2.1. Notation and Models
The most common forms of mixture models are the Scheffé (canonical) polynomials. For example, the Scheffé linear model is given by
and the Scheffé quadratic model is given by
In these models,
is the response variable; each
coefficient represents the expected response when the proportion of the
i-th component equals unity; each
coefficient represents the nonlinear blending properties of the
i-th and the
j-th component proportions, and
is a random error. In this paper, we focus on the Scheffé quadratic model mixture model and possible model misspecification.
The Scheffé mixture models are linear models and can be expressed in the matrix form as
where
is the response vector,
is the
model matrix with columns associated with the
model terms (such as linear and cross-products terms),
is the
vector of model parameters, and
is the vector of random errors associated with natural variation of
around the underlying surface assumed to be independent and identically normally distributed with zero mean and variance
. The prediction properties of a design, specifically the scaled prediction variance, is dependent on the chosen model through model matrix
. The scaled prediction variance
is defined as
where
is the expansion of a mixture
to vector form corresponding to the
columns of
;
is the design size, which penalizes prediction variances for larger designs, and
is the variance of the estimated response at
. For example, if there are three components and the model is the Scheffé quadratic model, then
,
, and
is an
model matrix.
2.2. Optimality Criteria
Design optimality criteria are single valued criteria that represent different variance or parameter estimation properties of a design. Several criteria have been advanced with the purpose of constructing and comparing and designs. Four commonly used optimality criteria are the D, A, G, and IV criteria. These four criteria are functions of the information matrix
for a given design. The D and A criteria are focused on parameter estimation, while G and IV criteria are focused on the prediction variance. When a design is being considered for implementation, several of its properties can be evaluated by computing measures of design efficiency. Common D, A, G, and IV design optimality measures are
where
is the design space and
is the volume of
. The D and A criteria are the simplest to handle computationally, and they were the criteria considered in the earliest design generating algorithms (e.g., exchange algorithms). Because designs with high IV or G efficiencies also tend to have good D- and A-efficiencies, this paper will focus on designs that minimize the average prediction variance (i.e., minimize the denominator in the IV-efficiency over the entire experimental region). Designs that minimize the IV-optimality criterion include the IV-optimal design, the Q-optimal design [
17], the V-optimal design [
18], and the I-optimal design [
19,
20].
In a review of software approaches to evaluating average prediction variances (APVs), Borkowski [
21] showed that it is common for software packages to estimate the APV =
by taking the sample mean of
over a fixed set of points (e.g., the candidate set for an exchange algorithm). He demonstrated that estimation of the APV based instead on a random set of evaluation points is unbiased and superior to estimation based on a fixed set of evaluation points. This is one flaw in using software using exchange algorithms to generate IV-optimal designs: the estimated APV is an overestimation of the integral. In our proposed GA, the APV measure is calculated by averaging
over a random set of points and will provide an unbiased estimate of the IV-optimality criterion. Additionally, the variability of the estimator will decrease as the size of the random evaluation set increases. In this paper, we use 5000 random points in the evaluation set. Several authors have provided results for the IV-optimal designs, including Borkowski [
11], Syafitri et al. [
20], and Coetzer and Haines [
22]. Further details on the motivation and uses of the optimality criteria can be found in Box and Draper [
23], Atkinson et al. [
18], and Fedorov [
7].
2.3. Weighted IV-Optimality
In this paper, we develop and propose the weighted IV-efficiency, which is defined as
where
is the IV-efficiency for model
,
is the design space,
is the volume of
,
is the number of design points,
is the number of reduced models for a given full model, and
wi is the weight for model
i.
In terms of design generation, the goal is to use weighted IV-optimality to find a set of points that will minimize the weighted average of the average of the scaled prediction variance over the design region across a set of reduced models. Practically speaking, the goal is to generate a design that protects against having a final model with poor prediction variance properties. Similar to finding an IV-optimal design, the researcher must specify a model. This serves as the “full” model when we consider the weighted IV-optimality. However, unlike IV-optimality, a suite of “reduced” models are also proposed if the full model is misspecified via over-parameterization. Examining Equation (6), note that weighted IV-optimality is not restricted to a particular full model nor is it restricted to mixture models. It easily generalizes to other response surface designs and the associated models that can be fitted by those designs.
The experimenter has the freedom to choose the weighting factors for the full model, the most parsimonious or smallest model, as well as all other intermediate models. To exemplify the use of weighted IV-optimality, a “full” quadratic mixture model and a “smallest” linear mixture model will be considered.
