)
- Electric driving mode
- n1 is the speed of the sun wheel;
- n2 is the speed of the outer gear ring;
- n3 is the rotation speed of the planetary frame;
- Z1 is the number of teeth of the solar wheel;
- Z2 is the number of teeth of the outer gear ring, .
- (2)
- Idle start–stop mode
- (3)
- Driving charging mode
- (4)
- Parking charging mode
- (5)
- Regenerative braking mode
5. Three-Dimensional-Printing Process and Feasibility Verification of the Model
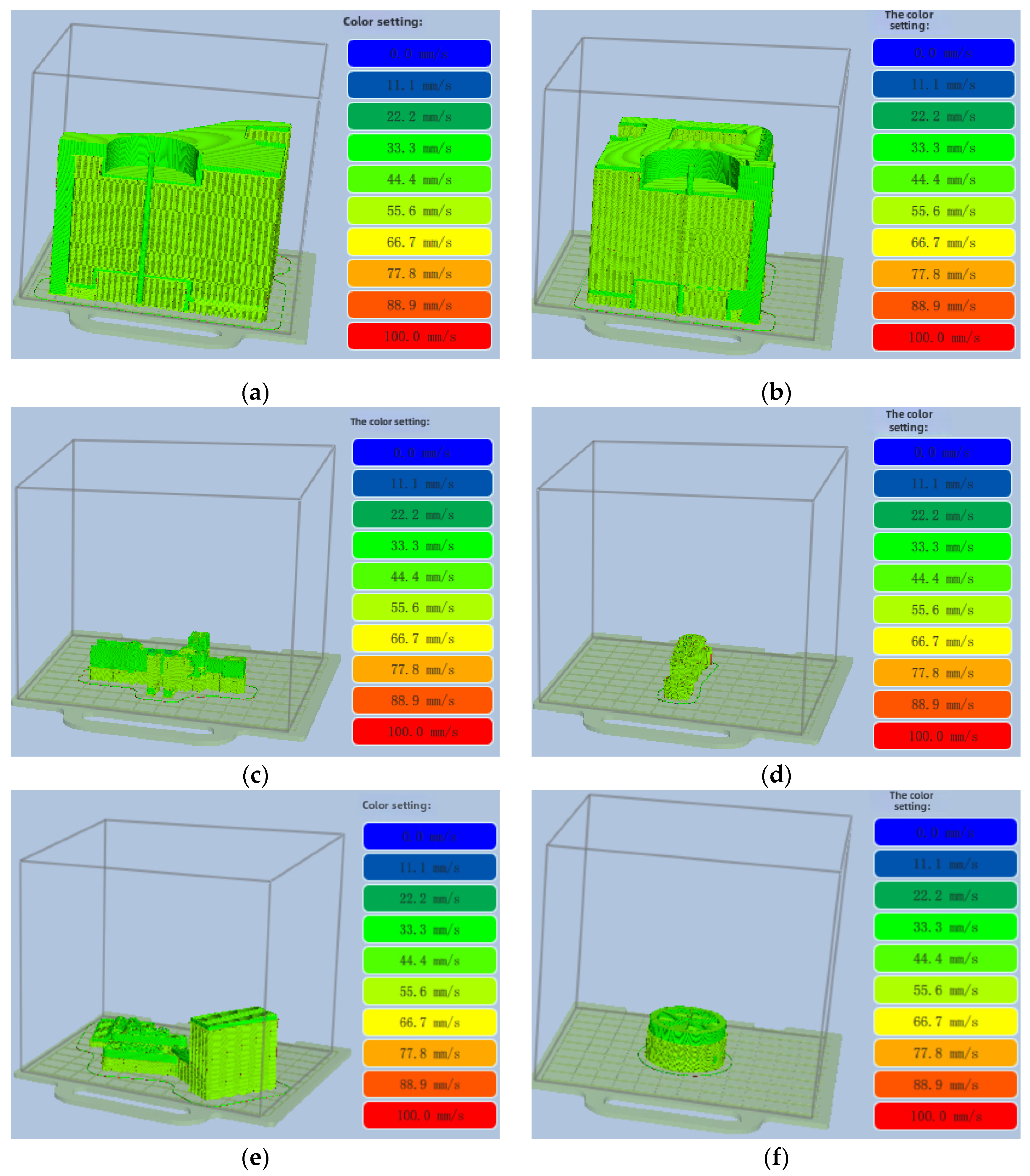
5.1. Model Slice
5.2. Printing Process
5.3. Part Assembly and Validation Analysis
6. Conclusions
- (1)
- The mechanical structure is designed and modeled, and the strength and stiffness of key components are verified via finite element analysis. The results show that the maximum stress of the wheel appears on the expansion hob; the maximum stress of the telescopic collecting brush appears at the connection between the connecting rod and the rolling brush. The maximum stress of the reamer occurs at the joint between the reamer and the shaft.