Although there are numerous ways to assign weights in the weighted optimality criterion, in this paper, we assume (i) that not all models should be weighted equally and (ii) that only models having an equal number of model parameters receive equal weight. Here are the reasons for assuming (i) and (ii). Before running the experiment, the experimenter believes that the full model may be the most appropriate, so he/she chooses the maximum weighting factor for the full model. In the analysis phase, however, the full model might be inappropriate because of misspecification due to overparameterization. Thus, it seems reasonable that the weights be reduced as we move further away from the full (or the experimenter’s most likely a priori) model via model reduction, and stop with the smallest weight assigned to the model with the fewest number of parameters. We also treat each parameter as equally important under the assumption that the researcher has no prior knowledge or make an educated guess regarding which terms would most likely be removed if a model reduction occurs. Therefore, we assign uniform weights among all models resulting after removal of one term, and then assign a decreasing but uniform weight to all models resulting when two terms are moved, and so on. Therefore, models with more parameters have weights that reflect their greater importance relative to models with fewer parameters. For the proposed method of calculating a weighted IV-efficiency, it is necessary to have a complete enumeration of the set of subset models (reduced models) of interest. If an experimenter has justification for another weighting scheme, then it should certainly be implemented.
One specific weighting scheme consistent with (i) and (ii) above is to use weights for each reduced model based on the numbers of model parameters. Suppose model
has
parameters. The weight we assigned to model
is then defined as
where
is the
weighting factor, and
, where
is the number of parameters of the linear mixture model in Equation (2);
is the number of parameters of the quadratic model in Equation (3), and
is the number of reduced models with
parameters. The model
weight
is nonnegative and the weights satisfy
. The relative weighting factor for computing the weighting factors (supplied by the experimenter) is defined as
In this paper, we assume that the experimenter weights the quadratic mixture model 100 times the weight to be assigned to the linear mixture model; therefore, we use
= 100 as the relative weighting factor. The weighting factors are positive and subject to the restriction
There are
equispaced levels of the weighting factor, and
is the number of levels for a weighting factor. Therefore, the range of the weighting factor is defined as
The increment value of the weighting factor can be expressed as
The values of the weighting factor can be represented as follows:
Again, the weighting factor must sum to one. The weighting factor can be rewritten in the form:
Therefore, the minimum weighting factor can be expressed as
After simplifying, the increment value of the weighting factor is defined as
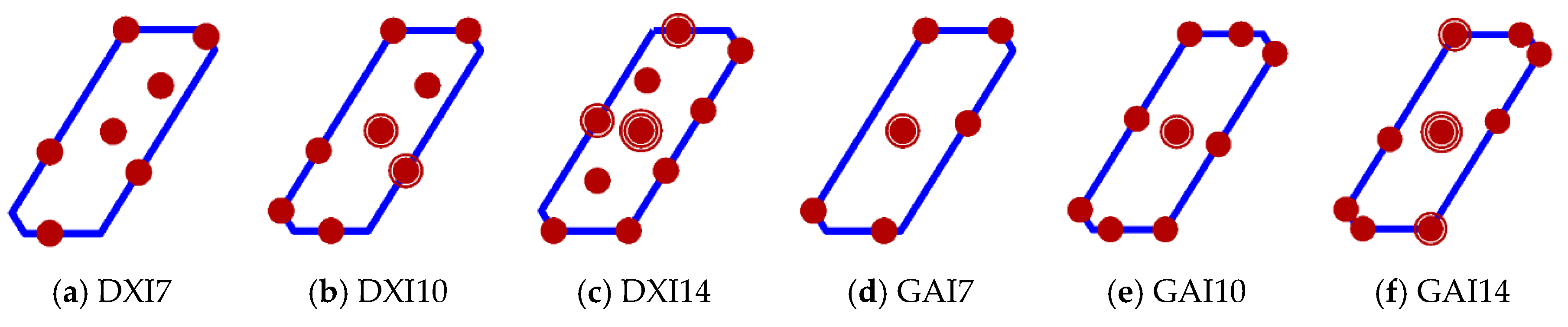
For example, suppose the full model is the quadratic mixture model with three component proportions. This model can be expressed as
There are 8 reduced models (the full model and the seven reduced models as shown in
Table 1). A 1 or a 0 in any “Terms in Model” column represents the presence or absence of that term in the model, respectively. The column
is the number of model parameters. Using 100 as the relative weighting factor, the increment value of the weighting factor is 0.1634. The weighting factor value and the weight for each model are shown in the
and
columns, respectively. If the 2nd, 3rd, and 4th models have five parameters, then
, and the 5-parameter model weighting factor
= 0.3318 and the individual model weights
, and
/3 = 0.1106.





{kind=link}
{kind=link}