- (2)
- The transmission system of the vehicle is designed, and a dual motor torque coupling transmission without power interruption is designed. Using the working principle of the planetary gear mechanism, 12 gears can be switched, and five working modes can be selected.
- (3)
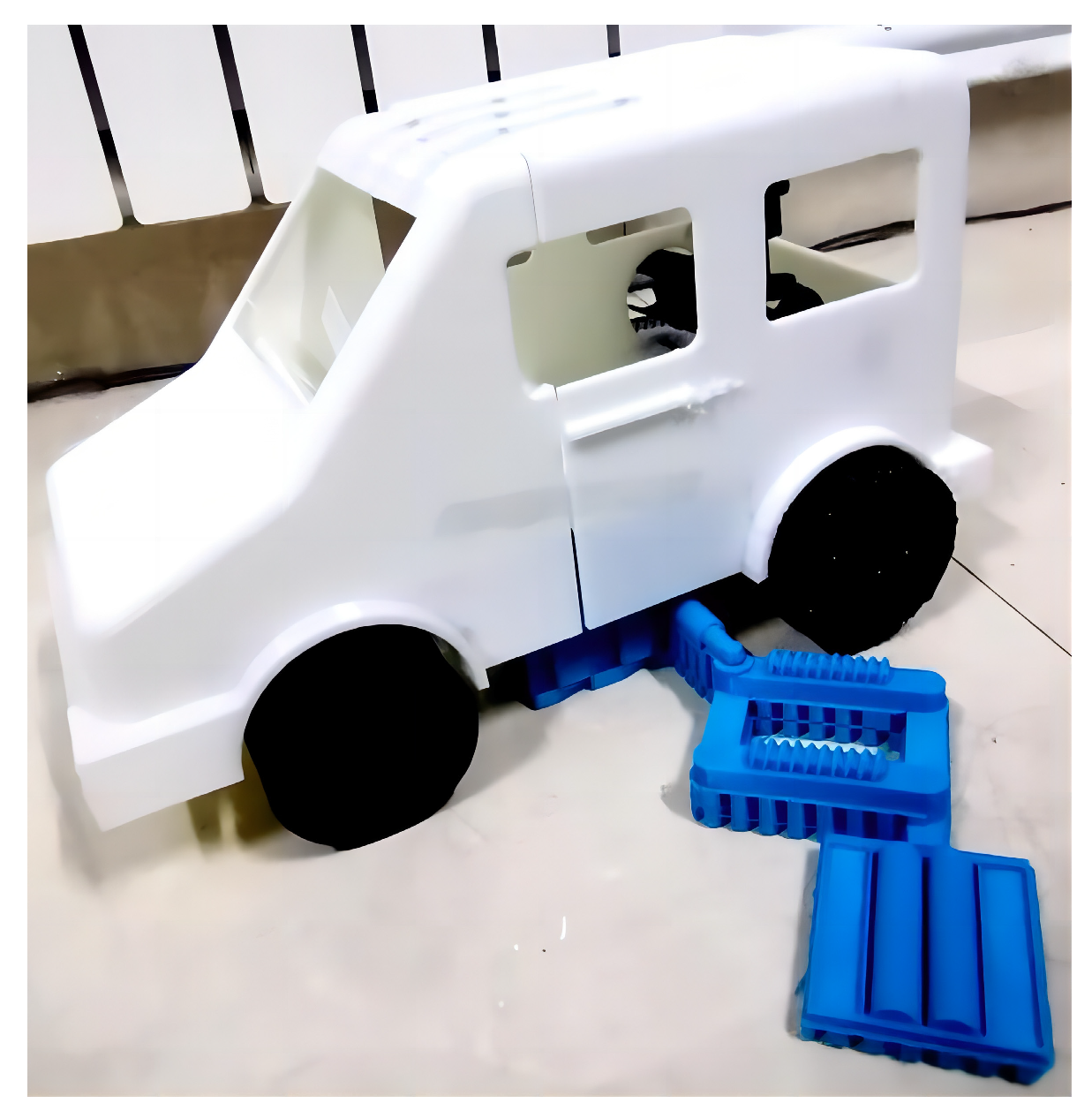
- The overall model was 3D printed, from model segmentation by area, model layered slicing, model parts printing and forming to the assembly of the overall model, which verified that the initial design concept met the assembly and production requirements of the device, and then found and improved the design problems in the process of assembling the model in terms of time.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhou, T.; Wang, J. Current situation of urban landscaping waste treatment and countermeasures of resource utilization. Guide Econ. Res. 2017, 15, 147–148. [Google Scholar]
- Tang, Z.P. Ways and strategies of garden waste resource utilization. Rural. Sci. Technol. 2021, 12, 99–100. [Google Scholar]
- Guan, X. Research on Design and Simulation of Working Device of Highway Garbage Sweeper. Master’s Thesis, Chang’an University, Xi’an, China, 2021. [Google Scholar]
- Qiao, C. Research and Design of Garbage Sweeper Based on Kansei Engineering. Master’s Thesis, Chang’an University, Xi’an, China, 2020. [Google Scholar]
- Ma, J.; Sun, S.; Rui, H. Review of Academic Research on Road Construction Machinery in China. China J. Highw. Transp. 2018, 31, 1–164. [Google Scholar]
- Li, S.; Peng, C.; Huang, D.; Hu, J.W. Design of a new type of grass leaf sweeper based on UG. Times Agric. Mach. 2017, 44, 96–98. [Google Scholar]
- Lv, L.; Zhang, P. Production of “Integrated machine for collecting and pressing fallen Leaves”. Sci. Technol. Innov. 2019, 12, 146–147. [Google Scholar]
- Natsu, N. Development of an Autonomous Blower Robot for Cleaning up and Collecting Fallen Leaves. In Proceedings of the 2023 IEEE 19th International Conference on Automation Science and Engineering (CASE), Auckland, New Zealand, 26 August–30 August 2023; IEEE: Washington, DC, USA, 2023; pp. 1–6. [Google Scholar]
- Zhong, D.; Qiao, X. Structural Design of Leaf Sweeping Vehicle. In Proceedings of the International Conference on Industrial Design and Environmental Engineering, IDEE, Zhengzhou, China, 24–26 November 2023. [Google Scholar]
- Lee, W.-C.; Chiang, W.-H. Development of a Leaf-Sweeping Robot. In Proceedings of the 2022 IEEE 5th International Conference on Industrial Cyber-Physical Systems (ICPS), Coventry, UK, 24–26 May 2022; pp. 1–5. [Google Scholar]
- Delle Donne, D.; Di Tomaso, V. Optimizing leaf sweep and collection in the Argentine city of Trenque Lauquen. Waste Manag. Res. 2021, 39, 209–220. [Google Scholar] [CrossRef] [PubMed]
- Yi, L.; Le, A.V.; Hayat, A.A.; Borusu, C.S.; Mohan, R.E.; Nhan, N.H.K.; Kandasamy, P. Reconfiguration During Locomotion by Pavement Sweeping Robot with Feedback Control from Vision System. IEEE Access 2020, 8, 113355–113370. [Google Scholar] [CrossRef]
- Hsia, S.C.; Wang, S.H.; Yeh, J.Y.; Chang, C.Y. A Smart Leaf Blow Robot Based on Deep Learning Model. IEEE Access 2023, 11, 111956–111962. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, X. Design and analysis of Walking intelligent Leaf cleaning Robot. Digit. World 2019, 1, 11. [Google Scholar]
- Sheng, X.; Guo, A.; Guo, S.; Sui, S.; Yang, W.; Tang, R.; Li, X.; Qu, P.; Wang, M.; Lin, X. Laser powder bed fusion for the fabrication of triply periodic minimal surface lattice structures: Synergistic macroscopic and microscopic optimization. J. Manuf. Process. 2024, 119, 179–192. [Google Scholar] [CrossRef]
- Guo, A.; Kong, D.; Zhou, X.; Kong, H.; Qu, P.; Wang, S.; Wang, H.; Hu, Y. Method for preparing damage-resistant 3D-printed ceramics via interior-to-exterior strengthening and toughening. Addit. Manuf. 2022, 60, 103272. [Google Scholar] [CrossRef]
- Kong, D.; Guo, A.; Wu, H.; Li, X.; Wu, J.; Hu, Y.; Qu, P.; Wang, S.; Guo, S. Four-dimensional printing of polymer-derived ceramics with high-resolution, reconfigurability, and shape memory effects. Addit. Manuf. 2024, 83, 104050. [Google Scholar] [CrossRef]
- Wu, H.; Guo, A.; Kong, D.; Li, X.; Wu, J.; Wang, H.; Qu, P.; Wang, S.; Guo, S.; Liu, C.; et al. Nacre-like carbon fiber-reinforced biomimetic ceramic composites: Fabrication, microstructure, and mechanical performance. Ceram. Int. 2024, 50, 25388–25399. [Google Scholar] [CrossRef]
- He, J.; Lv, X. Structural color printing and evaluation based on 3D printing. Pigment. Resin Technol. 2024, 53, 502–509. [Google Scholar] [CrossRef]
- Bestiara, F.; Saptaji, K.; Dewi, T.K.; Triawan, F.; Ramadhan, A.I.; Azhari, A. Development of the Extrusion Based Food 3D Printer Machine by Modifying Fused Deposition Modelling (FDM) 3D Printer. Appl. Mech. Mater. 2024, 921, 57–65. [Google Scholar] [CrossRef]
- Chen, M.Y.; Pang, R.; Lai, M.K. Investigation on Layer Thickness on Mechanical Properties and Dimension Accuracy in Fused Deposition Modelling 3D Printing. Mater. Sci. Forum 2024, 1118, 99–104. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Parameter | Quantity Value and Selection |
|---|---|
| Working weight | 1480.0 kg |
| Sweep width (one side brush) | 1.5 m |
| Side brush expansion range | 0.8 m |
| Side brush ground clearance | 10 mm |
| Ground clearance of absorption pipe | 50 mm |
| Absorption pipe diameter | 0.8 m |
| Reamer length | 0.8 m |
| Trunk capacity | 400 L |
| Maximum diameter of wheel hob | 0.85 m |
| Vehicle length | 2582 mm |
| Vehicle width | 1142 mm |
| Vehicle height | 1410 mm |
| Material Property | |
|---|---|
| Name | Stainless steel (ferrite) |
| Model type | Linear elastic homology |
| Yield strength | 1.72339 × 108 N/m2 |
| Tensile strength | 5.13613 × 108 N/m2 |
| Elastic modulus | 2 × 1011 N/m2 |
| Poisson’s ratio | 0.28 |
| Mass density | 7800 kg/m3 |
| Shear modulus | 7.7 × 1010 N/m2 |
| Thermal expansion coefficient | 1.1 × 10−5/K |
| Model | Material Property | |
|---|---|---|
 Roller | Name | Natural rubber |
| Model type | Linear elastic homology | |
| Tensile strength | 2 × 107 N/m2 | |
| Elastic modulus | 10,000 N/m2 | |
| Poisson’s ratio | 0.45 | |
| Mass density | 960 kg/m3 | |
 Connecting rod | Name | Stainless steel (ferrite) |
| Model type | Linear elastic homology | |
| Yield strength | 1.72339 × 108 N/m2 | |
| Tensile strength | 5.13613 × 108 N/m2 | |
| Elastic modulus | 2 × 1011 N/m2 | |
| Poisson’s ratio | 0.28 | |
| Mass density | 7800 kg/m3 | |
| Shear modulus | 7.7 × 1010 N/m2 | |
| Thermal expansion coefficient | 1.1 × 10−5/K | |
 Current solenoid | Name | Ductile iron |
| Model type | Linear elastic homology | |
| Yield strength | 5.51485 × 108 N/m2 | |
| Tensile strength | 8.61695 × 108 N/m2 | |
| Elastic modulus | 1.2 × 1011 N/m2 | |
| Poisson’s ratio | 0.31 | |
| Mass density | 7100 kg/m3 | |
| Shear modulus | 7.7 × 1010 N/m2 | |
| Thermal expansion coefficient | 1.1 × 10−5/K | |
| Material Property | |
|---|---|
| Name | A286 iron base superalloy |
| Model type | Linear elastic homology |
| Default failure criteria | Maximum von Mises stress |
| Yield strength | 2.75 × 108 N/m2 |
| Tensile strength | 6.2 × 108 N/m2 |
| Elastic modulus | 2.01 × 1011 N/m2 |
| Poisson’s ratio | 0.31 |
| Mass density | 7920 kg/m3 |
| Shear modulus | 7.7 × 1010 N/m2 |
| Thermal expansion coefficient | 1.65 × 10−5/K |
| Layer Thickness | 0.2 mm |
| Interlayer mass | 0.2 mm |
| Density support angle | 30° |
| Number of floors | 4 |
| Minimum area | 5 |
| Packing density | 25% |
| Support density | 20% |
| Bond strength | 30% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Liu, H.; Liu, C.; Zhao, Z.; Han, W.; Yin, L.; Guo, A. Design and Analysis of Small Fallen Leaf Collection, Crushing, and Recycling Vehicle. Processes 2024, 12, 2011. https://doi.org/10.3390/pr12092011
Zhang X, Liu H, Liu C, Zhao Z, Han W, Yin L, Guo A. Design and Analysis of Small Fallen Leaf Collection, Crushing, and Recycling Vehicle. Processes. 2024; 12(9):2011. https://doi.org/10.3390/pr12092011
Chicago/Turabian StyleZhang, Xiaowen, Haibin Liu, Chang Liu, Zhengyu Zhao, Wenchao Han, Lvfa Yin, and Anfu Guo. 2024. "Design and Analysis of Small Fallen Leaf Collection, Crushing, and Recycling Vehicle" Processes 12, no. 9: 2011. https://doi.org/10.3390/pr12092011